基板处理装置以及基板处理方法
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及一种基板处理装置以及基板处理方法,尤其涉及一种利用相机拍摄处理基板的处理部的技术。成为处理对象的基板,例如包括半导体基板、液晶显示装置以及有机EL(Electroluminescence:电致发光)显示装置等FPD(Flat Panel Display:平板显示器)用基板、光盘用基板、磁盘用基板、光磁盘用基板、光掩模用基板、陶瓷基板、太阳能电池用基板、印刷基板等。
背景技术
以往,在半导体器件等的制造工序中,对基板供给纯水、光致抗蚀剂液、蚀刻液等各种处理液来进行清洗处理或抗蚀剂涂布处理等基板处理。作为使用这些处理液进行液体处理的装置,广泛使用一边使基板以水平姿势旋转一边从喷嘴向该基板的表面喷出处理液的基板处理装置。有时,这种基板处理装置为了并行处理多个基板而具有多个处理单元。
近年来,在基板处理装置中进行如下作业,即,利用相机拍摄处理基板的处理单元,对得到的图像进行处理,监视基板处理是否适当地进行。例如,在专利文献1中提出了如下方案,即,对喷出处理液的喷嘴进行拍摄,并对由此获得的图像进行处理,由此监视来自喷嘴的处理液的喷出。
现有技术文献
专利文献
专利文献1:日本特开2015-173148号公报
发明内容
发明要解决的问题
在并行通信的相机的情况下,需要为每个相机设置专用的通信线。另一方面,在串行通信的相机的情况下,由于能够共享通信线,所以具有容易增设的优点。然而,由于通信线被共享,所以在串行通信的相机被连接到计算机的情况下,为了确定哪个相机拍摄哪个被摄区域,需要预先将各相机与这些相机所拍摄的各被摄区域建立关联。
以往的关联作业是基于作业人员的手动作业或目视确认来进行的。具体而言,作业人员在设置多个相机时,预先记录各相机的固有的识别信息(序列号等)以及成为各相机的拍摄对象的被摄区域的信息(例如,处理单元的编号等),将该记录输入计算机。因此,以往的关联作业对作业人员来说成为很大的作业负担,并且有可能发生人为失误。
本发明的目的在于,提供一种适当地进行多个相机与这些相机所拍摄的各被摄区域的关联的技术。
用于解决问题的手段
为了解决上述课题,第一形态为一种基板处理装置,用于处理基板,具有:至少一个处理单元,对基板进行处理,第一相机以及第二相机,拍摄彼此不同的被摄区域,以及关联处理部,通过对由所述第一相机以及所述第二相机各自获得的图像进行处理,生成关联信息,所述关联信息表示各所述被摄区域与所述第一相机以及所述第二相机的各相机的关联的。
第二形态,在第一形态的基板处理装置中,所述第一相机以及所述第二相机的数据传输方式为串行通信。
第三形态,在第一形态或第二形态的基板处理装置中,还具有:第一照明器件,对第一个所述被摄区域进行照明,以及第二照明器件,对与第一个所述被摄区域不同的第二个所述被摄区域进行照明。
第四形态,在第三形态的基板处理装置中,还具有照明控制部,所述照明控制部控制所述第一照明器件以及所述第二照明器件中的各照明器件的点亮及熄灭的动作;所述关联处理部根据所述图像所示的亮度值来确定与所述图像对应的所述被摄区域。
第五形态,在第四形态的基板处理装置中,所述照明控制部进行使所述第一照明器件点亮并使所述第二照明器件熄灭的控制以及使所述第一照明器件熄灭并使所述第二照明器件点亮的控制。
第六形态,在第三形态至第五形态中的任一形态的基板处理装置中,所述第一照明器件以及所述第二照明器件各自的照明模式彼此不同,所述关联处理部根据所述照明模式来确定与所述图像对应的所述被摄区域。
第七形态,在第六形态的基板处理装置中,所述关联处理部根据所述图像中的亮度值分布来确定与所述图像对应的所述被摄区域。
第八形态,在第六形态或第七形态的基板处理装置中,从所述第一照明器件以及所述第二照明器件分别射出的光的颜色彼此不同,所述关联处理部根据所述图像所具有的颜色信息来确定与所述图像对应的所述被摄区域。
第九形态,在第一形态至第八形态中的任一形态的基板处理装置中,还具有存储部,所述存储部存储表示与标志物对应的所述被摄区域的参照信息,所述处理单元包括所述标志物,所述关联处理部基于所述标志物的像以及所述参照信息,确定与所述图像对应的所述被摄区域。
第十形态,在第九形态的基板处理装置中,所述处理单元包括在所述被摄区域内移动的可动部,所述标志物包括所述可动部,所述关联处理部基于所述可动部的位置,确定与所述图像对应的所述被摄区域。
第十一形态,在第九形态或第十形态的基板处理装置中,所述关联处理部基于图案匹配确定与所述图像对应的所述被摄区域。
第十二形态,在第一形态至第十一形态中的任一形态的基板处理装置中,具有多个所述处理单元,所述第一相机以及所述第二相机各自拍摄的所述被摄区域设定在彼此不同的所述处理单元中。
第十三形态,在第五形态的基板处理装置中,具有多个所述处理单元,第一个所述被摄区域设定在第一个所述处理单元中,第二个所述被摄区域设定于第二个所述处理单元中,所述关联处理部,将所述第一相机以及所述第二相机中的,拍摄到由所述第一相机以及所述第二相机各自获得的所述图像中平均亮度值大的所述图像的一方的相机与第一个所述被摄区域以及第二个所述被摄区域中被照明的所述被摄区域进行关联。
第十四形态,在第一形态至第十三形态中的任一形态的基板处理装置中,所述第一相机以及所述第二相机对设定在共同的所述处理单元中的不同的所述被摄区域进行拍摄。
第十五形态,在第一形态至第十四形态中的任一形态的基板处理装置中,所述处理单元中的至少一个处理单元包括:基板保持部,将所述基板保持为水平,旋转马达,使所述基板保持部围绕在铅垂方向上延伸的旋转轴线进行旋转,喷嘴,向由所述基板保持部保持的所述基板喷出处理液,以及喷嘴移动部,使所述喷嘴移动至所述第一相机以及所述第二相机中的一方的相机所拍摄的所述被摄区域内。
第十六形态为一种基板处理方法,用于处理基板,包括:a),在处理单元中处理基板,以及b),通过关联处理部对被摄区域彼此不同的第一相机以及第二相机分别拍摄而获得的图像进行处理,将各所述被摄区域与所述第一相机以及所述第二相机中的各相机进行关联。
第十七形态,在第十六形态的基板处理方法中,所述第一相机以及所述第二相机的数据传输方式为串行通信。
第十八形态,在第十六形态或第十七形态的基板处方法中,所述工序b)包括:b-1),在使对第一个所述被摄区域进行照明的第一照明器件点亮并使对第二个所述被摄区域进行照明的第二照明器件熄灭的状态下,通过所述第一相机以及所述第二相机进行拍摄,b-2),将所述第一相机或所述第二相机中的,拍摄到在所述工序(b-1)中获得的所述图像中平均亮度值大的所述图像的一方的相机与第一个所述被摄区域进行关联,b-3),在使所述第一照明器件熄灭并使所述第二照明器件点亮的状态下,通过所述第一相机以及所述第二相机进行拍摄,以及b-4),将所述第一相机或所述第二相机中的,拍摄到在所述工序(b-3)中获得的所述图像中平均亮度值大的所述图像的另一方的相机与第二个所述被摄区域进行关联。
发明的效果
