一种无人机集群辅助控制装置
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及无人机应用设备技术领域,特别是一种无人机集群辅助控制装置。
背景技术
无人机(无人驾驶飞机)是一种以无线电遥控或由自身程序控制为主的不载人飞机。主要包括军队用无人机以及民用无人机。民用无人机具有体积小、造价低、使用方便、对环境(包括起飞及降落环境)要求低的优点,备受使用者的青睐。随着科技的发展、社会的进步,无人机越来越多的应用在了各个领域。
在实际应用中,无人机有组网使用的需求,比如说晚上多架无人机在一个空域组成图案或文字等等,达到表演的效果。在无人机组网中,控制无人机之间的间距显得尤为重要,当无人机间距不合适时,有可能造成无人机之间的碰撞损坏等,给使用者带来较大的损失。目前,对于多架无人机组网中,主要还是依靠无人机上控制系统等控制无人机之间的间距,地面人员进行一定的协同无线操作完成无人机的组网飞行。实际情况下,多架无人机组网中,受到控制系统写入的软件程序影响,以及环境因素影响及地面人员的误操作影响,无人机之间有互相碰撞在一起的几率,现有技术中还无法有效规避这一问题。还有就是,由于无人机飞行高度较高,地面人员无法掌握无人机之间的间距,这样无法为技术人员后续改进无人机间距控制程序,以及地面协同控制提供理论数据支持,进一步对无人机集群控制技术的发展不能起到好的促进作用。基于上述,提供一种无人机组网飞行时能自动调节间距,防止无人机之间碰撞损坏,并能统计无人机之间非安全接近间距次数,为技术人员后续改进无人机间距控制程序,以及地面人员更好协同控制无人机集群提供有力技术支撑的无人机集群辅助控制装置显得尤为必要。
发明内容
为了克服现有无人机组网中,因技术所限,无法有效控制无人机与无人机之间发生碰撞的几率,以及无法统计无人机之间发生危险间距次数,不能给技术人员后续改进无人机间距控制程序,以及地面协同控制提供理论数据支持,对无人机集群控制技术的发展不能起到促进作用的弊端,本发明提供了在每个无人机本体的机身下端四周一侧各安装了一套轴流风扇,并在机身四周侧端安装了红外接近开关,应用中,当无人机本体四周接近其他无人机前,在轴流风扇作用下,无人机本体能自动反方向运动一段距离从而防止和其他无人机之间产生碰撞,并在机身上设置了提示机构,每次无人机本体和其他无人机接近到非安全距离时,提示机构能发送无线信号,地面的统计机构能实时统计若干无人机本体之间非安全距离接近的数量,从而给技术人员后续改进无人机间距控制程序,以及地面协同控制无人机飞行提供了有效理论数据支持,对无人机集群控制技术发展起到了有力促进作用的一种无人机集群辅助控制装置。
本发明解决其技术问题所采用的技术方案是:
一种无人机集群辅助控制装置,包括电源开关、轴流风扇,其特征在于还具有探测机构、提示机构、统计机构;所述探测机构包括光电开关和继电器,光电开关有相同的多只、分别安装在无人机本体的机身四周侧端,光电开关的探测头朝向外侧;所述轴流风扇有多套,分别安装在无人机本体的机身壳体下端四周中部;所述探测机构的继电器、电源开关、提示机构安装在无人机本体的壳体内;所述无人机本体的蓄电池和探测机构、提示机构的电源输入端电性连接;所述探测机构的信号输出端和提示机构的信号输入端电性连接,探测机构的多路电源输出端分别和多套轴流风扇的电源输入两端电性连接;所述统计机构包括无线接收电路和蓄电池、电源开关A、计数器,蓄电池、电源开关A、计数器,无线接收电路安装在元件盒内;所述蓄电池A和和计数器、无线接收电路的电源输入两端分别电性连接,无线接收电路的控制信号输出端和计数器的信号输入端分别经导线连接。
