测量装置、测量系统、测量程序以及测量方法
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及反射特性的测量装置、测量系统、测量程序以及测量方法。
背景技术
作为对象物的视觉质感的构成要素,″反射特性″非常重要。反射特性在数据归档和品质管理等领域中起着重要作用。在测量反射特性时,通过将入射光照射至物体并检测其反射光的方式进行采样。反射特性表示为函数,所述函数是从变量所形成的空间上采样的值来推定的。例如,非专利文献1公开了一种能够测量反射特性的测角仪。测角仪是由光源以及光检测器等构成的测量装置,以可在任意的采样方向上测量数值的特征而被广泛使用。
现有技术文献
非专利文献
非专利文献1:Sing Choong Foo著,″A gonioreflectometer for measuring thebidirectional reflectance of material for use in illumination computation″,1997 年。
发明内容
然而,当使用诸如测角仪等测量装置来测量反射特性时,需要从大量的方向上对入射光/反射光进行采样。例如,在反射特性中相对简单的各向同性的双向反射率分布函数(Bidirectional Refflectance Distribution Function:BRDF)具有三个自由度的角度参数,但若假设每个参数各采样一次,则会是90×90×180=1,458,000的庞大采样数,并且测量时间较长也会成为问题。因此,可以说需要进一步缩短测量反射特性所需的时间。
针对以上情况,本发明旨在提供一种能够以少数采样快速且高精准度地测量所期望的对象物的反射特性的测量装置、测量系统、测量程序以及测量方法。
根据本发明的一种实施方式,提供一种反射特性的测量装置,其特征在于具备控制部,所述控制部构成为基于对象信息和指令信息来测量对象物的反射特性,所述对象信息是包含与入射光的光源位置、反射光的光检测位置和所述对象物中的测量部位的坐标位置关系以及所述入射光和所述反射光有关数值的信息,所述入射光是被照射至所述测量部位的光,所述反射光是由所述入射光被照射至所述测量部位然后从所述测量部位反射的光,所述指令信息是与所述反射特性的已知测量结果有关的信息,所述对象信息所包含的所述坐标位置关系的组合数为1~15。
本发明所涉及的测量装置基于包含光源位置、光检测位置和测量部位的坐标位置关系 (采样方向)与入射光和反射光有关数值(采样值)的信息(对象信息)以及反射特性的已知测量结果有关的信息(指令信息)来测量对象物的反射特性。特别需要留意的是,对象信息所包含的坐标位置关系的组合数(采样数)为1~15。具有这种构造的测量装置可以起到在很短时间内能够测量所期望的反射特性的效果。
附图说明
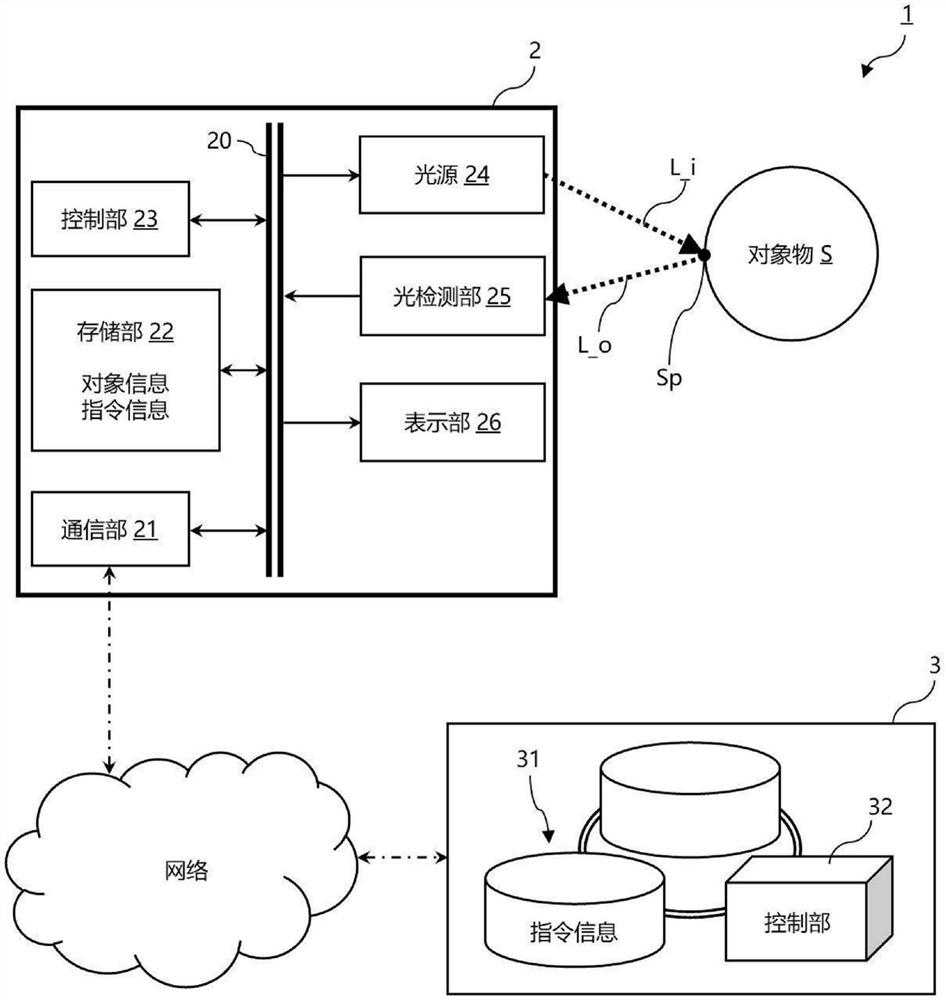
图1为本实施例所涉及的测量系统的结构概要图。
图2为本实施例所涉及的测量装置中控制部的功能模块图。
图3A及图3B为表示Rusinkiewicz坐标系的图。
图4为表示神经网络的概要图。
图5为表示样本数为6的示例图。
图6A为表示图5所示情况下的反射特性的测量结果的图,图6B为表示图5所示情况下的反射特性的真值的图。
图7为表示样本数为3的示例图。
图8A为表示图7所示情况下的反射特性的测量结果的图,图8B为表示图7所示情况下的反射特性的真值的图。
图9为表示本实施例所涉及的测量方法的流程图。
图10A为表示对象物的反射率分布即光泽度(相当于反射率)分布的图,图10B为表示对象物的BRDF分布的图。
