用于电动机内转子定位的系统和方法
文献发布时间:2023-06-19 10:14:56
技术领域
本申请要求于2018年7月27日提交的美国临时专利申请序列号62/711,107和于2019年7月26日提交的美国实用新型专利申请序列号16/522,838的权益,其内容通过引用整体并入本文。
技术领域
本发明总体上涉及一种用于控制电动机的系统和方法。更具体地讲,本发明涉及一种用于控制电动机内定子绕组中的电流以控制转子在电动机内位置的系统和方法。
背景技术
电动机通常包括转子,该转子通过与支撑定子绕组的定子磁极的电磁相互作用而绕驱动轴旋转,定子磁极由电流激励。
传统的电动机包括支撑在转子主轴上的转子,该转子主轴被安装在主轴轴承上,该主轴轴承将转子保持在相对于定子磁极居中的径向位置。主轴轴承必须足够坚固以承受施加到转子上的径向和扭转载荷。这种主轴轴承容易磨损,并且如果主轴轴承磨损或由于其他方式损坏,则会导致电动机故障。主轴轴承还增加了传统电动机的重量。
发明内容
本发明提供了一种用于控制电动机的系统。电动机包括可绕驱动轴旋转的转子和定子,定子包括多个绕中心轴彼此径向间隔开的定子磁极。该系统包括:控制器,其被配置为监测转子相对于定子磁极的径向位置;以及电动机驱动器,其被配置为向多个定子绕组中的每一个提供交流电流以控制转子绕驱动轴旋转。控制器被配置为使电动机驱动器在一个或多个定子绕组中提供电流,以控制转子的径向位置。
本发明还提供了一种用于控制电动机转子的径向位置的方法。这种方法包括控制向电动机的定子中的多个定子绕组施加电流,以控制转子绕驱动轴的旋转;测量转子相对于定子中心轴的径向位置;以及在所述多个定子绕组的一个或多个中提供电流,以向所述转子施加净径向力,并使所述转子相对于所述中心轴径向和横向移动。
附图说明
本发明设计的更多细节、特征和优点从以下参考附图对实施方式的描述中得到。
图1A是处于第一位置的示例电动机的侧剖视图;
图1B是处于第二位置的示例电动机的侧剖视图;
图2是符合本发明的一个方面的系统的原理框图;和
图3是列出符合本发明的方法的示例步骤的流程图。
具体实施方式
重复特征在图中用相同的参考数字标记,其中公开了用于控制电动机22的系统20的示例实施方式。在一些实施方式中,电动机22用作牵引电动机,用于驱动轮式车辆,例如汽车或卡车。更具体地讲,在一些实施方式中,电动机22被设置在轮式车辆的车轮内或车轮附近。这种轮端电动机应用可以使电动机22经受强大的力(例如,由凸起和其它不规则地形产生的力)。这种轮端电动机的应用可以受益于簧下质量的减小,这是由于缩小或取消了传统电动机中使用的主轴轴承而导致的。
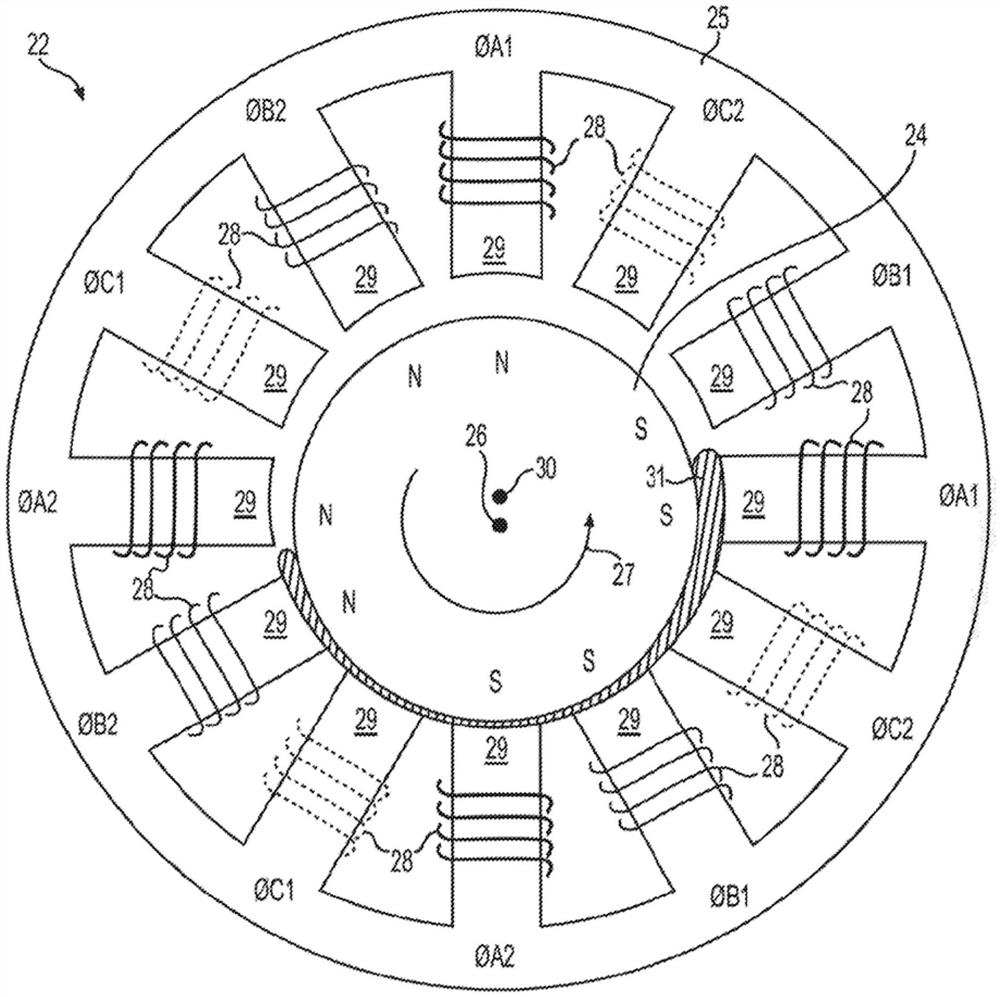
图1A示出了电动机22,其包括处于停放位置的转子24,与定子25接触。图1B示出了电动机22,其中转子24在定子25内居中,转子24的驱动轴26覆盖定子25的中心轴30并与定子25的中心轴30共线。
更具体地讲,如图1A和1B所示,转子24可绕驱动轴26旋转,如旋转箭头27所示。在一些(未示出的)实施方式中,转子24可耦合至电动机输出轴以向负载提供扭矩,例如以使车辆的车轮旋转。定子25具有缠绕在定子磁极29上的多个定子绕组28,定子磁极29绕平行于驱动轴26的中心轴30彼此径向间隔开。图1A和1B示出了包括十二个定子磁极29的特定实施方式,每个定子磁极29具有与三个电相(A,B,C)之一相关联的定子绕组28。然而,电动机22可以具有不同数量的定子磁极29和/或不同数量和/或配置的电相(A,B,C)。