一种安全型双杠及危险动作识别方法
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及体育器材技术领域,具体的说是一种安全型双杠及危险动作识别方法。
背景技术
双杠是由四根立柱架设两根平行的横杠组成,正式比赛中,双杠的成套动作由摆动、摆越、屈伸、弧形摆动、回环、空翻和静止用力等组成,成套动作要求以摆动和腾空为主,而在民间和中小学校园的双杠多是健身娱乐和简单教学为主,做一些基础动作,从而达到强身健体、锻炼体魄的目的。
中小学校园的双杠多是放在室外,在老师的看护下指导学生练习双杠动作,但是中小学的学生还是孩童少年,正是爱玩的年纪,在课余时间没有老师的看护和指导下,也常常去双杠上玩耍,这种情况下,学生们经常不按照教学动作练习,而是做出一些高风险的危险性动作,比如站立字在双杠上,在双杠上倒挂等,即使现在一些校园的双杠下标配有垫子,但是这些危险动作一旦发生危险,学生们从横杠上掉下,依然会对学生造成伤害,严重的甚至会造成骨折、扭伤,具有较大的安全隐患,同时爱玩是孩童的天性,如何在满足学生们娱乐玩耍的同时又兼顾安全性并降低安全隐患,不至于彻底阻止学生们爱玩的童年,又能减少学生们爱玩所付出的伤痛代价,因此就提出了一种安全型双杠及危险动作识别方法。
发明内容
为了解决现有技术中的不足,本发明提供一种安全型双杠及危险动作识别方法,旨在解决学生们在双杠上因爱玩做出危险动作有较大安全隐患的问题。
为了实现上述目的,本发明采用的具体方案为:一种安全型双杠,包括横杠、设在横杠底部的立柱以及设在立柱所在地面的缓冲垫,
安全型双杠还包括总控制器、识别系统和保护装置,识别系统用于识别是否有人在双杠上做危险动作并确定实施危险动作的人所在位置,保护装置在识别系统识别到有人做危险动作后经总控制器控制对应实施危险动作的人所在位置的保护装置启动以保护人的安全;
识别系统包括计时器、第一红外传感器、第二红外传感器、第三红外传感器、第四红外传感器、压力传感器以及设在横杠两端的竖直杆,位于两个竖直杆上部之间的位置架设有横向的水平杆,第一红外传感器设置在竖直杆的上部,第二红外传感器设置在水平杆上,第一红外传感器和第二红外传感器用于监测是否有人站立在横杠上,第三红外传感器设置在横杠内,第三红外传感器为多组沿横杠长度方向排列设置,每组第三红外传感器由同一横杠内依次排列的多个第三红外传感器组成,两个横杠内的第三红外传感器相互对称,第三红外传感器用于确定人在横杠上的位置,第四红外传感器设置在立柱内,以用于监测是否有人处在同一横杠的两个立柱之间,压力传感器设置在缓冲垫内并与第三红外传感器的位置一一对应;
任一竖直杆上的第一红外传感器与其感应范围内的多组第三红外传感器共同组成监测区I,水平方向另一个横杠上对应监测区I的位置为监测区II,水平杆上第二红外传感器与两个横杠上位于该第二红外传感器感应范围内的第三红外传感器共同组成监测区III;
任一立柱内的第四红外传感器与其感应范围内的第三红外传感器共同组成监测区IV;
第一红外传感器、第二红外传感器、第三红外传感器、第四红外传感器、压力传感器、计时器以及保护装置均与总控制器电性连接。
作为上述技术方案的进一步优化:所述保护装置包括设在横杠上方的顶棚和设在顶棚上的升降保护器,升降保护器由多个沿横杠长度方向间隔排列的第一侧边升降保护器和第一中间升降保护器组成,第一侧边升降保护器设置在顶棚上对应两个横杠外侧的位置,第一中间升降保护器设置在顶棚上对应两个横杠之间的位置,第一中间升降保护器和第一侧边升降保护器均与横杠上位置相对应的第三红外传感器通过总控制器电性连接;