根据第一形态的基板处理装置,通过对由各相机获得的各图像进行处理,来确定与各图像对应的被摄区域。由此,能够使将各被摄区域与对应于各被摄区域的各相机关联的处理自动化。因此,能够抑制基于作业人员的手动作业或目视确认而造成的人为错误的发生,因而能够适当地将各相机与各相机所拍摄的各被摄区域进行关联。
根据第二形态的基板处理装置,由于各相机进行串行通信,因而能够共有通信线。因此,能构容易地增加相机的台数。
根据第三形态的基板处理装置,能够通过用各照明器件对各被摄区域进行照明,良好地拍摄被摄区域。
根据第四形态的基板处理装置,能够通过控制照明器件的点亮及熄灭的动作,来变更各被摄区域的照明情况。由此,能够使由各相机拍摄而获得的图像的亮度值改变,因而能够容易地确定与各图像对应的被摄区域。因此,能够容易地将各相机与各相机所拍摄的被摄区域进行关联。
根据第五形态的基板处理装置,通过使第一照明器件以及第二照明器件中的一方的照明器件点亮,就可以对第一被摄区域以及第二被摄区域中对应的一方的被摄区域进行照明。因此,第一相机以及第二相机中,拍摄被照明的被摄区域的相机的图像的亮度值会比拍摄未被照明的被摄区域的相机的图像的亮度值更亮。由此,能够适当地关联与各相机对应的被摄区域。
根据第六形态的基板处理装置,能够根据照明模式的差异容易地从图像中确定被摄区域。
根据第七形态的基板处理装置,能够根据由照明模式的差异所产生的亮部分以及暗部分的位置的差异从图像中确定被摄区域。
根据第八形态的基板处理装置,能够根据颜色的差异容易地从图像中确定被摄区域。
根据第九形态的基板处理装置,能够基于由相机获得的图像中的标志物以及参照信息,确定与该相机对应的被摄区域。
根据第十形态的基板处理装置,能够基于图像中的可动部的位置,确定与图像对应的被摄区域。
根据第十一形态的基板处理装置,能够基于图案匹配确定与各图像对应的被摄区域。
根据第十二形态的基板处理装置,由于从各相机的图像确定与确定的处理单元对应的被摄区域,因而能够将各相机与各相机所拍摄的处理单元进行关联。
根据第十三形态的基板处理装置,由于从各相机的图像确定与确定的处理单元对应的被摄区域,因而能够将各相机与各相机所拍摄的各处理单元进行关联。另外,由于使照明器件依次点亮,因而能够容易地从由各相机获得的图像中确定被照明的图像。由此,能够高精度地将各相机与各相机所拍摄的处理单元进行关联。
根据第十四形态的基板处理装置,能够在共同的处理单元内将各被摄区域与各相机进行关联。
根据第十五形态的基板处理装置,能够适当地将拍摄进行液体处理的处理单元的相机与对应的被摄区域关联。
根据第十六形态的基板处理方法,通过对由各相机获得的各图像进行处理,来确定与各图像对应的被摄区域。由此,能够使将各被摄区域与对应于各被摄区域的各相机关联的处理自动化。因此,能够抑制基于作业人员的手动作业或目视确认而造成的人为错误的发生,因而能够适当地将各相机与各相机所拍摄的被摄区域进行关联。
根据第十七形态的基板处理方法,由于各相机进行串行通信,因而能够共有通信线。因此,能够容易地增加相机的台数。
根据第十八形态的基板处理方法,由于从各相机的图像确定与确定的处理单元对应的被摄区域,因而能够将各相机与各相机所拍摄的各处理单元进行关联。另外,由于使第一照明器件以及第二照明器件依次点亮,因而能够容易地从由各相机获得的图像中确定被照明的图像。由此,能够高精度地将各相机与各相机所拍摄的被摄区域进行关联。
附图说明
图1是示出第一实施方式的基板处理装置100的整体结构的图。
图2是第一实施方式的清洗处理单元1的概略俯视图。
图3是第一实施方式的清洗处理单元1的概略纵剖视图。
图4是示出相机70与作为可动部的喷嘴30之间的位置关系的图。
图5是示出控制部8与各清洗处理单元1之间的连接关系的框图。
图6是示出第一关联处理的流程的一个示例的图。
图7是示意性地示出在第四关联处理中由相机70(1)获得的图像PH(1)的图。
图8是示意性地示出在第四关联处理中由相机70(2)获得的图像PH(2)的图。
图9是示意性地示出在第四关联处理中由相机70(3)获得的图像PH(3)的图。
图10是示意性地示出在第四关联处理中由相机70(4)获得的图像PH(4)的图。
图11是示意性地示出在第五关联处理中由相机70(1)获得的图像PH(1)的图。
图12是示意性地示出在第五关联处理中由相机70(2)获得的图像PH(2)的图。
图13是示意性地示出在第五关联处理中由相机70(3)获得的图像PH(3)的图。
图14是示意性地示出在第五关联处理中由相机70(4)获得的图像PH(4)的图。
图15是示意性地示出在第六关联处理中由相机70(1)获得的图像PH(1)的图。
图16是示意性地示出在第六关联处理中由相机70(2)获得的图像PH(2)的图。
图17是示意性地示出在第六关联处理中由相机70(3)获得的图像PH(3)的图。
图18是示意性地示出在第六关联处理中由相机70(4)获得的图像PH(4)的图。
图19是示意性地示出在第七关联处理中由相机70(1)获得的图像PH(1)的图。
图20是示意性地示出在第七关联处理中由相机70(2)获得的图像PH(2)的图。
图21是示意性地示出在第七关联处理中由相机70(3)获得的图像PH(3)的图。
图22是示意性地示出在第七关联处理中由相机70(4)获得的图像PH(4)的图。
图23是第二实施方式的清洗处理单元1A的概略俯视图。
具体实施方式
以下,参照所附的附图说明本发明的实施方式。此外,该实施方式所记载的构成要素仅为例示,并非旨在将本发明的范围仅限于这些实施方式。在附图中,为了容易理解,有时根据需要将各部的尺寸或数量夸张或简化来图示。
除非特别说明,否则表示相对或绝对的位置关系的表述(例如,“向一方向”、“沿着一方向”、“平行”、“正交”、“中心”、“同心”、“同轴”等)不仅严格地表示该位置关系,还表示在公差或者可获得相同程度的功能的范围内相对地位移角度或距离后的状态。除非特别说明,否则表示相等的状态的表述(例如,“同一”、“相等”、“均质”等)不仅表示定量且严格相等的状态,还表示存在公差或者可获得相同程度的功能的差的状态。除非特别说明,否则表示形状的表述(例如,“四边形状”或“圆筒形状”等)不仅在几何上严格地表示该形状,还表示在可获得相同程度的效果的范围内具有例如凹凸或倒角等的形状。“设置有”、“具有”、“具备”、“包括”或“有”一构成要素的表述,并非是排除其他构成要素的存在的排他性表述。除非特别说明,否则“~之上”除两个元件接触的情况以外,还包括两个元件分离的情况。
1.第一实施方式
图1是示出第一实施方式的基板处理装置100的整体结构的图。基板处理装置100是对作为处理对象的基板W一片一片地进行处理的单片式的处理装置。基板处理装置100使用药液以及冲洗液(纯水等)对圆形薄板状的硅基板即基板W进行清洗处理后,进行干燥处理。作为药液,例如可使用SC1(ammonia-hydrogen peroxide mixture:氨过氧化氢水溶液混合液)、SC2(hydrochloric hydrogen peroxide mixed water solution:盐酸过氧化氢水溶液混合水溶液)、DHF(Diluted Hydrofluoric Acid:稀氢氟酸)液等。在以下的说明中,对于处理液,将药液与冲洗液总称为“处理液”。此外,基板处理装置100也可以构成为,并非供给用于清洗处理的液体,而供给用于成膜处理的光致抗蚀剂液等涂布液、用于去除不需要的膜的药液、用于蚀刻的药液来对基板进行湿式处理。
