用于针对移动的工艺套件测量侵蚀并校准位置的方法和装置
文献发布时间:2023-06-19 10:14:56
本申请要求于2019年8月20日提交的美国非临时申请第16/545,827号的优先权,该美国非临时申请要求于2018年9月4日提交的美国临时申请第62/726,892号的权益,这些美国申请的整体内容由此以引用方式并入本文中。
背景技术
实施例与半导体制造领域相关,并且具体而言与用于测量移动的工艺套件的位置和侵蚀的方法和装置相关。
背景技术
在基板(诸如,半导体晶片)的处理中,基板被放置在处理腔室中的支撑表面(例如,静电吸盘(ESC))上。一般而言,工艺套件被放置在支撑表面周围以在基板处理期间提供所需的处理特性。例如,工艺套件可以用来帮助在等离子体腔室中对等离子体塑形,以跨晶片提供更均匀的工艺。如此,通常需要控制工艺套件的顶表面相对于正被处理的基板的顶表面的定位,以实现所需的处理结果。
在安装工艺套件之后,可以实现各种测试(诸如,蚀刻速率测试或颗粒测试)以确认工艺套件相对于经处理的基板适当地定位。然而,此类测试是昂贵的,并且可能要花数小时来完成。并且,工艺套件可能在基板的处理期间被侵蚀。如此,可能需要调整工艺套件以重设基板表面与工艺套件的顶表面之间的关系。目前,直到在经处理的基板上发现可观察的缺陷之后才适当地界定侵蚀速率并且可作出调整。
发明内容
本文中所公开的实施例包括一种校准处理腔室的方法。在实施例中,该方法包括以下步骤:将传感器晶片放置到处理腔室中的支撑表面上,其中在Z方向上能移位的工艺套件定位在支撑表面周围。在实施例中,该方法进一步包括以下步骤:用传感器晶片的边缘表面上的传感器测量传感器晶片与工艺套件之间的第一间隙距离。在实施例中,该方法进一步包括以下步骤:使工艺套件在Z方向上移位。在实施例中,该方法进一步包括以下步骤:测量传感器晶片与工艺套件之间的额外间隙距离。
本文中所公开的实施例包括一种用于测量工艺套件的侵蚀的方法。在实施例中,该方法包括以下步骤:将传感器晶片放置在处理工具中的支撑表面上。在实施例中,该方法进一步包括以下步骤:使用传感器晶片上的传感器将环绕支撑表面的工艺套件的顶表面与传感器晶片的顶表面对准。在实施例中,该方法进一步包括以下步骤:从支撑表面移除传感器晶片。在实施例中,该方法进一步包括以下步骤:在处理工具中处理一个或多个器件基板。在实施例中,该方法进一步包括以下步骤:将传感器晶片放置在支撑表面上。在实施例中,该方法进一步包括以下步骤:用传感器晶片的边缘表面上的传感器测量传感器晶片与工艺套件之间的间隙距离。在实施例中,该方法进一步包括以下步骤:使工艺套件在Z方向上移位。在实施例中,该方法进一步包括以下步骤:再次测量传感器晶片与工艺套件之间的间隙距离。在实施例中,该方法进一步包括以下步骤:重复使工艺套件移位以及测量间隙距离的操作,直到连续的间隙距离测量值彼此相等为止。
本文中所公开的实施例包括一种传感器晶片。在实施例中,该传感器晶片包括:基板,具有第一表面以及与第一表面相对的第二表面,第一表面和第二表面通过边缘表面连接。在实施例中,该传感器晶片进一步包括:多个传感器,位于基板的周边周围,其中这些传感器中的每一个是面向外部的位置传感器。
附图说明
图1A是根据实施例的具有边缘传感器的传感器晶片的平面图。
图1B是根据实施例的具有边缘传感器的传感器晶片的立体图。
图2A是根据实施例的具有边缘传感器的传感器晶片的部分横截面图。
图2B是根据实施例的具有边缘传感器和电场防护挡板的传感器晶片的部分横截面图。
图2C是根据实施例的具有边缘传感器和顶表面凹口的传感器晶片的部分横截面图。
图2D是根据实施例的具有边缘传感器的传感器晶片的部分横截面图,该边缘传感器形成在传感器晶片的顶表面上方。