进一步地,所述探测机构的继电器有八只,继电器和光电开关之间电性连接,四套光电开关的正极电源输入端和其中四只继电器的正极控制电源输入端分别连接,四套光电开的负极电源输入端和其中四只继电器负极电源输入端及负极控制电源输入端、另外四只继电器的负极电源输入端连接,第一套光电开关的电源输出端和第一只继电器及第二只继电器的正极电源输入端连接,第二套光电开关的电源输出端和第三只继电器及第四只继电器的正极电源输入端连接,第三套光电开关的电源输出端和第五只继电器及第六只继电器的正极电源输入端连接,第四套光电开关的电源输出端和第七只继电器及第八只继电器的正极电源输入端连接。
进一步地,所述提示机构是无线发射电路模块。
进一步地,所述统计机构的无线接收电路包括无线接收电路模块、电阻、NPN三极管和继电器,其间电性连接,无线接收电路模块负极电源输入端和四只NPN三极管发射极连接,无线接收电路模块的正极电源输入端和四只继电器正极电源输入端连接,无线接收电路模块成品的四路输出端和四只电阻一端分别连接,四只电阻另一端和四只NPN三极管基极分别连接,四只NPN三极管集电极和四只继电器负极电源输入端分别连接。
本发明有益效果是:本发明集群无人机中的所有无人机安装一套本发明,无人机本体上天后,其他无人机飞控和现有技术一致,依靠无人机上控制系统等控制无人机之间的间距,地面人员进行一定的协同无线操作完成无人机的组网飞行。本发明中,在探测机构作用下,只要无人机本体向左或向右、向前、向后靠近其他无人机本体时,四套轴流风扇会分别得电顺时针转动,进而反向分别驱动无人机本体向右、向左、向后、向前运动,有效防止了无人机本体之间发生碰撞的几率,本发明中,每次无人机本体和其他无人机接近到非安全距离时,提示机构能发送无线信号,地面的统计机构无线接收电路接收到无线信号后,能经计数器实时统计若干无人机本体之间非安全距离接近的次数,从而给技术人员后续改进无人机间距控制程序(比如统计次数显示无人本体之间接近次数过多,那么代表控制无人机本体之间间距的程序有可能有问题,编程人员就可进行修正),以及地面人员协同控制无人机飞行(地面人员经统计次数如果发现无人本体之间接近次数过多,那么代表控制方法有问题,那么后续就可对自己的协同飞控方法做改正)提供了有效理论数据支持,对无人机集群控制技术发展起到了有力促进作用。基于上述,所以本发明具有好的应用前景。
附图说明
以下结合附图和实施例将本发明做进一步说明。
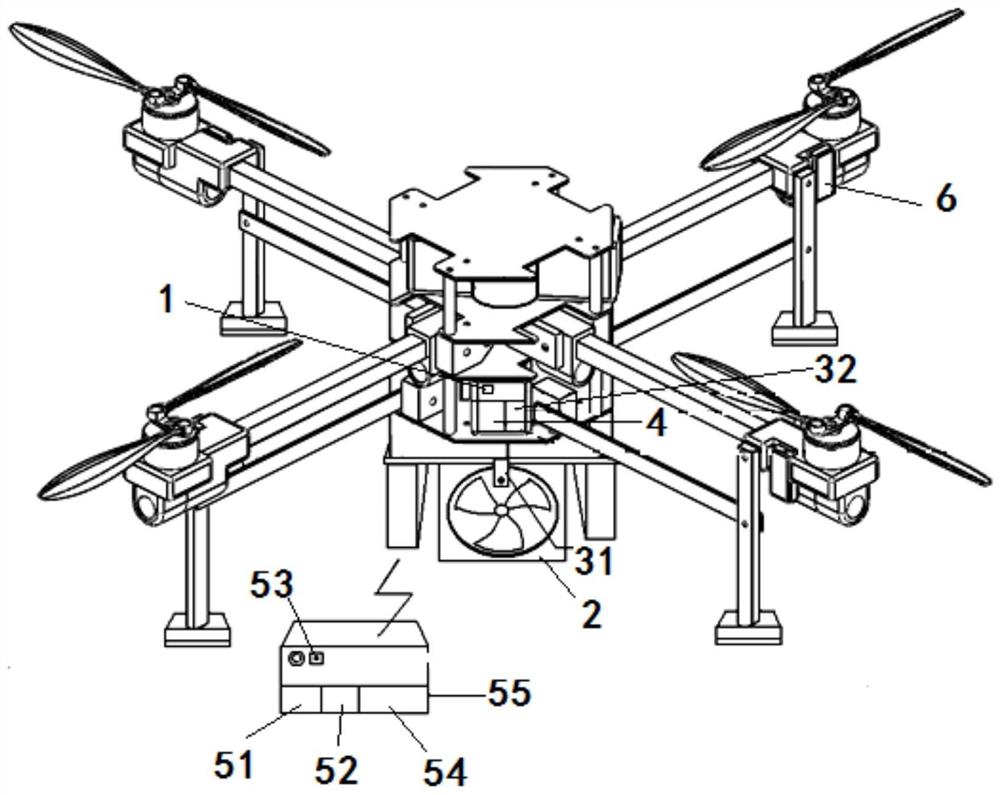
图1是本发明结构示意图。
图2、3是本发明电路图。
具体实施方式
图1中所示,一种无人机集群辅助控制装置,包括电源开关1、轴流风扇2,还具有探测机构、提示机构4、统计机构5;所述探测机构包括光电开关31和继电器32,光电开关31有相同的四只、分别用螺杆螺母安装在无人机本体6的机身四周侧端中部,光电开关31的探测头朝向外侧端;所述轴流风扇2有四套,分别用螺杆螺母安装在无人机本体6的机身壳体下端四周中部(光电开关31位于轴流风扇2前端);所述探测机构的继电器32、电源开关1、提示机构4安装在电路板上,电路板安装在无人机本体6的壳体内;所述统计机构包括无线接收电路51和蓄电池52、电源开关A53、计数器54,无线接收电路51和蓄电池52、电源开关A53、计数器54安装在元件盒55内,元件盒55位于地面无人机飞控人员身边。
虽然图1中显示出了多旋翼无人机,然而其附图并不是限制本发明的实施方式,本控制装置还可以应用于固定翼无人机,通过控制轴流风扇来调整集群无人机之间合适的间距。