图11A为测量对象物(白色且无彩色)的光泽度以推定Full BRDF,并将其作为不同物体的计算机图形(斯坦福兔子)输出的示例,图11B为测量对象物(白色和非白色双方的无彩色均包含的情况)的光泽度以推定Full BRDF,并将其作为不同对象的计算机图形 (斯坦福兔子)输出的示例,图11C为测量对象物(非白色且无彩色)的光泽度以推定Full BRDF,并将其作为不同对象的计算机图形(斯坦福兔子)输出的示例。
图12为测量对象物(有彩色)的光泽度以推定Full BRDF,并将其作为不同物体的计算机图形(斯坦福兔子)输出包括颜色信息在内的示例。
具体实施方式
以下将结合附图对本发明实施例进行说明。以下示出的实施例中的各种特征事项均可互相组合。特别是在本说明书中的″部″可以是包含了例如广义上的电路实现的硬件资源和由这些硬件资源具体实现的软件信息处理的组合的概念。此外,在本实施例中涉及了各种信息,这些信息作为由0或1所组成的二进制位集通过信号值的高低来表示,并且可以在广义的电路上执行通信及计算。
此外,广义上的电路是通过至少适当地组合电路(Circuit)、电路类(Circuitry)、处理器(Processor)、以及存储器(Memory)等来实现的电路。即,包含了面向特定用途的集成电路(Application Specific Integrated Circuit:ASIC),可编程逻辑设备(例如简单可编程逻辑设备(Simple Programmable Logical Device:SPLD)、复合可编程逻辑设备(Complex Programmable Logic Device:CPLD))以及现场可编程门阵列 (FieldProgrammable Gate Array:FPGA)等。
1.整体结构
图1为本实施例所涉及的测量系统1的结构概要图。测量系统1构成为可测量对象物S 的反射特性。如图1所示,测量系统1具有测量装置2和信息处理装置3,其两者通过网络相互连接。在第1.1~1.2节中,将对测量装置2和信息处理装置3分别进行说明。
1.1测量装置2
测量装置2具有通信部21、存储部22、控制部23、光源24、光检测部25,以及表示部26,这些构成要素在测量装置2的内部经由通信线路20进行电连接。以下将对各构成要素进一步说明。
<通信部21>
通信部21虽优选诸如USB、IEEE1394、Thunderbolt以及有线LAN网络通信等有线通信方式,但根据需要也可包含无线LAN通信、LTE/3G等移动通信、Bluetooth(注册商标) 通信等方式。即,优选为通过这样多个通信方式的结合来实施。此外,还可以经由通信部 21与作为外部设备的后述信息处理装置3通信的同时来测量反射特性,或者是在离线环境中独立操作。此外,还可以将所测量的反射特性发送至信息处理装置3。
<存储部22>
存储部22(权利要求范围中″存储介质″的一例)用来存储所述定义的信息。例如,存储部22存储对象信息、指令信息以及为了让控制部23执行的种种程序等。这是通过诸如固态驱动器(Solid State Drive:SSD)之类的存储设备,或者是存储与程序操作相关的临时必要信息(参数、数组等)的随机存取存储器(Random Access Memory:RAM) 等内存的方式来实施。此外,还可以将这些进行各种组合。