每个第一侧边升降保护器和第一中间升降保护器均包括可升降设置的保护杆和设置在保护杆一侧的固定架,保护杆的底端设有第一保护垫,保护杆上设有连接杆,固定架的侧壁开有供连接杆穿入的条形孔,条形孔沿固定架长度方向设置,固定架上设有第一电机,第一电机的输出轴与设在固定架顶部的转轮传动连接,转轮上套设有钢丝绳,钢丝绳的一端吊装设在固定架内的配重块,另一端与伸入固定架内部的连接杆连接。
作为上述技术方案的进一步优化:所述第一侧边升降保护器和第一中间升降保护器设置在顶棚的上表面,顶棚上对应每个第一侧边升降保护器和第一中间升降保护器的保护杆处均开有供保护杆穿过通孔,通孔内设有电控阀,每个电控阀均与位置相对应的若干第三红外传感器通过总控制器电性连接,每个保护杆上均设有上限位环和下限位环,上限位环和下限位环的外径与通孔的内径相同。
作为上述技术方案的进一步优化:所述第一侧边升降保护器的第一保护垫均朝向横杠的方向倾斜设置,第一中间升降保护器的第一保护垫为两边朝向两个横杠倾斜的梯形结构,且每个第一保护垫上均设有与总控制器电性连接并用于升起第一保护垫的紧急开关,每个第一保护垫的底部均敞口设置,敞口处设有用于固定腿部的第一腿部限位器,第一腿部限位器可随着第一保护垫的下降固定在横杠上做危险动作的人腿部;
第一腿部限位器包括缓冲板和缓冲杆,缓冲板的两侧通过第一弹簧与第一保护垫内壁连接,缓冲板的底部开有多个供腿部进入的卡槽,缓冲板套设在缓冲杆上,缓冲杆的顶端与第一保护垫的内壁滑动配合,缓冲杆上套设有第二弹簧,且缓冲杆位于第二弹簧和缓冲板之间的杆体上设有推块。
作为上述技术方案的进一步优化:相邻两个卡槽之间的距离相同,且相邻两个卡槽之间以及位于缓冲板两侧的卡槽和缓冲板内壁之间均设有用于引导腿部进入卡槽的导向轮,第一保护垫的底部两侧也设有导向轮,保护杆的底端滑动设置在第一保护垫顶壁的第一滑槽内,缓冲杆的顶端滑动设置在第一保护垫内壁的第一滑槽内,以通过导向轮带动第一保护垫或缓冲板移动,进而在第一保护垫下降过程中将位置偏离卡槽的腿部引导入卡槽内。
作为上述技术方案的进一步优化:所述保护装置包括多个设在地面并沿横杠长度方向排列的的第二中间升降保护器和第二侧边升降保护器,第二中间升降保护器对应两个横杠中间的位置,第二侧边保护器分别对应两个横杠外侧的位置,第二中间升降保护器和第二侧边升降保护器均与横杠上位置相对应的第三红外传感器通过总控制器电性连接;
缓冲垫上开有多个通孔,每个第二中间升降保护器和第二侧边升降保护器均包括预埋在地面以下的齿条杆和设在缓冲垫通孔内的第二保护垫,齿条杆的顶端与第二保护垫连接,齿条杆上啮合有齿轮,齿轮套设在第二电机传动轴上。
作为上述技术方案的进一步优化:所述第二侧边升降保护器的第二保护垫均朝向横杠的方向倾斜设置,第二中间升降保护器的第二保护垫为两边朝向两个横杠倾斜的梯形结构,且每个第二保护垫上均设有与总控制器电性连接的紧急开关,每个第二保护垫的倾斜面上开有多个均匀间隔分布的凹槽,每个凹槽内均设有用于固定腿部的第二腿部限位器,以随着第二保护垫的上升固定在横杠上做危险动作的人腿部;
第二腿部限位器包括多个弧形的橡胶垫和连接在橡胶垫内侧的伸缩杆,多个橡胶垫相互拼接组成供腿部进入的容腔,位于凹槽顶部两侧的橡胶垫上铰接有可扣合在容腔顶部的限位板,限位板的铰接点上套设有扭簧,第二保护垫上位于每个限位板的上方均设有用于阻挡限位板向上翻转的限位座,凹槽的底部连通有供腿部进入的缓冲槽,位于凹槽底部的橡胶垫可通过其上的伸缩杆进出缓冲槽,从而使腿部通过容腔进入缓冲槽后,限位板复位,进而在限位板的作用下将腿部固定在容腔中。
