对步行行人的步伐的分析
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及对步行行人的步伐的分析领域。
背景技术
一个人的行走包括一个或多个步伐的序列。跨步包括两个阶段:第一阶段,在此期间脚与地面接触;和第二阶段,在此期间脚在空中。如图1所示,跨步从一只脚接触地面时开始,到同一只脚再次接触地面时结束。
步行需要使用和协调多块肌肉。对步伐的分析因此可以用于表征个体的健康状况,尤其是表征该个体能够开发的肌肉力量。该肌肉力量可能会根据许多因素而变化,例如健身状况,年龄,个体的体能训练或个体所采取的影响其肌肉效率的治疗。
步伐的特征随时间的演变可以代表个体的健康状况的演变,特别是在患有神经肌肉疾病或神经退行性疾病的个体的情况下。这些疾病,例如杜氏肌营养不良症(DMD),会随着疾病的发展而导致个体肌肉功能的下降。这导致步伐特征的改变,步伐通常变得更慢,更短,更少。
以已知的方式,可以在测试过程中分析个体的步伐,例如六分钟步行测试(6MWT),北极星移动评估(测试NSAA)或定时的4台阶楼梯爬升测试。
6MWT包括要求个体以最大能力步行6分钟,然后分析行进的距离。6MWT用于许多领域,如骨科或各种神经肌肉病理学,并旨在测量个体所能产生的最大努力,以表征其相对于规范群体的健康状况。的确,个体开发出的最大力量代表了他的身体状态和其肌肉力量。
NSAA测试包括17项功能性活动,包括步行或跑步10分钟、在坐、站立和躺之间切换、爬上和爬下楼梯台阶、跳跃等。
最后,定时的4台阶楼梯爬升测试测量个体爬4个楼梯台阶所需的最短持续时间。
可以在不同的时间重复这些测试,以便跟踪个体健康状况的演变。但是,这样的测试是限制性的,因为它们需要在受控的环境(通常在临床中心)中、特定的路线(室内,平坦,理想的一定距离的直线路线)上进行,并且要有合格人员在场进行,为了验证预期条件。因此,个体必须定期前往临床中心进行测试。此外,个体只能在一次性会话中进行这些测试,并且该测试可能会受到影响个体在测试时的表现的外部条件(临时疲劳,动力和从一次会话到另一次会话变化的专注力,路径长度,地面附着力,测试期间给予的鼓励等)的偏见。在6MWT期间,个体在整个测试过程中可能会自愿或不自觉地走得更快或更慢。4台阶楼梯爬升测试可能非常快,因此可以观察到与测量开始有关的偏差。
因此,上述测试可能无法代表个体的总体健康状况,并且这些测试中给定个体所接受的可变性以及与临床上实质性变化相对应的值非常高。例如,对于6MWT,可接受的可变性约为15%,临床上的实质性变化约为30m。
同样以已知的方式,某些应用,例如计步器、移动电话或连接手表,允许计算个体的步伐或活动发作的次数。然后,可以通过这种设备上的GPS接收器来测量个体的行进距离。但是,这种测量缺乏准确性,并且这些应用无法确定步伐的路径。但是,步伐数量并不总是代表个体的健康状况。实际上,此参数对外部变量(例如个体的日程安排,生活方式的可能变化等)非常敏感。另一方面,个体可以以非常有限的速度或很短的长度迈出许多步伐。最后,肌肉力量的减弱或适度改善可能不会影响刚好接近个体力量或耐力极限的最常见运动。因此,简单的步伐数量计数以及简单的平均步伐长度值指示都无法以令人满意的方式表征个体的健康状况。
另外,文献US 2013/123665 A1提出使用附接到个体脚上的装置来分析个体的步伐路径。然而,该装置不执行代表个体能够开发的最大肌肉力量的步伐分析,并且不允许分析个体的健康状况随时间的演变。
发明内容
