一种状态识别方法
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及建筑施工技术领域,特别是涉及一种用于识别自卸车车厢状态的方法、装置及系统。
背景技术
建筑垃圾/渣土运输计量工作现在全国推广,即自卸车从工地装土,到弃土场卸土,装土的时候需要自卸车车厢平放,卸土的时候需要自卸车车厢举升,需要准确判断车厢的平放/举升状态,防止装土/卸土过程中发生意外,同时降低生产成本,提高工作效率。
目前,现有拍摄模块一般安装在车厢顶部,面向车厢内部,这样设置的拍摄模块拍摄过程中特征不明显,准确度较低;大部分自卸车还需要安装遮挡板,防止拍摄模块由雨水、尘土造成损坏,造成了成本的增加。
因此,提供一种特征更加明显,判断车厢状态更加准确,降低了成本的一种状态识别方法、装置及系统是本领域技术人员亟待解决的问题。
发明内容
本发明的目的在于提供一种状态识别方法,该方法简单、有效,拍摄过程中特征采集更加明显,判断准确度更加精确;基于该方法的装置成本更为低廉。
基于以上目的,本发明提供的技术方案如下:
一种状态识别方法,用于识别自卸车货厢状态,其特征在于,包括如下步骤:
获取当前状态下拍摄图像;
从所述拍摄图像中选取标志物;
获取所述标志物在所述拍摄图像中的位置;
获取所述标志物在所述拍摄图像中的面积占比;
判断所述标志物是否达到预设位置,若是,判断所述面积占比是否大于第一阈值,若所述标志物面积大于第一阈值,则认定自卸车货厢处于举升状态;若所述标志物面积不大于第一阈值,则认定自卸车货厢处于平放状态;
其中,所述拍摄图像由安装在自卸车货厢底部的摄像模块拍摄。
优选地,所述标志物具体为所述拍摄图像中自卸车货厢底部。
优选地,所述预设位置具体为自卸车货厢底部在自卸车处于举升或平放状态时,在拍摄图像中所处的位置。
优选地,获取所述标志物在所述拍摄图像中的面积占比具体为:
提取所述拍摄图像中自卸车货厢底部特征像素点;
获取所述特征像素点所在具体位置;
根据所述特征像素点具体位置的集合,计算所述自卸车货厢底部在所述拍摄图像中的面积占比。
优选地,获取所述第一阈值包括如下步骤:
获取多个平放状态下自卸车货厢底部图像样本;
训练所述图像样本,获取平放状态下所述自卸车货厢底部图像面积;
根据平放状态下所述自卸车货厢底部图像面积,确定所述自卸车货厢底部面积占比阈值作为第一阈值。
优选地,还包括判断所述面积占比与所述第一阈值和第二阈值之间的大小关系,
若所述面积占比小于所述第一阈值,则认定自卸车货厢处于平放状态;
若所述面积占比大于所述第一阈值且小于所述第二阈值,则认定自卸车货厢处于举升状态;
若所述面积占比大于所述第二阈值,则认定自卸车货厢处于异常状态。
优选地,获取当前状态下拍摄图像之前,还包括如下步骤:
获取自卸车当前速度与位置;
判断当前所述位置是否与预设位置相同,若不同,停止执行获取当前状态下拍摄图像并移动自卸车至所述预设位置;
若相同,判断当前速度是否为0,若不为0,停止执行获取当前状态下拍摄图像并使自卸车速度降为0。
一种状态识别装置,包括,