作为上述技术方案的进一步优化:所述限位座的表面具有朝向对应容腔倾斜的导向面,导向面上朝向容腔的方向排列分布有多个滚轴,齿条杆的顶端滑动设置在第二保护垫底壁的第二滑槽内,以通过滚轴带动第二保护垫移动,进而使第二保护垫上升过程中将位置偏离容腔的腿部引导入容腔内。
所述安全型双杠的一种危险动作识别方法,所述方法包括:
识别是否有人站立在横杠上,包括:
监测区I或监测区II中的第一红外传感器和第三红外传感器同时触发输出信号,并且该第三红外传感器对应位置的压力传感器无信号输出;
监测区III中的第二红外传感器和两个横杠上水平对应的两组第三红外传感器同时触发输出信号,并且该第三红外传感器对应位置的压力传感器无信号输出;
满足以上任一条件则识别为有人站立在横杠上并确定其位置,同时触发对应位置的保护装置启动,上述条件中,首次满足该条件的第三红外传感器输出信号一直存在,则不触发其它满足该条件的保护装置启动,否则触发启动;
识别是否有人倒挂在横杠上,包括:
监测区IV中第四红外传感器和第三红外传感器同时触发信号,并且在此之前该第三红外传感器对应的压力传感器满足由输出信号状态至信号中断状态,则计时器开始计时并超过一定时间;
监测区IV中的第三红外传感器和第四红外传感器由输出信号状态至信号中断状态,该监测区IV水平方向对应的另一监测区IV中的第三红外传感器和第四红外传感器依次输出信号状态并保持,并且此时这两个第三红外传感器对应的压力传感器未输出信号,则计数器开始计时并超过一定时间;
水平方向对应的两个监测区IV中第三红外传感器同时触发输出信号,之后其中一个第三红外传感器信号中断,另一个第三红外传感器所在监测区IV中的第四红外传感器触发输出信号,并且监测对应位置的压力传感器无信号输出,则计数器开始计时并超过一定时间;
满足以上任一条件则识别为有人倒挂在横杠上并确定其位置,同时触发对应位置的保护装置启动,上述条件中,当首次满足该条件的第三红外传感器输出信号一直存在,不触发其它满足该条件的保护装置启动,否则触发启动。
作为上述技术方案的进一步优化:总控制器在满足任一上述条件启动对应的保护装置时,接收到对应的压力传感器再次触发输出信号则控制保护装置停止启动。
与现有技术相比,本发明的有益效果如下:
1)本发明的识别系统,能够自动识别横杠上是否有人做危险动作,并且确定做危险动作的人所在位置,进而总控制器控制对应位置的保护装置启动,保护做危险动作人的安全,同时又不影响双杠上其他做正常动作的人,从而降低做危险动作的安全隐患;
2)本发明通过两组侧边升降保护器和一组中间升降保护器,在学生做危险动作时进行防护,降低危险性,并且通过升降保护器的保护,学生可适当在双杠上做这些喜欢做的动作,站立在双杠上行走或者倒挂在双杠,增加了趣味性,满足学生爱玩的天性又降低了做这些危险动作的安全隐患。
附图说明
图1为本发明学生在现有的双杠上做危险动作示意图;
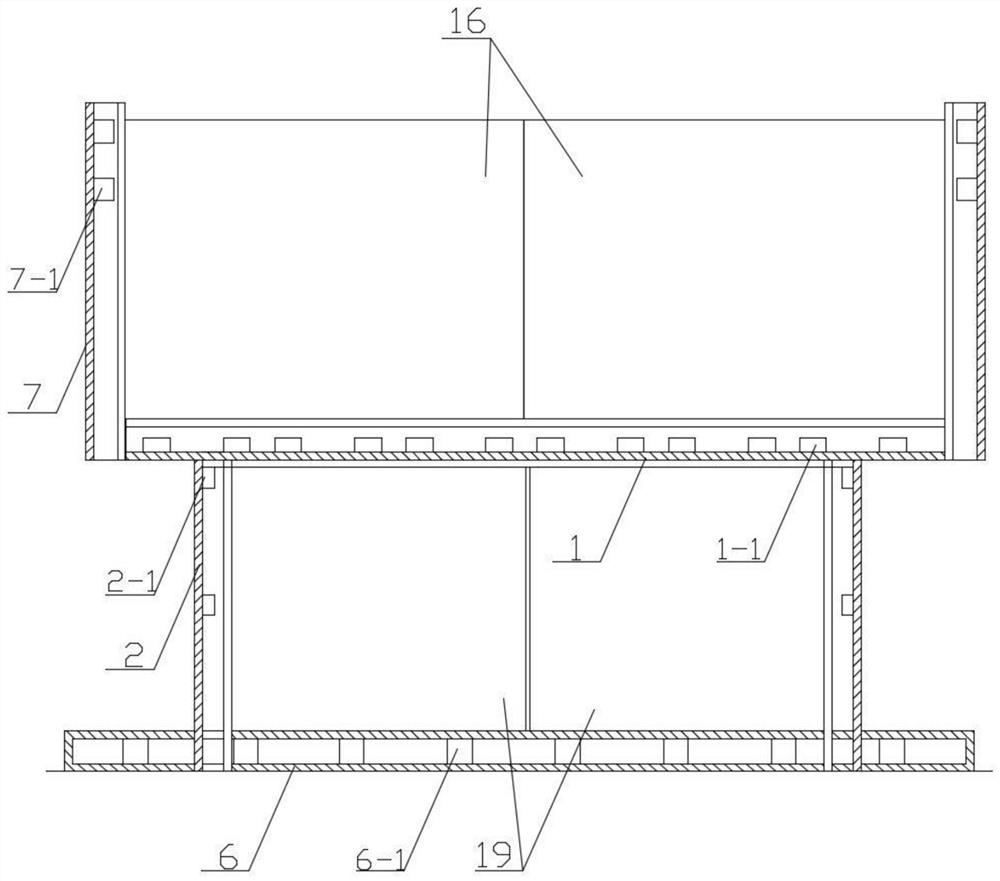
图2为本发明识别系统监测区示意图;
图3为本发明识别系统监测区立体模型示意图;
图4为本发明实施例1立体结构示意图;
图5为本发明实施例1主视图;
图6为本发明实施例1侧视图;
图7为本发明实施例1升降保护器主视图;
图8为本发明实施例1升降保护器侧视图;
图9为本发明实施例1第一保护垫剖视图;
图10为本发明实施例2立体结构示意图;
图11为本发明实施例2主视图;
图12为本发明实施例2侧视图;
图13为本发明实施例2第二保护垫剖视图;