在一些实施方式中,如图1A和1B所示,定子绕组28是通过将导线缠绕在每个定子磁极29上而形成的。然而,定子绕组28可以采用其它形式,例如工字钉型或发夹型条形绕组。在一些实施方式中,如图1A和1B所示,每个定子绕组28与单个定子磁极29相关联。然而,每个定子绕组28可以可操作地耦合到两个或多个定子磁极29。例如,每个定子绕组28可以缠绕在两个或多个定子磁极29上。此外,在一些实施方式中,两个或更多个定子绕组28可以缠绕在一个定子磁极29上。
在一般情况下,当电动机22运行时,转子24具有6个运动自由度,3个平移度(X,Y,Z)和3个角度("俯仰,偏航,滚动")。绕驱动轴26旋转的这些角度之一,是电动机22的正常操作模式。其它5个自由度需要以某种形式控制,以使电动机安全有效地运行。在上述示例中,转子24相对于定子25的平移运动是通过抵消作用在转子24上的其它力的不平衡磁力来控制的。通过使用定子25的适当的磁分段,可以产生力来控制转子24的所有6个自由度。
通过使用来自定子25的不平衡磁力来控制转子24的位置,电动机22可以设置有比传统电动机设计中所需的更小的主轴轴承,以承受给定应用的设计载荷。在一些实施方式中,电动机22可以不使用任何传统的主轴轴承,而是仅依靠来自定子25的不平衡磁力来控制转子24的位置并承受给定应用的设计载荷。
在一些实施方式中,如图1A和1B所示,一个或多个定子绕组28被设置在转子24的周围和径向外侧。换句话说,定子磁极29被设置在转子24的周围和径向外侧。这种结构可被称为内转子电动机。在一些实施方式中(图中未示出),一个或多个定子绕组28被设置在转子24内,转子24绕定子绕组28径向向外延伸。换句话说,定子磁极29可以从转子24径向向内设置,并且转子24环形地绕定子磁极29。这种结构可被称为外转子电动机。
在一些实施方式中,如图1A和1B所示,转子24支撑在一层润滑液31上,例如油。润滑液31可以由石油基和/或合成油组成,并且可以包括添加剂,例如腐蚀抑制剂,粘度稳定剂,和/或用于保持比热容。在转子24支撑在润滑液31上的情况下,转子24可以通过由定子绕组28产生的电磁力移动,以便在转子24和定子磁极29之间提供间隙空间,以供润滑液31占据。在一些实施方式中,在转子24开始旋转之前,转子24可以移动来为润滑液31提供间隙空间。
如图2的原理框图所示,系统20包括控制器32,该控制器被配置用来监测转子24相对于定子磁极29的位置。例如,在一些实施方式中,控制器32监测转子24的径向位置,和/或驱动轴26相对于中心轴30的位置。在一些实施方式中,控制器32被配置用来监测定子绕组28的一个或多个电特性,以便确定转子24相对于其的径向位置。一个或多个电特性可以包括例如电阻或电感。例如,当转子24径向移动靠近定子磁极29中的一个时,该定子磁极29可能会减小磁阻。然后,控制器32可以检测到这种减小的电感,作为定子绕组28的或与定子磁极29中的一个相关联的绕组28的一个或多个电特性的变化。
