液剂残量侦测机构、液剂自动投入装置、以及洗衣机
文献发布时间:2023-06-19 11:14:36
技术领域
本发明关于侦测洗涤剂、柔软剂等的液剂的残量的液剂残量侦测机构、以及在洗涤时进行液剂的自动投入的液剂自动投入装置以及洗衣机。
背景技术
在专利文献1,公开包括洗涤剂自动投入装置(液剂自动投入装置)的洗衣机。洗涤剂自动投入装置是在洗涤剂槽预先收容洗涤剂(液体洗涤剂),且在既定的时机从洗涤剂槽将洗涤剂往洗衣槽自动投入。在包括如此的洗涤剂自动投入装置的洗衣机中,用户无需在每次洗涤时计算既定量的洗涤剂而投入。然而,若用户忘记往洗涤剂槽补充洗涤剂,洗涤剂槽内的洗涤剂用完,则可能发生未投入洗涤剂就进行洗涤的情形。
在专利文献1,公开进行洗涤剂自动投入装置的洗涤剂的残量侦测,若洗涤剂槽内的洗涤剂残量变少,则提示用户补充洗涤剂。
现有技术文献
专利文献
专利文献1:日本公开特许公报“特开2018-126287号”
发明内容
本发明所要解决的技术问题
在以往的洗涤剂自动投入装置中,可想到一般是从洗涤剂槽往洗衣槽的洗涤剂的投入由送液泵进行,被投入的洗涤剂量的调整由送液泵的驱动时间的控制进行。
然而,在由本案发明者们的研究中,洗涤剂槽中的洗涤剂的残量可能极大地影像被投入的洗涤剂量(投入量)。具体来说,会有即便送液泵的驱动时间为相同,在洗涤剂槽的洗涤剂的残量为多的情况投入量变多,洗涤剂的残量为少的情况投入量也变少的倾向。这可能是因为,例如,送液泵不具有用于在停止时抵抗施加到吸入口的水压来抑制流出的构造等。此情况,根据洗涤剂槽的洗涤剂的残量,送液泵的每单位时间的吐出量会变化。例如,在洗涤剂的残量为多的情况,可想到洗涤剂槽的洗涤剂的液面水位高,对送液泵的吸入口施加的液压变大,送液泵的每单位时间的吐出量增加。
因此,不论洗涤剂槽的洗涤剂残量如何,为了始终投入适当的量的洗涤剂,可想到进行洗涤剂槽内的洗涤剂的残量侦测,根据侦测到的洗涤剂残量而进行投入量的调整。在专利文献1中,虽然有公开侦测洗涤剂槽内的洗涤剂残量,但是由于此侦测是为了提醒用户补充洗涤剂,因此只进行洗涤剂槽快要变空的时候的残量侦测(以下,空侦测),作为用于进行投入量的调整的残量侦测并不充分。
进行与洗涤剂残量相应的投入量的调整,在较空侦测之前的阶段的残量侦测成为必要。即,若也包含空侦测,则需要进行多阶段(至少2阶段以上)的残量侦测。在以往,在洗涤剂自动投入装置中没有进行多阶段的残量侦测的部件,无法根据洗涤剂残量而进行调整洗涤剂的投入量。
本发明是鉴于上述问题而完成,其目的在于提供可由简单的构成多阶段地进行液剂槽内的液剂(液体洗涤剂、柔软剂)的残量侦测的液剂残量侦测机构。进一步,其目的在于提供使用此液剂残量侦测机构而可进行适当的量的液剂自动投入的液剂自动投入装置以及洗衣机。
解决问题的方案
为了解决上述的课题,本发明的第一的方案的液剂残量侦测机构,侦测洗衣机所包括的液剂槽内的液剂的残量,其包括:已安装有永久磁铁的浮起部件,根据所述液剂槽的液面水位的变化移动;以及霍尔传感器,配置于所述液剂槽的侧面外侧,根据所述永久磁铁的移动而变化输出值;其中所述永久磁铁以及所述霍尔传感器的至少一方包括多个,基于所述霍尔传感器的输出值的变化,可侦测所述液剂槽的多阶段的液面水位。
根据上述的构成,通过已设置在浮起部件的永久磁铁与霍尔传感器,可由简单的构成多阶段地进行液剂槽内的液剂(液体洗剂、柔软剂)的残量侦测。即,在有多个永久磁铁的情况,在霍尔传感器的输出中相对于侦测水位的变位在多处发生,由此能够侦测多个的液面水位。另外,在有多个霍尔传感器的情况,在每一个的霍尔传感器的输出中相对于侦测水位的变位的发生时机不同,由此能够侦测多个的液面水位。
为了解决上述的课题,本发明的第二方案的液剂残量侦测机构,侦测洗衣机所包括的液剂槽内的液剂的残量,其包括:至少一个的发光元件,配置于在所述液剂槽中对向的一对侧板的一方的外侧;以及多个的受光元件,在所述液剂槽中对向的一对侧板的另一方的外侧中,分别配置于不同的高度;其中所述受光元件,通过是否接收来自所述发光元件的光而可侦测所述液剂槽的既定的液面水位。
根据上述的构成,通过由发光元件以及受光元件构成的光传感器,可由简单的构成多阶段地进行液剂槽内的液剂(液体洗剂、柔软剂)的残量侦测。即,在受光元件接收来自发光元件的光,所述光不被液剂槽内的液剂遮断为必要,通过受光元件是否接收来自发光元件的光而能够侦测液剂槽的既定的液面水位。
