链式物料运输对接机器人
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及物料运输设备技术领域,具体涉及一种链式物料运输对接机器人。
背景技术
在自动化运输领域中,采用输送链应对大载荷的运输情况,输送链也应用在可行走的对接机器人上。现有的链式物料运输对接机器人包括机体、行走装置和链输送机构,行走装置设置在机体的底部,链输送机构设置在机体的上部。链式物料运输对接机器人的电控装置、电池以及其他装置设置在机体的内部空间中,内部空间位于链输送机构的下方且内部空间的空间入口朝上。
现有的链式物料运输对接机器人存在的问题是,为便于检修,空间入口不作遮挡,此设置使电控装置、电池和其他装置得不到保护;若在输送链下方设置遮挡件以保护内部装置,则存在拆装困难的问题。
发明内容
本发明的目的在于提供一种便于检修且有效保护内部装置的链式物料运输对接机器人。
本发明提供的链式物料运输对接机器人包括机体和行走装置,行走装置设置在机体的底部;链式物料运输对接机器人还包括链式输送装置;链式输送装置沿第一轴心可转动地安装在机体的上部,第一轴心的延伸方向垂直于链式输送装置的运输方向;机体内设有内部空间,机体在内部空间的上方设有内部空间的空间入口;链式输送装置可沿第一轴心从遮挡位置摆动至上翻位置,处于遮挡位置的链式输送装置遮挡空间入口,处于上翻位置的链式输送装置解除对空间入口的遮挡。
由上述方案可见,链式输送装置以可上翻掀开的形式安装到机体的上部,链式输送装置可以在链输送机构的底部固定设置底板,当链式输送装置处于遮挡位置,底板则对空间入口进行有效的密封遮挡,从而对内部装置有效保护;当需要检修内部设备时,掀开链式输送装置即可使内部空间外露,从而便于工作人员进行检修工作。
进一步的方案是,链式输送装置包括第一传动轴、第二传动轴和设置在第一传动轴与第二传动轴之间的至少两组链输送机构;第一传动轴设置在第一轴心处。
由上可见,第一传动轴实现链输送机构的传动,第一传动轴设置在第一轴心处,链式输送装置的上摆轴心也位于第一轴心处,此设置使链式输送装置的上摆可在不拆卸链输送机构且不影响链输送机构的前提下进行,降低检修操作难度,进一步便于工作人员进行检修工作。
更进一步的方案是,链式物料运输对接机器人还包括运输驱动单元和传动机构;运输驱动单元设置在内部空间中,传动机构设置在运输驱动单元与第一传动轴之间。
由上可见,由于掀动链式输送装置不改变第一传动轴的位置,即第一传动轴的位置相对于机体固定,因此运输驱动单元设置在内部空间中使布置更合理,同时运输驱动单元得到遮挡保护,还减小了链式物料运输机器的体积。
进一步的方案是,链式输送装置包括底板和至少两个连接架,运输方向上,第一传动轴和第二传动轴分别转动连接在连接架的延伸两端,底板连接在多个连接架的下侧;链式输送装置处于遮挡位置时,底板遮挡空间入口。
由上可见,底板不但对内部空间进行有效的遮挡,底板整体位于输送链的下方,其拆装不与链输送机构产生干涉,具有易拆装的特点。
进一步的方案是,连接架包括沿运输方向延伸的水平板和两道侧挡板;链输送机构包括第一链轮、第二链轮和输送链,第一链轮安装在第一传动轴上,第二链轮安装在第二传动轴上,输送链连接在第一链轮与第二链轮之间;在第一轴心的延伸方向上,第一链轮、第二链轮以及输送链均设置在两道侧挡板之间;在垂向上,输送链的链条下部位于水平板与底板之间,输送链的链条上部位于水平板的上方。