对象信息是用于测量对象物S的反射特性所需的采样数据,并且由后述的光源24(入射光)、光检测部25(反射光)和对象物S的一部分的测量部位Sp的坐标位置以及与入射光和反射光有关的数值(放射强度等)来定义。此外,指令信息是关于反射特性的已知测量结果的信息,并且是使用后述的机器学习来推定反射特性时所使用的指令数据。一般而言,指令信息可以是例如包含了基于已知测量结果而机器学习的各种参数的信息,但也可以是包含了测量结果本身的信息。另外,在实施测量装置2时可以预先将指令信息存储在存储部22中,但也可根据需要经由通信部21从信息处理装置3下载指令信息的更新数据并将其存储。此外,所下载的指令信息的更新数据可以是存储在信息处理装置3中的指令数据的全部或一部分。
<控制部23>
控制部23执行与测量装置2相关的整体操作的处理和控制。控制部23是例如未图示的中央处理器(Central Processing Unit:CPU)。控制部23通过读取存储部22所存储的规定程序来实现测量装置2所涉及的种种功能。虽然在图1中显示的是单个控制部23,但实际上并不仅限于此,根据功能也可通过多个控制部23(专用芯片等)来实施。此外,也可以将这些进行各种组合。
图2是详述了控制部23有关功能的功能模块图。控制部23具有光源点灯部231、反射特性推定部232、渲染部233。光源点灯部231在测量反射特性时根据需要点亮光源24。反射特性推定部232基于作为采样数据的对象信息和存储在存储部22中的指令信息来测量测量部位Sp的反射特性。更具体地,反射特性推定部232通过神经网络基于机器学习来测量反射特性。所述机器学习为输入对象信息,将指令信息作为指令数据使用,并输出反射特性(参照第3节)。然后,通过准备多个这样的对象信息推定地测量对象物S的反射特性。渲染部233可以通过执行具有该反射特性的对象物S的计算机图形的渲染来生成该计算机图形。
<光源>
光源24构成为可将入射光L_i照射至作为对象S的一部分的测量部位Sp。入射光L_i优选为一般的漫射白光(至少含有RGB成分)。基于所述光源点灯部231的点灯命令信号,光源24经由未图示的点灯回路被点亮。此外,作为对象信息中的一个参数的入射光有关数值没有特别限定,可以采用预先存储在存储部22中的数值。
<光检测部25>
光检测部25是检测出光并将其转换成电信号的元件,例如包括光电二极管、光电子倍增管、光电导元件、CCD、照相机等。在此,光检测部25构成为可检测由入射光L_i被照射至作为对象物S的一部分的测量部位Sp然后反射的反射光L_o。被检测出的反射光L_o被转换成电信号,并作为对象信息的一个参数即反射光有关数值信息被存储至存储部22。
<表示部26>
表示部26是通过刺激用户的视觉来呈现信息的显示器。当然,在表示部26的基础上,还可以组合式地追加诸如扬声器(未图示)、振动器(未图示)等其他感官相关的信息呈现。更具体地来说,根据用途可通过多峰或交叉峰的方式来强调。通过这样的结构,可向观察者虚拟地呈现对象物S的质感,还可扩展至″综合性质感呈现系统″。特别是,表示部26可基于对象信息及指令信息通过控制部23来表示所测量的反射特性。更详细地,可以表示具有所述反射特性的对象物S的计算机图形。进而,有关这样的计算机图形还可以被实施为各种物体上的印刷、颜色投影或是投影映射等。
1.2信息处理装置3
如图1所示,信息处理装置3,也就是工作站(Work Station),具有存储部31和控制部32。当然,根据需要可以使用USB、IEEE1394、Thunderbolt、有线LAN网络通信等有线型的通信方式,或是无线LAN网络通信、LTE/3G等移动通信以及Bluetooth(注册商标)等无线通信方式。经由这样的通信方式可以与测量装置2实现通信。以下,将进一步对信息处理装置3所涉及的各个构成要素进行说明。
<存储部31>