基板处理装置100具有多个清洗处理单元1、分度器(indexer)102以及主搬运机器人103。分度器102将从装置外接收的处理对象的基板W搬运至装置内,并将已完成清洗处理的处理完毕的基板W搬出至装置外。分度器102载置多个搬运器(省略图示),并且具有移送机器人(省略图示)。作为搬运器,也可以采用将基板W收纳于密闭空间的FOUP(FrontOpening Unified Pod:前开式晶圆传送盒)或SMIF(Standard Mechanical InterFace;标准机械界面)传送盒或者将基板W暴露于外部空气中的OC(Open Cassette:开放式晶圆匣)。移送机器人在搬运器与主搬运机器人103之间移送基板W。
清洗处理单元1对一片基板W进行液体处理及干燥处理。在基板处理装置100中配置有12个清洗处理单元1。具体而言,以包围主搬运机器人103的周围的方式配置有4个塔,各个塔分别包括在铅垂方向上层叠的3个清洗处理单元1。在图1中,概略性地表示重叠成三层的清洗处理单元1之一。此外,基板处理装置100的清洗处理单元1的数量并不限定于12个,也可以适当地变更。
主搬运机器人103设置在将清洗处理单元1层叠而成的4个塔的中央。主搬运机器人103将从分度器102接收的处理对象的基板W搬入各清洗处理单元1。另外,主搬运机器人103从各清洗处理单元1搬出处理完的基板W并交给分度器102。
清洗处理单元1
以下,对搭载于基板处理装置100的12个清洗处理单元1中的一个清洗处理单元1进行说明,但是对于其他清洗处理单元1,除喷嘴30、60、65的配置关系不同以外,具有相同的结构。
图2是第一实施方式的清洗处理单元1的概略俯视图。图3是第一实施方式的清洗处理单元1的概略纵剖视图。图2示出基板W未保持于旋转卡盘20的状态,图3示出基板W保持于旋转卡盘20的状态。
清洗处理单元1在腔室10内具有:旋转卡盘20,将基板W保持为水平姿势(基板W的表面的法线沿着铅垂方向的姿势);三个喷嘴30、60、65,用于向由旋转卡盘20保持的基板W的上表面供给处理液;处理杯40,包围旋转卡盘20的周围;以及相机70,拍摄旋转卡盘20的上方空间。另外,在腔室10内的处理杯40的周围,设置有将腔室10的内侧空间上下分隔的分隔板15。
腔室10具有沿着铅垂方向并包围四周的侧壁11、封闭侧壁11的上侧的顶壁12以及封闭侧壁11的下侧的底壁13。由侧壁11、顶壁12以及底壁13所包围的空间成为基板W的处理空间。另外,在腔室10的侧壁11的一部分,设置有供主搬运机器人103相对于腔室10搬入搬出基板W的搬入搬出口以及打开和关闭该搬入搬出口(均省略图示)的闸门。
在腔室10的顶壁12上安装有风机过滤单元(fan filter unit,FFU)14,用于将设置有基板处理装置100的洁净室内的空气进一步清洁化并供给到腔室10内的处理空间。FFU14具有用于取入洁净室内的空气并送出至腔室10内的风机及过滤器(例如HEPA过滤器(High Efficiency Particulate Air Filter:高效空气过滤器))。FFU14在腔室10内的处理空间形成清洁空气的降流(down flow)。为了使从FFU14供给的清洁空气均匀地分散,也可以在顶壁12的正下方设置穿设有多个吹出孔的冲孔板(punching plate)。
旋转卡盘20具有旋转底座21、旋转马达22、盖构件23以及旋转轴24。旋转底座21具有圆板形状,以水平姿势固定在沿着铅垂方向延伸的旋转轴24的上端。旋转马达22设置在旋转底座21的下方,作为使旋转轴24旋转的旋转马达而发挥功能。旋转马达22经由旋转轴24而使旋转底座21在水平面内旋转。盖构件23具有包围旋转马达22及旋转轴24的周围的筒状。
圆板形状的旋转底座21的外径略大于由旋转卡盘20保持的圆形的基板W的直径。因此,旋转底座21具有与应保持的基板W的下表面的整个面相向的保持面21a。
在旋转底座21的保持面21a的周缘部,立射有多个(在本实施方式中为4个)卡盘销26。各卡盘销26沿着与圆形的基板W的外周圆的外径对应的圆周上空开均等的间隔而配置。在本实施方式中,4个卡盘销26以90°间隔设置。通过收纳于旋转底座21内的省略图示的连杆机构来联动地驱动各卡盘销26。旋转卡盘20使各卡盘销26分别抵接于基板W的外周端来夹持基板W,由此,在旋转底座21的上方以接近保持面21a的水平姿势保持该基板W(参照图3)。另外,旋转卡盘20使各卡盘销26分别从基板W的外周端分离,由此解除基板W的夹持。各卡盘销26是以水平姿势保持基板W的基板保持部。
覆盖旋转马达22的盖构件23的下端固定于腔室10的底壁13,上端到达旋转底座21的正下方为止。在盖构件23的上端部设置有凸缘状构件25,该凸缘状构件25从盖构件23向外侧大致水平地突出,进而向下方弯曲并延伸。在旋转卡盘20通过多个卡盘销26的夹持来保持基板W的状态下,旋转马达22使旋转轴24旋转,由此能够使基板W围绕穿过基板W的中心的沿着铅垂方向的旋转轴线CX进行旋转。此外,旋转马达22的驱动由控制部8控制。
喷嘴30是在喷嘴臂32的前端安装喷出头31而构成的。喷嘴臂32的基端侧固定并连结于喷嘴基座33。可以通过设置于喷嘴基座33的马达332(喷嘴移动部),围绕沿着铅垂方向的轴进行转动。
如图2中的箭头AR34所示,通过喷嘴基座33进行转动,喷嘴30在旋转卡盘20的上方的位置与处理杯40的外侧的待机位置之间,沿着水平方向以圆弧状移动。通过喷嘴基座33的转动,喷嘴30在旋转底座21的保持面21a的上方摇动。详细而言,在旋转底座21的上方,移动至在水平方向上延伸的既定的处理位置TP1。此外,使喷嘴30移动至处理位置TP1与使喷嘴30的前端部的喷出头31移动至处理位置TP1的意思相同。
喷嘴30以被供给多种处理液(至少包含纯水)的方式构成,能够从喷出头31喷出多种处理液。此外,也可以在喷嘴30的前端设置多个喷出头31,并从各喷出头31分别地喷出相同或不同的处理液。喷嘴30(详言而言,喷出头31)在处理位置TP1停止并喷出处理液。从喷嘴30喷出的处理液着落于由旋转卡盘20保持的基板W的上表面。
在本实施方式的清洗处理单元1中,除上述喷嘴30以外,还设置有两个喷嘴60、65。本实施方式的喷嘴60、65具有与上述喷嘴30相同或类似的结构。即,喷嘴60在喷嘴臂62的前端安装喷出头而构成的,如箭头AR64所示,通过连结于喷嘴臂62的基端侧的喷嘴基座63而在旋转卡盘20的上方的处理位置与处理杯40的外侧的待机位置之间以圆弧状移动。喷嘴65是在喷嘴臂67的前端安装喷出头而构成的,如箭头AR69所示,通过连结于喷嘴臂67的基端侧的喷嘴基座68而在旋转卡盘20的上方的处理位置与处理杯40的外侧的待机位置之间以圆弧状移动。