为了解决上述的课题,本发明的第三方案的液剂自动投入装置,进行往洗衣机的洗涤槽的液剂的投入,其包括:液剂槽,液剂被收容;送液泵,将被收容于所述液剂槽的液剂往所述洗涤槽输送(feeding);以及驱动控制部,使所述送液泵驱动;其中所述驱动控制部是基于上述记载的液剂残量侦测机构的侦测结果调整所述送液泵的驱动时间,将液剂残量少的情况的所述送液泵的驱动时间设为比液剂残量多的情况的驱动时间长。
根据上述的构成,能够不论液剂槽的液剂残量,始终投入适当的量的液剂。即,在液剂残量少的情况,虽然施加在送液泵的吸入口的液压变小,每单位时间的送液量降低,但能够通过将送液泵的驱动时间变长而弥补。
为了解决上述的课题,本发明的第四方案的液剂自动投入装置,进行往洗衣机的洗涤槽的液剂的投入,其包括:液剂槽,液剂被收容;送液泵,将被收容于所述液剂槽的液剂,往所述洗涤槽输送;以及驱动控制部,使所述送液泵驱动;其中所述驱动控制部是基于上述记载的液剂残量侦测机构的侦测结果而调整所述送液泵的吸引力,将液剂残量少的情况的所述送液泵的吸引力设为比液剂残量多的情况的吸引力大。
根据上述的构成,能够不论液剂槽的液剂残量,始终投入适当的量的液剂。即,在液剂残量少的情况,虽然施加在送液泵的吸入口的液压变小,但能够通过将送液泵的吸引力变大而弥补。
为了解决上述的课题,本发明的第五方案的洗衣机,其包括:上述记载的液剂自动投入装置。
发明效果
本发明的液剂残量侦测机构,起到可由简单的构成多阶段地进行液剂槽内的液剂(液体洗涤剂、柔软剂)的残量侦测的效果。另外,本发明的液剂自动投入装置以及洗衣机,起到下述效果:使用此液剂残量侦测机构,由此能够不论液剂槽的液剂残量,进行适当的量的液剂自动投入。
附图说明
图1是表示适用实施方式1的液剂残量侦测机构的液剂槽的构成的分解立体图。
图2是表示图1的液剂槽的槽本体的图,(a)是俯视图,(b)是侧面图,(c)是正面图。
图3是表示图1的液剂槽的浮起部件的图,(a)为俯视图,(b)是侧面图,(c)是仰视图。
图4是表示图1的液剂槽的盖部件的图,(a)是俯视图,(b)是侧面图,(c)是仰视图。
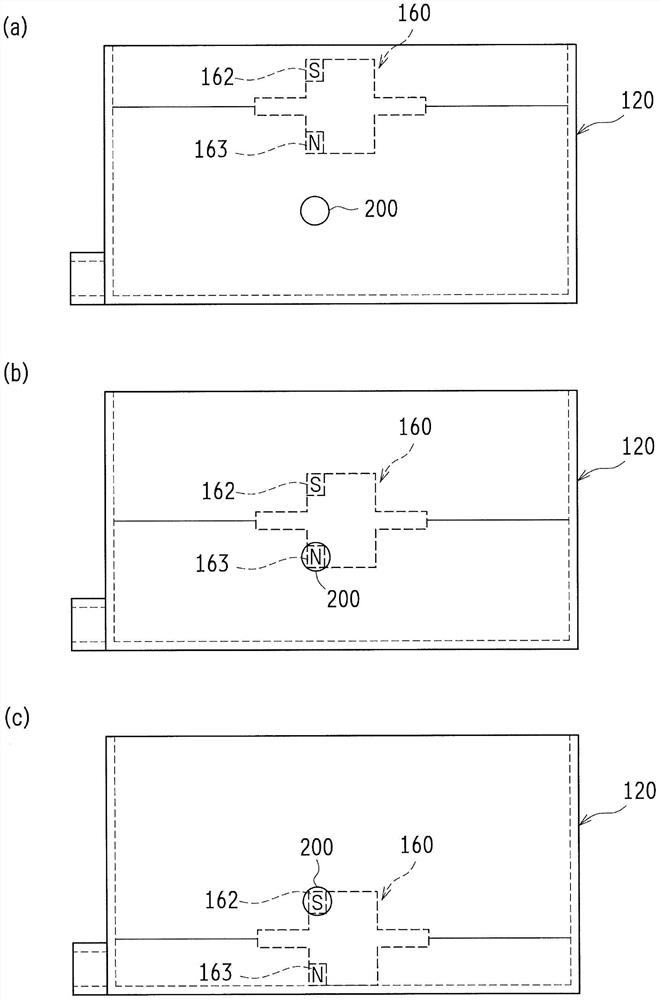
图5是表示实施方式1的液剂残量侦测机构中,与槽本体内的液剂残量相应的浮起部件与霍尔传感器的位置关系的示意图,(a)表示液剂满量时,(b)表示液剂残量大致一半时,(c)表示液剂残量接近于空时的状态。
图6是表示在图5的液剂残量侦测机构中,随着槽本体内的液剂残量的变化的霍尔传感器的输出变化的图形(gragh)。
图7是表示在实施方式1的液剂残量侦测机构的变形例中,与槽本体内的液剂残量相应的浮起部件与霍尔传感器的位置关系的示意图,(a)表示液剂满量时,(b)表示液剂残量大致一半时,(c)表示液剂残量接近于空时的状态。
图8是表示在图7的液剂残量侦测机构中,随着槽本体内的液剂残量的变化的霍尔传感器的输出变化的图形。
图9是表示实施方式2的液剂残量侦测机构中,与槽本体内的液剂残量相应的浮起部件与霍尔传感器的位置关系的示意图,(a)表示液剂满量时,(b)表示液剂残量大致一半时,(c)表示液剂残量接近于空时的状态。
图10是表示在图9的液剂残量侦测机构中,随着槽本体内液剂残量的变化的霍尔传感器的输出变化的图形,(a)表示第一霍尔传感器的输出,(b)表示第二霍尔传感器的输出,(c)表示从第一霍尔传感器的输出减去第二霍尔传感器的输出的运算结果。
图11是表示实施方式3的液剂残量侦测机构中,与槽本体内的液剂残量相应的浮起部件与霍尔传感器的位置关系的示意图,(a)表示液剂满量时,(b)表示液剂残量大致2/3时,(c)表示液剂残量大致1/3时的状态。
图12是表示在图11的液剂残量侦测机构中,随着槽本体内的液剂残量的变化的霍尔传感器的输出变化的图形。
图13是表示实施方式4的液剂残量侦测机构的示意图,槽本体与光传感器的配置关系的正面图。
图14是表示实施方式5的洗衣机的外观的立体图。
图15是表示实施方式5的液剂自动投入装置的构成的模块图。
图16是表示在将两个液剂槽相邻配置的情况下,使用了实施方式1的液剂残量侦测机构的情况的液剂槽的配置的立体图。
图17是表示在将两个液剂槽相邻配置的情况下,使用了实施方式4的液剂残量侦测机构的情况的液剂槽的配置的分解立体图。
具体实施方式
[实施方式1]
以下,针对本发明的实施方式,参照图式而详细地说明。图1是表示适用本实施方式1的液剂残量侦测机构的液剂槽100的构成的分解立体图。另外,在以下说明中,液剂是指被使用在洗衣机的洗涤的液体洗涤剂、柔软剂等的意思。
