一种直翼式仿生扑翼飞行机器人
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及一种直翼式仿生扑翼飞行机器人,属于机器人技术领域。
背景技术
扑翼机器人是指像鸟或昆虫一样利用翅膀的运动产生升力和推力以达到飞行目的的机器人,其特征是:通过翅膀的上下扑动运动,运用拍打空气的反力作为推进力和升力,通过调节尾翼的方向改变机器人飞行的姿态。
目前仿生扑翼机器人的研究仍处于初期阶段,主要以鸟与昆虫为原型进行设计研发。2011年德国自动化公司Festo推出了一款仿生海鸥机器人-SmartBird,其重量为450克,翼展1.96米,可以模拟鸟类飞行,同时仿真度高,远距离时能以假乱真;
现有技术翅膀扑动角度与幅值不可调整,需要在极为苛刻的条件下才能起飞。
发明内容
本发明的目的在于提供一种直翼式仿生扑翼飞行机器人,以解决现有技术翅膀扑动角度与幅值不可调整的缺陷。
一种直翼式仿生扑翼飞行机器人,包括主躯干组件、机翼组件和尾翼组件,包括扑动角度调整组件、驱动组件、能源组件、通信组件、尾翼控制组件、平衡控制组件;
所述驱动组件位于主躯干组件的一端;驱动组件用以驱动扑动角度调整组件动作;
所述扑动角度调整组件一端与驱动组件连接,另一端与机翼组件连接;扑动角度调整组件用以带动机翼组件动作、调整机翼组件角度;
所述尾翼控制组件位于主躯干组件的另一端,尾翼控制组件用以控制尾翼组件;
所述平衡控制组件设置在主躯干组件,平衡控制组件用以调整主躯干组件的重量平衡;
所述能源组件设置在主躯干组件,用以给各用电部件供电;
所述通信组件设置在主躯干组件,用以接收用户侧的控制指令,控制扑动角度调整组件、驱动组件、尾翼控制组件。
进一步地,所述驱动组件包括直流电机;
所述直流电机通过电机出轴设有一级主动直齿轮,所述一级主动直齿轮啮合有一级被动齿轮,所述一级被动齿轮连接有一级旋转轴,所述一级旋转轴的另一端设有二级主动直齿轮,所述二级主动直齿轮啮合有二级被动直齿轮,所述二级旋转轴贯穿二级被动直齿轮与扑动角度调整组件连接。
进一步地,所述扑动角度调整组件包括曲柄、水平调整螺栓、鱼眼轴承和前后调整螺栓;
所述曲柄对称布设在二级旋转轴的两端,所述水平调整螺栓固定在曲柄顶端,所述鱼眼轴承一端固定在水平调整螺栓上,另一端固定在前后调整螺栓上,所述前后调整螺栓通过固定在机翼组件下端。
进一步地,所述的遥控组件包括电调和传感器,所述的电调一端与直流电机通过输出插头连接,另一端与能源组件通过输入插头连接。
进一步地,所述的电调固定在机身底端的一侧,所述的传感器和电池固定在所述的平衡控制组件上,通过调整传感器和电池的位置来控制主躯干组件整体的平衡。
进一步地,所述尾翼控制组件包括升降控制舵机、转向控制舵机、单臂转向臂、升降连杆、双臂转向臂和尾翼;
所述单臂转向臂固定在升降控制舵机的输出端,所述升降连杆一端与单臂转向臂连接,另一端用于安装转向控制舵机,所述的双臂转向臂固定在转向控制舵机上,所述转向控制舵机的输出端通过双臂转向臂与尾翼组件连接。
进一步地,所述转向控制舵机和升降控制舵机的信号线与传感器连接,实现转向和升降的控制,所述的电调的信号线插在传感器连接,实现电机转速的控制。
进一步地,所述所述的主躯干组件包括机身、轴定位机架、翅膀定位架和尾翼限位杆;