喷嘴60、65也以被供给至少包含纯水的多种处理液的方式构成,在处理位置向由旋转卡盘20保持的基板W的上表面喷出处理液。此外,喷嘴60、65中的至少一者也可以为二流体喷嘴,该二流体喷嘴将纯水等清洗液与经加压的气体混合来生成液滴,并将该液滴与气体的混合流体喷射至基板W。另外,设置于清洗处理单元1的喷嘴数量不限定于3个,只要是1个以上即可。
无需使喷嘴30、60、65分别以圆弧状移动。例如,也可以设置直线驱动部来使喷嘴进行直线移动。
以插通旋转轴24的内侧的方式,沿着铅垂方向设置有下表面处理液喷嘴28。下表面处理液喷嘴28的上端开口形成在与由旋转卡盘20保持的基板W的下表面中央相向的位置。下表面处理液喷嘴28也以被供给多种处理液的方式构成。从下表面处理液喷嘴28喷出的处理液着落于由旋转卡盘20保持的基板W的下表面。
包围旋转卡盘20的处理杯40具有能够相互独立地升降的内杯41、中杯42及外杯43。内杯41包围旋转卡盘20的周围,具有相对于旋转轴线CX大致旋转对称的形状,该旋转轴线CX穿过由旋转卡盘20保持的基板W的中心。该内杯41一体地具有:俯视观察时为圆环状的底部44;圆筒状的内壁部45,从底部44的内周缘向上方立起;圆筒状的外壁部46,从底部44的外周缘向上方立起;第一引导部47,从内壁部45与外壁部46之间立起,上端部描绘平滑的圆弧且向中心侧(靠近由旋转卡盘20保持的基板W的旋转轴线CX的方向)斜上方延伸;以及圆筒状的中壁部48,从第一引导部47与外壁部46之间向上方立起。
在内杯41最大限度上升的状态下,内壁部45以保持适当的间隙的方式收纳于盖构件23与凸缘状构件25之间。在内杯41与中杯42最接近的状态下,中壁部48以保持适当的间隙的方式收纳于中杯42的后述的第二导引部52与处理液分离壁53之间。
第一导引部47具有描绘平滑的圆弧且向中心侧(靠近基板W的旋转轴线CX的方向)斜上方延伸的上端部47b。另外,将内壁部45与第一导引部47之间设为用于收集并废弃使用完的处理液的废弃槽49。将第一导引部47与中壁部48之间设为用于收集并回收使用完的处理液的圆环状的内侧回收槽50。进而,将中壁部48与外壁部46之间设为用于收集并回收与内侧回收槽50不同种类的处理液的圆环状的外侧回收槽51。
废弃槽49连接着省略图示的排气排液机构,该排气排液机构用于排出该废弃槽49收集的处理液,并将废弃槽49内强制地排气。排气排液机构例如沿着废弃槽49的圆周方向等间隔地设置四个。另外,内侧回收槽50以及外侧回收槽51连接着回收机构(均省略图示),该回收机构用于将分别被内侧回收槽50及外侧回收槽51收集的处理液回收至设置于基板处理装置100的外部的回收罐中。此外,内部回收槽50以及外侧回收槽51的底部相对于水平方向仅倾斜微小角度,在其最低的位置连接有回收机构。由此,流入内侧回收槽50以及外侧回收槽51的处理液被顺利地回收。
中杯42包围旋转卡盘20的周围,具有相对于旋转轴线CX大致旋转对称的形状,该旋转轴线CX穿过由旋转卡盘20保持的基板W的中心。该中杯42具有第二导引部52以及与该第二引导部52连结的圆筒状的处理液分离壁53。
第二引导部52在内杯41的第一引导部47的外侧具有下端部52a、上端部52b以及翻折部52c,该下端部52a与第一引导部47的下端部同轴且为圆筒状,该上端部52b从下端部52a的上端起描绘平滑的圆弧且向中心侧(靠近基板W的旋转轴线CX的方向)斜上方延伸,该翻折部52c使上端部52b的前端部向下方翻折而形成。下端部52a在内杯41与中杯42最接近的状态下,在第一引导部47与中壁部48之间以保持适当的间隙的方式收纳在内侧回收槽50内。另外,上端部52b以与内杯41的第一引导部47的上端部47b在上下方向上重叠的方式设置,在内杯41与中杯42最接近的状态下,上端部52b相对于第一引导部47的上端部47b以保持极微小的间隔的方式而相接近。翻折部52c在内杯41与中杯42最接近的状态下,翻折部52c与第一引导部47的上端部47b的前端在水平方向上重叠。
第二引导部52的上端部52b以越是下方,壁厚变得越厚的方式形成。处理液分离壁53具有以从上端部52b的下端外周缘部向下方延伸的方式设置的圆筒形状。处理液分离壁53在内杯41与中杯42最接近的状态下,在中壁部48与外杯43之间保持适当的间隙而收纳在外侧回收槽51内。
外杯43具有相对于旋转轴线CX大致旋转对称的形状,该旋转轴线CX穿过由旋转卡盘20保持的基板W的中心。外杯43在中杯42的第二引导部52的外侧包围旋转卡盘20。该外杯43具有作为第三引导部的功能。外杯43具有下端部43a、上端部43b以及翻折部43c,该下端部43a与第二引导部52的下端部52a同轴且形成圆筒状,该上端部43b从下端部43a的上端起描绘平滑的圆弧且向中心侧(靠近基板W的旋转轴线CX的方向)斜上方延伸,该翻折部43c使上端部43b的前端部向下方翻折而形成。
下端部43a在内杯41与外杯43最接近的状态下,在中杯42的处理液分离壁53与内杯41的外壁部46之间保持适当的间隙而收纳在外侧回收槽51内。上端部43b以与中杯42的第二引导部52在上下方向上重叠的方式设置,在中杯42与外杯43最接近的状态下,上端部43b相对于第二引导部52的上端部52b以保持极微小的间隔的方式而相接近。在中杯42与外杯43最接近的状态下,翻折部43c与第二引导部52的翻折部52c在水平方向上重叠。
内杯41、中杯42以及外杯43能够相互独立地升降。即,在各个内杯41、中杯42以及外杯43中,分别设置有升降机构(省略图示),由此,分别独立地进行升降。作为这样的升降机构,例如,能够采用滚珠丝杠机构或气缸等公知的各种机构。
分隔板15以在处理杯40的周围将腔室10的内侧空间上下分隔的方式设置。分隔板15可以为包围处理杯40的一片板状构件,也可以为将多个板状构件接合而成的构件。另外,在分隔板15上,也可以形成有在厚度方向上贯通的通孔或切口,在本实施方式中,形成有用于供支撑轴穿过的通孔,该支撑轴用于支撑喷嘴30、60、65的喷嘴基座33、63、68。
分隔板15的外周端与腔室10的侧壁11连结。另外,分隔板15的包围处理杯40的端缘部形成为直径比外杯43的外径大的圆形。因此,分隔板15不会妨碍外杯43的升降。
另外,在腔室10的侧壁11的一部分且底壁13的附近设置有排气管18。排气管18与省略图示的排气机构连通连接。从风机过滤单元14供给并在腔室10内流下的清洁空气之中,在处理杯40与分隔板15之间穿过的空气从排气管18排出到装置外。
图4是示出相机70与作为可动部的喷嘴30之间的位置关系的图。相机70在铅垂方向上设置在基板W的铅垂方向上侧。相机70具有例如作为固体拍摄元件之一的CCD(ChargeCoupled Device:电荷耦合元件)和电子快门、透镜等光学系统。为了拍摄基板W的上表面,将相机70的拍摄方向(即拍摄光学系统的光轴方向)设定为朝向基板W的上表面的旋转中心(或其附近)斜向下。相机70将由旋转卡盘20保持的基板W的整个上表面包含在相机70的视场中。例如,在水平方向上,图2中被点划线包围的范围(被摄区域)包含在相机70的视场中。