在一些实施方式中,当转子24绕驱动轴26旋转时,控制器32还监测转子24的转子角度34。在图1B中示出了转子角度示例34。在每个转子24和定子25上的示例径向位置之间测量转子角度34。为此目的,可以使用转子角度检测器36,该转子角度检测器可以是独立的设备,例如旋转编码器,磁阻器或电位器。可替换地或附加地,控制器32可以被配置为基于定子绕组28的一个或多个电特性,例如在一个或多个定子绕组28中感应的电流的频率和相位,和/或通过影响定子绕组28中的电压和/或电流的定子绕组28的阻抗的变化,来确定转子24的转子角度34。类似地,速度传感器40可以监测转子24的旋转速度,该旋转速度可以以每单位时间的角度单位表示或者以每单位时间的旋转数表示,并且其还可以包括旋转方向(例如,顺时针/逆时针或正向/反向),该旋转方向可以报告为例如旋转速度所用单位的正或负方向,也可以报告为单独的标记或Boolian值。速度传感器40可以将速度信号41传递到控制器32,以指示用于调节转子24位置的转子速度。
电动机驱动器42被配置为向每个定子绕组28提供交流或直流电流,用于控制转子24绕驱动轴26旋转,以及用于使用电动机22执行机械工作,例如用于加速车辆。电动机驱动器42可以是变频设备,其使用电力电子开关来提供在不同电压和/或频率范围内的交流电流,以用各种不同速度操作电动机22。电动机驱动器42可以被配置为向电动机22提供单相或三相位电流。控制器32可以被配置为使电动机驱动器42提供一个或多个定子绕组28中的电流的相位电流调节,以使转子24在垂直于驱动轴的径向方向上移动。
控制器32被配置为使转子24被控制到相对于定子25的预定位置。预定位置可以包括以中心轴30为中心的转子24。换句话说,控制器32可以使转子24在定子绕组28内居中,其中驱动轴26覆盖中心轴30并与中心轴30共线。这可以在转子24开始转动之前完成,并且可以在转子24绕驱动轴26转动时保持。这样,在运行电动机22的同时,能够在转子24和定子绕组28之间保持足够的间隙。在另一个实例中,预定位置可以包括转子24与定子25相邻或接触。转子24与定子25相邻或接触的一个例子是图1A所示的转子24的停放位置。在一些实施方式中,控制器32被配置为以预定的速度和/或加速度将转子24移动到期望的位置,以防止或最小化可能由于转子24与定子25碰撞而导致的损坏。
根据本发明的一个方面,位置传感器38测量转子24相对于定子绕组28的径向位置。换句话说,位置传感器38测量驱动轴26相对于中心轴30的位置。在一些实施方式中,位置传感器38独立于定子绕组28工作。位置传感器38可以采用几种不同形式中的一种或多种。例如,霍尔效应传感器可用于检测安装在转子24上的磁体的接近程度。差分霍尔效应传感器装置可用于检测安装在转子24上的一个或多个磁体的接近程度,使其拒绝外部磁场的影响,拒绝霍尔效应传感器性能的变化和/或补偿安装在转子24上的一个或多个磁体的变化或差异。类似地,可以使用一系列霍尔效应传感器以更高的精度实现这些目标。
在其它实施方式中,位置传感器38包括一个或多个定子绕组28,允许通过测量一个或多个定子绕组28的一个或多个电特性来确定转子24的径向位置。例如,定子绕组28的复阻抗可以响应转子24相对于定子磁极29或与该定子绕组28相关联的磁极的位置而改变。这种对转子24的位置的感测可以使用诸如最大似然估计器或扩展卡尔曼滤波器之类的最优估计器来实现。此外,在转子24是实心或大致刚性结构的情况下,当转子-定子间隙在转子24的一侧闭合时,转子-定子间隙将在转子24的另一侧打开相应的量。在转子24的相对侧上的测量结果的组合可以用于在独立的传感器装置和/或阻抗方法中降低位置传感器38中的噪声,所述独立的传感器装置和/或阻抗方法用于确定转子24的径向位置。
在图2的框图中,控制器32被配置为使用各种信息源来执行转子调节计算,来计算使用转子角度34的基于角度的调节和与转子角度34无关的非基于角度的调节。所述基于角度的调节可以仅基于所测量的转子位移或者具有前馈项,该前馈项是所测量的转子速度或先前识别的定子磁场强度的函数。