拍摄模块,安装在自卸车车厢底部,用于获取当前状态下图像;
选取模块,用于选取所述图像中像素点明显的标志物;
计算模块,用于计算所述标志物在拍摄图像中的面积占比;
设置模块,用于确定并设置所述标志物面积占比阈值作为第一阈值;
判断模块,用于判断所述标志物在拍摄图像中的位置是否达到预设位置和判断所述标志物在拍摄图像中的面积占比是否大于第一阈值。
一种计算机存储介质,所述计算机存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一所述的状态识别方法。
本发明所提供的一种状态识别方法,用于识别自卸车货厢处于平放和举升状态,通过获取自卸车货厢当前状态下拍摄图像,在该图像中选取合适的标志物,确定标志物在图像中的位置是否在预设位置,若是,再通过计算得出标志物在图像中的面积占比,判断标志物在图像中的面积占比是否大于预设的第一阈值,从而确定自卸车货厢处于平放或举升状态。本技术方案,仅需选取当前状态下拍摄图像中合适的标志物,确认该标志物处于预设位置后,计算标志物在图像中面积占比,并预设第一阈值,即可判断当前自卸车货厢状态,计算过程快速高效、判断结果准确无误,提高了施工效率,同时基于该方法的装置成本更加低廉。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
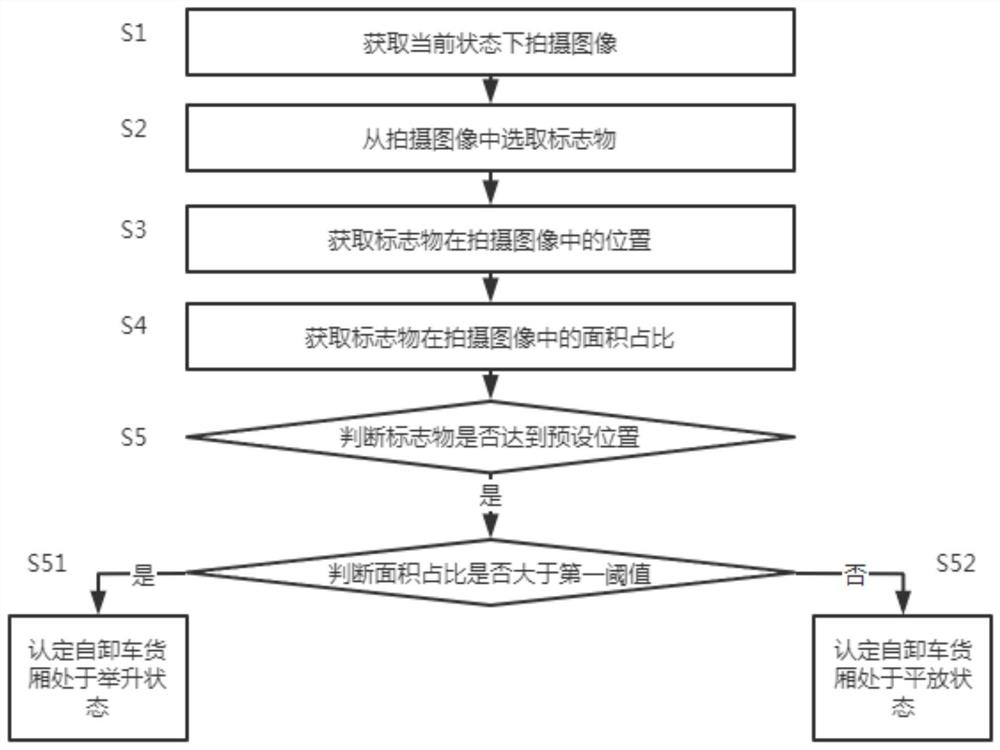
图1为本发明提供的一种状态识别方法的流程图;
图2为本发明实施例提供的步骤4具体流程图;
图3为本发明实施例提供的获取第一阈值的流程图;
图4为本发明实施例提供的一种状态识别方法的具体流程图;
图5为本发明实施例提供的一种状态识别装置的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例采用递进的方式撰写。
本发明实施例提供了一种状态识别方法。主要解决现有技术中,拍摄模块在拍摄过程中特征不明显、准确度较低,增加了成本的技术问题。
如图1,一种状态识别方法,用于识别自卸车货厢状态,包括如下步骤:
S1.获取当前状态下拍摄图像;
S2.从拍摄图像中选取标志物;
S3.获取标志物在拍摄图像中的位置;
S4.获取标志物在拍摄图像中的面积占比;
S5.判断标志物是否达到预设位置,若是,S51.判断面积占比是否大于第一阈值,若标志物面积大于第一阈值,则认定自卸车货厢处于举升状态;S52.若标志物面积不大于第一阈值,则认定自卸车货厢处于平放状态;
其中,拍摄图像由安装在自卸车货厢底部的摄像模块拍摄。
本发明所提供的一种状态识别方法,用于识别自卸车货厢处于平放和举升状态,通过获取自卸车货厢当前状态下拍摄图像,在该图像中选取合适的标志物,确定标志物在图像中的位置是否在预设位置,若是,再通过计算得出标志物在图像中的面积占比,判断标志物在图像中的面积占比是否大于预设的第一阈值,从而确定自卸车货厢处于平放或举升状态。本技术方案,仅需选取当前状态下拍摄图像中合适的标志物,确认该标志物处于预设位置后,计算标志物在图像中面积占比,并预设第一阈值,即可判断当前自卸车货厢状态,计算过程快速高效、判断结果准确无误,提高了施工效率,同时基于该方法的装置成本更加低廉。