由上可见,连接架和底板的配合下,仅输送链的链条上部处于外露状态,其余部分均得到连接架和底板的遮挡保护,延长链输送机构的寿命,保证链输送机构的运作稳定性。
进一步的方案是,水平板上设置有第一限位件,底板上设置有第二限位件;在第一轴心的延伸方向上,第一限位件对链条上部限位,第二限位件对链条下部限位。
由上可见,此设置能减小输送链的振动,有效提高链输送机构的稳定性。
进一步的方案是,在运输方向上,第二传动轴在连接架上的安装位置可调。
由上可见,此设置使输送链能被调整至一个合适的张紧状态,提高运输时的稳定性。
进一步的方案是,链式输送装置包括三组链输送机构。
由上可见,此设置使链式物料运输对接机器人适应于对不同宽度的载具或货物进行运送,适用性提高,同时提升承载能力。
进一步的方案是,机体上设有导向侧壁,导向侧壁高于处于遮挡位置的链式输送装置,两道导向侧壁分别位于链式输送装置的两侧;两道导向侧壁之间形成沿运输方向延伸的运输通道。
更进一步的方案是,链式物料运输对接机器人还包括设置在导向侧壁上的对射传感器,运输通道位于对射传感器的检测范围内。
由上可见,此设置使进入运输通道的货物得到有效的引导,保证对接效果;到达运输通道的货物还将被检测,从而使系统完成货物位置判断,进而使后续的自动化运输步骤有效进行。
附图说明
图1为本发明链式物料运输对接机器人第一实施例的结构图。
图2为本发明链式物料运输对接机器人第一实施例隐藏部分部件的结构图。
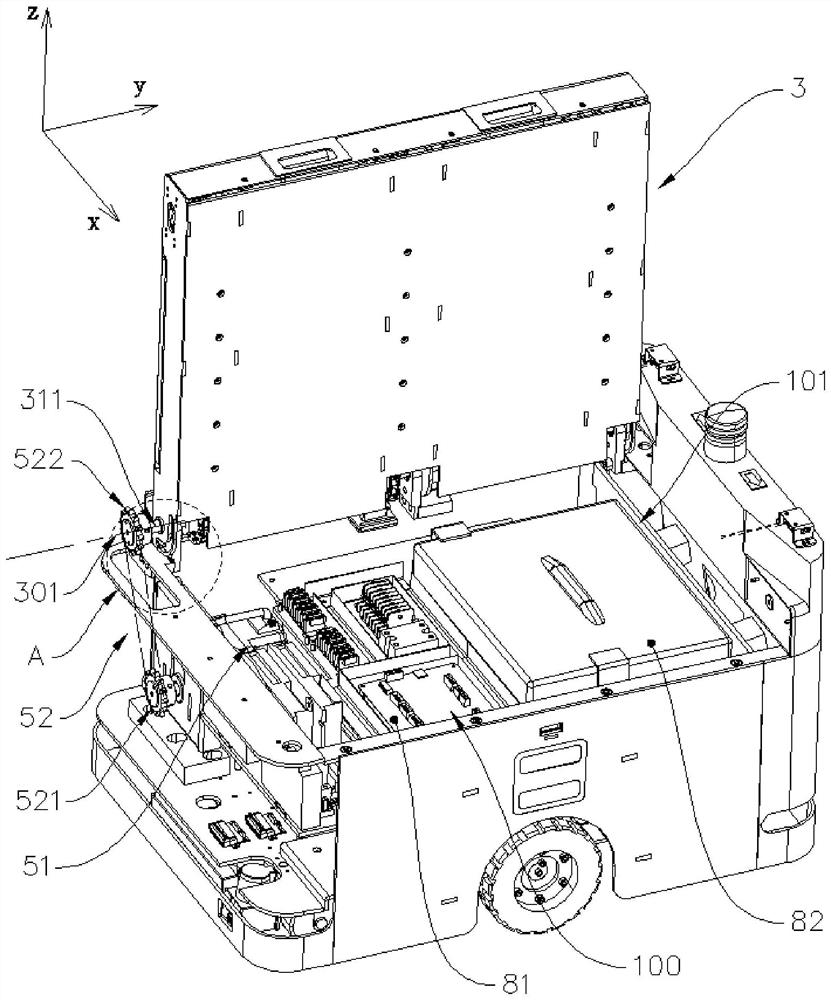
图3为本发明链式物料运输对接机器人第一实施例链式输送装置处于上翻位置的结构图。
图4为本发明链式物料运输对接机器人第一实施例中链式输送装置的结构分解图。
图5为本发明链式物料运输对接机器人第一实施例中连接架和链输送机构的结构分解图。
图6为图3中A处的放大图。
图7为本发明链式物料运输对接机器人第二实施例中链式输送装置的结构示意图。
具体实施方式
链式物料运输对接机器人第一实施例
参见图1至图3,本发明提供的链式物料运输对接机器人为一种对接机器人,其上方设置有沿运输方向(图示x轴方向)贯通的运输通道300。链式物料运输对接机器人主要包括机体1、行走装置2、链式输送装置3、内部装置81、电池82和对射传感器9。行走装置2设置在机体1的底部,行走装置2包括差速驱动装置,机体1的底部还设置有万向轮组。链式输送装置3则位于机体1的上部,链式输送装置3包括位于运输通道300下方的三组链输送机构4,链输送机构4沿x轴方向延伸,三组链输送机构4之间沿y轴方向依次布置。
从图3可见,链式输送装置3沿第一轴心301可转动地安装在机体1上。由于第一轴心301位于链式输送装置3的侧部,当链式输送装置3沿第一轴心301转动后,链式输送装置3即相对于机体1向上摆动或向下摆动。图3中的链式输送装置3处于上翻位置,此时机体1的内部空间100外露,内部装置81和电池均82均安装在机体1的内部空间100内,机体1在内部空间100的上方设有内部空间100的空间入口101,当链式输送装置3处于上翻位置,工作人员可以通过空间入口101对内部装置81和电池82进行检修。再参见图1,图1中的链式输送装置3处于遮挡位置,链式输送装置3可沿第一轴心301转摆于上方位置与遮挡位置之间,当链式输送装置3处于遮挡位置,链式输送装置3则处于水平状态,即运输工作状态,且此时链式输送装置3从上方遮挡空间入口101。
