一种舷侧双节跳板与码头实时距离的测距方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及一种舷侧双节跳板与码头实时距离的测距方法,涉及大型滚装船码头滚装作业安全技术领域,属于船舶设计技术领域。
背景技术
滚装船通常在车辆库设置舷侧跳板,船侧靠码头时,跳板打开搁码头,在码头与车辆库之间形成车辆滚装转运的通道。为提高跳板的码头潮位适应能力,舷侧跳板通常采用双节跳板型式以增加跳板长度,与船体铰接的称作第一节跳板,搁码头的称作第二节跳板,第二节跳板与第一节跳板铰接。第一节跳板由于背板线型的限制,不能搁靠码头,在跳板搁码头通行车辆时需要与码头表面保持一定的安全距离。对此距离的实时监测目前除了依靠费力且不可靠的人工观测外,还有采用超声波传感器的方法,超声波传感器安装在第一节跳板背板外端,但是当跳板搁靠斜坡码头时,码头端部常涉水,此时传感器测得的为跳板背板到水面的距离,小于实际距离,导致误报警。
发明内容
根据上述问题,本发明的目的在于提供一种第一节跳板与码头实时距离的测距方法,利用实时获取的船舶状态参数和跳板开启角度自动计算,能够适应斜坡码头,且不需要额外安装其他监测设备,具有可靠性和便捷性。
为实现上述目的,本发明采取的技术方案为:一种舷侧双节跳板与码头实时距离的测距方法,其特征在于,包括以下步骤:
步骤S1:输入码头的坡度λ;
步骤S2:传感器测量船舶左、右舷吃水值,分别设为T1和T2,根据左、右舷吃水传感器的横向距离T3,换算得到船舶实时横倾角度θ为:
步骤S3:传感器获取舷侧第一节跳板相对于关闭位置的打开角度C1,以及第二节跳板顶板与第一节跳板顶板的夹角B2;
步骤S4:根据舷侧中间铰链与第二节跳板端部圆钢的中心连线与第二节跳板顶板的夹角A2、步骤S3中获取的B2、C1、第一节跳板处于关闭位置时其顶板与垂直车辆甲板辅助线的夹角A1、步骤S2中计算得到的θ,计算角度D为:
D=360°+A2-B2-C1-(A1-θ)
步骤S5:根据舷侧中间铰链与第二节跳板端部圆钢的中心连线长度L1、步骤S4中计算得到的D,计算H1为:
H1=L1cosD
步骤S6:根据步骤S1中输入的码头坡度λ,以及第二节跳板端部圆钢的半径R,计算H2为:
H2=Rcosλ
步骤S7:根据已知的L1、R、λ、和步骤S4中计算得到的D,计算H3为:
H3=(L1sinD+Rsinλ)tanλ
步骤S8:根据已知的A1、步骤S2中计算得到的θ、步骤S3中获取的C1,计算第一节跳板顶板与水平线的夹角C2为:
C2=C1+A1-θ-90°
步骤S9:作中间铰链中心与第一节跳板顶板的垂线、中间铰链中心与第一节跳板背板的端部连线,两者的夹角已知,设为E,根据步骤S8中计算得到的C2,计算中间铰链中心与第一节跳板背板的端部连线与竖直的夹角F为:
F=180°-E-C2
步骤S10:根据中间铰链中心与第一节跳板背板的端部连线长度L2、步骤S9中计算得到的F、以及码头30的坡度λ,计算H4和H5分别为:
H4=L2cosF
H5=L2sinFtanλ
步骤S11:根据步骤S5~S7中计算得到的H1、H2和H3、以及步骤S10中计算得到的H4和H5,计算第一节跳板背板与码头表面的最小距离H为:
H=H1+H2+H3-H4-H5
本发明技术方案特点在于,首先由用户输入码头坡度,然后由传感器实时获取船舶横倾角度和两节跳板开启角度,通过跳板搁靠码头几何模型可以计算出第一节跳板背板与码头表面的最小距离。整个过程仅需要用户输入码头坡度,计算自动进行,普遍适用于固定平码头和斜坡码头,可靠、便捷。
附图说明
