模拟射击系统及其坐标转换方法
文献发布时间:2023-06-19 10:36:57
技术领域
本申请涉及模拟射击技术领域,尤其涉及一种模拟射击系统及其坐标转换方法。
背景技术
射击类游戏和模拟军事训练通过屏幕显示目标,由枪手手拿模拟枪对屏幕显示目标进行射击;模拟枪中的惯性传感器、或者光学动捕相机捕玩家模拟枪的位置和姿态,确定模拟枪的射击方向,后端处理设备根据模拟枪的射击方向和显示屏显示的目标的坐标,确定枪手的射击是否命中目标。
为了能够保证后端处理设备准确地确定枪手开枪时的射击命中位置或者命中目标,显示屏幕需要做空间位置标定,在空间位置标定后显示屏的位置需要严格地固定,不能被移动。而在真实射击游戏和模拟军事训练中,根据实际场地需求和训练目标的要求,需要调整显示屏的位置,甚至布置多个显示屏;而常规的测量定位方法并不能快速地实现显示屏幕位置调整后的快速准确定位。
发明内容
为了解决上述技术问题或者至少部分地解决上述技术问题,本申请提供了一种模拟射击系统及其坐标转换方法。
一方面,本申请提供一种模拟射击系统,包括显示屏、第一光学标记组合、多个光学动捕相机和数据处理设备;
所述第一光学标记组合包括至少三个光学标记点;所述第一光学标记组合中的各个光学标记点配合而标定所述显示屏的位置和姿态;
所述光学动捕相机用于捕捉所述第一光学标记组合中的光学标记点而形成动捕图像;
所述数据处理设备用于根据所述动捕图像计算所述显示屏的位置和姿态;以及根据所述显示屏的位置和姿态计算所述显示屏显示的虚拟空间和现实空间的坐标转换关系。
可选地,所述第一光学标记组合中的光学标记点均固定在所述显示屏上。
可选地,所述模拟射击系统还包括一独立于所述显示屏的测距仪;
所述第一光学标记组合中的光学标记点固定在所述测距仪上;
所述数据处理设备用于根据所述动捕图像和至少两个测量距离确定所述显示屏的位置和姿态;
其中:所述测量距离为所述测距仪测量得到的、测距仪发光点到所述显示屏上预先选定点的距离。
可选地,所述模拟射击系统还包括一独立于所述显示屏的刚性体;所述刚性体上设置有直线标记;
所述第一光学标记组合中的光学标记点固定在所述刚性体上;
所述数据处理设备用于根据所述动捕图像和至少两个测量距离确定所述显示屏的位置和姿态;
其中:所述测量距离为所述直线标记对准所述显示屏上的预先选定点时,所述直线标记上特定点到所述预先选定点的距离。
可选地,所述模拟射击系统还包括模拟枪支和安装在所述模拟枪支上的第二光学标记组合;
所述第二光学标记组合包括至少三个光学标记点;所述第二光学标记组合中的光学标记点用于标定所述模拟枪支的位置和姿态;
所述光学动捕相机捕捉得到的所述动捕图像包括所述第二光学标记组合中的光学标记点的信息;
所述数据处理设备还用于根据所述动捕图像确定所述模拟枪支的位置和姿态;以及,根据所述模拟枪支的位置和姿态确定所述模拟枪支的指向。
可选地,所述光学标记点为主动发光点;所述第一光学标记组合和所述第二光学标记组合的灯语信息不相同;
所述数据处理设备存储有所述第一光学标记组合和所述第二光学标记组合的灯语信息。
另一方面,本申请提供一种模拟射击系统的坐标转换方法,用于确定模拟射击系统中显示屏显示虚拟空间和现实空间的坐标转换关系,包括:
获取光学动捕相机捕捉第一光学标记组合中的光学标记点而形成的动捕图像;所述光学标记点组合包括至少三个光学标记点,所述第一光学标记组合中的各个所述光学标记点配合而标定显示屏的位置和姿态;