本发明的一个目的是提出一种用于分析步行行人的步伐的方法,该方法允许跟踪行人的健康随时间的演变。
本发明的另一个目的是从步伐分析中得出有关个体能够开发的最大肌肉力量的信息。
本发明的另一个目的是该方法可以连续进行,对个体的约束较少。
根据第一方面,本发明涉及一种分析步行行人的步伐的方法,该方法包括以下步骤:
(a)在记录周期期间获取行人的下肢运动的测量值,
(b)通过数据处理单元,基于运动测量值,确定行人在记录周期期间的每个步伐,
(c)将记录周期划分为记录子周期,
(d)对于多个检测到的步伐,基于运动测量值估计步伐的特征量,其中特征是步伐长度或取决于步伐长度,
(e)在由所估计的步伐特征量形成的集合内,选择预定的百分位数范围内的至少一个步伐特征量,估计的步伐特征量通过数值升序和在记录子周期内的出现来排序,
(f)对多个记录子周期重复步骤(e)。
在步骤(e)期间,在给定记录子周期内选择预定百分位数范围内的步伐特征量,这允许在给定子周期期间具有个体的健康状况的简单且相关的指示符(在这种情况下,该特征量的百分位数)。
在步骤(f)期间,对多个记录子周期重复步骤(e),这允许跟踪个体的健康状况随时间的演变。
该方法的一些优选但非限制性的特征如下,单独或结合使用:
-步伐的特征量是步伐的平均速度。
-预定的百分位数范围介于70%和100%之间。特征量的高百分位数反映了个体能够开发的最大肌肉力量。
-预定的百分位数范围由第95个百分位数组成。
-运动测量值的获取由至少一个惯性传感器(例如加速度计或陀螺仪)执行。
-惯性传感器附接到行人的下肢,例如在行人的脚踝处。这种布置,特别是与附接到个体脚上的传感器相比,在人体工程学、舒适性、美观性(传感器隐藏在裤子下)和安全性(如果附接到脚上的传感器被外部元件抓住,则有跌倒的风险)方面具有优势。
-步伐的确定包括检测绝对值大于预定阈值的加速度的给定时刻,该时刻定义了步伐的开始和前一步伐的结束。
-步伐的长度是步伐路径在水平面上的投影长度,或者是步伐路径的曲线长度,所述路径是基于运动测量值来估计的。
-步伐的平均速度是步伐长度与起点和终点之间经过的持续时间之比。
-步伐分析方法还包括以下步骤:验证步伐属于连续序列的多个连续步伐的标准,该方法的步骤(d)至(f)仅对属于连续序列的多个连续步伐的步伐执行。这样的步骤仅允许分析代表个体自然连续步行的步伐,而不会因踩踏(trampling)、孤立(isolated)的步伐或小动作而使分析产生偏差。
-当所述步伐的开始与上一步伐或下一步伐的开始之间的持续时间在0到10秒之间,优选地小于3秒时,并且当所述步伐是至少两个连续步伐的序列的一部分,优选地至少6个连续步伐的序列的一部分时,步伐属于连续序列的多个连续步伐。
-记录子周期的持续时间大于2天,优选大于15天,和/或累积记录持续时间大于5小时,10小时或50小时,优选大于180小时。这些标准允许定义一个子周期,该子周期包括足以代表个体日常活动的数据量,而在此期间该个体的健康状况可能不会发生重大变化。
根据第二方面,本发明涉及一种用于分析步行行人的步伐的设备,该设备包括:
-至少一个惯性传感器,用于在记录周期期间获取行人的下肢运动的测量值,
-数据处理单元,被配置为:
ο基于运动测量值确定行人在记录周期期间的每个步伐,
ο将记录周期划分为子周期,
ο对于多个检测到的步伐,基于运动测量值估计步伐的特征量,特征量是步伐长度或取决于步伐长度,
ο在由估计的步伐特征量形成的集合内,选择预定的百分位数范围内的至少一个步伐特征量,估计的步伐特征量通过数值升序和在记录子周期内的出现来排序,