参见图4,链式输送装置3包括第一传动轴311、第二传动轴312、三组链输送机构4、三个连接架32、底板33和盖板34。三个连接架32沿y轴方向依次设置,连接架32沿x轴方向延伸成长形,第一传动轴311和第二传动轴312分别可转动地安装在连接架32的延伸两端,且第一传动轴311和第二传动轴312均穿过该三个连接架32。
三组链输送机构4各与一个连接架32配合。连接架32包括沿x轴方向延伸的水平板321和两道侧挡板322,侧挡板322从水平板321上弯折伸出,且侧挡板322垂直于水平板321。在水平板321的下方、两道侧挡板322之间形成保护空间320。
在x轴方向上,侧挡板322的第一端安装有固定设置的第一轴承座361,第一传动轴311与第一轴承座361上的轴承配合以可转动地安装在侧挡板322上;侧挡板322的第二端设置有第二轴承座362,第二轴承座362通过一个具有长形螺栓孔350的连接板35安装到侧挡板322上,因此,第二轴承座362在x轴方向上的位置可调,第二传动轴312与第二轴承座362上的轴承配合以可转动地安装在侧挡板322上。
链输送机构4包括第一链轮41、第二链轮42和输送链43,第一链轮41安装在第一传动轴311上,第二链轮42安装在第二传动轴312上,输送链43连接在第一链轮41与第二链轮42之间。在第一轴心301的延伸方向上,第一链轮41、第二链轮42以及输送链43均设置在两道侧挡板322之间。在垂向上,输送链43的链条下部432位于保护空间320内,且当底板33安装到连接架3的下侧后,底板33从下方遮挡链条下部432,而输送链43的链条上部431位于水平板321的上方。
再结合图4和图5,底板33可拆卸地安装在三个连接架32的下侧,盖板34可拆卸地安装在三个连接架32的上侧。侧挡板322的底部设置有多个卡合凸起323,底板33上设置有多个卡合孔331,卡合凸起323可插装到卡合孔331中。
水平板321上安装有第一限位件61,底板33上安装有第二限位件62,第一限位件61和第二限位件62均呈细长状并均沿x轴方向延伸,第一限位件61和第二限位件62在x轴方向上的截面均呈“凸”状,第一限位件61上具有向上凸起的第一限位部610,第二限位件62上具有向上凸起的第二限位部620。由于输送链43在x轴方向上的投影均呈“H”状,因此无论是链条上部431的下侧或是链条下部432的下侧均形成凹位,第一限位部610陷入链条上部431下侧的凹位,第二限位部620陷入链条下部432下侧的凹位,从而在y轴方向上限制输送链43摆动,保证输送链43的稳定性。
在x方向上的,侧挡板322的前端设置有连接座328,盖板34的前端具有前侧挡板部349,螺丝可穿过前侧挡板部349的通孔后与连接座328上的螺孔配合。盖板34上形成三道长形缺口341,链条上部431从长形缺口341处凸起于盖板34之外。另外,前侧挡板349上还安装有两个提手件342,以便于工作人员提起链式输送装置3。