相机70以使得其拍摄视场中至少包含位于处理位置TP1的喷嘴30的前端的方式设置,也就是说,设置在包含喷出头31的附近的位置。在本实施方式中,如图4所示,将相机70设置在从前方上方拍摄位于处理位置TP1的喷嘴30的位置。因此,相机70能够拍摄包含处于处理位置TP1的喷嘴30的前端的被摄区域PA。同样地,相机70拍摄喷嘴60、65位于处理位置时的包含各前端的被摄区域PA,该处理位置是对由旋转卡盘20保持的基板W进行处理时的位置。在相机70被设置在图2及图4所示的位置的情况下,由于喷嘴30、60在相机70的拍摄视场内横向移动,因此能够适当地拍摄各处理位置的各喷嘴30、60的前端,但是,对于喷嘴65,由于该喷嘴65在相机70的视场内沿纵深方向移动,因而也有可能无法适当地拍摄喷嘴65在该处理位置附近的移动。在此情况下,也可以与相机70分开地设置用于拍摄喷嘴65的相机。
喷嘴30通过喷嘴基座33的驱动,在由旋转卡盘20保持的基板W的上方的处理位置TP1(图4中虚线所示的位置)与处理杯40的外侧的待机位置(图4的实线位置)之间往返移动。处理位置TP1是从喷嘴30向由旋转卡盘20保持的基板W的上表面喷出处理液来进行清洗处理的位置。处理位置TP1是由旋转卡盘20保持的基板W中的比中心偏靠缘部的位置。待机位置是喷嘴30不进行清洗处理时停止处理液的喷出而待机的位置。待机位置是从旋转底座21的上方离开的位置,在水平面内为处理杯40的外侧的位置。在待机位置,也可以设置有收纳喷嘴30的喷出头31的待机盒。
处理位置TP1也可以为基板W的中心等的任意位置,进而处理位置TP1也可以为从基板W的上方离开的位置。在后者的情况下,可以使从喷嘴30喷出的处理液从基板W的外方飞散至基板W的上表面。另外,在使喷嘴30停止在处理位置TP1的状态下,不需要从喷嘴30喷出处理液。例如,也可以一边从喷嘴30喷出处理液,一边将处理位置TP1作为一端,使喷嘴30在基板W的上方沿水平方向延伸的既定的处理区间内移动。
如图3所示,在腔室10内,在分隔板15的上方的位置设置有照明器件71。照明器件71例如包括LED(Light Emitting Diode:发光二极管)灯作为光源。照明器件71将相机70拍摄腔室10内所需要的照明光供给至处理空间。通过各照明器件71对对应的被摄区域PA分别进行照明,各相机70能够良好地拍摄各被摄区域PA。为了在各清洗处理单元1间使相机70的拍摄条件一致,对各清洗处理单元1分别设置相同结构的照明器件71。
如图3所示,在一个腔室10内,相机70与照明器件71设置在腔室10的对角线上,使相机70的拍摄方向(镜头的方向)与照明器件71的照明方向相向。然而,该位置关系不是必须的。例如,也可以将照明器件71配置在相机70方附近,将相机70的拍摄方向与照明器件71的照明方向设定为相同的方向。
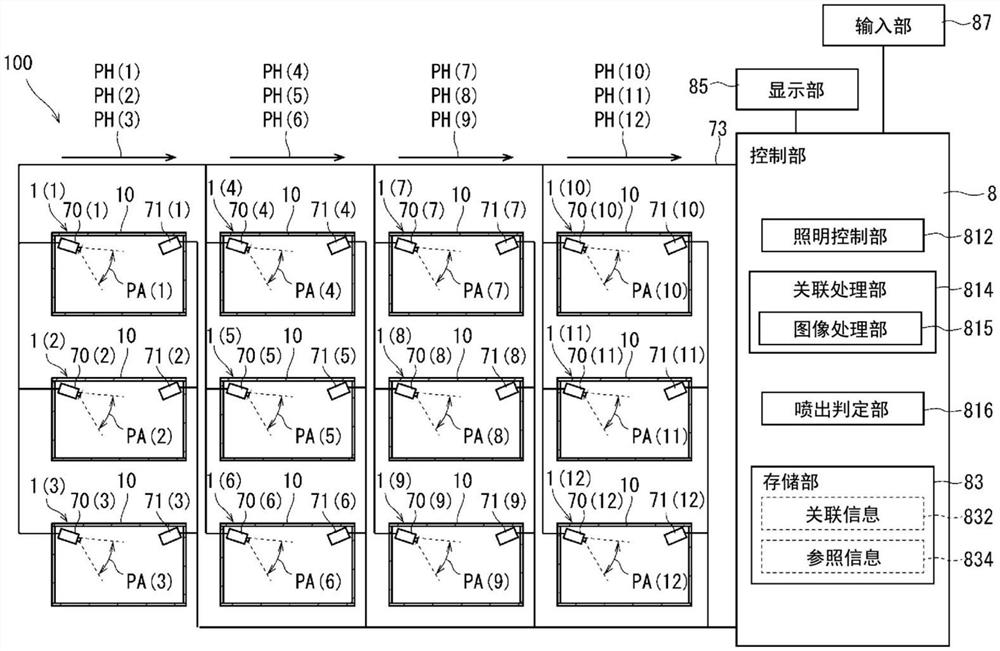
图5是示出控制部8与各清洗处理单元1之间的连接关系的框图。作为设置于基板处理装置100的控制部8的硬件的结构与一般的计算机相同。即,控制部8具有进行各种运算处理的CPU(Central Processing Unit:中央处理单元)、存储基本程序的读取专用的存储器即ROM(Read Only Memory:只读存储器)、存储各种信息的自由读写的存储器即RAM(Random Access Memory:随机存取存储器)以及预先存储控制用软件(程序)或数据等的磁盘等。通过控制部8的CPU执行规定的处理程序,基板处理装置100的各动作机构由控制部8控制,进行基板处理装置100中的处理。
图5所示的照明控制部812、关联处理部814、喷出判定部816是通过控制部8的CPU执行规定的处理程序而在控制部8内实现的功能处理部。
照明控制部812以能够与基板处理装置100所具有的各照明器件71通信的方式连接,控制各照明器件71的点亮以及熄灭的动作(照明动作)。照明控制部812也可以独立控制各照明器件71的照明动作,例如在各照明器件71中一边使一个照明器件71点亮一边使其他的照明器件71熄灭等。
关联处理部814具有图像处理部815。图像处理部815对由各相机70获得的各图像PH进行处理。然后,关联处理部814基于图像处理部815的处理结果,确定与确定对象的被摄区域PA对应的各图像PH(即各相机70)。关联处理部814能够基于例如各图像PH的亮度值确定被摄区域PA。另外,关联处理部814能够通过检测后述的各图像PH中的标志物9的位置来确定被摄区域PA。
关联处理部814根据上述确定结果而生成记录有各相机70与各被摄区域PA的关联的关联信息832。关联信息832是表示各相机70的固有的识别信息(例如序列号)与用于识别各被摄区域PA的识别信息(例如各清洗处理单元1的固有的识别信息)的配对(组合)的信息。关联信息832适当地保存在存储部83中。存储部83是存储关联信息832的关联信息存储部的一个示例。
喷出判定部816通过对由各相机70获得的各图像PH进行处理,来判定是否已从各清洗处理单元1中的各喷嘴30喷出了处理液。在该判定处理中,也可以应用例如专利文献1所记载的技术。例如,也可以在配置于处理位置TP1的喷嘴30的喷出头31与基板W之间预先设定判定区域,在该判定区域中,喷出判定部816进行使用了基准图像的图案匹配(patternmatching),由此来判定处理液的喷出。通过喷出判定部816判定各清洗处理单元1中的来自喷嘴30的处理液的喷出,从而能够检测出适当进行基板W的液体处理的清洗处理单元1或者未适当进行基板W的液体处理的清洗处理单元1。
另外,也可以设置判定喷嘴位置的喷嘴位置判定部。例如,在由相机70获得的图像PH上,也可以将判定区域预先设定在与处理位置TP1对应的位置,喷嘴位置判定部通过在该判定区域内进行使用了基准图像的图案匹配来检测喷嘴30的位置。通过检测判定区域中的喷嘴30的位置,能够检测出喷嘴30偏离作为标准的处理位置TP1的位置偏移。
控制部8具有包括上述RAM或磁盘的存储部83。存储部83存储由各相机70拍摄的图像的数据或操作人员的输入值等。
显示部85以及输入部87与控制部8连接。显示部85根据来自控制部8的图像信号显示各种信息。显示部85显示例如由各相机70获得的各图像PH。输入部87由键盘以及鼠标等的输入设备构成,并接受作业人员对控制部8进行的输入操作。
如图5所示,基板处理装置100在12个清洗处理单元1中的每一个清洗处理单元1中,分别具有一个相机70以及一个照明器件71。即,基板处理装置100具有12个相机70和12个照明器件71。并且,各相机70拍摄彼此不同的腔室10内的既定的被摄区域PA。即,各相机70的被摄区域PA彼此不同。以下,在区别各清洗处理单元1的情况下,有时称为“清洗处理单元1(n)”(n为1以上且12以下的整数)等。另外,有时将与各清洗处理单元1(n)对应的相机70以及照明器件71称为“相机70(n)”、“照明器件71(n)”(n为1以上且12以下的整数)等。进而,有时将相机70(n)的被摄区域PA称为“被摄区域PA(n)”(n为1以上且12以下的整数)等。另外,有时将由各相机70(n)获得的图像PH称为“图像PH(n)”(n为1以上且12以下的整数)等。
