一种电磁涡旋雷达同心圆环阵列设计方法
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及一种电磁涡旋雷达同心圆环阵列设计方法,属于雷达技术领域。
背景技术
相较于传统平面电磁波,电磁涡旋波具有螺旋分布的波前相位、特殊的环 形天线方向图、独特的涡旋方位维信息等特点。近几年来,得益于其特殊的物 理特性,电磁涡旋波在无线通信、雷达遥感探测、地形测高等领域受到了广泛 地关注。在雷达领域,电磁涡旋波已应用于对目标的凝视成像、合成孔径成像 等方向。通过变换轨道角动量的模态数,雷达可以获得涡旋方位维分辨率。国 内学者分析了电磁涡旋波的涡旋方位维成像潜力并给出了相关的成像算法。国 防科大给出了多发多收、多发单收环形天线下的涡旋电磁波回波信号模型并利 用快速傅里叶变换算法实现了目标的距离-涡旋方位角二维聚焦。中科院电子所 基于环形天线涡旋电磁波进行了合成孔径成像实验,表明电磁涡旋合成孔径雷 达具有近距离分辨力较高的特点。
电磁涡旋天线方向图有别于传统平面波方向图,其主瓣呈中空的环形分布。 为了进行涡旋方位维的成像,需要对不同模态涡旋电磁波的主瓣进行调整,使 其指向统一方向。目前,针对多模态涡旋电磁波主瓣指向控制问题,较为可行 的方案是通过多个同心圆环阵列半径发射不同模态的涡旋电磁波从而使得指向 趋向于一致。使用同心圆环阵列,需要对各圈圆环阵列半径进行设计。现有方 法采用高模态涡旋波拟合阵列半径与发射模态数间的对应函数,然而该方法低 模态电磁涡旋波的指向较设计方向误差较大,且当主板指向的变化时,其设计 性能也随之产生较大变动。
目前国内外对于高低模态指向一致的同心圆环阵列半径设计研究未见公开, 因此亟需一种能显著减小各模态方向图指向误差的同心圆环阵列半径设计方法, 这也是电磁涡旋雷达工程化需考虑的重要问题之一。
发明内容
本发明解决的技术问题是:针对目前现有技术中,传统高模态涡旋波拟合 阵列半径与发射模态数间对应函数计算方法存在的指向设计误差较大的问题, 提出了一种电磁涡旋雷达同心圆环阵列设计方法。
本发明解决上述技术问题是通过如下技术方案予以实现的:
一种电磁涡旋雷达同心圆环阵列设计方法,步骤如下:
(1)获取电磁涡旋雷达同心圆环圈数M、各圈同心圆环发射模态l
(2)根据步骤(1)所得发射方向图俯仰角指向θ
(3)利用步骤(2)所得二维分布图计算各圈同心圆环发射模态l
(4)根据步骤(3)所得归一化半径系数β
所述步骤(2)中,发射模态的辐射方向图信号强度U的表达式具体为:
β
式中,a
所述步骤(3)中,归一化半径系数β
β
式中,a
所述步骤(4)中,计算出归一化半径系数β
所述雷达同心圆环圈数范围为1~L圈,L为阵列圈数最大值,根据雷达设计 参数确定。
所述步骤(4)中,获取天线各圈阵列半径后,按照半波长沿圆环排列。
本发明与现有技术相比的优点在于:
本发明提供的一种电磁涡旋雷达同心圆环阵列设计方法,相比现有的阵列 设计算法,所提算法将高低模态涡旋电磁特性相结合,根据天线方向图与贝塞 尔函数的相关性,建立了阵列半径与方向图主瓣间的对应关系,再利用函数拟 合得到了阵列半径与俯仰主瓣指向间的线性关系式,并结合分析给出了涡旋电 磁波的圆阵设计流程。有效避免了低模态涡旋电磁波方向图指向误差较大的问 题,实现了多模态涡旋电磁波方向图主瓣指向的控制,各模态方向图指向误差 显著减少,系统性能提升明显。适用于电磁涡旋雷达同心圆环阵列的实际工程 应用。
附图说明
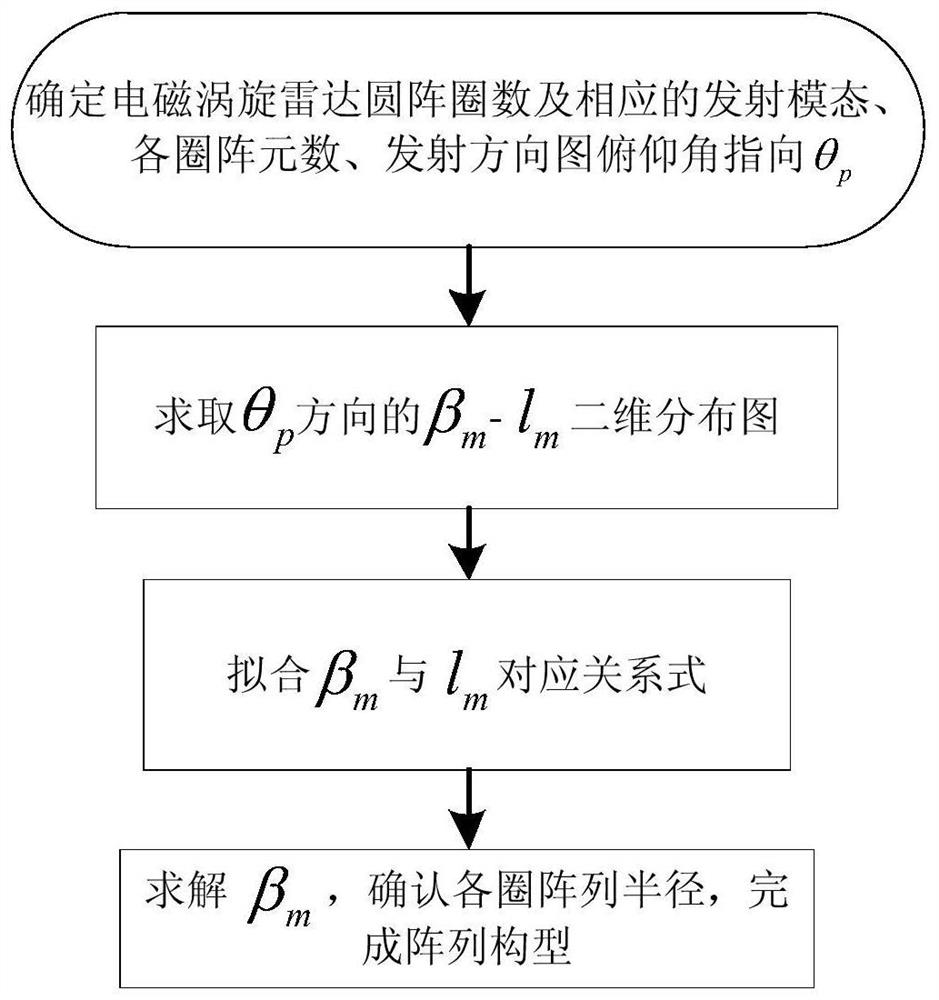
图1为发明提供的同心圆环阵列设计方法流程图;
图2为发明提供的于指定模态下环形阵列同心圆环天线方向图;
图3为发明提供的于指定模态下固定参数同心圆环天线方向图;
图4为发明提供的于指定模态下俯仰角相关阵列同心圆环天线方向图;
图5为发明提供的归一化后双目标涡旋方位像示意图;
具体实施方式
一种电磁涡旋雷达同心圆环阵列设计方法,应用于电磁涡旋雷达同心圆环 阵列设计,根据天线方向图与贝塞尔函数的相关性,建立了阵列半径与方向图 主瓣间的对应关系,再利用函数拟合得到了阵列半径与俯仰主瓣指向间的线性 关系式,并结合分析给出了涡旋电磁波的圆阵设计流程,如图1所示,具体步 骤如下:
(1)获取电磁涡旋雷达同心圆环圈数M、各圈同心圆环发射模态l
(2)根据步骤(1)所得发射方向图俯仰角指向θ
发射模态的辐射方向图信号强度U的表达式具体为:
β
式中,a
(3)利用步骤(2)所得二维分布图计算各圈同心圆环发射模态l
归一化半径系数β
β
式中,a
(4)根据步骤(3)所得归一化半径系数β
在本发明中,将阵列半径设计分为归一化半径系数β
下面结合具体实施例进行进一步说明:
步骤(1):获取电磁涡旋雷达同心圆环圈数M,各圈发射模态l
步骤(2):根据确定的θ
其中β
步骤(3):对步骤(2)中的信号强度二维分布图求取不同l
β
其中a
步骤(4):根据步骤(3)所得关系式,将各圈发射模态l
其中,在仿真实验中,雷达中心频率设定为10GHz,对环阵以及同心环阵 下的涡旋电磁波天线方向图进行对比分析,如图2-4所示,包括4种不同模态 下俯仰角指向θ
如图3所示,采用现有方法设计的同心圆环阵列,其主瓣指向误 差随着模态数的降低而增加,1模态下指向误差高达
如图5所示,为三种模态下归一化后的双目标涡旋方位像,发射模态为 [-20,-1]∪[1,20],俯仰角指向θ
如图5所示,由于环阵下各模态能量损失较大,两个目标被淹没在了噪声 背景下,现有方法中低模态涡旋电磁波主瓣指向误差较大导致目标涡旋方位像 与噪声幅度比较低,而本发明给出的方法由于各模态俯仰主瓣与设计方向一致 性较好,回波能量较高,涡旋方位像远远大于噪声幅度。
根据实施例中的仿真实验结果表明,与现有方法相比,本发明所提出的同 心圆环阵列设计方法的各模态方向图指向误差较小,特别是低模态下误差明显 下降,对涡旋方位维成像效果提升明显,具有一定的工程可实现性。
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
- 一种电磁涡旋雷达同心圆环阵列设计方法
- 一种基于同心圆环阵列天线的涡旋电磁波方向图综合方法