存储部31(权利要求范围中″存储介质″的一例)用于存储第1.1节中所说明的指令信息以及为了让控制部32执行的各种程序。其可以作为例如硬盘驱动器(Hard DiskDrive: HDD)或固态驱动器(Solid State Drive:SSD)等存储设备来实施。当然,也可作为存储程序计算所涉及的临时必要信息(参数、数组等)的随机存取存储器(Random AccessMemory:RAM)之类的存储器来实施,并优选为将这些进行各种组合。
尽管没有特别限制,但存储在存储部31中的指令信息优选构成为能够追加数据。这样一来,经由网络与信息处理装置3连接的测量装置2可以获得信息量更丰富的最新指令信息。即,可以期待提高通过测量装置2中的控制部23所测量的反射特性的准确度。
<控制部32>
控制部32执行与信息处理装置3相关的整体操作的处理和控制。控制部32是例如未图示的中央处理器(Central Processing Unit:CPU)。控制部32通过读取存储在存储部31 中的规定程序来实现信息处理装置3有关的各种功能。在本实施例中,对这些功能的详细说明将被省略。
2.反射特性
在第2节中,将对本实施例所涉及的测量系统1所测量的反射特性的一例进行详细说明。
首先,作为表现反射特性的函数,存在发射双向散射表面反射率分布函数(Bidirectional Scattering Surface Reflectance Distribution Function:BSSRDF),其具体表示为[公式1]。
[公式1]
在此,E_i、x_i、w_i(
[公式2]
作为获取BRDF坐标系的方法,除了如前所述以入射光L_i和反射光L_o的方向为基准的坐标系之外,还已知基于半矢量定义的Rusinkiewicz坐标系。半矢量ω_h被表示为[公式 3]。
[公式3]
在此,假设各向同性即反射特性相对于围绕法线n的旋转不变,ω_h的自由度为1,如 [公式4]所示是以θ_h、θ_d、
[公式4]
f
虽然在发纹处理过的金属、珠宝和纺织品等材料中发现了各向异性反射,但在此为简单起见假定为各向同性。即,在本实施例中,假设对象物S是可以忽略表面下散射的影响而且各向同性成立的材料,即以各向同性BRDF表示反射特性的材料。此外,可以将[公式4]中所示的函数简单地描述为f(θ_h、θ_d、
3.使用神经网络进行机器学习
在第3节中,将详细说明使用神经网络的机器学习(权利要求范围中″第2机器学习″的一例)。在本实施例所涉及的反射特性的测量中,为实现高速的反射特性测量而采用减少样本数量(权利要求范围中″组合数″的一例)的方式。这被称为最小采样方法。此外,为了达到高速化,不采用适应地确定采样方向,而是使用预定方向。因此,其优点在于在测量装置2的构成中不需要具备可动部分。
当采用最小采样方法时,有必要推定未采样的方向的数据,因此提高准确度便成为课题。在本实施例中,提供了一种使用神经网络来输入采样数据并输出反射特性的推定器(反射特性推定部232)。通过设计这样的推定器,可以同时优化模型生成和模型参数推定,从而有望提高性能。
此外,由于学习了特定采样方向的反射特性模型,因此不存在反射特性模型好或不好的采样方向,且可以相对于采样方向自由地构建推定器。因此,可以扩展现有光泽计的功能以提供更紧凑的测量装置2。在第6节中将对此详细说明。
在此,为了提高推定准确度,反射特性推定部232导入由[公式5]表示的被称为cos- mapping的转换。
[公式5]
图4是神经网络NN的概要图。由各种参数规定的输入信号被输入到第一层L1。在此,输入信号是包含了采样方向(权利要求范围中″坐标位置关系″的一例)和采样值(权利要求范围中″入射光和反射光有关数值″的一例)的对象信息。这样的输入信号分别从第一层L1的计算节点N_11~N_13输出至第二层L2的计算节点N_21~N_25。此时,将从计算节点N_11~N_13输出的值乘以在各计算节点N之间设置的权重w而获得的值输入至计算节点N_21~N_25。