图2、3所示,电源开关SK是拨动电源开关其操作手柄位于壳体外侧端,轴流风扇M1及M2、M3、M4是工作电压直流48V、20W的小型轴流风扇成品;探测机构的继电器有八只,继电器和光电开关之间电性连接,四套光电开关A、A1、A2、A3的正极电源输入端1脚和其中四只继电器K5、K6、K1、K2的正极控制电源输入端分别连接,四套光电开关A、A1、A2、A3的负极电源输入端2脚和其中四只继电器K5、K6、K1、K2负极电源输入端及负极控制电源输入端、另外四只继电器K7、K8、K3、K4的负极电源输入端连接,第一套光电开关A的电源输出端3脚和第一只继电器K5及第二只继电器K7的正极电源输入端连接,第二套光电开关A1的电源输出端3脚和第三只继电器K6及第四只继电器K8的正极电源输入端连接,第三套光电开关A2的电源输出端3脚和第五只继电器K1及第六只继电器K3的正极电源输入端连接,第四套光电开关A3的电源输出端3脚和第七只继电器K2及第八只继电器K4的正极电源输入端连接。四套光电开关A、A1、A2、A3是型号GP18-300DN1的PNP型远距离红外反射光电开关成品,四套光电开关A、A1、A2、A3各具有两个电源输入端1及2脚、一个高电平输出端3脚,工作时,当最远3米范围内其前端探测头的发射头发射出的红外光束被物品阻挡、探测头前端的接收头接收到后高电平输出端3脚会输出高电平,无物品阻挡时不输出高电平;四套光电开关A、A1、A2、A3最远探测距离3米,其壳体后侧端内具有调节旋钮,调节旋钮向左调节时其探测距离变近、向右调节时探测距离变远。提示机构是型号SF1500的无线发射电路模块成品A4,其无线信号发射距离是1500米,其具有四只无线发射按键S1、S2、S3、S4,分别按下时能发送四路不同无线控制信号。统计机构的无线接收电路包括型号SF1500的无线接收电路模块成品A5,电阻R1、R2、R3、R4,NPN三极管Q1、Q2、Q3、Q4和继电器K9、K10、K11、K12,其间经电路板布线连接,无线接收电路模块成品A4负极电源输入端3脚和四只NPN三极管Q1、Q2、Q3、Q4发射极连接,无线接收电路模块成品A4的正极电源输入端1脚和四只继电器K9、K10、K11、K12正极电源输入端连接,无线接收电路模块成品A4(2脚悬空)的四路输出端4、5、6、7脚和四只电阻R1、R2、R3、R4一端分别连接,四只电阻R1、R2、R3、R4另一端和四只NPN三极管Q1、Q2、Q3、Q4基极分别连接,四只NPN三极管Q1、Q2、Q3、Q4集电极和四只继电器K9、K10、K11、K12负极电源输入端分别连接。统计机构的蓄电池G1是型号6V/5Ah的锂蓄电池;电源开关ASK1是拨动电源开关,电源开关SK1的拨动手柄位于元件盒前上端开孔外;计数器A6是型号JX008BA-C11的带报警输出的计数器成品,其具有一个四位数码显示管、两个设置按键以及7个接线端,7个接线端1及2脚分别接输入12V电源、4及5脚分别接开关信号、3脚悬空、6及7脚分别接用电设备,通电后使用者分别通过操作两只设置按键可以设定计数器达到设定的计数后6及7脚输出正负两极电源,计数器A5具有记忆功能,设定后只要不进行下一次设置断电后其内部设定的数据也不会丢失,数码管显示界面以及两只设置按键的按键分别位于元件盒前上端开口及下端两个开孔外。