链式输送装置3的上下摆动不影响链输送机构4的传动。参见图2、图3和图6,链式物料运输对接机器人还包括运输驱动单元51和传动机构52,运输驱动单元51设置在内部空间100中,驱动单元51为驱动电机,传动机构52为链传动机构,传动机构52设置在机体1上但位于内部空间100之外,传动机构52包括主动轮521、从动轮522和传动链(图中未示出),驱动单元51的输出轴穿出机体1的壳体面板后与主动轮521连接,从动轮522安装在第一传动轴311上。驱动单元51启动并通过传动机构52带动第一传动轴311转动,即可带动三组链输送机构4运作。
另外,机体1还包括连接座121,第一传动轴311可转动地依次穿过侧挡板322和连接座121。连接座121上具有沿y轴方向凸起的限位销122,侧挡板322上还在第一传动轴311的外周设置有沿y轴方向贯穿且沿弧线延伸的弧线槽329,限位销122位于弧线槽329内,限位销122与弧线槽329配合能使链式输送装置3的摆动幅度限制在大约90度,即链式输送装置3能从水平的遮挡位置向上摆动至竖直的上翻位置。由于链输送机构4由第一传动轴311传动,连接架32与第一传动轴311转动连接,因此,链式输送装置3上下摆动时,相当于链输送机构4整体沿第一传动轴311相对于第一传动轴311,因此,链式输送装置3的上下摆动不会对运输驱动单元51、传动机构52和链输送机构4的传动造成影响。
链式输送装置3以可上翻掀开的形式安装到机体1的上部,底板33固定设置在链式输送装置3的底部,当链式输送装置3处于遮挡位置,底板33则对空间入口101进行有效的密封遮挡,从而对内部装置有效保护;当需要检修内部设备时,掀开链式输送装置3即可使安装空间100外露,从而便于工作人员进行检修工作。另外,底板33整体位于输送链43的下方,其拆装不受链输送机构4的干涉,具有易拆装的特点。
另外,再参见图1,机体1上设有导向侧壁19,导向侧壁19高于处于遮挡位置的链式输送装置3,两道导向侧壁19分别位于链式输送装置3的两侧,运输通道300位于两道导向侧壁19之间。两组对射传感器9在x轴方向上一次设置在导向侧壁19上,运输通道300位于对射传感器9的检测范围内,两组对射传感器9分别用于对货物的进入和送出进行位置检测。
链式物料运输对接机器人第二实施例
参见图7,在本实施例中,第一传动轴991不设置在第一轴心901处,第一轴心901处设置第三传动轴993,第一传动轴993与第三传动轴991之间设置第二传动机构91,第二传动机构91为传动齿轮组。
另外,本实施例中,在第一传动轴991与第二传动轴992之间仅设置了两组链输送机构92。另外,第二传动机构还可以是链传动机构或带传动机构。
本实施例也能使链式输送装置3的上下摆动不会对链输送机构4的传动造成影响。
在其他实施例中,链式输送装置不具有如第一实施例中的底板,而机体具有可拆卸地安装在空间入口处的盖体,使链式输送装置到达上翻位置后,工作人员掀开盖体后可使内部空间外露。
在其他实施例中,运输驱动单元和传动机构设置在链式输送装置中。在垂直于输送方向的水平方向上,链输送机构之间具有一定的空间,可选用体积较小的运输驱动单元和传动机构,并将运输驱动单元和传动机构设置在链输送机构之间的空间中。
最后需要强调的是,以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种变化和更改,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 链式物料运输对接机器人
- 链式物料运输对接机器人