ο针对多个子周期重复上一步骤。
根据第三方面,本发明涉及一种计算机程序产品,其包括代码指令,该代码指令用于当由处理器执行该程序时执行根据第一方面所述的用于分析步行行人的步伐的方法。
附图说明
当阅读以下通过非限制性示例的方式给出的详细描述时,本发明的其他方面、目的和优点将变得显而易见,所述详细描述将通过以下附图进行说明:
-图1是已经评论过的代表个体的步伐的示图。
-图2是根据本发明的表示用于分析步行行人的步伐的设备的示图。
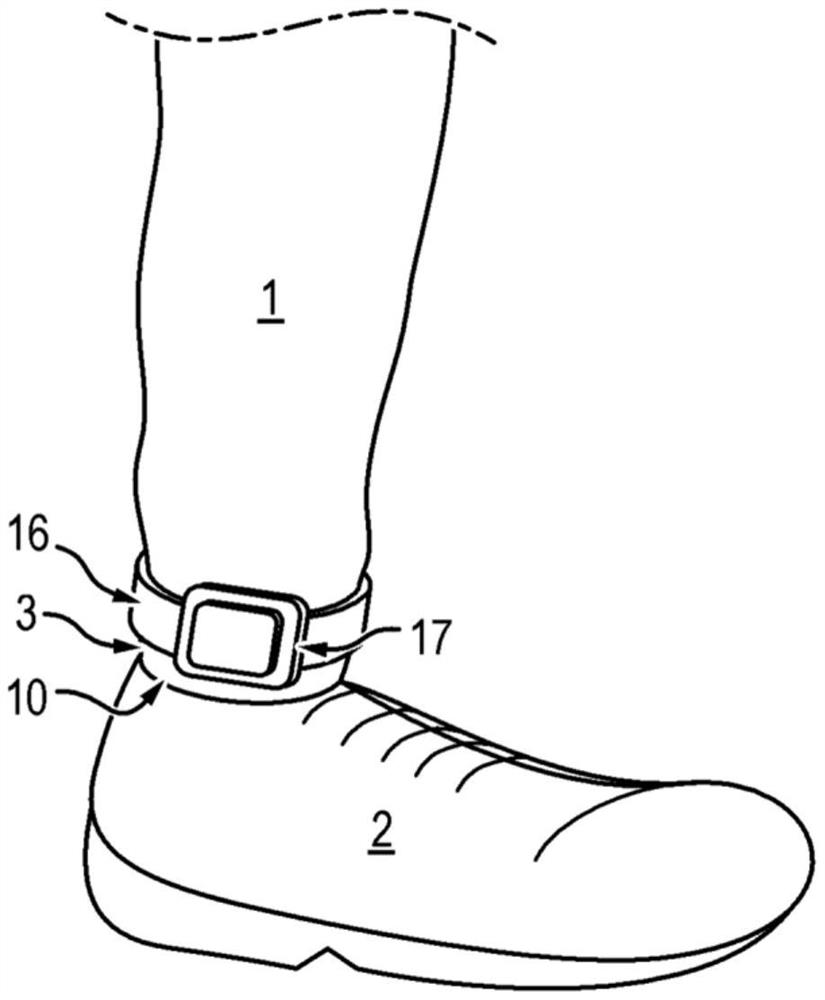
-图3是根据本发明的表示附接到行人下肢的用于分析步行行人的步伐的设备的示图。
-图4是表示在多个步伐期间脚踝路径的示例的曲线图。
具体实施方式
步伐分析设备
参考图2,步伐分析设备10包括惯性传感器11。惯性传感器11可以包括加速度计和陀螺仪。优选地,惯性传感器11包括惯性单元,该惯性单元包括至少三个加速度计和三个陀螺仪,例如MEMS类型。步伐分析设备10还可包括电池、磁力计14、高度计和/或GPS。
步伐分析设备10可以包括用于实时实施数据处理的数据处理单元12(通常是处理器)。步伐分析设备10还可以包括存储装置13(例如闪存型存储器),其能够存储由数据处理单元12进行的测量值和/或要处理或已经处理的数据。步伐分析设备10还可以包括用于发送估计位置的通信装置15。例如,佩戴者的位置可以发送到移动终端以在导航软件的界面中显示。
作为变型,步伐分析设备10可以包括用于将测量值发送到诸如移动终端或远程服务器之类的外部设备的通信装置15。这些通信装置15可以实现短程无线通信,例如蓝牙或Wifi(特别是在具有移动终端的一个实施例中),或者是用于连接到移动网络(通常是UMTS/LTE)以进行长距离通信的装置。应当注意,通信装置15例如可以是有线连接件(通常是USB),用于将数据从本地数据存储装置13传送到移动终端或服务器。然后,移动终端或远程服务器包括用于实现数据处理的数据处理单元12(通常是处理器)。
在本说明的其余部分中,将看到分别位于步伐分析设备10、移动终端和远程服务器的数据处理单元12可以等同地并且取决于应用来执行该方法的全部或部分步骤。
步伐分析设备10还可包括具有惯性传感器11的壳体17。壳体17还可包括可能的数据处理单元12,存储装置13和通信装置15。
参考图3,行人具有至少一个下肢1,例如腿。将理解的是,行人的两个下肢1中的任一者或每一个都可以安装有步伐分析设备10。
步伐分析设备10还可包括用于附接到行人的下肢1(例如脚,脚踝,胫骨或大腿)的装置16。例如,步伐分析设备10包括在行人的脚踝3处的附接装置16。壳体17的附接装置16可包括围绕下肢1的条带或钩环带,该钩环带夹住下肢1并允许其牢固地连接到壳体17(因此连接到其包括的惯性传感器11)。因此,惯性传感器11在地面参考系中的运动与行人的脚踝3的运动基本相同。此外,壳体17及其附接装置16可以在个体的裤子下面保持隐藏和保护。个体可以每天连续地佩戴壳体17,这增加了步伐分析的相关性。但是,这些惯性传感器11也可以设置在例如行人的胫骨或大腿上。
步伐分析方法
一种用于分析步行行人的步伐的方法包括以下步骤。
惯性传感器11优选地附接到行人的下肢1,例如附接到他的脚、脚踝、胫骨或大腿。优选地,惯性传感器11附接到行人的脚踝3。
步伐分析方法包括第一步骤(a):在记录周期内获取行人的下肢1的运动的测量值。获取优选地由至少一个惯性传感器11执行,例如加速度计或陀螺仪执行。运动测量值是例如行人脚踝3的加速度和角速度的测量值。