计算节点N_21~N_25与来自计算节点N_11~N_13的输入值相加,并将这样的值(或将这样的值与预定偏置值加算的值)输入至预定的激活函数。作为激活函数,例如运用如 [公式6]所示函数。
[公式6]
然后,激活函数的输出值被传播至作为下一个节点的计算节点N_31。此时,将通过在计算节点N_21~N_25与计算节点N_31之间设置的权重w乘以所述输出值而获得的值输入至计算节点N_31。计算节点N_31将输入值相加并将总值作为输出信号输出。此时,计算节点N_31可以将输入值相加,并将通过偏置值与总值相加而获得的值输入到激活函数,且将输出值输出为输出信号。由此,输出推定的BRDF。
应当注意的是,图4所示的内容仅出于解释的目的,并不仅限于此。例如,在本实施例中,还可以采用具有两个中间层的方式。中间层的节点数是可调参数,例如(64,2048),(128,1024),(256,512),(512,256),(1024,128),(2048,64)等等,其中优选为(128,1024),(512,256),且更优选为(128,1024)。此外,作为已知反射特性的测量结果的指令信息,优选采用收集了各向同性BRDF的适当数据库中所包含的信息。
4.测量
通过使用如上所述的测量系统1,可以减少采样的数量,并且可以基于比以前更加快速和更高的精准度来测量BRDF即反射特性。所述采样数量例如为1~15,优选为2~10,甚至更优选为3~6。具体而言,例如1、2、3、4、5、6、7、8、9、10、11、12、13、14、15,或是在此处例示的任意两个数值之间的范围内皆可。例如,如图5所示,当以采样数为6进行测量时,可以获得如图6A所示的结果。应当注意的是,图6B是对该结果的真值的预先测量。这种测量采用了以下采样方向。然而,
这种组合参考了已知的工业标准,其中光源24的位置在三个不同的位置,且光检测部 25的位置(即反射光的检测位置)在四个不同的位置(分别为图5中的光源24a~24c以及光检测部25a~25d)。当然,这仅是示例,并不仅限于此。虽然光源24和光检测部25优选为被分开准备以便消除可动部位,但是可以设置可动部分以使得一个光源24和光检测部25可以重复使用。当比较图6A和图6B时,两者之间没有明显的差异,并且已经达到了高速和高精准度地测量反射特性的目的。
进而,如图7所示,当以采样数为3进行测量时,可以获得如图8A所示的结果。应当注意的是,图8B是对这种结果的真值的预先测量。这种测量采用了以下的采样方向。然而,
这样的组合是根据所述工业标准独自设置出来的,光源24的位置被设置为三个不同的位置,光检测部25的位置(即反射光的检测位置)为一个位置(分别在图7中的光源 24d~24f和光检测部25)。当然,这仅是示例,并不仅限于此。虽然光源24和光检测部25 优选为被分开准备以便消除可动部分,但是可以设置可动部分以使得一个光源24和光检测部25可以重复使用。当比较图8A和图8B时,两者之间没有明显的差异,并且已经达到了高速和高精准度地测量反射特性的目的。
5.使用测量装置2的测量方法
在第5节中,将涉及使用到目前为止所说明的测量装置2来测量物体S的反射特性的测量方法的示例。图9是此测量方法的流程图。以下将对图9所示的各个步骤依次进行说明。
[开始]
(步骤S1)