根据所述动捕图像确定所述显示屏的空间位置和姿态;
根据所述显示屏的空间位置和姿态确定所述虚拟空间和所述现实空间的坐标转换关系。
可选地,所述第一光学标记组合中的光学标记点均固定在独立于所述显示屏的测距仪上;
所述方法还包括:获取所述测距仪输出的测量距离;所述测量距离为所述测距仪发光点到所述显示屏上预先选定点的距离;
根据所述动捕图像确定所述显示屏的空间位置和姿态,包括:根据所述动捕图像和至少两个所述测量距离,确定所述显示屏的空间位置和姿态。
可选地,各个所述光学标记点均为主动发光点;所述模拟射击系统包括多个显示屏;
所述模拟射击系统包括与各个所述显示屏一一对应的多个所述第一光学标记组合;各个所述第一光学标记组合中的光学标记点组合形成的灯语信息各不相同;
根据所述动捕图像确定所述显示屏的空间位置和姿态,包括:
根据所述动捕图像和所述第一光学标记组合的灯语信息,分别确定各个所述显示屏的空间位置和姿态。
可选地,所述模拟射击系统还包括模拟枪支和安装在所述模拟枪支上的第二光学标记组合;
各个所述第二光学标记组合均至少包括至少三个光学标记点;所述第二光学标记组合中的光学标记点用于标定所述模拟枪支的位置和姿态;
所述方法还包括:根据所述动捕图像确定所述模拟枪支的瞄准方向;
根据所述瞄准方向和所述坐标转换关系确定所述模拟枪支瞄准的,在所述虚拟空间显示的目标。
本申请提供的模拟射击系统中,利用第一光学标记组合和光学动捕相机,结合相应的数据处理设备可以快速地确定显示屏的位置和姿态,也就能够快速地确定虚拟空间和现实空间的坐标转换关系。采用前述的模拟射击系统,在显示屏被移动后,仍然可以快速地确定显示屏的位置和姿态,继而确定虚拟空间和显示空间的坐标转换关系,因此可以实现多样化模拟射击场景的快速部署。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
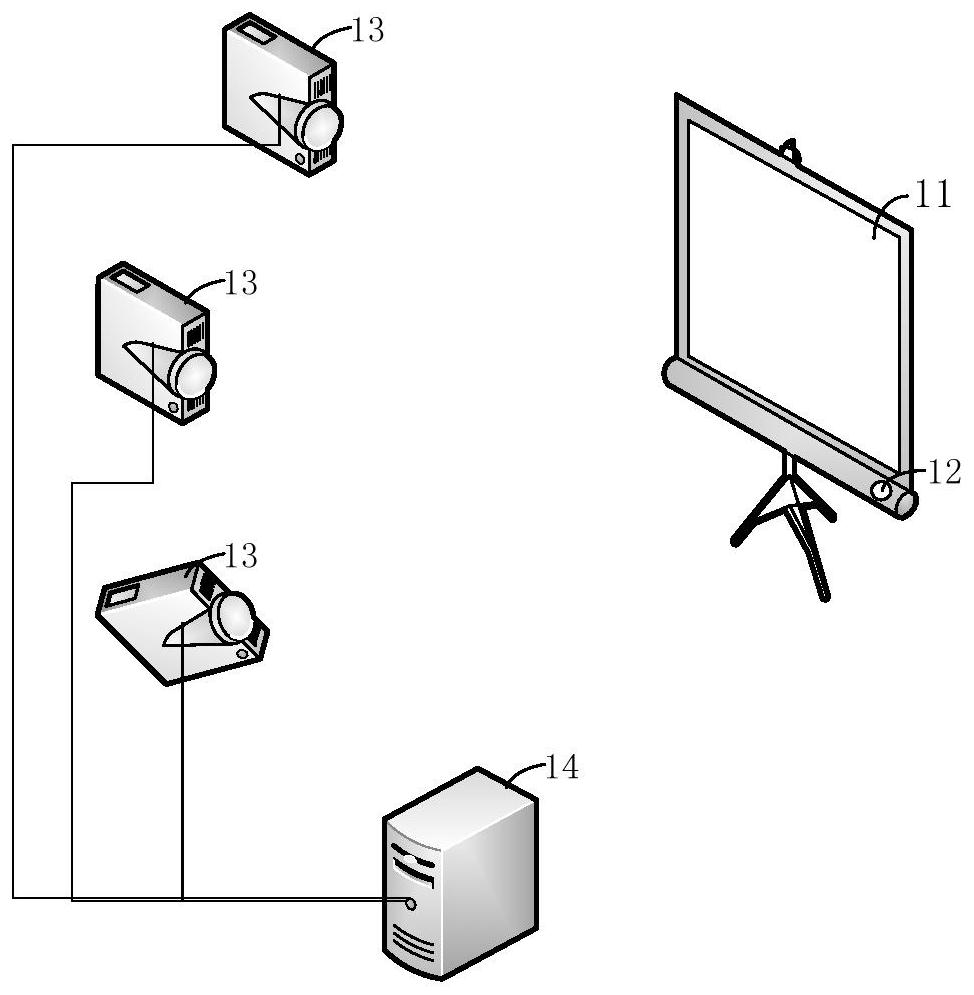
图1是本申请实施例提供的模拟射击系统的结构示意图;
图2是本申请实施例提供的一种模拟射击系统的示意图;
图3是本申请实施例提供的模拟射击系统的坐标转换方法的流程图;
其中:11-显示屏,12-第一光学标记组合,13-光学动捕相机,14-数据处理设备,15-测距仪,16-模拟枪支,17-第二光学标记组合。
具体实施方式
为了能够更清楚地理解本申请的上述目的、特征和优点,下面将对本申请的方案进行进一步描述。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
在下面的描述中阐述了很多具体细节以便于充分理解本申请,但本申请还可以采用其他不同于在此描述的方式来实施;显然,说明书中的实施例只是本申请的一部分实施例,而不是全部的实施例。
本申请实施例提供一种模拟射击系统及其坐标转换方法,能够快速地根据显示屏的位置确定显示屏显示虚拟空间和现实空间的坐标转换关系,继而能够实现显示屏的随意移动和多样化部署。
图1是本申请实施例提供的模拟射击系统的结构示意图。如图1所示,本申请实施例提供的模拟射击系统包括显示屏11、第一光学标记组合12、多个光学动捕相机13和数据处理设备14。
本申请实施例中,显示屏11为在一设定空间范围内任意设置的显示屏11;显示屏11可以是各种类型的显示屏11,其可以是主动发光式的平面显示屏、曲面显示屏或者球面屏,也可以是被动式发光的投影屏。