记录周期对应于个体可能佩戴步伐分析设备10的持续时间,然后惯性传感器11能够进行惯性测量。例如,个体可以在白天,即一天约十二小时,佩戴壳体17。在这种情况下,对于15天的记录周期,步伐分析设备10将完成180小时的记录。也有可能是个体一天佩戴步伐分析设备12个小时,但仅在某些日子,例如每隔一天。在这种情况下,对于相同的15天记录周期,步伐分析设备10将只完成90小时的记录。
步伐分析方法包括第二步骤(b):由数据处理单元12基于运动测量值来确定行人在记录周期内的每个步伐。这包括确定已经进行的步伐,以及确定步伐开始时刻和步伐结束时刻。
在步伐分析设备附接在行人的鞋子的情况下,可以通过寻找零角速度和加速度标准等于重力的相位来确定步伐。该方法尤其在ZUPT(零速度更新)方法的框架内是已知的,例如[Foxlin,Eric,“用鞋内惯性传感器进行行人跟踪(Pedestrian Tracking with Shoe-Mounted Inertial Sensors)”,IEEE计算机协会,2005年11月/12月,第38-46页]。
在步伐分析设备10位于脚踝3上的情况下,测得的加速度和角速度永远不会为零,包括脚2放在地面上时,因为在脚2与地面接触的阶段中围绕脚后跟旋转。因此,诸如ZUPT方法之类的方法不能直接应用,并且优选地依赖于除零或接近零测量值之外的标准来确定步伐。
根据优选实施例,对步伐的确定包括在给定时刻检测绝对值大于预定阈值的加速度,该时刻定义了步伐的开始和先前步伐的结束。实际上,在脚2撞击地面时,整个下肢1都发生震动(shock)。由加速度计测得的加速度的绝对值可能超过预定阈值。该阈值例如可以在5m/s
为了提高步伐的检测精度,可以将绝对值大于预定阈值的加速度的检测与第二步伐确定标准相结合。该第二标准可以取决于从震动以来经过的持续时间、在一定持续时间内测得的特定加速度、与震动相对应的加速度峰值、从震动以来经过的持续时间内所测得的角速度和/或取决于自震动以来经过的持续时间内的角速度变化。
更具体地,该第二标准可以采取特别是取决于上述参数中的一个或多个来最小化表达式的形式。可以在震动后的一定持续时间(例如在震动后0秒至1秒之间的持续时间,优选在震动后0.5秒的持续时间)内寻求表达式的最小值。要最小化的表达式可以用以下形式编写:
Δt
其中,Shock代表最后检测到的特定加速度峰值的值,即其标准大于预定阈值1g,优选地大于1.05g,
Δt
|accel|代表X ms内以m/s
α是一个数字,例如介于1到100之间,优选地等于12,
|Vang|
β是一个数字,例如介于1到100之间,优选地等于10,
ΔVang
步伐的开始可以对应于以下表达式最小化的时刻,该时刻也对应于前一步伐的结束。对绝对值大于预定阈值的加速度的检测与以上表达式的最小化的组合允许准确且一致地确定步伐。
作为一种变型,可以使用机器学习方法(例如神经网络,随机森林,回归或任何其他已知的统计学习算法)来识别测量变化的典型模式,该模式可以确定步伐。
步伐分析方法包括第三步骤(c):将记录周期划分为记录子周期。该步骤允许跟踪测得变量的演变,因此跟踪一个子周期接一个子周期的个体的健康状况。例如,在记录周期为六个月的情况下,有趣的是让个体的健康状况一个月接一个月地演变,然后将记录周期分为一个月的六个子周期,而不是整个记录周期只有一个结果。