电动机22可以包括任何类型的电动机。例如,在一些实施方式中,电动机22是永磁型电动机,其中转子24包括用于与定子绕组28产生的磁场相互作用的一个或多个永磁体。在其它实施方式中,电动机22是感应电动机,例如鼠笼型设计,其中通过来自定子绕组28的磁场的电磁感应在转子24中感应电流。在其它实施方式中,电动机22是磁阻型电动机,其中在转子24的铁磁材料中感应出非永久磁极。
在图1A和1B所示的示例实施方式中,电动机22是三相电动机,其被配置为被提供有三相电源。在一些实施方式中,如图2所示,三相电源包括三相电动机驱动器42。电动机22可以包括与三相电源的每个相位所关联的整数个定子绕组28,该三相电源的每个相可以被称为A,B和C。每个定子磁极29用相关联的绕组标识符θA1,θA2,θB1,θB2,θC1,θC2来标记。在图1A和1B所示的示例实施方式中,电动机22是具有12个定子槽的三相电动机,所述定子槽将定子磁极29分隔开,因此,每个相位电流被施加到四个定子绕组28,其中定子绕组28绕定子均匀地间隔开(每三个绕组)。在这种情况下,我们可以将定子绕组28分成四组,每组三个相邻的相绕组,这在定子周围产生四个象限。电动机22的四个象限部分可以用正常的三相位电流激励以产生转子转矩。
在一些实施方式中,定子绕组28中的相位电流可以在每象限的基础上调节,以在转子24上产生净径向力,从而控制转子24的平移径向位置,该位置可以用于例如保持转子24居中。每个单独的定子绕组28中的电流可以独立地调节。与正常的,产生转矩的相位电流相比,这些调节通常是非常小的电流变化,例如相位电流可以通过一个或多个变频电动机驱动中用于三相电动机速度控制的传统算法(例如梯形,正弦波,磁场定向控制)来产生。本发明的转子位置控制方法和/或在转子24上提供净径向力的其它算法或技术可以与这些或其它电动机速度控制算法中的任何一种一起使用。
除了用于创造产生转子角度力的旋转磁场的多相转子电流(例如由传统的变频电动机控制技术提供的多相转子电流)之外,本发明的系统20可以使用转子电流变化来产生磁场分量,该磁场分量在转子24上施加净径向力以控制转子24的径向位置,例如该磁场分量可以被配置为以净径向力(转子相对侧的上的未抵消力)将转子24定心在定子25的内部。这种控制可用于补偿转子24中较小的质量不平衡,这种不平衡可能趋于导致转子24绕其质量中心而不是几何中心旋转。这种控制还可以用于补偿较小的磁场强度不平衡,这种不平衡可能趋于在相对于定子25在径向方向上不均匀地拉动转子24。
可调节定子绕组28中的电流以在转子24上提供净径向力,从而控制转子24相对于定子25的位置。例如,使转子24居中所需的力可以是转子速度,转子质量不平衡,定子磁场强度和转子磁不平衡的函数。这些将速度和定子磁场强度与转子平衡力相关联的参数可以被预先测量,并将其存储在表中,或者可以使用估算技术实时地识别这些参数。这种调节电流可以由两种一般形式中的任一种提供:第一种一般形式是施加净径向力作为调节并且该调节是转子24的角位移或位置的函数,第二种一般形式是施加净径向力但该净径向力不是转子角度34的函数。在任何情况下,调节都可以改变由电动机驱动器42施加到一个或多个定子绕组28的电压,例如,通过增加或降低施加到一个或多个定子绕组28的电压和/或通过改变施加到定子绕组28的电压的时间或相位角。