步骤S1(权利要求范围中″光照射步骤″的一例)为,在测量装置2中,控制部23中的光源点灯部231读取存储在存储部22中的规定程序。然后,以规定的强度点亮光源24,从而将入射光L_i照射至对象物S中的测量部位Sp。光源24的坐标位置和规定强度被存储在存储部22中。
(步骤S2)
步骤S2(权利要求范围中″光检测步骤″的一例)为,步骤S1中照射至测量部位Sp的入射光L_i进行反射,且光检测部25以规定强度检测反射光L_o。光检测部25和测量部位Sp的坐标位置以及检测出的规定强度被存储在存储部22中。
(步骤S3)
步骤S3(权利要求范围中″测量步骤″的一例)为,控制部中的反射特性推定部232基于存储部23中所存储的信息(参照所述步骤S1和S2)即对象信息以及同样预先存储在存储部23中的指令信息来测量对象物S的反射特性。更详细地,通过神经网络以机器学习来推定测量反射特性。此时,包含对象信息的坐标位置关系的组合数与传统反射特性的测量手法相比较小,例如被设定在1~15或更小的范围内。
[结束]
6.变形例
此外,还可通过以下实施方式对本实施例进一步创意筹划。
第一,可以将从测量结果获得的反射特性作为示例适用于对象物S不同的物体。换句话说,信息处理装置3中的控制部32执行不同对象的计算机图形的渲染以具有对象物S的反射特性。即,有望将其应用于动画内容制作领域,例如将预先测量的反射特性应用于所期望的对象。对此,将在第7节中以现有的光泽计和色度计为例进行详细说明。
第二,可以执行与测量装置2中的控制部23(更具体而言是反射特性推定部232和渲染部233)有关的功能,以使信息处理装置3中的控制部32具有该功能。即,通过测量装置2中的通信部21,对象信息经由网络从测量装置2中的通信部21被发送至信息处理装置 3,且信息处理装置3中的控制部32可以基于这样的对象信息和存储在存储部31中的指令信息来测量反射特性。
第三,可以将事先获取的对象信息在事后读取至测量装置2中,以测量对象物S的反射特性。在这种情况下,可以经由在第1节中描述的通信部21将对象信息发送至测量装置2,也可经由所谓的闪存(例如SD存储卡、USB存储器、存储盘、智能介质、CF卡等)读取至测量装置2中。此外,作为对象信息,可以读取对象信息中所包含的参数,也可以读取间接包含这些参数的数据(例如图像文件等)。当然,在这种情况下应当注意的是,光源24 和光检测部25在测量装置2中不是必须构成要素。
7.运用了光泽计或色度计的实施例
在本节中,将对使用了光泽计或色度计作为测量装置2的实施例进行详细说明。
7.1以光泽计推定单色BRDF
测量装置2(光泽计)测量对象物S的″光泽度″,然后将其转换为反射特性的″BRDF″。根据JIS标准,在折射率为1.567的玻璃表面上,当入射角为60度时,反射率10%定义为光泽度100%;当入射角为20度时,反射率5%定义为光泽度100%。即,应当注意的是光泽度是取决于反射率的物理量。因此,理论上可以根据已知对象物S的光泽度以线性关系来计算作为反射特性的BRDF。
图10A和10B的曲线图示出了由测量装置2(光泽计)测量的对象物S的光泽度(如上所述,由于光泽度是取决于反射率的物理量,因此图10A的纵轴相当于光泽度,即可以用光泽度代替),并显示BRDF的分布。在此,示出了当入射光L_i以20度入射时,对于每个反射角(反射角的受光角度依赖性)的反射光L_o的分布。此外,每个曲线图的A~E分别涉及对象S为皮革A、中光泽塑料B、低光泽塑料C、高光泽砖D和低光泽砖E的情况。通过这样的结果,可以确认BRDF分布的广度相较于由光泽计测量的光泽度的分布的广度更广。这是根据测量装置(光泽计)中的光检测部25和测量了作为指令信息的反射特性(BRDF) 的传感器(未图示)的不同而推测出来的。因此,使用支持向量机(SVM)等为首的机器学习(权利要求范围中″第1机器学习″的一例)来学习从光泽度到BRDF(权利要求范围中″部分反射特性″的一例)的转换,并在此基础上创意筹划以获得BRDF的分布。特别是考虑到分布的广度时,例如优选为生成能够从图10A中横轴上的15~25度的光泽度分布来推定图10B中横轴上的5~35度的BRDF值的机器学习模型。