各相机70与控制部8由串行总线电缆73连接。各相机70与控制部8之间的数据传输方式为串行通信。此外,虽然各相机70(1)至相机70(12)也可以通过共同的电缆连接到控制部8,但是各相机70(1)至相机70(12)也可以通过专用的电缆连接到控制部8。
串行总线电缆73优选为USB(Universal Serial Bus:通用串行总线)。在相机70具有支持如USB那样的即插即用的接口的情况下,仅通过与作为计算机的控制部8连接就能够从控制部8供给电源来使用。在利用作为相机的功能的情况下,按照规定的顺序从程序中读取由相机厂商提供的API(Application Program Interface:应用程序接口)即可。一般而言,还提供了通用应用软件,能够使用这些通用应用软件来获取及保存图像。
在各相机70进行串行通信的情况下,与并行通信相比,能够简化数据通信的结构(例如,通信线、进行同步处理等的处理部),因此比较容易增加相机的数量。
在各相机70进行串行通信的情况下,控制部8能够从该通信包中包含的相机70的固有信息来掌握接收到的图像PH是从哪个相机70发送来的。然而,仅根据发送的信息,控制部8不能唯一地确定该相机70拍摄哪个清洗处理单元1的被摄区域PA。因此,在基板处理装置100中,需要使各相机70与各相机70所拍摄的被摄区域PA建立关联的关联处理。
关联处理部814通过对由各相机70获得的各图像PH进行处理,确定各相机70所拍摄的被摄区域PA。然后,关联处理部814生成表示各相机70与各被摄区域PA的关联的关联信息832。以下,对用于生成关联信息832的各关联处理进行说明。
第一关联处理
图6是示出第一关联处理的流程的一个示例的图。除非特别说明,否则图6所示的关联处理是在控制部8的控制下进行的。在图6所示的示例中,对于各被摄区域PA(1)至被摄区域PA(12),按顺序逐个确定所对应的各相机70。
在该关联处理中,首先,设定第一个被摄区域PA(1)作为确定对象的被摄区域PA(步骤S11)。接着,照明控制部812使对确定对象即被摄区域PA进行照明的照明器件71点亮,使其他各照明器件71熄灭(步骤S12)。首先,在步骤S11中,将清洗处理单元1(1)的被摄区域PA(1)设为确定对象,因而在步骤S12中,照明控制部812使照明器件71(1)点亮,使其他照明器件71(2)至照明器件71(12)熄灭。
在步骤S12之后,所有相机70进行拍摄(步骤S13)。各相机70经由串行总线电缆73将图像数据发送至控制部8。由于发送至控制部8的各图像数据中包含各相机70的固有的识别信息,所以控制部8通过参照图像数据中所包含的固有信息,能够判别是哪个相机70拍摄的。但是,在初始阶段,各相机70的拍摄视场对应于哪个清洗处理单元1的被摄区域PA尚不清楚。
当各图像数据被发送到控制部8时,关联处理部814的图像处理部815进行计算各图像数据所表示的图像PH的平均亮度值(所有像素的亮度值的平均值)的图像处理。然后,关联处理部814从各图像PH中检测出平均亮度值最大的图像PH(步骤S14)。
被照明的被摄区域PH的图像PH比未被照明的被摄区域PA的图像PH相对明亮。特别是在腔室10为暗室的情况下,未进行照明的被摄区域PA的图像PH中的亮度值极小。因此,通过比较各图像PH的各平均亮度值,能够容易地确定与在步骤S12中被照明的被摄区域PA对应的图像PH。
例如,在步骤S12中,在被摄区域PA(1)被照明器件71(1)照明的情况下,由拍摄该被摄区域PA(1)的相机70(1)获得的图像PH(1)相对地变亮,而其他被摄区域PA(2)至被摄区域PA(12)的图像PH(2)至图像PH(12)会变暗。因此,通过计算平均亮度值,能够确定与被摄区域PA(1)对应的相机70(1)。换言之,能够确定与相机70(1)对应的被摄区域PA(1)。
此外,图像处理部815除了平均亮度值以外,还可以计算中间亮度值(所有像素的亮度值的中位值)、亮度值的方差、亮度值的标准偏差等的亮度值的代表值。然后,关联处理部814也可以基于该代表值,检测与被照明的图像对应的图像PH。另外,图像处理部815也可以在预先准备的基准图像与检查对象的图像PH之间取得亮度值的差值,检测该差值超过规定的阈值的图像。
在步骤S14之后,关联处理部814将拍摄了在步骤S13中被提取的图像PH的相机70与在步骤S12中被照明的被摄区域PA相关联(步骤S15)。具体而言,该处理包括生成关联信息832的处理以及将该关联信息832保存于存储部83的处理,在该关联信息832中,描述有表示在步骤S13中被确定的图像PH的相机70的固有信息与表示在步骤S12中被照明的被摄区域PA的识别信息的组合。
在步骤S15之后,控制部8对于所有的相机70,判定是否已完成与各被摄区域PA的关联(步骤S16)。具体而言,控制部8判定是否已完成对于直至第十二个被摄区域PA为止的处理。在步骤S16中,存在并未完成关联的被摄区域PA的情况下(“否”的情况下),关联处理部814将下一个被摄区域PA设定为确定对象(步骤S17)。然后,回到步骤S12,重复执行以后的处理。在步骤S16中,在已完成所有的关联的情况下(“是”的情况下),控制部8完成各相机70与被摄区域PA的关联处理。
如上所述,在第一关联处理中,通过逐个依次地点亮多个照明器件71,能够使各被摄区域PA的照明模式(Lighting pattern)(照明状态或非照明状态)不同。由此,能够使各相机70所获得的各图像PH中与确定对象的被摄区域PA对应的图像PH具有比其他的图像PH更亮的亮度值。因此,能够容易地检测该对应的图像PH。因此,能够适当地确定与各被摄区域PA对应的相机70。
此外,在步骤S12中,也可以仅使与确定对象的被摄区域PA对应的照明器件71熄灭,使其余的照明器件71点亮。在该情况下,能够仅使确定对象的被摄区域PA变暗。因此,在步骤S14中,关联处理部814可以检测由各相机70获得的各图像PH中平均亮度值最小的图像PH作为对应的图像。
根据基板处理装置100,能够使各相机70与各被摄区域PA的关联自动化。因此,能够抑制由于作业人员进行手动作业以及目视确认而引起的作业负担以及人为失误的发生。因此,能够迅速且高精度地进行关联。
第二关联处理
在第一关联处理中,通过使一个照明器件71依次地点亮,对各被摄区域PA应用不同的照明模式。相对于此,在第二关联处理中,多个照明器件71同时被点亮,且对各被摄区域PA应用不同的照明模式。具体而言,对于各照明器件71,通过使点亮的持续时间彼此不同,对各被摄区域PA应用不同的照明模式。
在采用第二关联处理的情况下,各相机70可以进行连续拍摄。连续拍摄是指,以一定间隔连续地拍摄各相机70所对应的被摄区域PA。另外,对于每一个被摄区域PA,使照明器件71的点亮持续的时间的数据作为参照信息834预先保存在存储部83中。关联处理部814可以基于通过连续拍摄获得的各图像数据所表示的亮度值与参照信息834,检测与各被摄区域PA的照明模式一致的图像PH。