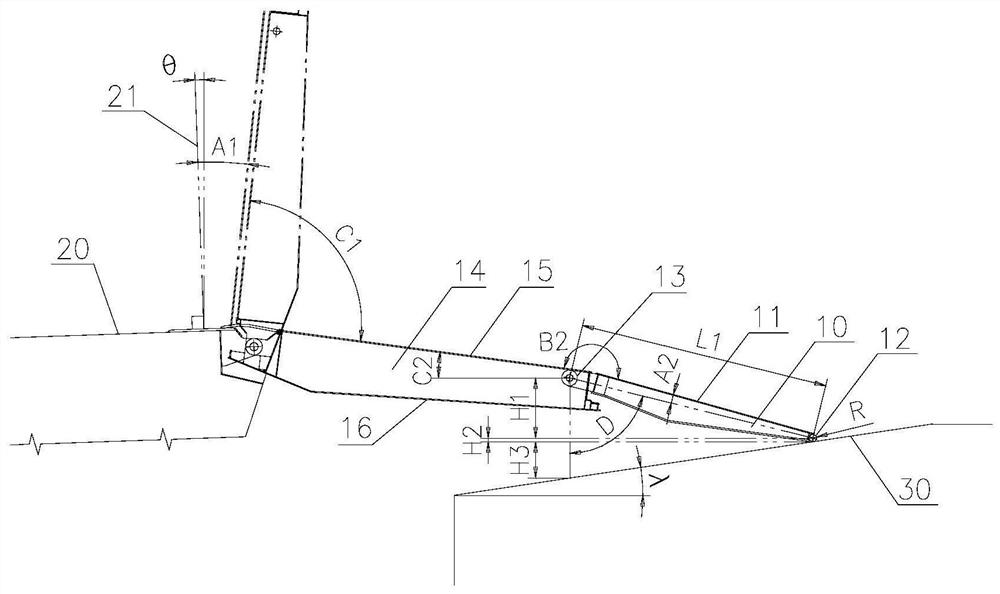
图1为本发明的测距几何模型示意一;
图2为本发明的测距几何模型示意二;
其中,图示为跳板沿船长方向中心线所在横剖面,以右舷舷侧跳板为例;
附图中:10、第二节跳板;11、第二节跳板顶板;12、第二节跳板端部圆钢;13、两节跳板中间铰链;14、第一节跳板;15、第一节跳板顶板;16、第一节跳板背板;20、车辆甲板;21、垂直于车辆甲板的辅助线;30、码头。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
图1和图2是本发明的计算几何模型,为右舷舷侧跳板的情况,请参见图1和图2。示出了本发明用于计算舷侧双节跳板与码头实时距离的测距方法,为一种较佳实施例,包括:
步骤S1:由用户输入码头30的坡度λ(对于平码头,取λ=0)。
步骤S2:利用设置在船舶左、右舷的吃水传感器实时获取船舶左、右舷吃水值,分别设为T1和T2,根据左、右舷吃水传感器的横向距离T3,换算得到船舶实时横倾角度θ为:
步骤S3:利用舷侧跳板的角度传感器实时获取第一节跳板14相对于关闭位置的打开角度C1,以及第二节跳板顶板11与第一节跳板顶板15的夹角B2。
步骤S4:根据中间铰链13与第二节跳板端部圆钢12的中心连线与第二节跳板顶板11的夹角A2(已知参数),步骤S3中获取的B2、C1,第一节跳板14处于关闭位置时其顶板15与线21的夹角A1(已知参数),步骤S2中计算得到的θ,计算角度D为:
D=360°+A2-B2-C1-(A1-θ)
步骤S5:根据中间铰链13与第二节跳板端部圆钢12的中心连线长度L1(已知参数),步骤S4中计算得到的D,计算H1为:
H1=L1cosD
步骤S6:根据步骤S1中输入的码头30坡度λ,以及第二节跳板端部圆钢12的半径R,计算H2为:
H2=Rcosλ
步骤S7:根据已知的L1、R、λ,和步骤S4中计算得到的D,计算H3为:
H3=(L1sinD+Rsinλ)tanλ
步骤S8:根据已知的A1,步骤S2中计算得到的θ,步骤S3中获取的C1,计算第一节跳板顶板15与水平线的夹角C2为:
C2=C1+A1-θ-90°
步骤S9:作中间铰链13中心与第一节跳板顶板15的垂线、中间铰链13中心与第一节跳板背板16的端部连线,两者的夹角已知,设为E,根据步骤S8中计算得到的C2,计算中间铰链13中心与第一节跳板背板16的端部连线与竖直的夹角F为:
F=180°-E-C2
步骤S10:根据中间铰链13中心与第一节跳板背板16的端部连线长度L2(已知参数),步骤S9中计算得到的F,以及码头30的坡度λ,计算H4和H5分别为:
H4=L2cosF
H5=L2sinFtanλ
步骤S11:根据步骤S5~S7中计算得到的H1、H2和H3,以及步骤S10中计算得到的H4和H5,计算第一节跳板背板16与码头30表面的最小距离H为:
H=H1+H2+H3-H4-H5
根据用户输入的码头坡度,实时获取的船舶左右舷吃水换算得到的船舶横倾角度,以及实时获取的两节跳板开启角度,即可计算出第一节跳板背板与码头表面的实时最小距离。整个过程仅需要用户输入码头坡度,其他参数为已知的船舶和跳板特性参数或通过内置通信自动获取,计算过程自动进行,该计算方法普遍适用于固定平码头和斜坡码头,可靠、便捷,能有效提高装卸作业的安全性。
以上所述仅为本发明较佳的实施例,并非因此限制本发明实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
- 一种舷侧双节跳板与码头实时距离的测距方法
- 一种舷侧双节跳板与码头实时距离的测距方法