图3A是根据实施例的传感器晶片的横截面图,该传感器晶片测量传感器晶片与完全凹陷的工艺套件之间的间隙距离。
图3B是根据实施例的图3A的传感器晶片和工艺套件在工艺套件通过升降销竖直移位第一距离之后的横截面图。
图3C是根据实施例的图3B的传感器晶片和工艺套件在工艺套件竖直移位第二距离使得工艺套件的顶表面和传感器晶片的顶表面实质共面之后的横截面图。
图4是图示根据实施例的相对于工艺套件的竖直移位所测量到的间隙距离的图表。
图5是根据实施例的传感器晶片和工艺套件的横截面图,该传感器晶片在传感器晶片的顶表面上方具有边缘传感器,该工艺套件提升于传感器晶片上方。
图6是根据实施例的用于相对于传感器晶片定位工艺套件的过程的过程流程图。
图7是根据实施例的用于针对给定的处理操作确定工艺套件的侵蚀速率的过程的过程流程图。
图8图示根据实施例的示例性计算机系统的框图,该计算机系统可以与包括测量传感器晶片相对于工艺套件的关系的步骤的过程结合使用。
具体实施方式
根据各种实施例描述了包括具有边缘传感器的传感器晶片的系统以及使用此类传感器晶片来测量工艺套件相对于传感器晶片的定位的方法。在以下描述中,阐述了许多具体细节以提供对实施例的透彻理解。对本领域中的技术人员将显而易见的是,可在没有这些具体细节的情况下实行实施例。在其他的实例中,不详细描述众所周知的方面以免不必要地使实施例含糊。并且,要了解到,附图中所示的各种实施例是说明性的表示且不一定是按比例绘制的。
如上所述,为了确认工艺套件相对于基板适当地定位,在处理工具中处理多个基板以监测蚀刻速率和/或运行颗粒测试。仅在处理了许多基板之后,才可能确认工艺套件被适当地对准以提供所需的处理结果。该过程需要处理工具数小时的停机时间,并且是昂贵的。
因此,本文中所公开的实施例包括能够直接测量工艺套件的传感器晶片。在实施例中,可以使用传感器晶片来确认工艺套件的顶表面与传感器晶片的顶表面实质共面。因为传感器晶片可以具有与腔室中所处理的晶片实质相同的形状因子,所以工艺套件相对于传感器晶片的测量值提供了生产晶片相对于工艺套件的位置的足够接近的近似值。如此,可以在抽空处理工具之后实现单个测试程序,以确认工艺套件相对于生产晶片定位到所需的容差。因此,减少了校准处理工具的时间,并且可以增加处理工具的吞吐容量。
因为工艺套件被用于制造半导体器件,所以处理环境可能造成工艺套件的侵蚀,并且工艺套件与器件晶片之间的所需关系可能漂移。因此,实施例包括也可以用来检测工艺套件的侵蚀速率的传感器晶片。在使用传感器晶片来确定侵蚀速率之后,可以随后调整工艺套件以考虑预测的侵蚀而不需要重新校准处理工具。如此,可以增加处理工具的吞吐容量。
现在参照图1A,根据实施例示出了具有多个边缘传感器区域135
在所图示的实施例中,示出了三个边缘传感器区域135。然而,要理解到,可以使用一个或多个边缘传感器区域135以确定工艺套件的顶表面何时与传感器晶片110的顶表面实质共面,如下文将更详细地所描述。
在实施例中,可以用迹线137将边缘传感器区域135中的每一个通信耦接到传感器晶片110上的计算模块138。在实施例中,计算模块138可以包括以下项目中的一个或多个:电源132(例如,电池)、处理器/存储器134(例如,用于实现和/或存储用边缘传感器区域135进行的测量的电路系统、存储器等等)、及无线通信模块133(例如蓝芽、WiFi等等)。在实施例中,可以将计算模块138嵌入在传感器晶片110中。此外,虽然示出为在传感器晶片110的中央,但要理解,计算模块138可以位于传感器晶片110中任何合宜的位置处。
现在参照图1B,根据实施例示出了强调示例性边缘传感器区域135的细节的传感器晶片110的立体图。在实施例中,传感器晶片110可以包括第一表面111(例如,顶表面)、第二表面113(例如,底表面)、以及将第一表面111连接到第二表面113的边缘表面112。在实施例中,边缘传感器区域135可以沿着边缘表面112形成。
