一种基于图像识别的无人机自动评分系统及方法
文献发布时间:2023-06-19 10:11:51
技术领域
本发明涉及无人机技术领域,更具体地,涉及一种基于图像识别的无人机自动评分系统及方法。
背景技术
无人机评分,目前主要是基于人工来完成,即无人机比赛的过程中,通过裁判现场评分的方式。传统基于裁判现场打分的方式,对于比较精细的无人机比赛,容易出现误差,且赛后无法回放检查,难以取证,有时很难保证完全公正公平。
现如今检验飞行员对无人机的掌控能力的考试、竞赛中,“8”字飞行几乎是必考科目。“8”字飞行科目的规则一般是由考试主办方布置场地、“8”字跑道,飞行员须以“8”字跑道为基准,视距内控制无人机在跑道垂直的上空,以固定高度、既定路线飞完一圈。计分规则为该选手操控的无人机在水平方向上偏离跑道的次数、时间,以及飞行高度超出设定范围的次数、时间扣分。最终得分以四名裁判分别站在“8”字跑道四角以肉眼观察无人机相对“8”字跑道的位置,给出各自的打分结果,并求平均数。
现有打分方式的缺陷在于无人机以一定高度飞行,飞行轨迹与地面“8”字跑道并不重合,裁判以肉眼观察打分的结果极大程度上受裁判个人的操控水平、经验丰富程度影响,主观程度高,且不具有复核的可能性,对于选手的成绩并不能做出准确的判断,一定程度上有失公平,尤其是在选手水平相近的情况下。
行业内有人采用在无人机本体上固定激光发射器垂直向下射向地面,以激光在“8”字跑道上的光点作为无人机的参考位置来打分。此种方法是解决了无人机相对“8”字跑道的视差问题,使裁判计分更直观方便,但却忽视了无人机在空中的飞行姿态对机身上固定的激光的影响,在无人机以倾斜的姿态转弯时,无人机此时在“8”字跑道的正上方,激光光点位置却向外偏移,导致了计分的误差,从而影响了结果的准确性,这一点是这种方法无法避免的。
现有技术中,公开号为CN109045661A,中国发明专利于2018年12月21日公开了一种针对无人机飞行运动自动进行规则裁判的方法,包括,采用红外感应技术设置多点感应过门/过标信号系统的步骤;自动记录竞赛中无人机的违规记录的步骤;根据违规记录,依据设定规则进行记分的步骤;根据记分结果实时显示成绩的步骤。该方法是通过设置红外感应进行打分,无法进行回访、查证。
发明内容
本发明为克服上述现有技术中无人机的比赛和考试评分不够准确,过程繁琐不够智能的缺陷,提供一种基于图像识别的无人机自动评分系统及方法。
本发明的首要目的是为解决上述技术问题,本发明的技术方案如下:
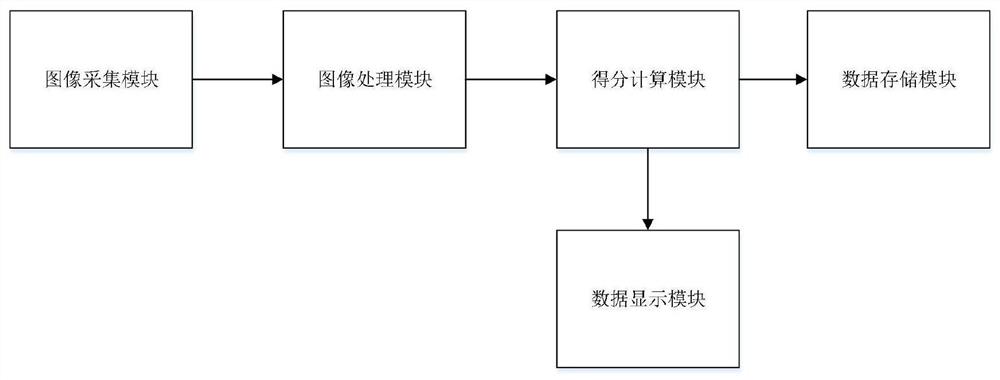
本发明第一方面提供了一种基于图像识别的无人机自动评分系统,包括图像采集模块、图像处理模块、得分计算模块、数据显示模块、数据存储模块,
所述图像采集模块用于获取无人机飞行中实时拍摄的图像;
所述图像处理模块用于对实时拍摄的图像进行图像处理提取赛道信息,
所述得分计算模块利用赛道信息和预设的无人机标定文件解算出无人机的高度和相对于赛道的位置并给出无人机得分;
所述数据显示模块用于显示得分结果;
所述数据存储模块用于保存无人机的历史评分记录。
进一步地,所述赛道信息包括:赛道的RGB颜色信息、赛道的形状信息、赛道的像素宽度。
进一步地,所述图像采集模块获取的无人机飞行中实时拍摄的图像通过无线传输的方式发送至图像处理模块。
进一步地,所述图像采集模块获取的无人机飞行中实时拍摄的图像可以同步存储在无人机的机身存储卡中。
进一步地,所述数据显示模块包括:得分记录显示单元、图像显示单元、实时得分及失分原因显示单元,用户设置单元。
进一步地,所述用户设置单元能够选取任意时段的图像进行无人机的评分。
本发明第二方面提供了一种基于图像识别的无人机自动评分方法,包括以下步骤:
S1:获取无人机飞行中实时拍摄的图像并发送至图像处理模块;
S2:图像处理模块提取图像中赛道信息,并将赛道信息发送至得分计算模块;
S3:得分计算模块根据赛道信息解算出无人机的高度和无人机相对赛道的位置信息,并根据得分规则给出无人机得分;