第一光学标记组合12是用于标记显示屏11位置和姿态的光学标记组合。第一光学标记组合12中设置有至少三个光学标记点;第一光学标记组合12中的各个光学标记点配合而标定显示屏11的位置和姿态。
光学动捕相机13用于捕捉第一光学标记组合12中的光学标记点而形成动捕图像。本申请实施例中,光学动捕相机13的数量为多个,多个光学动捕相机13相对均匀的布置;各个光学动捕相机13的位置均被标定,以能够建立其动捕图像和现实空间的坐标对应关系。
数据处理设备14用于根据光学动捕相机13采集的动捕图像确定显示屏11的空间位置和姿态;在确定显示屏11的空间位置和姿态后,数据处理设备14根据显示屏11的空间位置和姿态确定显示屏11显示的虚拟空间和现实空间的坐标转换关系。
根据前述的分析可知,第一光学标记组合12中光学标记点和显示屏11的相对位置关系确定后,再通过动捕图像确定第一光学标记组合12中光学标记点在现实空间的坐标后,就可以通过相对坐标转换确定显示屏11的位置和姿态。
在确定现实屏的位置和姿态,并且确定显示屏11显示的虚拟空间与显示屏11像素关系的情况下,根据显示屏11的位置和姿态即可以确定显示屏11显示的虚拟空间和现实空间的坐标转换关系。
通过前述的分析可知,本申请实施例中利用第一光学标记组合12和光学动捕相机13,结合相应的数据处理设备14可以快速地确定显示屏11的位置和姿态,也就能够快速地确定虚拟空间和现实空间的坐标转换关系。
采用前述的模拟射击系统,在显示屏11被移动后,仍然可以快速地确定显示屏11的位置和姿态,继而确定虚拟空间和显示空间的坐标转换关系,因此可以实现多样化模拟射击场景的快速部署。
本申请实施例中,第一光学标记组合12中的光学标记点的部署方式有如下几种。
第一种情况下,第一光学标记组合12中的光学标记点均固定在显示屏11上,此时第一光学标记组合12中的光学标记点与显示屏11上的相对位置关系已经确定。
在此情况下,如果需要布置多个显示屏11,需要设置多组第一光学标记组合12;或者,需要将第一光学标记组合12中的光学标记点设置为可拆卸标记点,并将各个光学标记点设置在显示屏11上特定位置。
图2是本申请实施例提供的一种模拟射击系统的示意图,如图2所示,第二种情况下,模拟射击系统除了包括第一光学标记组合12、动捕相机、数据处理设备14和显示屏11外,还包括测距仪15。第一光学标记组合12中的光学标记点固定在一独立于显示屏11的测距仪15上。
此时,测距仪15上的发光点与第一光学标记组合12中的光学标记点的相对位置关系已经确定。
对应的,数据处理设备14可以根据动捕图像和至少两个测量距离确定显示屏11的位置和姿态;测量距离测距仪15测量得到的发光点到显示屏11上预先选定点的距离。
在第二种情况下,数据处理设备14根据动捕图像可以确定测距仪15的位置和姿态,继而确定测距仪15发光点的空间坐标和测距仪15发光点发出光线的延伸方向。在确定测距仪15测量得到的、显示屏11上预先选定点到测距仪15发光点的测量距离后,根据测量距离和测距仪15的指向方向既可以确定两个预先选定点的空间坐标。
根据预先选定点的空间坐标、以及两个预先选定点在显示屏11上的位置,即可以确定显示屏11的位置和姿态。
本申请实施例中,测距仪15可以为激光测距仪15。在采用前述方法的情况下,使用一个测距仪15和一个第一光学标记组合12即可以确定多个显示屏11的位置和姿态,继而减小第一光学标记组合12的数量。