图1、2、3所示,无人机本体的蓄电池G正极和电源开关SK一端经导线连接。电源开关SK另一端、蓄电池G负极和探测机构电源输入端光电开关A的1及2脚、提示机构电源输入端无线发射电路模块A4的1及2脚分别经导线连接。探测机构的信号输出端继电器K7、K8、K3、K4的控制触点端及常开触点端和提示机构的信号输入端无线发射电路模块A4的发射按键S1、S2、S3、S4键下两个触点分别经导线连接。探测机构的四路电源输出端K5、K6、K1、K2两个常开触点端分别和四套轴流风扇M1、M2、M3、M4的正负电源输入两端经导线连接。统计机构中,蓄电池AG1正极和电源开关ASK1一端经导线连接;电源开关ASK1另一端;蓄电池AG1的负极和计数器A6电源输入两端1及2脚、无线接收电路的电源输入两端无线接收电路模块A5的1及3脚分别经导线连接;无线接收电路的控制信号输出端继电器K9、K10、K11、K12的控制触点端及常开触点端和计数器A6的信号输入端无电压信号端口SD的两个接线端分别经导线连接。CZ是充电插座其和蓄电池G1两极分别连接,充电插座CZ的插孔位于元件盒前端开孔外,蓄电池G1无电时可把外部电源充电插头插入充电插座CZ内为蓄电池G1充电。
图1、2、3所示,本发明集群无人机中的所有无人机安装一套本发明,无人机本体上天后,其他无人机飞控和现有技术一致,依靠无人机上控制系统等控制无人机之间的间距,地面人员进行一定的协同无线操作完成无人机的组网飞行。无人机本体上天前,先分别打开电源开关SK及SK1,于是,探测机构及提示机构、无线接收电路模块A5、计数器A6均处于得电工作状态。无人机本体上天后当其间距其他无人机左侧或右侧、前侧、后侧距离在一定以外时(比如间距大于3米,距离可调),光电开关A、A1、A2、A3的3脚不输出电源,那么继电器K1至K8也就不会得电吸合。无人机本体上天后,当其左侧间距其他无人机少于3米时,光电开关A的3脚会输出电源进入继电器K5、K7正极电源输入端,于是,继电器K5得电吸合其两个控制电源输入端和两个常开触点端分别闭合(继电器K7得电吸合其控制触点端和常开触点端闭合),进而,无人机本体左侧的轴流风扇M1得电工作其产生风力向右作用于无人机本体6,无人机本体向右侧运动一段距离;当无人机本体6左侧间距其他无人机大于3米后,光电开关A的3脚停止输出电源,进而,继电器K5失电不再吸合其控制电源输入端和常开触点端开路(同时继电器K7失电控制触点端和常开触点端开路),轴流风扇M1也就会失电不再推动无人机本体6向右侧运动,有效防止了无人机本体6和左侧端其他无人机碰撞前提下,还不会导致无人机之间间距过大影响集群控制。无人机本体上天后,当其右侧间距其他无人机少于3米时,光电开关A1的3脚会输出电源进入继电器K6、K8正极电源输入端,于是,继电器K6得电吸合其两个控制电源输入端和两个常开触点端分别闭合(继电器K8得电吸合其控制触点端和常开触点端闭合),进而,无人机本体右侧的轴流风扇M2得电工作其产生风力向左作用于无人机本体6,无人机本体向左侧运动一段距离;当无人机本体6右侧间距其他无人机大于3米后,光电开关A1的3脚停止输出电源,进而,继电器K6失电不再吸合其控制电源输入端和常开触点端开路(同时继电器K8失电控制触点端和常开触点端开路),轴流风扇M2也就会失电不再推动无人机本体6向左侧运动,有效防止了无人机本体6和右侧端其他无人机碰撞前提下,还不会导致无人机之间间距过大影响集群控制。