优选地,标志物具体为拍摄图像中自卸车货厢底部。
实际运用过程中,选取自卸车货厢底部作为标志物。拍摄模块在自卸车平放状态和举升状态下拍摄的图像中,自卸车货厢底部在该图像中易于获取,便于计算。
优选地,预设位置具体为自卸车货厢底部在自卸车处于举升或平放状态时,在拍摄图像中所处的位置。
实际运用过程中,自卸车处于举升或平放状态时,根据之前拍摄的图像样本,确定自卸车货厢底部在其中的位置。
优选地,步骤S4具体为:
A1.提取拍摄图像中自卸车货厢底部特征像素点;
A2.获取特征像素点所在具体位置;
A3.根据特征像素点具体位置的集合,计算自卸车货厢底部在拍摄图像中的面积占比。
实际运用过程中,可根据需要选取自卸车货厢底部色差较为明显的部位作为特征像素点;确定特征像素点的在3D视图中的具体位置;3D视图中特征像素点的位置,计算自卸车货厢底部的面积,将该面积除以拍摄图像的面积得出面积占比。
优选地,获取第一阈值包括如下步骤:
B1.获取多个平放状态下自卸车货厢底部图像样本;
B2.训练图像样本,获取平放状态下自卸车货厢底部图像面积;
B3.根据平放状态下自卸车货厢底部图像面积,确定自卸车货厢底部面积占比阈值作为第一阈值。
实际运用过程中,获取多个自卸车平放状态图像样本,采用AI技术多次训练图像样本,获取平放状态下自卸车底部图像面积,根据平放状态下自卸车货箱底部图像面积,确定自卸车货厢底部面积占比阈值作为第一阈值。需要说明的是,由于车辆、路况等原因,自卸车货厢底部图像面积可能会发生变化。为更好的理解本方案,例如:在本实施例中,平放状态下自卸车货厢底部图像面积占拍摄图像面积的0-5%,即将5%作为第一阈值,自卸车货箱底部图像面积占比超过5%时,应当认定自卸车处于举升状态。
优选地,还包括S6.判断面积占比与第一阈值和第二阈值之间的大小关系,
若面积占比小于第一阈值,则认定自卸车货厢处于平放状态;
若面积占比大于第一阈值且小于第二阈值,则认定自卸车货厢处于举升状态;
若面积占比大于第二阈值,则认定自卸车货厢处于异常状态。
实际运用过程中,设立第二阈值,第二阈值与第一阈值均为自卸车货厢底部图像在拍摄图像中的面积占比。同样的,第二阈值的获取也采用与获取第一阈值的相同方法。为更好的理解本方案,例如:在本实施例中,不同程度的举升状态下自卸车货厢底部图像面积占拍摄图像面积的5-90%,即将90%作为第二阈值,自卸车货厢底部面积占比小于5%时,自卸车处于平放状态;自卸车货厢底部面积占比处于5%-90%之间时,自卸车处于举升状态;自卸车货厢底部面积占比大于90%时,自卸车处于异常状态。
优选地,步骤S1之前,还包括如下步骤:
获取自卸车当前速度与位置;
判断当前位置是否与预设位置相同,若不同,停止执行获取当前状态下拍摄图像并移动自卸车至预设位置;
若相同,判断当前速度是否为0,若不为0,停止执行获取当前状态下拍摄图像并使自卸车速度降为0。