S4:得分计算模块将得分结果发送分别发送至数据显示模块和数据存储模块。
进一步地,步骤S2中所述图像处理模块提取图像中赛道信息具包括:
根据赛道的RGB颜色信息和赛道的形状信息提取出赛道,然后对提取的赛道进行图像分割计算出赛道的像素宽度。
进一步地,得分结果包括:得分数据和失分原因。
进一步地,得分计算模块根据赛道信息解算出无人机的高度具体过程为:所述得分计算模块利用赛道的像素宽度信息和预设的无人机标定文件计算出无人机的高度。
与现有技术相比,本发明技术方案的有益效果是:
本发明通过图像采集模块、图像处理模块、得分计算模块、数据显示模块、数据存储模块构建了基于图像识别的无人机自动评分系统,克服传统人工评分不准确的缺陷,并且能够回放查证,简化了操作流程,提高了评分效率。
附图说明
图1为本发明一种基于图像识别的无人机自动评分系统框图。
图2为本发明一种基于图像识别的无人机自动评分方法流程图。
具体实施方式
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
实施例1
如图1所示,一种基于图像识别的无人机自动评分系统,包括图像采集模块、图像处理模块、得分计算模块、数据显示模块、数据存储模块,
所述图像采集模块用于获取无人机飞行中实时拍摄的图像;
所述图像处理模块用于对实时拍摄的图像进行图像处理提取赛道信息,
所述得分计算模块利用赛道信息和预设的无人机标定文件解算出无人机的高度和相对于赛道的位置并给出无人机得分;
所述数据显示模块用于显示得分结果;
所述数据存储模块用于保存无人机的历史评分记录。
在一个具体的实施中,所述图像采集模块可以为带有无线传输模块的高清摄像头,所述图像采集模块设置在无人机上,获取了无人机飞行中实时拍摄的图像后可以通过无线传输的方式发送至图像处理模块,也可以同步存储在无人机的机身存储卡中,等飞行完毕时,可以通过存储卡离线获取图像。
进一步地,所述赛道信息包括:赛道的RGB颜色信息、赛道的形状信息、赛道的像素宽度。
在一个具体的实施例中,图像处理模块可以根据赛道的RGB颜色信息、赛道的形状信息进行赛道的提取,提取出赛道后可以先节能性图像分割然后计算出赛道的像素宽度。
进一步地,所述图像采集模块获取的无人机飞行中实时拍摄的图像进一步地,所述数据显示模块包括:得分记录显示单元、图像显示单元、实时得分及失分原因显示单元,用户设置单元。
在一个具体的实施例中,所述得分记录显示单元可用于显示得分记录,所述得分记录可以包括若干条、图像显示单元用于显示图像采集模块采集的图像、实时得分及失分原因显示单元则用于显示实时得分及失分原因,用户通过用户设置单元可以选取任意时段的图像进行无人机的评分。
如图2所示,本发明第二方面提供了一种基于图像识别的无人机自动评分方法,包括以下步骤:
S1:获取无人机飞行中实时拍摄的图像并发送至图像处理模块;
S2:图像处理模块提取图像中赛道信息,并将赛道信息发送至得分计算模块;
S3:得分计算模块根据赛道信息解算出无人机的高度和无人机相对赛道的位置信息,并根据得分规则给出无人机得分;
S4:得分计算模块将得分结果发送分别发送至数据显示模块和数据存储模块。
进一步地,步骤S2中所述图像处理模块提取图像中赛道信息具包括:
根据赛道的RGB颜色信息和赛道的形状信息提取出赛道,然后对提取的赛道进行图像分割计算出赛道的像素宽度。
进一步地,得分结果包括:得分数据和失分原因。
进一步地,得分计算模块根据赛道信息解算出无人机的高度具体过程为:所述得分计算模块利用赛道的像素宽度信息和预设的无人机标定文件计算出无人机的高度。
相同或相似的标号对应相同或相似的部件;
附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制;
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 一种基于图像识别的无人机自动评分系统及方法
- 一种基于图像识别与UWB定位融合的输电线路巡检无人机精确定位系统及方法