如图1所示,液剂槽100包括槽本体120、盖部件140、以及浮起部件160而构成。接着,参照图2~4,进行各部件每个构成的说明。另外,在此为了便于说明,将从箭头x方向看的图设为正面图,将从箭头y方向看的图设为侧面图。
图2是表示槽本体120的图,(a)是俯视图,(b)是侧面图,(c)是正面图。槽本体120是以在内部收容液剂的方式,被设为上面已开口的大致长方体形状的容器,从上面看的形状被设为y方向短且x方向长的、细长的长方形。
槽本体120在正面侧的宽度窄的侧板120a的下部包含液剂排出口121。即,被收容在槽本体120的液剂,能够从液剂排出口121经由送液泵、开关阀等而向洗衣机的洗涤槽供给。另外,槽本体120的内部底面也可以是以即便液剂为少量也容易地被排出的方式,被设为朝向液剂排出口121缓缓地下降的倾斜面。
进一步,在槽本体120的宽度广的侧板120b的内面侧,形成有在垂直方向(z方向)延伸设置的轨道部122。轨道部122在水平面(xy平面)的剖面是固定形状,在本例被设为T字形状剖面。
图3是表示浮起部件160的图,(a)是俯视图,(b)是侧面图,(c)是仰视图。浮起部件160被配置在槽本体120的内部,是以成为比被收容于槽本体120的液剂轻的比重的方式形成,以浮在槽本体120内的液面。另外,浮起部件160被设为在浮起本体161安装两个永久磁铁162、163的构成。
浮起本体161设为在平板部161a的上面侧以及下面侧的每一个设置有凸部161b以及凸部161c的形状。凸部161b以及凸部161c从上面侧看,以与平板部161a的一边相接的方式设置。具体来说,平板部161a、凸部161b以及凸部161c是以与槽本体120的侧板120b的对向面成为同一面的方式形成。在浮起本体161的与侧板120b的对向面,形成有用于与轨道部122嵌合的槽部164。槽部164与轨道部122同样地,在水平面(xy平面)的剖面是一定形状,在本例被设为T字形状剖面。
如上所述,由于浮起部件160成为浮在槽本体120内的液面,因此根据槽本体120内的液材的残量而移动。轨道部122以及槽部164成为引导浮起部件160的移动的引导机构。浮起部件160被轨道部122以及槽部164引导,其移动路径被限制于仅在垂直方向(z方向)。另外,浮起部件160是以与槽本体120的侧板120b的内面滑动的方式移动。另外,轨道部122以及槽部164,仅是引导浮起部件160的移动的引导机构的例子,引导机构的具体构成在本发明中并没有特别限定。引导机构只要是能够将浮起部件160的移动路径限制在特定的路径即可。
永久磁铁162、163的一方(在此为永久磁铁162)被配置在凸部161b,永久磁铁162、163的另一方(在此为永久磁铁163)被配置在凸部161c。虽然永久磁铁162、163的极化方向为一起平行于y方向,但是极化的朝向成为彼此相反。在本例中,永久磁铁162是S极相对于侧板120b而对向,永久磁铁163是N极相对于侧板120b而对向。另外,永久磁铁162、163是以在水平面(xy平面)内成为相同位置的方式被配置。在本例中,由于浮起部件160的移动路径被限制于仅在垂直方向(z方向),因此永久磁铁162的移动路径与永久磁铁163的移动路径成为彼此重合(但是,移动范围不完全一致)。
图4是表示盖部件140的图,(a)是俯视图,(b)是侧面图,(c)是仰视图。盖部件140是覆盖槽本体120的上面的开口的元件。盖部件140由被铰链143结合的盖本体部141与开闭盖部142构成。在此构成中,将开闭盖部142在箭头α方向(参照图4(b))开启,能够从已被开启的槽本体120的上面开口补充液剂。
本实施方式1的液剂残量侦测机构,是在液剂槽100内的浮起部件160中组合霍尔传感器200(参照图5)而构成。霍尔传感器200是在槽本体120的侧板120b的外侧,以与永久磁铁162以及永久磁铁163的移动路径对向的方式被配置。霍尔传感器200可以被安装在槽本体120的侧板120b的外侧面,也可以在安装有液剂槽100的洗衣机等的壳体内,以与侧板120b对向的方式被配置。另外,此处的霍尔传感器200是根据N极/S极的强度而变化输出电压的模拟输出型的霍尔传感器。
针对使用了浮起部件160与霍尔传感器200的液剂残量侦测方法,参照图5与图6进行说明。图5是表示与槽本体120内的液剂残量相应的浮起部件160与霍尔传感器200的位置关系的示意图,(a)表示液剂满量时,(b)表示液剂残量大致一半时,(c)表示液剂残量接近空时的状态。图6是表示随着槽本体120内的液剂残量的变化的霍尔传感器200的输出变化的图形。此外,在图5中,省略轨道部122以及槽部164的图示。