即,输入光泽度,将以BRDF作为输出进行的转换(如本节中所述说明)与输入该BRDF 并将对象物S整体BRDF(Full BRDF)作为输出进行的转换(在第1~5节中将其作为″反射特性″的高级概念化进行了说明)进行组合,由此测量光泽度并获得整体BRDF(FullBRDF)。由此,如变形例所说明的,可将其应用于不同物体的计算机图形的渲染以具有对象物S的BRDF。
图11A~图11C示出了测量对象物S的光泽度并推定整体BRDF(Full BRDF)且作为不同物体的计算机图形(斯坦福兔子)输出的示例。由于光泽计无法取得颜色信息,因此进行了各种无色实验。无论何种场合,都可从对象物S的光泽度推定整体BRDF(Full BRDF),且能够将其作为适用于计算机图形的斯坦福兔子进行输出。
7.2使用了色度计的颜色信息复原
在图10A中,当参照例如横轴上的20度附近时,由于自然地进行了正反射(镜面反射),因此,由各材料A~E形成的每个对象物S在每个位置都具有反射峰。另一方面,当参照15 度附近时,确认了由各材料A~E制成的每个物体S的光泽度都已下降至接近0的值。即,在 15度的区域(漫反射成分)中,如同20度的区域(镜面反射成分)一样几乎看不到光泽,但人们反而将其视为颜色。因此,如上所述,如果能够生成可根据图10A中横轴的15~25 度的光泽度的分布来推定图10B中横轴的5~35度的BRDF值的机器学习模型,则有望能够在生成计算机图形时复原颜色信息。
因此,再次使用测量装置2作为光泽计和色度计进行了实验,其结果如图12所示。通过使用测量装置2(光泽计)测量对象物S来测量光泽度,并输出使用由此推定的整体BRDF(Full BRDF)复原其单色反射特性的斯坦福兔子。从这里提取出漫反射成分,并且通过适用与计算机图形等有关的现有算法,将另由测量装置2(色度计)测量的颜色输出包括对象物S的颜色信息在内的斯坦福兔子。
7.3总结
由此,通过组合现有的光泽计和色度计以构成测量装置2,可执行不同物体的计算机图形的渲染以具有对象物S的反射特性。应当注意这仅是实验,且更优选能够同时进行光泽度和颜色两者测量的测量装置2的新实验。
即,以下几点需要注意。控制部23构成为基于对象物S的光泽度测量反射特性。控制部23通过输入了光泽度的第1机器学习来推定测量作为反射特性的一部分的部分反射特性,通过输入了部分反射特性的第2机器学习来推定测量反射特性。所述反射特性包含了表示光泽的镜面反射(例如正反射)成分和颜色关联的漫反射成分。
8.结论
如上所述,根据本实施例,可以实施比以往更高速和更高精确度地测量期望对象物的反射特性的测量装置2。
所述测量装置2具有控制部23,控制部23构成为基于对象信息和指令信息来测量对象物S的反射特性,对象信息是包含与入射光L_i的光源位置、反射光L_o的光检测位置和对象物S中的测量部位Sp的坐标位置关系以及入射光L_i和反射光L_o有关数值的信息,入射光L_i是被照射至测量部位Sp的光,反射光L_o是入射光L_i被照射至测量部位Sp且之后从该测量部位Sp反射出的光,指令信息是与反射特性的已知测量结果有关的信息,对象信息所包含的坐标位置关系的组合数为1~15。
以外,还可以实施能够比以往更加高速地测量期望对象物的反射特性的测量系统1。