所述轴定位机架固定在机身的轴定位孔中,所述的翅膀定位机架对称安装在机身的两端,所述尾翼限位杆固定在机身的尾端,用于限制升降连杆的上下运动角度。
进一步地,所述机翼组件包括翅膀前连杆和翅膀后连杆,所述翅膀前连杆和翅膀后连杆固定在翅膀定位架上。
进一步地,所述一级旋转轴与二级旋转轴设于轴定位机架上,所述轴定位机架与机身连接。
与现有技术相比,本发明所达到的有益效果:本发明通过扑动角度调整组件带动机翼组件上下方向调整,驱动组件和尾翼控制组件带动尾翼使可进行上下和左右方向调整;扑动角度调整组件改变翅膀扑动角度和扑动幅值的大小,可根据外界环境的不同随时调整飞行状态,极大地提高了机器人的气动性。
附图说明
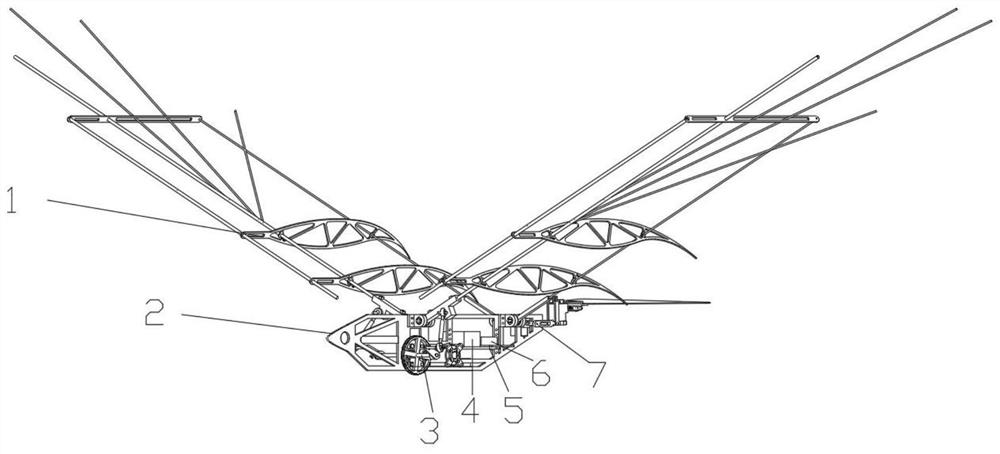
图1图1为直翼式仿生扑翼飞行机器人外观效果图;
图2为直翼式仿生扑翼飞行机器人正视效果图;
图3为直翼式仿生扑翼飞行机器人驱动组件效果图;
图4为直翼式仿生扑翼飞行机器人飞行组件效果图;
图5为直翼式仿生扑翼飞行机器人尾翼控制组件效果图。
图中:1、飞行组件;2、主躯干组件;3、驱动组件;4、电池;5、平衡控制组件;6、遥控组件;7、尾翼控制组件;8、机身;9、轴定位机架;10、二级旋转轴;11、碳纤维杆;12、碳纤维板;13、翅膀前连杆;14、一级被动齿轮;15、一级主动齿轮;16、电机出轴;17、横向平衡块;18、翅膀后连杆;19、降控制舵机;20、尾翼限位杆;21、尾翼组件;22、尾翼固定件;23、双臂转向臂;24、转向舵机;25、转向舵机固定块;26、升降连杆;27、单臂转向臂;28、翅膀定位架;29、前后平衡块;30、电调;31、传感器;32、螺柱;33、直流电机;34、二级主动齿轮;35、前后调整螺栓;36、鱼眼轴承;37、水平调整螺栓;38、曲柄;39、二级被动齿轮;40、一级旋转轴。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1-图5所示,公开了一种直翼式仿生扑翼飞行机器人,如图1所示,由飞行组件1、主躯干组件2、驱动组件3、电池4、平衡控制组件5、遥控组件6和尾翼控制组件7、机翼组件和尾翼组件和扑动角度调整组件组成;
如图2、图3所示,无刷直流电机33通过4根六角螺柱固定在机身8一侧对应的螺纹孔内,电机出轴16通过3根螺栓固定在电机转子上,一级主动齿轮15通过紧定螺钉固定在电机出轴16上,由于无刷直流电机噪声小,机器人具有很好的隐蔽性,本发明采用无刷直流电机驱动,噪声小,能在中低空进行高速飞行,进行侦察任务;一级旋转轴40一端与一级被动齿轮14通过紧定螺钉连接,二级主动齿轮34通过紧定螺钉连接在一级旋转轴40的另一端,二级被动齿轮39与二级旋转轴10通过紧定螺钉连接,一级旋转轴40和二级旋转轴10与轴定位机架9分别通过轴承连接,轴定位机架9安装在机身8的轴定位孔中,轴定位孔为类似于跑道的环状结构,可通过调节轴定位机架的位置保证齿轮啮合。本发明驱动组件采用二级齿轮传动,能极大提高扭矩,齿轮布置在机身两侧,提高了机器人飞行的稳定性,保证曲柄38能对称布置在二级旋转轴10的两端,使得左右两翅膀煽动的频率和幅度始终保持一致;由于轴定位机架9可调整位置,可以随时保证齿轮啮合情况,降低了齿轮磨损、零件加工精度误差所带来的影响。