例如,对于被摄区域PA(1),使照明器件71(1)点亮一秒,对于被摄区域PA(2),使照明器件71(2)点亮两秒。关联处理部814可以从由各相机70获得的各图像数据中,基于平均亮度值等的亮度值获得适合于各照明模式的图像数据。例如,在各图像中,在与照明器件71(1)对应的相机70(1)的图像数据中,仅包含一秒亮的图像帧,该亮的图像帧具有超过规定阈值的平均亮度值。另外,在来自与照明器件71(2)对应的相机70(2)的图像数据中,仅包含两秒上述亮的图像帧。这样,通过以点亮时间不同的照明模式来照明各被摄区域PA,也能够确定对应的相机70。
在第二关联处理的情况下,通过同时以不同的照明模式来照明所有的被摄区域PA,能够一次性将所有的被摄区域PA与各相机70进行关联。但是,也可以将所有的被摄区域PA分成多个组,按组顺序进行以组为单位的关联处理。
在使照明模式不同的情况下,除了点亮的持续时间以外,还可以考虑改变熄灭的持续时间、点亮次数(熄灭次数)中的至少一者。例如,也可以以熄灭的持续时间不同的照明模式来对各被摄区域PA进行照明。在该情况下,根据照明模式,由各相机70获得的各图像数据仅包含不同的时间的暗的图像帧,该暗的图像帧具有平均亮度值比规定阈值小的平均亮度值。从而,关联处理部814可以通过获得上述暗的图像帧的时间,确定与各被摄区域PA对应的相机70。
第三关联处理
在第三关联处理中,各照明器件71将相互不同颜色的光照射于所对应的被摄区域PA,由此,对各被摄区域PA应用不同的照明模式。各相机70可以具有彩色图像传感器,以能够检测各颜色。对各被摄区域PA用不同的颜色照明,由此,由各相机70获得的各图像PH具有不同的颜色信息。与照射到各被摄区域PA的光的颜色有关的信息作为参照信息834预先保存在存储部83中。然后,关联处理部814可以通过图像处理来确定各图像PH所具有的颜色信息,并且通过参照参照信息834,确定照射有与该颜色信息对应的颜色的光的被摄区域PA。
在第三关联处理的情况下,通过以不同的颜色来同时对所有的被摄区域PA中的各被摄区域PA进行照明,能够一次性将所有的被摄区域PA与各相机70进行关联。但是,也可以将所有的被摄区域PA分成多个组,按组顺序进行以组为单位的关联处理。
第四关联处理
在第四关联处理中,各照明器件71在由各相机70获得的各图像PH间以使亮度值分布不同的方式来对各被摄区域PA进行照明,由此,对各被摄区域PA应用不同的照明模式。
图7是示意性地示出在第四关联处理中由相机70(1)获得的图像PH(1)的图。图8是示意性地示出在第四关联处理中由相机70(2)获得的图像PH(2)的图。图9是示意性地示出在第四关联处理中由相机70(3)获得的图像PH(3)的图。图10是示意性地示出在第四关联处理中由相机70(4)获得的图像PH(4)的图。各图像PH(1)至图像PH(4)分别包含一个或多个亮区域LA1。亮区域LA1是具有相对明亮(亮度值比规定阈值大)的亮度值的像素的集合。亮区域LA1的位置在各图像PH(1)至图像PH(4)之间不同。例如,亮区域LA1在图像PH(1)中位于靠左上的位置,在图像PH(2)中位于靠左下的位置,在图像PH(3)中位于靠右上的位置,在图像PH(4)中位于靠左下的位置以及靠右上的位置。
如图7至图10所示,为了在各图像PH间使亮区域LA1的位置不同,例如可以在各照明器件71间使相对于被摄区域PA的相对配置位置或照明方向等不同。例如,也可以由配置于各腔室10内的不同位置的多个发光体构成各照明器件71。然后,照明控制部812可以以与预先设定的亮度值分布对应的模式来使各照明器件71的各发光体发光。由此,能够在由各相机70获得的图像PH间使亮度值分布的模式不同。
在采用第四关联处理的情况下,表示对各被摄区域PA中的每一个被摄区域PA应用的亮度值分布的模式的数据被作为参照信息834而预先保存在存储部83中。然后,图像处理部815可以检测亮区域LA1,关联处理部814基于参照信息834来确定与检测出的亮区域LA1所对应的亮度值分布模式一致的被摄区域PA。
在第四关联处理的情况下,能够一次性地将多个被摄区域PA与各相机70进行关联。此外,也可以将所有的被摄区域PA分成多个组,依次进行以组为单位的关联处理。
第五关联处理
在第五关联处理中,基于被配置于各被摄区域PA内的适当位置的标志物9,将各相机70与各被摄区域PA进行关联。标志物9例如是配置在各清洗处理单元1的腔室10内且显示用于识别各被摄区域PA的固有的识别信息的构件。
图11是示意性地示出在第五关联处理中由相机70(1)获得的图像PH(1)的图。图12是示意性地示出在第五关联处理中由相机70(2)获得的图像PH(2)的图。图13是示意性地示出在第五关联处理中由相机70(3获得的图像PH(3)的图。图14是示意性地示出在第五关联处理中由相机70(4)获得的图像PH(4)的图。各图像PH(1)至图像PH(4)分别包含一个标志物9的像。各标志物9显示用于识别配置有各标志物9的被摄区域PA的识别信息。图11至图14所示的各标志物9显示设定有被摄区域PA的清洗处理单元1的识别信息,具体而言,显示如“MPC1”、“MPC2”…这样的文字。各标志物9除了文字以外,也可以用记号、图形或它们的组合来显示对应的被摄区域PA的识别信息。
在采用第五关联处理的情况下,各标志物9所显示的识别信息作为参照信息834被预先保存在存储部83中。图像处理部815对由相机70获得的各图像PH进行处理,由此检测图像PH中所包含的标志物9的像所表示的识别信息。作为此时应用的图像处理,也可以应用例如图案识别。关联处理部814基于提取的识别信息与参照信息834,确定与各图像PH对应的被摄区域PA。此外,也可以对包含标志物9的像的图像PH应用通过机器学习而获得的学习完毕的模型来确定与该图像PH对应的被摄区域PA。
在第五关联处理的情况下,能够从由各相机70获得的图像PH中包含的标志物9来直接确定被摄区域PA。因此,能够适当地将各相机70与各相机70所对应的被摄区域PA进行关联。
在第五关联处理的情况下,能够一次性地将多个被摄区域PA与各相机70进行关联。此外,也可以将所有的被摄区域PA分成多个组,按组顺序进行以组为单位的关联处理。
第六关联处理
在第五关联处理中,作为被配置在各被摄区域PA内的适当位置的标志物,显示各被摄区域PA的固有的识别信息。在第六关联处理中,将配置于各清洗处理单元1的可动部作为标志物。可动部可以是由控制部8来控制位置的构件。
图15是示意性地示出在第六关联处理中由相机70(1)获得的图像PH(1)的图。图16是示意性地示出在第六关联处理中由相机70(2)获得的图像PH(2)的图。图17是示意性地示出在第六关联处理中由相机70(3获得的图像PH(3)的图。图18是示意性地示出在第六关联处理中由相机70(4)获得的图像PH(4)的图。在图15至图18所示的示例中,作为可动部之一的喷嘴30被作为标志物,在各被摄区域PA中的确定对象的一个被摄区域PA中,喷嘴30(详细而言,喷出头31)被配置在旋转底座21的中心附近的位置L11,在其他的被摄区域PA中,喷嘴30被配置在从旋转底座21的上方离开的位置L12。由此,在各图像PH中的仅一个图像PH中,喷嘴30配置于位置L11,在其他的图像PH中,喷嘴30配置于位置L12。在图15至图18所示的示例中,在图像PH(1)中,喷嘴30配置于位置L11,在其他的图像PH(2)至图像PH(4)中,喷嘴30的喷出头31配置于位置L12。因此,可知与确定对象的被摄区域PA对应的相机70为相机70(1)。这样,对于各被摄区域PA,依次使可动部移动,由此能够针对所有的被摄区域PA确定对应的相机70。