在槽本体120的液剂残留量是满量的情况(图5(a)的情况),已被设置在浮起部件160的永久磁铁162以及永久磁铁163,均位于远离霍尔传感器200的位置。此时,霍尔传感器200的输出电压成为0V(或大致0V)。此时的液剂的液面水位是图6的水位A。
若槽本体120的液剂从满量开始持续减少,则与霍尔传感器200的对向侧为N极的永久磁铁163接近霍尔传感器200,由此霍尔传感器200的输出电压向正侧持续增加。并且,在永久磁铁163与霍尔传感器200对向的位置,霍尔传感器200的输出电压成为最大值Vmax(图5(b)的情况)。此时液剂的液面水位是图6的水位B。
若槽本体120的液剂从图5(b)的状态进一步持续减少,则永久磁铁163从霍尔传感器200分离,与霍尔传感器200的对向侧为S极的永久磁铁163接近霍尔传感器200。由此,霍尔传感器200的输出电压向负侧逐渐减小。而且,在永久磁铁162与霍尔传感器200对向的位置,霍尔传感器200的输出电压成为最小值Vmin(图5(c)的情况)。此时液剂的液面水位是图6的水位C。
在本实施方式1的液剂残量侦测机构中,如图6所示,通过霍尔传感器200的输出电压,能够进行液剂残量快要成为空时的残量侦测(空侦测:图6的水位C的侦测)、与在比空侦测之前的阶段的残量侦测(图6的水位B的侦测)的多阶段侦测。
另外,仅看霍尔传感器200的输出电压,虽然图6的水位B以及水位C的针点(pinpoint)的侦测为可能,但是无法正确地侦测其间的过渡期状态。为了使此成为可能,可想到将霍尔传感器200的输出电压存储在存储器,从其变化的朝向进行判定。例如,霍尔传感器200的输出电压是从0到Vmax之间的值的情况,仅从其输出电压无法判定是图6的从水位A到水位B之间的状态(液面水位比图5(b)上的状态)、或是从水位B到水位A’之间的状态(液面水位比图5(b)下的状态)。但是,在驱动送液泵而向洗涤槽供给液剂时,若输出电压的变化的朝向是增加方向的话,则能够判定为从水位A到水位B之间的状态,若输出电压的变化的朝向是减少方向的话,则能够判定为从水位B到水位A’之间的状态。
另外,在包含过渡期状态而判定液剂残量,如图7所示,也可想到将浮起部件160的永久磁铁162以及永久磁铁163的距离变大的方法。图7是表示与槽本体120内的液剂残量相应的浮起部件160与霍尔传感器200的位置关系的示意图,(a)表示液剂满量时,(b)表示液剂残量大致一半时,(c)表示液剂残量接近空时的状态。
图8是表示在图7的液剂残量侦测机构中,随着槽本体内的液剂残量的变化的霍尔传感器的输出变化的图形。图7(a)~(c)的每一个的状态的液面水位,在图8中以水位A~C表示。如图7所示,在液面水位从最高(Full)到最低(Empty)之间,霍尔传感器200始终位于永久磁铁162与永久磁铁163之间。此情况,如图8所示,由于相对于液面水位霍尔传感器输出是唯一地确定,因此从霍尔传感器200的输出电压可直接判定任意的液面水位,没有将霍尔传感器200的输出电压存储到存储器的必要。
[实施方式2]
在上述实施方式1中,表示通过两个永久磁铁与一个霍尔传感器构成液剂残量侦测机构的例子。然而,本发明并不限定于此,在本发明实施方式2中,表示通过一个永久磁铁与两个霍尔传感器构成液剂残留量侦测机构的例子。
图9是表示与槽本体120内的液剂残量相应的浮起部件160与第一霍尔传感器201以及第二霍尔传感器202的位置关系的示意图,(a)表示液剂满量时,(b)表示液剂残量大致一半时,(c)表示液剂残量接近空时的状态。另外,在此设为在浮起部件160仅设置有一个永久磁铁163。如图9所示,第一霍尔传感器201以及第二霍尔传感器202,第一霍尔传感器201被配置在比第二霍尔传感器202上。在槽本体120的液剂残量为满量的情况(图9(a)的情况),永久磁铁163位于与第一霍尔传感器201对向的位置。在槽本体120的液剂残量接近空的情况(图9(c)的情况),永久磁铁163位于与第二霍尔传感器202对向的位置。
图10是表示在图9的液剂残量侦测机构中,随着槽本体内液剂残量的变化的霍尔传感器的输出变化的图形,(a)表示第一霍尔传感器201的输出Vout1,(b)表示第二霍尔传感器202的输出Vout2,(c)表示已从第一霍尔传感器201的输出Vout1减去第二霍尔传感器202的输出Vout2的运算结果。另外,图9(a)~(c)的每一个的状态的液面水位,在图10中以水位A~C表示。