所述测量系统1具有测量装置2和信息处理装置3,测量装置2具备光源24和光检测部 25,光源24向对象物S的测量部位Sp照射入射光L_i,光检测部25构成为检测由入射光L_i 被照射至测量部位Sp然后从所述测量部位Sp反射的反射光L_o,测量装置2以及信息处理装置3中的至少一方还具备控制部23/32,控制部23/32构成为基于对象信息和指令信息来测量对象物S的反射特性,对象信息是包含与光源24、光检测部25和测量部位Sp的坐标位置关系以及入射光L_i和反射光L_o有关数值的信息,指令信息是与反射特性的已知测量结果有关的信息,对象信息所包含的坐标位置关系的组合数为1~15,测量装置2以及信息处理装置3构成为经由网络彼此发送和接收对象信息、指令信息以及包含反射特性的信息中的至少一个。
然后,将能够比以往更加高速地测量期望对象物的反射特性的测量装置2作为硬件实施的软件也可以作为程序来实施。因而,这样的程序可以作为由计算机读取的非暂时存储介质(Non-transitory Computer Readable Medium)进行提供,也可以由外部服务器下载提供,还可以由外部计算机启动该程序,在客户终端上执行能够实现各个功能的所谓云计算。
这种测量程序使计算机执行规定功能,规定功能具备测量功能,通过测量功能,基于对象信息和指令信息来测量对象物的反射特性,对象信息是包含入射光L_i的光源位置、反射光L_o的光检测位置和对象物S的测量部位Sp的坐标位置关系以及入射光L_i和反射光L_o有关数值的信息,入射光L_i是被照射至测量部位Sp的光,反射光L_o是由入射光L_i被照射至测量部位Sp然后从所述测量部位Sp反射的光,指令信息是与反射特性的已知测量结果有关的信息,对象信息所包含的坐标位置关系的组合数为1~15。
进而,通过运用测量装置2和测量系统1,还可以实施比以往更加高速和高精确度地测量期望对象物的反射特性的测量方法。
这种测量方法具备光照射步骤S1、光检测步骤S2和测量步骤S3,光照射步骤S1向对象物S的测量部位Sp照射入射光L_i,光检测步骤S2检测由入射光L_i被照射至测量部位Sp 然后从所述测量部位Sp反射的反射光L_o,测量步骤S3基于与入射光L_i的光源位置、反射光L_o的检测位置和测量部位Sp的坐标位置关系、入射光L_i以及反射光L_o有关的数值、以及反射特性的已知测量结果来测量对象物S的反射特性,坐标位置关系的组合数为1~15。
最后,虽已对本发明所涉及的种种实施例进行了说明,但这些实施例仅作为示例提出,并不用以限制本发明的范围。本发明还可通过其他各种实施例来实现,凡是在本发明的精神和原则之内,所作的任何省略、修改、等同替换、改进等,均应包含在本发明的保护范围之内。相关实施例或变形例不仅应包含在本发明的范围或主旨中,还应包含在权利要求范围所记载的发明及其均等范围之内。
符号简单说明
1:测量系统
2:测量装置
20:通信回路
21:通信部
22:存储部
23:控制部
231:光源点灯部
232:反射特性推定部
233:渲染部
24:光源
24a:光源
24b:光源
24c:光源
24d:光源
24e:光源
24f:光源
25:光检测部
25a:光检测部
25b:光检测部
25c:光检测部
25d:光检测部
26:表示部
3:信息处理装置
31:存储部
32:控制部
L_i:入射光
L_o:反射光
- 道路地物测量装置、地物识别装置、道路地物测量方法、道路地物测量程序、测量装置、测量方法、测量程序、测量位置数据、测量终端装置、测量服务器装置、作图装置、作图方法、作图程序以及作图数据
- 测量装置、测量系统、测量程序以及测量方法