在第一种一般形式中,调节被配置为向转子24施加的净径向力是转子角度34的函数。这些调节可以校正静态转子质量不平衡,转子磁不平衡或由固定在转子24上的诸如传动装置之类的机械施加到转子24上的振动。
在第二种一般形式中,调节不是转子角度位移的函数。这些调节可以与由外力施加在定子25上的振动有关。例如,在轮端电动机应用中,轮端响应道路中的凸起而进行的上下运动将产生与定子25成固定关系并且与转子的角位置无关的调节。这些调节也可用于解决电动机22和周围机械中的机械振动,润滑液31的动力学和/或其它外力。定子25的外部加速度可以由定子加速度计44测量,并且可以作为加速度信号45传递到控制器32,用于计算要施加到转子24的调节。
这些基于非角度的校正采用"抗噪声"信号的形式,以抵消转子定心位置振动的影响。例如,支撑电动机22的结构中的机械共振可以引起电动机22中的振动,该振动与电动机22的速度和/或转子24的角位置无关。这些结构振动可以通过定心力调节而被衰减和/或抵消,该定心力调节是结构振动的频率和相位的函数。
在计算要施加到转子24的调节时,控制器32还可以考虑定子25内在任何给定时间和/或作为时间的函数的磁力46,以及所述调节将对那些磁力46产生的影响,例如,由磁场塌陷引起的能量扩散。
在一些实施方式中,当转子停止旋转时,系统20可以控制转子24的位置,这可以轻轻地将转子24移动到停放位置,并且可以防止转子24强行撞击一个或多个定子磁极29,例如,在水平方向安装电动机的应用中。
在一些实施方式中,本发明的系统20提供了具有转子24的电动机22,转子24仅支撑在润滑液31上,并且不包括主轴轴承。通过控制转子24的径向位置,系统20可以确保润滑液31保持在电动机运行的所有模式和条件下。这包括启动,高扭矩操作,外部振动/冲击事件中,临界速度,低速和高速。系统20还可以将转子24保持在其相对于定子25的最佳位置。因此,本发明的系统20可以确保润滑液31保持在指定的厚度范围内,并且可以确保转子24保持在定子25的中心。通过确保转子24在操作期间相对于定子25居中,由润滑液31施加的剪切力被最小化。这又使由转子/定子系统形成的滑动轴承的自旋损失或摩擦损失最小化。
对于具有润滑剂支撑的转子24的电动机22,当电动机关闭时,转子24可能已经沉降或停放,使得其与定子25接触。在电动机22的启动期间,理想的情况可能是在旋转转子24之前将转子24相对于定子25重新定心。这种重新定心可以通过润滑液31的支撑和/或由定子绕组28产生的净径向磁力来实现,如上所述。
本发明中所提供的系统20包括具有润滑剂支撑的转子24和动态转子位置控制的电动机22,所述系统可以补偿转子质量不平衡和/或转子磁不平衡,并且可以提供对润滑液31和转子取消停放的控制。与现有设计相比,这种系统20可以提供一些优势。总体而言,润滑剂支撑的电动机可以为剧烈的冲击和振动环境中的应用提供更高的扭矩和更轻的重量。本发明的系统20通过动态控制转子位置加强了这些优势。
如图3的流程图所示,本发明还提供了一种用于控制电动机22的转子24的径向位置的方法100。方法100包括,在步骤102中,通过电动机驱动器42控制对电动机22中的多个定子绕组28施加电流,以控制转子24绕驱动轴26的旋转。该步骤可以通过用于交流电动机驱动器的变频控制的传统方式来执行。
方法100还包括,在步骤104中,测量转子24相对于定子25的中心轴30的径向位置。转子24的径向位置可以是平移位置,其可以表示为包括方向和大小的矢量。转子24的径向位置可以表示为驱动轴26和定子25的中心轴30之间的位置差。该步骤102可以由被配置成将位置信号39传送到控制器32的位置传感器38执行。