第一霍尔传感器201的输出,如图10(a)所示,在水位A为最大(在此为Vmax),随水位下降而减少,在水位C成为最少(在此为0)。这是因为,第一霍尔传感器201在液剂为满量(水位A)时与永久磁铁163对向,随着液剂残量变少而远离永久磁铁163。
第二霍尔传感器202的输出,如图10(b)所示,在水位A为最少(在此为0),随着水位下降而增加,在水位C成为最大(在此为Vmax)。这是因为,第二霍尔传感器202在液剂为满量(水位A)时与永久磁铁163最分离,随着液剂残量变少而接近永久磁铁163。
从第一霍尔传感器201的输出Vout1减去了第二霍尔传感器202的输出Vout2的结果,如图10(c)所示,成为从水位A至水位C之间为单调减少的图形(图10(c)的图形,为了便于说明,作为直线记载)。对于这样单调减少的图形,通过与适当阈值的比较,可判定任意的液面水位。例如,若以“0”为阈值则能够判定图9(b)的水位B的状态,若(Vout1-Vout2)为0以上,则能够判定为液面水位为比图9(b)上的状态,若(Vout1-Vout2)为0以下,则能够判定为液面水位为比图9(b)下的状态。当然,若增加阈值的话,则也可进行更多阶段的液剂残留量的侦测。
另外,图10(a)、图10(b)所示的图形曲线为例子,根据霍尔传感器的输出规格而进行各种地变化。因此,不限于从第一霍尔传感器201的输出Vout1减去第二霍尔传感器202的输出Vout2,也可以根据霍尔传感器的输出规格,进行对数化、除法处理等,容易判别水位的处理。
[实施方式3]
在上述实施方式2,表示了通过一个永久磁铁与两个霍尔传感器构成液剂残量侦测机构的例子。相对于此,在本实施方式3,表示通过两个永久磁铁与两个以上的霍尔传感器构成液剂残量侦测机构的例子。
在实施方式2的构成中,第一霍尔传感器201以及第二霍尔传感器202,如图9(a)、(b)所示,为了在从水位A至水位C的广的范围表示模拟的变化,有使用磁通密度高(在xz面内的磁通的变动区域大)的永久磁铁163的必要,若使用磁通密度低(在xz面内的磁通的变动区域小)的永久磁铁163则侦测精度大幅地降低。本实施方式3提供即便使用磁通密度低的永久磁铁,也能够得到高侦测精度的液剂残量侦测机构。
图11是表示与槽本体120内的液剂残留量相应的浮起部件160与第一霍尔传感器201以及第二霍尔传感器202的位置关系的示意图,(a)表示液剂为满量时,(b)表示液剂残留量相对于满量大致2/3时,(c)表示液剂残留量相对于满量大致1/3时的状态。另外,在此,与实施方式1同样地,是在浮起部件160设有两个永久磁铁162、163。如图11所示,第一霍尔传感器201以及第二霍尔传感器202,第一霍尔传感器201被配置在比第二霍尔传感器202上。另外,在槽本体120的液剂残量为大致2/3的情况(图11(b)的情况),第一霍尔传感器201位于永久磁铁162以及163的中间。在槽本体120的液剂残量为大致1/3的情况(图11(c)的情况),第二霍尔传感器202位于永久磁铁162以及163的中间。
图12是表示在图11的液剂残量侦测机构中,随着槽本体内的液剂残量的变化的霍尔传感器的输出变化的图形。另外,图11(a)~(c)的每一个的状态的液面水位,在图12中以水位A~C表示。
如图12所示,第一霍尔传感器201的输出Vout1(图中,以实线表示),在水位B的前后表示急剧的变化,第一霍尔传感器201在永久磁铁162以及163中间的位置(即水位B)中成为0。第二霍尔传感器202的输出Vout2(图中,以虚线表示),在水位C的前后表示急剧的变化,第二霍尔传感器202在永久磁铁162以及163中间的位置(即水位C)中成为0。由此,水位B的侦测是判定第一霍尔传感器201的输出Vout1成为0的位置由此成为可侦测,水位C的判定是判定第二霍尔传感器202的输出Vout2成为0的位置由此成为可侦测。
另外,较佳为在水位B中,设为第二霍尔传感器202可检测若干量的磁通,另外,在水位C中,设为第一霍尔传感器201可检测若干量的磁通。由此,在水位B、水位C中,在第一霍尔传感器201的输出Vout1与第二霍尔传感器202的输出Vout2均成为输出0的情况,能够侦测到未安装浮起部件160等为正常的检测状态的范围外的情况,能够防止异常动作。