在特定实施例中,边缘传感器区域135可以包括探针141。探针141(即,每个边缘传感器区域中的探针)可以是自参考电容式探针。也就是说,供应到第一边缘传感器区域135中的第一探针141的电流的输出相位可以相对于供应到相邻的第二边缘传感器区域135中的第二探针141的电流的输出相位偏移180度。如此,可以进行从边缘表面112到工艺套件(未示出)的表面的距离测量,而不需要将工艺套件接地。在所图示的实施例中,边缘传感器区域135被示为具有单个探针。然而,在一些实施例中,每个边缘传感器区域135均可以包括多于一个的探针141。虽然在本文中特别指代自参考电容式传感器,但要理解,本文中所公开的实施例包括任何合适的传感器技术(例如激光传感器、光学传感器等等)。
现在参照图2A-2D,根据各种实施例示出了传感器晶片210的示例性部分横截面图。在图2A中,部分横截面图描绘了与边缘表面212实质共面的传感器区域235。在实施例中,传感器区域235从边缘表面212发射电场249,使得传感器可以测量边缘表面212与工艺套件的表面之间的间隙。
现在参照图2B,根据实施例示出了具有电场防护挡板247的传感器晶片210的部分横截面图。在实施例中,电场防护挡板247可以是形成于传感器晶片210的底表面213与边缘传感器区域235之间的导电层。可以通过电场防护挡板247修改边缘传感器区域235的电场249。具体而言,电场防护挡板247可以修改边缘传感器区域235的电场249,使得该电场从边缘表面212朝向工艺套件侧向延伸出去。因此,电场防护挡板247防止边缘传感器区域235中的传感器检测传感器晶片210下方的可能提供错误读数的物体。
现在参照图2C,根据实施例示出了具有顶表面凹口248的传感器晶片210的部分横截面图。在实施例中,可以将顶表面凹口248形成到紧邻传感器区域235的第一表面211中。可以将顶表面凹口248制作为防止传感器区域235的传感器感测顶表面211以及提供错误的读数。在实施例中,顶表面凹口248可以往回延伸距离R。例如,距离R可以大约等于边缘感测区域235的最大感测距离。在实施例中,距离R可以是2.0mm或更小、或1.0mm或更小。
现在参照图2D,根据实施例示出了具有传感器区域235的传感器晶片210的部分横截面图,该传感器区域形成在传感器晶片210的第一表面211上方。将传感器区域235定位在传感器晶片210上方对于需要将工艺套件的顶表面定位在器件晶片的顶表面上方的时候可以是有益的。在实施例中,传感器区域235可以具有厚度T,该厚度不显著地变更传感器晶片210的形状因子。例如,厚度T可以小于5mm、小于2mm、小于1mm、或小于0.5mm。因此,传感器晶片210可以仍然穿过处理工具中的任何装载锁气室。
现在参照图3A-3C,一系列的横截面图描绘用于校准处理工具使得工艺套件360的顶表面361与传感器晶片310的第一(即,顶)表面311实质共面的过程。
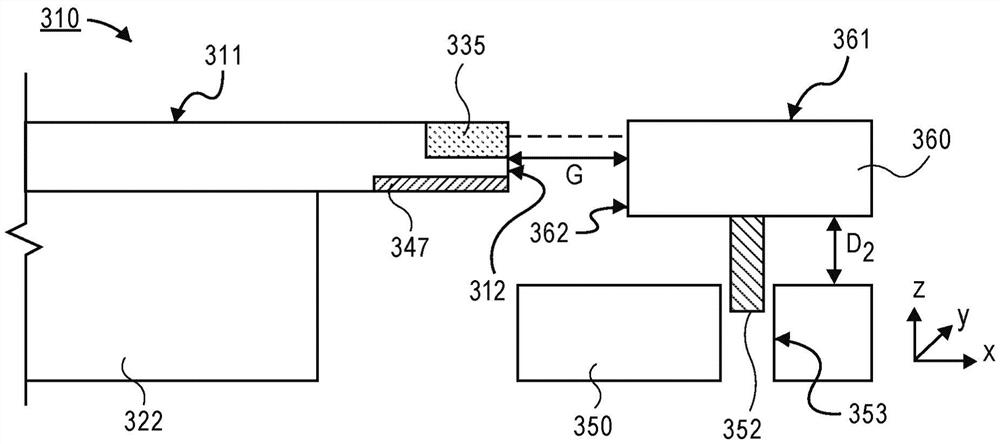
现在参照图3A,根据实施例示出了传感器晶片310的由支撑表面322所支撑的一部分的横截面图。在实施例中,传感器晶片310可以是具有一个或多个边缘传感器区域335的任何传感器晶片。例如,可以根据各种实施例使用上文针对图1A-1D所描述的传感器晶片中的任一者。在图3A中所图示的特定实施例中,传感器晶片310包括边缘传感器区域335和电场防护挡板347,然而实施例不限于此类配置。在实施例中,传感器晶片310可以具有与要在处理工具中处理的晶片的形状因子实质类似的形状因子。例如,传感器晶片310可以具有300mm的直径及小于1mm的厚度。在实施例中,支撑表面322可以是静电吸盘(ESC)或用于支撑和固定传感器晶片310的任何其他合适的表面。