记录子周期的持续时间和累积记录持续时间必须足够长以进行步伐分析,以代表个体的健康状况。根据一个优选实施例,记录子周期的持续时间大于2天,优选地大于15天,和/或累积记录持续时间大于5小时,10小时或50小时,优选地大于180小时。
实际上,如果个体在15天内没有佩戴步伐分析设备10,则相应的记录子周期的持续时间为15天,但累计记录持续时间为0小时。这样的子周期将不包括任何步伐,因此将不代表个体的健康状况。
记录的15天和180小时的持续时间是事先足够长的时间,以保证有足够的数据量来代表个体的日常活动,同时又足够短以使个体的健康状况在该持续时间内不会被实质性地改变。这样的持续时间还允许减小测量值的可变性,同时对于佩戴步伐分析设备10的个体不代表太大的约束。
作为变型,仅必须满足子周期的持续时间和累积记录持续时间的这些标准中的一个。
步伐分析方法包括第四步骤(d):对于多个检测到的步伐,基于运动测量值估计步伐的特征量。估计的特征量可以例如是平均步伐速度或步伐长度。
优选地,数据处理单元12在记录周期期间估计脚踝3的路径。该估计可以通过对运动测量值的两次积分来进行,优选地,每当脚2接触地面时就重新调节该两次积分。在文档FR3 042 266中描述了一种用于估计脚踝路径的设备。图4表示在三个连续步伐内估计的路径表示的示例。
根据优选实施例,步伐的长度是步伐路径在水平面(即,与佩戴步伐分析设备10的个体行走的地面平行的平面)上的投影的长度,如上所述,基于运动测量值来估计路径。作为变型,步伐的长度可以是例如所估计路径的曲线长度,而无需将其投影到水平面。
步伐的平均速度可以由步伐的长度与其持续时间之比来定义,步伐的持续时间对应于其开始和结束之间经过的持续时间。
与在步行过程中连续考虑或以高频采样瞬时步伐速度的情况相比,平均步伐速度的确定有多个优点。事实上,非常慢的步伐的持续时间比快速步伐的更长,与较快的步伐相比,非常慢的步伐与更高的速度相关联,这将改变对结果的分析。此外,路径的推导使得可以估计瞬时速度将产生可能影响估计瞬时速度值的噪声。最后,将单个平均速度分配给给定步伐可以通过减少待处理数据的数量来简化数据处理,目的是对这些数据进行后续统计计算。
另一个实施例包括在计算允许的采样频率下考虑整个路径的速度,在一个优选实施例中,在50Hz和1,000hz之间,优选地在100Hz附近。
步伐分析方法包括第五步骤(e):在由估计的步伐特征量形成的集合内,选择预定百分位数范围内的至少一个步伐特征量(例如平均速度和/或长度),估计的步伐特征量通过数值升序和在记录子周期内的出现来排序。
步伐可以与它的日期、时间和/或开始时刻和/或结束时刻相关联,这允许它与给定的记录子周期相关联。步伐也可以与其特征量(例如其平均速度和/或其长度)相关联。给定子周期的步伐可通过使特征量的值升序进行排序。
然后可以对由估计的步伐特征量(例如平均速度和/或长度)形成的集合进行统计计算,估计的步伐特征量通过数值升序和在记录子周期内的出现来排序。特别地,相对于记录子周期的步伐的特征量的集合,可以计算该特征量的平均值和/或百分位数。例如,可以计算给定子周期的步伐特征量的第50个百分位数(对应于中位数)、第80个百分位数、第95个百分位数或任何其他百分位数值。
可以定义预定范围的百分位数,该范围的百分位数与步伐分析相关。特别地,高百分位数代表个体能够开发的最大努力和最大肌肉力量,因为它们反映了个体的最快和/或最长的步伐,而步行速度受肌肉力量状态的约束。因此,这些高百分位数对个体的健康状况特别敏感。在本申请中,术语“高百分位数”用于指大于第70个百分位数的百分位数。