如此一来,在本实施方式3的液剂残量侦测机构,若与欲侦测的液面水位对应而配置霍尔传感器,则侦测所述霍尔传感器的输出成为0的位置,由此能够侦测任意的液面水位。另外,在图11中,由于使用两个霍尔传感器,因此被侦测的液面水位也是两处,但是使用的霍尔传感器的数量并没有限定,只要增加霍尔传感器的数量,也可侦测更多阶段的液剂残量。
在上述实施方式1~3,以浮起部件160的移动路径被限制于仅在垂直方向(z方向)的方式,设为通过轨道部122以及槽部164引导的构成。然而,浮起部件160的移动路径并非如上述般的限定于仅在垂直方向(z方向)。例如,也可将浮起部件160安装在一端成为旋转轴的旋转臂的另一端,将浮起部件160的移动路径限制为圆弧状的路径。此时,若在浮起部件160设有两个永久磁铁162、163,则永久磁铁162、163以从上述旋转臂的旋转轴成为相同距离的方式,即以包含相同旋转半径的移动路径的方式被配置。此时,也可以将旋转臂的旋转轴设置于盖部件140的盖本体部141的内侧。由此,能够防止浮起部件的忘记安装。
[实施方式4]
在上述实施方式1~3,说明了使用包括永久磁铁的浮起部件与霍尔传感器的方式的液剂残量侦测机构。在本实施方式4,说明使用了光传感器的方式的液剂残量侦测机构。
图13是表示本实施方式4的液剂残量侦测机构的示意图,是表示槽本体120与光传感器(发光元件300以及受光元件301~303)的配置关系的正面图。此外,在本实施方式4的槽本体120没有在内部配置浮起部件160的必要,因此也不包含轨道部122。另外,槽本体120以透射光的材料形成。
在本例中,光传感器由一个发光元件300、与三个受光元件301~303构成。发光元件300被配置于槽本体120的宽度广的一方的侧板120b的外侧,受光元件301~303被配置于槽本体120的宽度广的另一方的侧板120c的外侧。发光元件300以及受光元件301~303可以被安装在侧板120b以及侧板120c的外侧面,也可以在安装有槽本体120的洗衣机等的壳体内,以与侧板120b以及侧板120c对向的方式设置。另外,受光元件301~303是每一个的配置高度不同,从上以受光元件301、受光元件302、受光元件303的顺序配置。
如由图13示明般,若受光元件301在槽本体120内的液剂的液面水位比水位A(满量)高时,则无法接受来自发光元件300的光,若液面水位变得比水位A低,则成为能够接收来自发光元件300的光。即,受光元件301根据液面水位比水位A上或下,切换输出(ON/OFF)。相同地,受光元件302根据液面水位比水位B(大致一半)上或下,切换输出(ON/OFF)。受光元件303根据液面水位比水位C(快要变空时)上或下,切换输出(ON/OFF)。
若受光元件301~303在从发光元件300的受光时成为ON,则在受光元件301为ON且受光元件302、303为OFF的情况,能够判定水槽内的液面水位在水位A与水位B之间。在受光元件301、302为ON且受光元件303为OFF的情况,能够判定水槽内的液面水位在水位B与水位C之间。并且,在受光元件301~303为ON的情况,能够判定水槽内液面水位为比水位C下。
另外,受光元件301~303的受光范围,较佳为设为不侦测来自发光元件300的光被水折射后的折射光,而仅能够检测到直接光的程度的范围。由此,即便在水槽内的液剂的透明度高而难以遮挡来自发光元件300的光的情况,也能够检测液面水位。
另外,在本实施方式4的液剂残量侦测机构中,受光元件的数量并不限定于三个,若增加受光元件的数量,则也可侦测更多阶段的液剂残量。另外,发光元件的数量也不限定于一个,也可以是两个以上。
[实施方式5]
在本实施方式5,针对使用在上述实施方式1~4已说明的液剂残量侦测机构,在洗涤时进行液剂的自动投入的液剂自动投入装置、以及使用此的洗衣机进行说明。
图14是表示本实施方式5的洗衣机1的外观的立体图。另外,虽然在图14例示有滚筒式洗衣机,但是适用本发明的洗衣机的种类并没有特别限定,本发明也可以适用于纵型洗衣机。
洗衣机1,大略来说,由洗衣机本体10与门20构成,在洗衣机本体10的前面以覆盖洗涤物投入口的方式设置有门20。即,门20是以开闭洗衣机本体10的前面的方式设置。
洗衣机1被设为包括液剂自动投放装置,在洗衣机本体10的内部包含上述的液剂槽100。在洗衣机本体10的上面设置有开闭盖11,在打开了开闭盖11时,液剂槽100的盖部件140的开闭盖部142露出。即,用户打开洗衣机本体10的开闭盖11,进一步打开已露出的开关盖部142,由此能够向液剂槽100进行液剂(例如,液体洗涤剂)的补充。