方法100还包括,在步骤106中,将位置调节信号48从控制器32传送到电动机驱动器42。位置调节信号48可以与转子24的径向位置成比例,并且可以考虑其它因素,例如转子24在旋转速度和/或在一个或多个平移方向上的速度。位置调节信号还可以考虑电动机的定子磁极29中的磁力,电动机22的外部加速度等。
方法100还包括,在步骤108中,在一个或多个定子绕组28中提供电流,以向转子24施加净径向力,并使转子24径向和横向于中心轴30移动。该电流可以由电动机驱动器42提供,作为上述步骤102所述的为正常旋转提供的电流的调节或差。该电流和相应的定子绕组28由来自控制器32的位置调节信号48确定。
在一些实施方式中,方法100包括,在步骤110中,调节一个或多个定子绕组28中的电流以控制转子24相对于定子25的位置。步骤110可以包括,在子步骤110A中,根据转子角度34调节一个或多个定子绕组28中的电流。例如,该子步骤可用于补偿转子24,或连接到转子24上的不平衡的部分,否则当转子24旋转时,该不平衡的部分可能导致转子24在偏心路径中摆动。可替换地或附加地,步骤110可以包括,在子步骤110B中,根据与转子角度34无关的测量值来调节一个或多个定子绕组28中的电流。所测量的值可用于补偿外力,比如在车辆应用中使用电动机24时,转子24响应道路中的凸起而进行的上下运动。例如,调节可以是来自加速计的加速度信号的函数,所述加速计耦合到电动机24中的定子25。
上述系统,方法和/或过程及其步骤可以用硬件,软件或适于特定应用的硬件和软件的任意组合来实现。硬件可包括通用计算机和/或专用计算设备或特定计算设备或特定计算设备的特定方面或组件。该过程可以在一个或多个微处理器,微控制器,嵌入式微控制器,可编程数字信号处理器或其它可编程设备中连同内部和/或外部存储器一起实现。所述过程也可以,或可替代地,体现于专用集成电路,可编程门阵列,可编程阵列逻辑或可被配置为处理电子信号的任何其它设备或设备组合中。还将意识到,一个或多个过程可以被实现为能够在机器可读介质上执行的计算机可执行代码。
计算机可执行代码可以使用诸如C的结构化编程语言,诸如C++的面向对象的编程语言或任何其它高级或低级编程语言(包括汇编语言,硬件描述语言和数据库编程语言和技术)来创建,所述编程语言可以被存储,编译或解释,为了在上述设备之一以及处理器处理器体系结构的异构组合,或不同硬件和软件的组合,或能够执行程序指令的任何其它机器上运行。
因此,在一个方面,上述每一种方法及其组合可体现在计算机可执行代码中,所述计算机可执行代码在一个或多个计算设备上执行时执行所体现方法的步骤。在另一方面,所述方法可以体现在执行其步骤的系统中,并且可以以多种方式跨设备分布,或者所有功能都可以集成到专用的,独立的设备或其它硬件中。在另一方面,用于执行与上述过程相关联的步骤的设备可以包括上述硬件和/或软件中的任何一个。所有这些排列和组合都落入本发明的范围内。
出于说明和描述的目的,已经提供了对实施方式的上述描述。其并非旨在穷举或限制本发明。特定实施方式的各个元件或特征通常不限于该特定实施方式,而是在适用的情况下可以互换,并且即使没有具体示出或描述也可以用于所选实施方式中。同一事物也可以以多种方式变化。这样的变化不应被认为偏离本发明,并且所有这样的修改旨在被包括在本发明的范围内。
- 用于电动机内转子定位的系统和方法
- 电动机转子组装定位系统、方法、装置、设备及介质