这种用于分析来自高百分位数范围的步伐的方法特别适合于步行,因为个体在日常生活中在统计学上实现许多更长和/或更快的步伐。特别地,最长和/或最快的百分之几的步伐代表个体能够开发的最大力量。例如,研究表明,在同一个体中,诸如6MWT之类的努力测试测量结果与步伐长度和/或速度的第95个百分位数之间存在相关性。
优选地,预定范围的百分位数在第70个百分位数和第100个百分位数之间。预定范围的百分位数可以由第95个百分位数组成。
步伐分析方法包括第五步骤(f):对多个记录子周期重复步骤(e)。
这样的步骤(f)允许在多个记录子周期内访问预定百分比范围内的步伐特征量。优选地,预定百分位数范围对于重复步骤(e)的每个子周期而言是相同的。因此,可以一个子周期接一个子周期地跟踪步伐特征量的演变。然后可以追踪佩戴步伐分析设备10的个体的健康状况随时间的演变。
在优选实施例中,步伐分析方法还包括验证步伐属于多个连续步伐的连续序列的标准的步骤,该方法的步骤(d)到(f)仅对属于多个连续步伐的连续序列的步伐执行。
当个体处于动量状态时,这种步骤仅允许分析来自连续自然走动的数据。因此,数据不太可能因个体的大量踩踏、孤立的步伐或微小运动而产生偏差,这些步伐并不代表个体的健康状况。因此,用于计算预定范围的百分位数(特别是第95个百分位数)所考虑的步伐不考虑孤立的步伐或踩踏,这消除了相应的测量偏差。
优选地,当所述步伐的开始与前一步伐或后一步伐的开始之间的持续时间在0到10秒之间(优选地小于3秒)时,并且当所述步伐是至少两个连续步伐(优选地是至少6个连续步伐)的序列的一部分时,所述步伐属于多个连续步伐的连续序列。
实际上,两个步伐之间的持续时间大于例如0.5秒,3秒或10秒,指示个体很可能在两个步伐之间停止。那么,步伐对应于踩踏,不属于相同的步行序列,也不反映个体的健康状况。
此外,在少于例如十个、六个或两个连续步伐的序列中,该个体先天不是以正常的步行速度而是以缓慢的速度,这对应于踩踏或轻微的运动。
这两个标准的组合不允许处理不代表个体连续走动以及他能够开发的肌肉力量的步伐。作为变型,对于要执行的方法的步骤(d)至(f),仅必须验证以上两个标准之一。
在仅处理代表个体健康状况的步伐的相同目的的情况下,例如在计算路径或确定其开始和结束时,就有可能识别出带有误差的步伐。为此,可以将步伐的路径与一个或多个参考路径进行比较。可以研究路径的形状,可以验证步伐中部附近的最大垂直位置的存在,可以定义路径的高度和长度之比。然后,与鉴于参考路径而预期的特征过度偏离的步伐被识别为错误的,方法的步骤(d)至(f)不对这些步伐执行。因此,在路径的计算、步伐的确定等中可能的错误不会使数据分析有偏差。
作为变型,机器学习算法(例如神经网络,随机森林,SVM或任何其他已知方法)可以用于将步伐与参考步伐数据库进行比较,从而识别错误的步伐。
另外,有可能识别出每次步行的第一步伐和最后一个步伐,方法的步骤(d)至(f)不对这些步伐执行。事实上,这些步伐并不能代表个体的连续行走。
也可以识别包括路线改变的步伐,不对这些步伐执行方法的步骤(d)至(f)。因此,仅保持属于直线行走的步伐。实际上,路线的改变会导致速度减慢,因此包括路线改变的步伐并不代表个体的连续行走和动量。另外,这种步伐可能不太好确定,步伐的旋转和加速度的模式通过路线改变而变化。
步伐分析方法的步骤(a)可以由步伐分析设备10的至少一个惯性传感器11实现。
步伐分析方法的步骤(b)至(f)以及上述可能的附加步骤可以由步伐分析设备10的数据处理单元12实施。
- 对步行行人的步伐的分析
- 步行分析方法及步行分析系统