图15是表示本实施方式5的液剂自动投入装置400的构成的模块图。如图15所示,液剂自动投入装置400由控制部410、残量侦测传感器420、以及送液泵430构成。另外,控制部410包含判定部411以及驱动控制部412。
残量侦测传感器420是在洗衣机1所包括的液剂残量侦测机构中,输出侦测结果的传感器。在此的液剂残量侦测机构,是只要在实施方式1~4已说明的任何的液剂残量侦测机构就可以使用。因此,残量侦测传感器420既有霍尔传感器的情况(使用实施方式1~3的液剂残量侦测机构的情况),也有光传感器的情况(使用实施方式4的液剂残量侦测机构的情况)。
送液泵430被与液剂槽100的槽本体120的液剂排出口121连接,在既定的时机被驱动,将被收容于槽本体120的液剂向洗衣机1的洗涤槽供给。另外,在送液泵430的下游或送液泵430与槽本体120的液剂排出口121之间,设置有开关阀,与送液泵430的驱动同步而开启阀。
判定部411基于从残量侦测传感器420输入的侦测结果,判定槽本体120内的液剂残量。驱动控制部412基于判定部411的判定结果,驱动送液泵430。具体来说,送液泵430根据槽本体120内的液剂残量,而调整驱动时间或吸引力。
以下,针对通过液剂自动投入装置400的液剂的投入量的调整方法进行说明。此外,在以下说明,例示液剂残量侦测机构(即,残量侦测传感器420)可侦测槽本体120的液面水位为大致一半即水位B、与液面水位为快要变空时即水位C的情况。在此情况,判定部411可判定液面水位比水位B上的情况、与液面水位比水位B下的情况。
若用户将洗涤物放入洗衣机1的洗涤槽,则测量此洗涤物的重量,并根据已被测量的重量自动地决定往洗涤槽供水的水量、被自动投入的洗涤剂量。在此,若例示通过液剂自动投入装置400进行洗涤剂的投入的情况,则驱动控制部412基本上以投入与洗涤槽的重量相应的洗涤剂量的方式,控制送液泵430的驱动时间。虽然省略了详细的图示,但是控制部410将应投入的洗涤剂量与送液泵430的驱动时间关联而将存储的泵驱动表存储在存储器,从此泵驱动表读出送液泵430的驱动时间。
但是,由本申请发明者确认以下情形:被投入的洗涤剂量,无法仅以送液泵430的驱动时间正确地控制,也会被液剂槽100的洗涤剂残量影响。即,在液剂槽100的洗涤剂的残量多的情况,由于槽本体120的洗涤剂的液面水位高,施加于送液泵430的吸入口的液压变大,因此相较于洗涤剂的液面水位低的情况,即便送液泵430的驱动时间相同,洗涤剂的投入量也变多。
因此,在本实施方式5的液剂自动投入装置400,进行与通过液剂残量侦测机构的侦测结果相应的送液泵430的驱动控制,调整洗涤剂的投入量。作为具体例子,可想到若液剂槽100的洗涤剂的残量变少,则送液泵430的驱动时间变长。例如,相较于液面水位被判定为比水位B上的情况的送液泵430的驱动时间,将液面水位被判定为比水位B下的情况的送液泵430的驱动时间变长,由此能够投入也考虑了液剂残量的适当的洗涤剂量。
作为决定送液泵430的驱动时间的方法,可想到在上述的泵驱动表中,将应投入的洗涤剂量与送液泵430的驱动时间、还有与液剂槽100的洗涤剂残量关联而预先存储,将应投入的洗涤剂量与液剂槽100的洗涤剂残量作为往所述泵驱动表的输入参数而读出送液泵430的驱动时间。
或者,可想到将液剂槽100的洗涤剂残量与修正系数关联而将存储的表预先存储在存储器,从所述表读出对应于洗涤剂残量的修正系数,将此修正系数乘上从泵驱动表读出的驱动时间的手法。此情况,上述的修正系数在洗涤剂残余量越少的情况则成为越大的值。
另外,作为调整投入的洗涤剂量的另外的例子,也有使送液泵430的吸引力变化的方法。例如,相较于液面水位被判定为比水位B上的情况的送液泵430的吸引力,使液面水位被判定为比水位B下的情况的送液泵430的吸引力变大,由此成为能够投入也考虑了液剂残留量的适当的洗涤剂量。另外,送液泵430的吸引力通过提高泵马达的转数而能够变大。
在上述说明的例子中,虽然例示了液面水位比水位B上或下而调整洗涤剂的投入量的情况,但是若将侦测的液面水位更多阶段地侦测,则当然可更细地进行投入量的调整。
另外,也可以在液剂残量侦测机构侦测到液剂槽100内的液剂成为既定残量后,之后,在每次液剂的使用,将其使用量从液剂残量中减去,由此更新液剂槽100内的液剂残量。由此,能够推测液剂槽100内现在的残量,根据已被推测的液剂残量,进行更细的投入量的调整成为可能。由于此情况也根据通过液剂残量侦测机构的侦测结果而调整洗涤剂的投入量,因此相对于根据洗涤槽的重量而决定的洗涤剂量,能够将实际被投入的洗涤剂量的误差抑制为小。因此,能够更精确地推测液剂槽100内的现在的残量。