如图2、图4所示,扑动角度调整组件包括对称安装在二级旋转轴10两端的曲柄38,并将水平调整螺栓37通过螺母紧固在曲柄38上方安装孔中,鱼眼轴承36一端内孔插在水平调整螺栓37上,并通过增减螺母调整鱼眼轴承36水平位置,前后调整螺栓35通过螺母紧固在翅膀前连杆13下方的安装孔中,鱼眼轴承36另一端内控插在前后调整螺栓35上,并通过增减螺母调整鱼眼轴承36前后位置;
机翼组件包括,翅膀前连杆13通过轴连接安装在翅膀定位架28上,翅膀定位架28通过螺栓连接固定在机身8上;本发明翼展长度可达2米,体长600毫米,重量约为500克,其形状与鸟类类似,具有较高的仿生性能。
平衡控制组件5包括横向平衡块17和前后平衡29,所述的前后平衡块29通过螺栓连接固定在机身8的升降固定孔中,所述的升降固定孔有6个,可调节平衡控制组件5的高度;具有快速调节平衡功能,通过调整能源组件4和传感器在平衡控制组件上的位置实现机身的平衡;
工作过程:通电后,通过遥控器控制将信号传输给传感器31,传感器31接收信号,启动电机33,电机转子转动带动电机出轴16与一级主动齿轮15转动,一级主动齿轮15带动一级被动齿轮14转动,转速比为1:5,一级被动齿轮14带动一级旋转轴40以及二级主动齿轮34转动,二级主动齿轮34带动二级被动齿轮39转动,转速比4:25,二级被动齿轮39带动二级旋转轴10转动,二级旋转轴10带动曲柄38与水平调整螺栓37绕二级旋转轴10轴心转动,水平调整螺栓37带动鱼眼轴承36运动,鱼眼轴承36带动前后调整螺栓35与翅膀前连杆13绕翅膀定位架28轴心实现上下扑动,翅膀前连杆13的上下扑动带动翅膀上下扑动。通过调整前后调整螺栓35、鱼眼轴承36和水平调整螺栓37改变翅膀的扑动角度和幅值,能极大地提高机器人地升力和前进力。
如图5所示,升降控制舵机19通过螺栓连接固定在机身8上,单臂旋转臂27通过螺栓连接固定在升降控制舵机19的转轴上,单臂转向臂27和升降连杆26通过铰连接,尾翼限位杆20胶合在机身8尾端,并插在升降连杆26的滑块槽内;转向控制舵机24固定在升降连杆26尾端,双臂转向臂23通过螺栓连接固定在转向控制舵机24的转轴上,尾翼固定件22与双臂转向臂23通过螺栓连接,尾翼组件21与尾翼固定件22通过螺栓连接;本发明翅膀采用碳纤维杆与碳纤维杆拼接粘合成鸟类翅膀的形状作为骨架,并用玻璃纤维将骨架包裹,质量轻,其骨架下方具有上凹的弧度,极大地提高了升力。
当需要进行转向操作时,操作遥控器的转向手柄,将控制信号传给传感器31,由传感器31将信号传输给转向舵机24,舵机转轴转动带动尾翼组件21实现转动,机器人实现转向操作。
当需要进行升降操作时,操作遥控器的升降手柄,将控制信号传给传感器31,由传感器将信号传输给升降舵机19,升降舵机19控制单臂转向臂27转动,单臂转向臂27带动升降连杆26沿尾翼限位杆20运动,升降连杆26的运动带动尾翼21实现上下偏转;本发明通过两台舵机控制单个尾翼,使得机器人能够自由地实现转向和升降功能。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 一种直翼式仿生扑翼飞行机器人
- 基于变形翼实现扑旋翼和扑翼飞行模式转换的仿生飞行器