当然,在实际应用中,本申请实施例中还可以设置一个具有直线段标记的刚性体,在测量前述距离时可以采用直线标记对准显示屏11上的预先选定点,随后利用软尺等测量设备测量直线段上某一特定点到预先选定点的距离,继而确定测量距离。
本申请实施例提供的模拟射击系统中,除了包括前述的显示屏11、第一光学标记组合12、多个光学动捕相机13和数据处理设备14外,还包括模拟枪支16和第二光学标记组合17。
第二光学标记组合17包括至少三个光学标记点。第二光学标记组合17中的光学标记点固定在模拟枪支16上,用于标定模拟枪支16的位置和姿态。
光学动捕相机13在捕捉第一光学标记组合12中的光学标记点形成动捕图像时,还同时捕捉第二光学标记组合17中的光学标记点并体现在动捕图像上。数据处理设备14还用于根据动捕图像确定模拟枪支16的位置和姿态,以及根据模拟枪支16的位置和姿态确定模拟枪支16的指向。
实际应用中,采用前述的模拟射击系统,采用光学动捕相机13除了可以测量显示屏11位置外,还可以测量模拟枪支16的指向,实现模拟射击系统中各种数据的测量。
当然,在本申请实施例其他应用中,模拟枪支16上也可以安装惯性传感器,以利用惯性传感器确定模拟枪支16的指向。在已知某一模拟枪支16激发的情况下,根据模拟枪支16的指向以及前文中确定的坐标转换关系,就可以确定模拟枪支16实际瞄准的虚拟空间中的目标。
本申请实施例中,光学标记点为主动发光点。通过调整各个主动发光点的发光频率等发光特性,可以使得第一光学标记组合12和第二光学标记组合17形成的灯语信息不相同;数据处理设备14存储有各个第一光学标记组合12和第二光学标记组合17的灯语信息。
在数据处理设备14处理光学动捕相机13拍摄的动捕图像时,可以根据灯语信息和动捕图像内容确定出第一光学标记组合12和第二光学标记组合17,继而区分出显示屏11和模拟枪支16。
当然,在其他应用中,如果第一光学标记组合12、第二光学标记组合17中各个光学标记点的相对空间位置不同,也可以将第一光学标记组合12和第二光学标记组合17中的各个发光点设置为被动发光点,由数据处理设备14在接收到动捕图像后,通过被动发光点之间的位置关系确定是对应的第一光学标记组合12和第二光学标记组合17。
除了提供前述的模拟射击系统外,本申请实施例还提供一种模拟射击系统的坐标转换方法,坐标转换方法用于确定模拟射击系统中显示屏11显示虚拟空间和现实空间之间的坐标转换关系。
图3是本申请实施例提供的模拟射击系统的坐标转换方法的流程图。如图3所示,本申请实施例提供的方法包括步骤S101-S103。
S101:获取光学动捕相机捕捉第一光学标记组合中的光学标记点而形成的动捕图像。
步骤S101中,第一光学标记组合至少包括至少三个光学标记点,各个光学标记点相对于显示屏的位置可以直接确定或者通过数据计算确定;各个光学标记点配合而可以用于标定显示器的位置和姿态。
本申请实施例中,模拟射击系统部署有多个光学动捕相机、,多个光学动捕相机相对均匀的布置;各个光学动捕相机的位置均被标定,以能够建立其获取的动捕图像和现实空间的坐标对应关系。
S102:根据动捕图像确定显示屏的空间位置和姿态。
根据动捕图像确定显示屏的空间位置和姿态,是在获取动捕图像后,基于动捕图像确定各个光学标记点的位置,再根据各个光学标记点相对于显示屏的位置,确定显示屏的空间位置和姿态。
S103:根据显示屏的空间位置和姿态确定虚拟空间和现实空间的坐标转换关系。