图1、2、3所示,无人机本体上天后,当其前侧间距其他无人机少于3米时,光电开关A2的3脚会输出电源进入继电器K1、K3正极电源输入端,于是,继电器K1得电吸合其两个控制电源输入端和两个常开触点端分别闭合(继电器K3得电吸合其控制触点端和常开触点端闭合),进而,无人机本体前侧的轴流风扇M3得电工作其产生风力向后作用于无人机本体6,无人机本体向后侧运动一段距离;当无人机本体6前侧间距其他无人机大于3米后,光电开关A2的3脚停止输出电源,进而,继电器K1失电不再吸合其控制电源输入端和常开触点端开路(同时继电器K3失电控制触点端和常开触点端开路),轴流风扇M3也就会失电不再推动无人机本体6向后侧运动,有效防止了无人机本体6和前侧端其他无人机碰撞前提下,还不会导致无人机之间间距过大影响集群控制。无人机本体上天后,当其后侧间距其他无人机少于3米时,光电开关A3的3脚会输出电源进入继电器K2、K4正极电源输入端,于是,继电器K2得电吸合其两个控制电源输入端和两个常开触点端分别闭合(继电器K4得电吸合其控制触点端和常开触点端闭合),进而,无人机本体后侧的轴流风扇M4得电工作其产生风力向前作用于无人机本体6,无人机本体向前侧运动一段距离;当无人机本体6后侧间距其他无人机大于3米后,光电开关A3的3脚停止输出电源,进而,继电器K2失电不再吸合其控制电源输入端和常开触点端开路(同时继电器4失电控制触点端和常开触点端开路),轴流风扇M4也就会失电不再推动无人机本体6向前侧运动,有效防止了无人机本体6和后侧端其他无人机碰撞前提下,还不会导致无人机之间间距过大影响集群控制。
图1、2、3所示,无人机本体上天后,只要发生和左侧或右侧、前侧、后侧无人机间距过近,继电器K7、K8、K3、K4得电吸合后,由于继电器K7、K8、K3、K4的控制触点端及常开触点端分别和无线发射电路模块A4的第一只发射按键S1、第二只发射按键S2、第三只发射按键S3、第四只发射按键S4下两个触点经导线相连,所以,无人机本体上天后,只要发生和左侧或右侧、前侧、后侧无人机间距过近,无电发射电路都会发射出第一路无线闭合信号或第二路无线闭合信号、第三路无线闭合信号、第四路无线闭合信号。无线接收电路模块A4分别接收到四路无线闭合信号后,其4脚或5、6、7脚会分别输出高电平经电阻R1或R2、R3、R4进入NPN三极管Q1或Q2、Q3、Q4的基极,进而NPN三极管Q1或Q2、Q3、Q4导通集电极分别输出低电平进入继电器K9或K10、K11、K12的负极电源输入端,于是,继电器K9或K10、K11、K12分别得电吸合其控制触点端和常开触点端分别闭合。由于继电器K9、K10、K11、K12的控制触点端及常开触点端和计数器A6的无电压触发信号输入端口SD的两个触点端分别连接,所以每当有其他无人机接近无人机本体时,计数器A6会进行一次累加计数。无人机集群落地后,技术人员经计数器累加统计的若干无人机本体6之间非安全距离接近的次数,能给技术人员后续改进无人机间距控制程序(比如统计次数显示无人本体之间接近次数过多,那么代表控制无人机本体之间间距的程序有可能有问题,编程人员就可进行修正),以及地面人员协同控制无人机集群(地面飞控人员经统计次数如果发现无人本体之间接近次数过多,那么代表控制方法有问题,后续就可对自己的协同飞控方法做改正)提供有效理论数据支持,对无人机集群控制技术发展起到了有力促进作用。图2、3中,电阻R1、R2、R3、R4阻值是1K,NPN三极管Q1、Q2、Q3、Q4型号是9013;继电器K1、K2、K3、K4、K5、K6、K7、K8是DC12V继电器,继电器K9、K10、K11、K12是DC5V继电器。
以上显示和描述了本发明的基本原理和主要特征及本发明的优点,对于本领域技术人员而言,显然本发明限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种无人机集群辅助控制装置
- 一种集群无人机的通信控制装置