[实施方式6]
在上述实施方式5中,说明了在洗衣机1设置了一个液剂自动投入装置的构成。此构成,可适用于仅针对洗涤剂进行自动投入的洗衣机1。但是,本发明的液剂自动投入装置,不仅能够利用在洗涤剂的自动投入,也能够利用在柔软剂的自动投入。因此,在洗衣机1,也可想到设置洗涤剂用与柔软剂用的两个液剂自动投入装置的情况。在本实施方式6中,针对洗衣机1设置两个的液剂自动投入装置的情况的两个液剂槽100的配置构成进行说明。
洗衣机1包括洗涤剂用与柔软剂用的两个液剂自动投入装置的情况,当然,针对上述的液剂槽100也需要洗涤剂用与柔软剂用的两个。此情况,两个液剂槽100较佳为在洗衣机1内相邻而配置。尤其是,较佳为使液剂槽100的开闭盖部142(参照图1)彼此相邻,在打开洗衣机1的开闭盖11时两方的液剂槽100的开闭盖部142一起露出。
图16是表示使用了实施方式1的液剂残量侦测机构的情况的液剂槽100的配置的立体图。另外,在图16中,虽然省略了液剂槽100的内部的图示,但是在实施方式1中已说明的浮起部件160被配置在内部。另外,霍尔传感器200的图示,说明与槽本体120的位置关系,并不限于安装在槽本体120的状态。
在图16所示的构成中,由于浮起部件160是配置于液剂槽100的内部,因此即便两个液剂槽100相邻也没有问题。另外,虽然液剂残量侦测机构的构成要素即霍尔传感器200,被配置在槽本体120的外侧,但是霍尔传感器200没有相对于槽本体120而配置在两侧的必要,仅配置在单方即可。因此,在两个液剂槽100相邻配置的情况下,相对于一方的液剂槽100的霍尔传感器200,配置在与另一方的液剂槽100的相邻面的相反侧即可。另外,在使用实施方式2、3的液剂残量侦测机构的情况,由于第一以及第二霍尔传感器201、202相对于槽本体120只配置在单方即可,因此基本上与图16所示的配置成为同样的配置。
图17是表示使用了实施方式4的液剂残量侦测机构的情况的液剂槽100的配置的分解立体图。
在图17所示的构成中,在两个液剂槽100的每一个,在槽本体120中设置有缺口凹部123。缺口凹部123是在从y方向看槽本体120的情况看起来是缺口状的凹部,在两个液剂槽100中,在x方向中彼此形成于相反侧。另外,在图17所示的构成,缺口凹部123较佳为相对于槽本体120而设置在与液剂排出口121为相反侧。因此,在两个液剂槽100中,液剂排放口121也可以在x方向中彼此形成于相反侧。
实施方式4的液剂残量侦测机构,是将液剂的残量侦测以由发光元件300以及受光元件301~303构成的光传感器进行,发光元件300与受光元件301~303有以夹着槽本体120的方式被配置在两侧的必要。因此,在将如图1所示(不包含缺口凹部123)的液剂槽100两个并排配置的情况,相对于槽本体120无法适当地配置光传感器。
相对于此,在图17所示的构成,在槽本体120设置有切口凹部123,由此在相邻配置的两个液剂槽100中,进行一方的槽本体120内的液剂的残量侦测的光传感器,在另一方的槽本体120的切口凹部123的形成处中,配置在槽本体120的两侧成为可能。
本次公开的实施方式所有的点为例示,并非作为限定性解释的根据。因此,本发明的技术范围,并非仅通过上述的实施方式而解释,而是基于权利要求的记载被划定。又,包含与权利要求均等的意思以及范围内的所有变更。
[引用的记载]
本国际申请是基于在2018年11月1日向日本特许厅提出的日本专利申请第2018-206699号而主张优先权,参照日本专利申请第2018-206699号的全内容,由此引用到本国际申请。
附图标记说明
1…洗衣机;10…洗衣机本体;11…开闭盖;20…门;100…液剂槽;120…槽本体;121…液剂排出口;122…轨道部;123…缺口凹部;140…盖部件;141…盖本体部;142…开闭盖部;160…浮起部件;161…浮起本体;162、163…永久磁铁;164…槽部;200…霍尔传感器;201…第一霍尔传感器;202…第二霍尔传感器;300…发光元件;301~303…发光元件;400…液剂自动投入装置;410…控制部;411…判定部;412…驱动控制部;420…残量侦测传感器;430…送液泵
- 液剂残量侦测机构、液剂自动投入装置、以及洗衣机
- 一种带有自动控制存液量功能的中药液剂包装装置