实际运用过程中,在识别自卸车货厢状态之前,还应当判断自卸车当前速度与位置,自卸车应当停放在预设的卸土或装土位置,此时速度应为0;才可进行自卸车货厢状态识别。因此,判断自卸车位置是否与预设位置相同,不同则移动自卸车至预设位置,若相同则执行货厢状态识别;同样的判断自卸车速度是否为0,若不为0则将自卸车速度降为0,若为0则执行货厢状态识别。
一种状态识别装置,包括,
拍摄模块,安装在自卸车车厢底部,用于获取当前状态下图像;
选取模块,用于选取图像中像素点明显的标志物;
计算模块,用于计算标志物在拍摄图像中的面积占比;
设置模块,用于确定并设置标志物面积占比阈值作为第一阈值;
判断模块,用于判断标志物在拍摄图像中的位置是否达到预设位置和判断标志物在拍摄图像中的面积占比是否大于第一阈值。
实际运用过程中,拍摄模块获取当前状态下图像,该图像可以根据实际需要选取拍摄方向,如:拍摄方向可与自卸车后视镜面向方向一致,拍摄自卸车货厢底部图像;或拍摄方向与自卸车后视镜面向方向相反,拍摄驾驶室背部图像。确定标志物在图像中的位置后,选取模块选取该图像中特定的标志物,计算模块计算标志物在图像中的面积占比,根据面积占比设置标志物占比阈值作为第一阈值,通过判断模块判断面积占比是否大于第一阈值作为识别自卸车车厢举升或平放状态的条件。
一种计算机存储介质,计算机存储介质上存储有计算机程序,计算机程序被处理器执行时实现如上述任一的状态识别方法。
本实施例提供的上述计算机存储介质,由于能够执行并实现前述的状态识别方法,因此能够达到与前述方法实施例相同的技术效果。
在本申请所提供的实施例中,应该理解到,所揭露的方法和装置,可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,模块的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,如:多个模块或组件可以结合,或可以集成到另一个系统,或一些特征可以忽略,或不执行。另外,所显示或讨论的各组成部分相互之间的耦合、或直接耦合、或通信连接可以是通过一些接口,设备或模块的间接耦合或通信连接,可以是电性的、机械的或其它形式的。
另外,在本发明各实施例中的各功能模块可以全部集成在一个处理器中,也可以是各模块分别单独作为一个器件,也可以两个或两个以上模块集成在一个器件中;本发明各实施例中的各功能模块既可以采用硬件的形式实现,也可以采用硬件加软件功能单元的形式实现。
本领域普通技术人员可以理解:实现上述方法实施例的全部或部分步骤可以通过程序指令及相关的硬件来完成,前述的程序指令可以存储于计算机可读取存储介质中,该程序指令在执行时,执行包括上述方法实施例的步骤;而前述的存储介质包括:移动存储设备、只读存储器(Read On ly Memory,ROM)、磁碟或者光盘等各种可以存储程序代码的介质。
以上对本发明所提供的一种状态识别方法、装置及系统进行了详细介绍。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种汽车的拖车状态、转鼓试验状态的识别方法
- 一种安装状态识别方法、安装方法及安装状态识别装置