在实施例中,支撑表面322可以被工艺套件支撑物350环绕,工艺套件360搁置在该工艺套件支撑物上。支撑表面322可以包括设置到工艺套件支撑物350中的开口353中的多个升降销352。在实施例中,升降销352可以在工艺套件360下方。在用致动器(未示出)延伸升降销352时,工艺套件在Z方向上移位。
在图3A中,升降销352完全回缩,使得工艺套件完全搁置在工艺套件支撑物表面350上。在此类实施例中,工艺套件360的顶表面361可以在传感器晶片310的顶表面311下方。因此,在边缘传感器区域335向外朝向工艺套件360感测时,边缘传感器区域检测工艺套件360的顶表面361上的第一点371。在实施例中,第一点371可以与工艺套件360的内表面362相距第一距离V
现在参照图3B,根据实施例示出了在延伸升降销且工艺套件360在Z方向上升起距离D
现在参照图3C,根据实施例示出了在工艺套件在Z方向上移位第二距离D
例如,图4示出相对于Z方向上的工艺套件位移的间隙测量值的图表。如所示,在工艺套件360处于D
在工艺套件的顶表面需要在器件晶片的顶表面上方时,可以将边缘传感器区域放置在传感器晶片的第一(即,顶)表面上方。此类实施例示于图5中。如所示,传感器区域535被放置在传感器晶片510的第一表面511上方。因此,直到工艺套件560移位使得工艺套件560的顶表面561在传感器晶片的顶表面511上方的距离D,传感器区域535才“看见”工艺套件560的内表面562。
现在参照图6,根据实施例示出了用于将工艺套件的顶表面与传感器晶片的顶表面对准的过程680的过程流程图。
在实施例中,过程680可以从操作681开始,该操作包括以下步骤:将传感器晶片放置在支撑表面上,其中可移位的工艺套件环绕该支撑表面。在实施例中,传感器晶片可以是任何传感器晶片,例如本文中所述的包括一个或多个边缘传感器区域的那些传感器晶片。在实施例中,传感器晶片可以具有与处理工具中所处理的晶片实质相同的形状因子。如此,可以用晶片搬运机器人将传感器晶片放置在支撑表面(例如,静电吸盘)上。在实施例中,工艺套件可以搁置在工艺套件支撑物表面上。工艺套件支撑物表面可以包括用于使工艺套件在Z方向上移位的多个升降销。
在实施例中,过程680可以继续进行操作682,该操作包括以下步骤:用传感器晶片的边缘传感器获得传感器晶片与工艺套件之间的第一间隙距离。在实施例中,边缘传感器可以是自参考电容式传感器。在实施例中,工艺套件的顶表面可以在传感器晶片的顶表面下方。如此,可以通过感测沿着工艺套件的顶表面的第一点而不是感测工艺套件的内缘来获得第一间隙距离。
在实施例中,过程680可以继续进行操作683,该操作包括以下步骤:使工艺套件在Z方向上移位一定距离。在实施例中,可以用工艺套件支撑物表面中的升降销使工艺套件在Z方向上移位。
在实施例中,过程680可以继续进行操作684,该操作包括以下步骤:用边缘传感器获得传感器晶片与工艺套件之间的额外间隙距离。
在实施例中,过程680可以继续进行操作685,该操作包括以下步骤:比较最后两个测量到的间隙距离。在其中最后两个测量到的间隙距离不同的实施例中,过程680可以重复操作683-685。例如,过程680可以重复以下操作:使工艺套件在Z方向上移位;获得额外的间隙距离;以及比较最后两个测量到的间隙距离(例如,将第三间隙距离与第二间隙距离进行比较,将第四间隙距离与第三间隙距离进行比较,等等)。在其中最后两个测量到的间隙距离相同的实施例中,过程680可以结束,因为工艺套件的顶表面现在与传感器晶片的顶表面实质共面。
现在参照图7,根据实施例示出了用于确定工艺套件的侵蚀量的过程780的过程流程图。