在显示屏的空间位置和姿态确定后,显示屏中的各个像素在空间坐标系中的位置坐标特性也就确定;而显示屏各个像素显示的内容在虚拟坐标系中坐标可以根据显卡运算得到。在确定显示屏各个像素点在两个坐标系下的位置后,即可以确定虚拟空间和现实空间的坐标转换关系。
虚拟空间和现实空间的坐标转换关系可以用于模拟射击系统中模拟枪支射击目标位置的计算,继而确定模拟枪支激发后是否能命中特定的目标。
本申请实施例中,第一光学标记组合中的光学标记点是固定在独立于显示屏的测距仪上的标记点。在此情况下,步骤S102中具体包括步骤S1021和S1022。
S1021:获取测距仪测量输出的测量距离。
步骤S1021中的测量距离为测距仪的发光点到显示屏上的预先选定点的距离,也就是将显示屏的预先选定点调整至测距仪发光光线所在直线上后,确定的距离。
S1022:根据动捕图像和至少两个测量距离,确定显示屏的空间位置和姿态。
因为第一光学标记组合的光学标记点固定在测距仪上,所以后续根据第一光学标记组合可以确定测距仪的指向,根据测距仪的指向和测量距离,也就可以确定显示屏上特定点的空间坐标。在确定至少两个特定点的空间坐标后,根据特定点在显示屏上的相对位置和显示屏的尺寸,即可以确定显示屏的空间位置和姿态。
本申请实施例中,各个光学标记点均为主动发光点,模拟射击系统可以包括多个显示屏。模拟射击系统包括与各个显示屏一一对应的多个第一光学标记组合,并且各个第一光学标记组合中的光学标记点组合形成的灯语信息各不相同。
对应的步骤S102中,根据动捕图像确定显示屏的空间位置和姿态具体为:根据动捕图像和第一光学标记组合的灯语信息,分别确定各个显示屏的空间位置和姿态。
因为各个第一光学标记组合的灯语信息各不相同,所以采用不同的光学标记组合后,仍然可以根据各个第一光学标记组合中光学标记点的发光频率组合确定是哪一个第一光学标记组合,继而确定是哪一个显示屏,随后也就可以分别确定各个显示屏的空间位置和姿态。
本申请实施例具体应用中,模拟射击系统还可以包括模拟枪支和安装在模拟枪支上的第二光学标记组合。各个第二光学标记组合也至少包括三个光学标记点,各个第二光学标标记组合中的光学标记点配合而标定模拟枪支的位置和姿态。
在具有模拟枪支和第二光学标记组合的情况下,前述的坐标转换方法还可以包括步骤S104和S105。
S104:根据动捕图像确定模拟枪支的瞄准方向。
S105:根据瞄准方向和坐标转换关系确定模拟枪支瞄准的,在虚拟空间显示的目标。
根据动捕图像确定模拟枪支的瞄准方向,是基于动捕图像中确定第二光学标记组合中各个光学标记点的方位信息,根据多个光学标记点的方位信息以及光学标记点在模拟枪支的位置,确定模拟枪支的枪口指向,继而根据枪口指向确定模拟枪支的瞄准方向。
在确定瞄准方向后,根据步骤S103的坐标转换关系,可以确定瞄准方向上确定其在虚拟空间中的指向目标。
需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上所述仅是本申请的具体实施方式,使本领域技术人员能够理解或实现本申请。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本申请的精神或范围的情况下,在其它实施例中实现。因此,本申请将不会被限制于本文所述的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 模拟射击系统及其坐标转换方法
- 模拟射击系统及其坐标转换方法