第七关联处理
在第六关联处理中,通过使可动部逐个移动,来逐个确定与被摄区域PA对应的相机70。在第七关联处理中,在各被摄区域PA中,使各可动部相对地移动至不同的位置。另外,针对由各相机70获得的各图像PH,检测可动部的位置,由此确定与各被摄区域PA对应的相机70。
图19是示意性地示出在第七关联处理中由相机70(1)获得的图像PH(1)的图。图20是示意性地示出在第七关联处理中由相机70(2)获得的图像PH(2)的图。图21是示意性地示出在第七关联处理中由相机70(3获得的图像PH(3)的图。图22是示意性地示出在第七关联处理中由相机70(4)获得的图像PH(4)的图。在图19至图22中,作为可动部之一的喷嘴30被作为标志物,在各被摄区域PA中使各喷嘴30移动至相对不同的位置。在图19至图22所示的示例中,在各图像PH(1)至图像PH(4)之间,喷嘴30的相对位置是不同的。具体而言,喷嘴30的喷出头31在图像PH(1)中被配置于旋转底座21上的右缘附近的位置L21,在图像PH(2)中被配置于从旋转底座21上离开的位置L22,在图像PH(3)中被配置于旋转底座21的中心附近的位置L23,在图像PH(4)中被配置于旋转底座21上的左缘附近的位置L24。
在采用第七关联处理的情况下,在各被摄区域PA中,配置可动部的位置作为参照信息834被预先保存在存储部83中。另外,关联处理部814通过对由各相机70获得的各图像PH进行处理,来检测各图像PH中的可动部(例如喷嘴30的喷出头31),并且检测可动部在各图像PH中的位置。可动部的检测例如能够应用进行与预先准备的基准图像的图案匹配的图案识别。另外,可动部的位置的获取也可以利用通过机器学习而获得的学习完毕的模型。关联处理部814通过参照参照信息834来确定与检测出的可动部的位置一致的被摄区域PA。由此,能够适当地将各相机70与各被摄区域PA进行关联。
在第七关联处理的情况下,能够将多个被摄区域PA同时与各相机70进行关联。此外,也可以将所有的被摄区域PA分成多个组,按组顺序进行以组为单位的关联处理。
此外,作为标志物的可动部不限定于喷嘴30。例如,除了喷嘴60、65以外,也可以考虑将卡盘销26作为标志物。另外,不仅可以使一个可动部移动,还可以使多个可动部移动。即,能够通过在各被摄区域PA之间变更多个可动部的配置,使在由各相机70获得的各图像PH之间的可动部的位置不同。因此,通过在各图像PH中检测多个可动部的位置,能够针对各图像PH适当地确定对应的被摄区域PA。
2.第二实施方式
接着,对第二实施方式进行说明。此外,在以后的说明中,对于具有与已说明的要素相同功能的要素,有时赋予相同的附图标记或追加了字母的附图标记,并省略详细说明。
图23是第二实施方式的清洗处理单元1A的概略俯视图。清洗处理单元1A具有两个相机70a、70b。各相机70a、70b的视场被设定在不同的位置。因此,各相机70a、70b拍摄不同的被摄区域PAa、PAb。另外,虽然省略了图示,但是相机70a、70b通过串行通信将拍摄获得的图像数据发送至控制部8。
在图23所示的示例中,相机70a将被摄区域PAa作为拍摄对象,相机70b将被摄区域PAb作为拍摄对象。控制部8接收通过串行通信从各相机70a、70b发送来的图像数据。虽然在该图像数据中包含各相机70a、70b的固有的识别信息(例如序列号),但是控制部8无法在控制部8侧确定该序列号是否对应于相机70a、70b中的某一个或者对应于哪个被摄区域PA。因此,为了监视各被摄区域PAa、PAb,需要建立各相机70a、70b与各被摄区域PAa、PAb的关联。
关联处理部814生成将各相机70a、70b与各被摄区域PAa、PAb进行关联的关联信息832。关联处理部814基于图像处理部815对各相机70a、70b获得的各图像PH的处理,确定对应的被摄区域PAa、PAb。
相机70a、70b在相同的清洗处理单元1的腔室10内以不同的视场进行拍摄。因此,由各相机70a、70b获得的各图像PH具有不同的信息。具体而言,在比较两个图像PH时,除了在该两个图像PH中包含不同的物体的像的情况以外,也有相同的物体的像包含于相对不同的位置的情况。因此,例如,通过从图像处理部815检测用于识别的物体(或者该物体的位置),关联处理部814也可以检测与被摄区域PA对应的图像PH。在该情况下,作为参照信息834,可以将每个被摄区域PA的作为检测对象的物体的信息(物体的像的图像、位置信息)预先保存在存储部83中。
也可以在各被摄区域PAa、PAb配置固有的标志物。在该情况下,图像处理部815可以在由各相机70a、70b获得的各图像PH中通过图案识别等的图像处理来检测各标志物。根据该处理结果,关联处理部814可以确定与各图像PH对应的被摄区域PAa、PAb。
标志物例如也可以如图11至图14所示的标志物9那样设置在各被摄区域PAa、PAb,在各被摄区域PAa、PAb中以文字、图形、记号或它们的组合来显示固有的识别信息。或者,如图15至图18以及图19至图22中所说明的那样,也可以将喷嘴30等的可动部作为标志物。例如,可以使喷嘴30移动至被摄区域PAa、PAb。
此外,基板处理装置100也可以具有多个清洗处理单元1A。在该情况下,也可以应用第一实施方式中所说明的处理和第二实施方式中所说明的处理。具体而言,如在上述“第一关联处理”中所说明的那样,逐个依次地点亮各清洗处理单元1A的各照明器件71。由此,由所照明的清洗处理单元1A的相机70a、70b获得的两个图像PH相对变亮,因而能够容易地确定配置于该清洗处理单元1A的相机70a、70b。此外,关联处理部814进行本实施方式中所说明的关联处理,由此能够适当地将相机70a、70b与各相机70a、70b所拍摄的各被摄区域PAa、PAb进行关联。
虽然已经详细说明了本发明,但是上述说明在所有的形态中均为示例,本发明不限定于此。可以理解为在不脱离本发明的范围的情况下,可以设想未例示的无数变形例。在上述各实施方式及各变形例中说明的各结构只要不相互矛盾,就能够适当地组合或省略。
附图标记说明
100:基板处理装置、
1、1A:清洗处理单元、
10:腔室、
20:旋转卡盘、
21:旋转底座、
22:旋转马达(spin motor)、
24:旋转轴
26:卡盘销(可动部)
30、60、65:喷嘴(可动部)、
31:喷出头、
332:马达(喷嘴驱动部)、
40:处理杯、
70、70a、70b:相机、
71:照明器件、
73:串行总线电缆、
8:控制部、
83:存储部、
85:显示部、
87:输入部、
812:照明控制部、
814:关联处理部、
815:图像处理部、
832:关联信息、
834:参照信息、
9:标志物、
LA1:亮区域、
PA:被摄区域、
PAa,PAb:被摄区域、
PH:图像、
W:基板。
- 基板用清洗件、基板清洗装置、基板处理装置、基板处理方法以及基板用清洗件的制造方法
- 基板液处理装置、基板液处理方法以及基板处理装置