在实施例中,过程780从操作781开始,该操作包括以下步骤:将传感器晶片放置在支撑表面上,以及使用传感器晶片的边缘传感器来将工艺套件的顶表面与传感器晶片的顶表面对准。用于将工艺套件的顶表面与传感器晶片的顶表面对准的过程可以与上文针对图6所描述的过程680实质类似。
在实施例中,过程780可以继续进行操作782,该操作包括以下步骤:从支撑表面移除传感器晶片。在实施例中,可以用晶片搬运机器人等等移除传感器晶片。
在实施例中,过程780可以继续进行操作783,该操作包括以下步骤:在支撑表面上处理多个晶片。在实施例中,处理该多个晶片的步骤可以包括任何半导体制造工艺。例如,工艺可以包括蚀刻工艺。在实施例中,处理可能造成侵蚀工艺套件。在实施例中,该多个晶片可以包括数十个晶片、数百个晶片、或数千个晶片。
在实施例中,过程780可以继续进行操作784,该操作包括以下步骤:将传感器晶片放置在支撑表面上。在实施例中,传感器晶片可以是操作781中所使用的相同传感器晶片。然而,要理解,也可以在一些实施例中使用不同的传感器晶片。
在实施例中,过程780可以继续进行操作785,该操作包括以下步骤:用传感器晶片的边缘传感器获得传感器晶片与工艺套件之间的第一间隙距离。在实施例中,侵蚀可以使得工艺套件的顶表面在传感器晶片的顶表面下方。因此,第一间隙距离可以感测工艺套件的顶表面而不是工艺套件的内表面。
在实施例中,过程780可以继续进行操作786,该操作包括以下步骤:使工艺套件在Z方向上移位一定距离。在实施例中,可以用工艺套件支撑物表面中的升降销使工艺套件移位。
在实施例中,过程780可以继续进行操作787,该操作包括以下步骤:用边缘传感器获得传感器晶片与工艺套件之间的额外间隙距离。
在实施例中,过程780可以继续进行操作788,该操作包括以下步骤:比较最后两个测量到的间隙距离。在其中最后两个测量到的间隙距离不同的实施例中,过程780可以重复操作786-688。例如,过程780可以重复以下操作:使工艺套件在Z方向上移位;获得额外的间隙距离;以及比较最后两个测量到的间隙距离(例如,将第三间隙距离与第二间隙距离进行比较,将第四间隙距离与第三间隙距离进行比较,等等)。
在其中最后两个测量到的间隙距离相同的实施例中,过程780可以继续进行操作789,该操作包括以下步骤:计算侵蚀速率。在实施例中,可以通过以下步骤来计算侵蚀速率:确定工艺套件在Z方向上的总位移,并且除以在操作783中处理的该多个晶片中的晶片的数量。如此,可以就单位数量的经处理晶片的侵蚀距离来表示侵蚀速率。在额外的实施例中,可以通过以下步骤来计算侵蚀速率:确定工艺套件的总位移,并且除以处理该多个晶片所花费的时间。在此类实施例中,可以将侵蚀速率表示为单位处理分钟的侵蚀速率。
在实施例中,可以将侵蚀速率存储在数据库中以供将来使用。例如,可以存储侵蚀速率,且后续的处理可以自动使工艺套件移位以考虑预期的侵蚀。如此,对传感器晶片的进一步的测量可以不是必要的,并且可以增加处理工具吞吐容量。
现在参照图8,根据实施例图示了处理工具的示例性计算机系统860的框图。在实施例中,可以使用计算机系统860来实现一个或多个过程,诸如,过程680和780。在实施例中,计算机系统860耦接到处理工具且控制处理工具中的处理。计算机系统860可以连接(例如,联网)到网络861(例如,局域网(LAN)、内联网、外联网、或因特网)中的其他机器。计算机系统860可以用客户端-服务器网络环境中的服务器或客户端机器的身份操作,或操作为点对点(或分布式)网络环境中的对等机器。计算机系统860可以是个人计算机(PC)、平板PC、机顶盒(STB)、个人数字助理(PDA)、蜂窝电话、网页设备、服务器、网络路由器、交换器或网桥、或能够执行一组指令(有顺序的或其他方式的指令)的任何机器,该组指令指定要由该机器所采取的动作。进一步地,虽然仅针对计算机系统860图示了单个机器,但术语“机器”也应被视为包括了单独地或联合地执行一组(或多组)指令以执行本文中所描述的方法中的任何一个或多个的任何系列的机器(例如,计算机)。
计算机系统860可以包括具有非暂态机器可读介质的计算机程序产品或软件822,该非暂态机器可读介质具有存储在其上的指令,这些指令可以用来将计算机系统860(或其他电子设备)编程为执行根据实施例的过程。机器可读介质包括用于用可以由机器(例如,计算机)读取的形式来存储或传送信息的任何机制。例如,机器可读(例如,计算机可读)介质包括机器(例如,计算机)可读存储介质(例如,只读存储器(“ROM”)、随机存取存储器(“RAM”)、磁盘存储介质、光学存储介质、闪存设备等等)、机器(例如,计算机)可读传输介质(电气、光学、声学、或其他形式的传播信号(例如,红外线信号、数字信号等等))等等。
在实施例中,计算机系统860包括经由总线830来彼此通信的系统处理器802、主存储器804(例如,只读存储器(ROM)、闪存、动态随机存取存储器(DRAM)(例如,同步DRAM(SDRAM)或Rambus DRAM(RDRAM))等等)、静态存储器806(例如,闪存、静态随机存取存储器(SRAM)等等)、以及次级存储器818(例如,数据存储设备)。
系统处理器802表示一个或多个通用处理设备,诸如,微型系统处理器、中央处理单元等等。更具体而言,系统处理器可以是复杂指令集计算(CISC)微型系统处理器、精简指令集计算(RISC)微型系统处理器、超长指令字(VLIW)微型系统处理器、实现其他指令集的系统处理器、或实现指令集组合的系统处理器。系统处理器802也可以是一个或多个专用处理设备,诸如,应用特定集成电路(ASIC)、现场可编程门阵列(FPGA)、数字信号系统处理器(DSP)、网络系统处理器等等。系统处理器802被配置为执行处理逻辑826以供执行本文中所述的操作。
计算机系统860可以进一步包括系统网络接口设备808以供与其他设备或机器通信。计算机系统860也可以包括视频显示单元810(例如,液晶显示器(LCD)、发光二极管显示器(LED)或阴极射线管(CRT))、字母数字输入设备812(例如,键盘)、光标控制设备814(例如,鼠标)、以及信号生成设备816(例如,扬声器)。
次级存储器818可以包括机器可存取存储介质831(或更具体而言是计算机可读存储介质),在该介质上存储了体现本文中所述的方法或功能中的任何一个或多个的一组或多组指令(例如,软件822)。软件822也可以在由计算机系统860执行该软件期间完全地或至少部分地驻留在主存储器804内和/或系统处理器802内,主存储器804和系统处理器802也构成机器可读存储介质。可以进一步经由系统网络接口设备808在网络861上传送或接收软件822。
虽然机器可存取存储介质831在示例性实施例中被示为单个介质,但也应将术语“机器可读存储介质”视为包括存储该一组或多组指令的单个介质或多个介质(例如,集中式或分布式数据库、和/或相关联的高速缓存和服务器)。也应将术语“机器可读存储介质”视为包括能够存储或编码用于由机器执行的一组指令且使得机器执行方法中的任何一个或多个的任何介质。应该因此将术语“机器可读存储介质”视为包括但不限于固态存储器以及光学和磁介质。
在前述的说明书中,已经描述了具体的示例性实施例。显然,可以在不背离所附权利要求书的范围的情况下对这些实施例作出各种修改。因此,应以说明性意义而非限制性意义来看待说明书和附图。
- 用于针对移动的工艺套件测量侵蚀并校准位置的方法和装置
- 用于测量沿着导向轨道移动的车辆的速度和位置的装置、及其对应的方法和计算机程序产品