图14为图13中A处放大图;
图15为本发明实施例1和2的横杠表面示意图;
图中标记:1、横杠,1-1、第三红外传感器,2、立柱,2-1、第四红外传感器,3、顶棚,3-1、电控阀,4、第一中间升降保护器,5、第一侧边升降保护器,5-1、保护杆,5-2、第一保护垫,5-3、固定架,5-4、转轮,5-5、钢丝绳,5-6、配重块,5-7、下限位环,5-8、上限位环,5-9、连接杆,5-10、条形孔,5-11、第一滑槽,6、缓冲垫,6-1、压力传感器,7、竖直杆,7-1、第一红外传感器,8、水平杆,8-1、第二红外传感器,9、第一电机,10、缓冲板,10-1、第一弹簧,10-2、卡槽,10-3、导向轮,11、缓冲杆,11-1、第二弹簧,11-2、推块,12、紧急开关,13、第二中间升降保护器,14、第二侧边升降保护器,14-1、齿条杆,14-2、齿轮,14-3、第二保护垫,14-4、凹槽,14-5、橡胶垫,14-6、限位板,14-7、容腔,14-8、伸缩杆,14-9、限位座,14-10、滚轴,14-11、缓冲槽,14-12、第二滑槽,15、第二电机,16、监测区I,17、监测区II,18、监测区III,19、监测区IV。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术学生员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种安全型双杠,包括横杠1、设在横杠1底部的立柱2以及设在立柱2所在地面的缓冲垫6,安全型双杠还包括总控制器、识别系统和保护装置,识别系统包括计时器、第一红外传感器7-1、第二红外传感器8-1、第三红外传感器1-1、第四红外传感器2-1、压力传感器6-1以及设在横杠1两端的竖直杆7,位于两个竖直杆7上部之间的位置架设有横向的水平杆8,第一红外传感器7-1设置在竖直杆7的上部,第二红外传感器8-1设置在水平杆8上,第一红外传感器7-1和第二红外传感器8-1用于监测是否有学生站立在横杠1上,因不同学生的身高不同,第一红外传感器7-1可以设置多个,保证精度以匹配不同学生的站立高度,同时又不影响做正常动作的学生,同理水平杆8也可设置多个,使第二红外传感器8-1满足不同的高度,第三红外传感器1-1设置在横杠1内并沿其长度方向排列设置,因每个保护装置对应在横杠1上的位置为一片片小区域,为了实现识别学生在横杠1上的位置并保证精度,第三红外传感器1-1为多组,一组对应横杠1上的一片区域,只要该区域的任意一个第三红外传感器1-1触发输出信号,即可认定该区域为触发信号状态,在最终保护装置满足所有条件在该区域启动时,即可保护在该区域的学生安全,第四红外传感器2-1设置在立柱2内,以用于监测是否有学生处在同一横杠1的两个立柱2之间,第四传感器也可设置多个,增加识别精度,压力传感器6-1设置在缓冲垫6内并与横杠1上一个个区域的位置一一对应,压力传感器6-1为多组,每组压力传感器6-1包括沿横杠1宽度方向排列的多个压力传感器6-1,一组压力传感器6-1对应两个横杠1内同一个区域的第三红外传感器1-1,即一组压力传感器6-1可用于监测该区域第三红外传感器1-1下方缓冲垫6上沿横杠1宽度方向横向一排的受力情况。第一红外传感器7-1、第二红外传感器8-1、第三红外传感器1-1、第四红外传感器2-1、压力传感器6-1、计时器以及保护装置均与总控制器电性连接,任一竖直杆7上的第一红外传感器7-1与其感应范围内的多组第三红外传感器1-1共同组成监测区I16;水平方向另一个横杠1上对应监测区I16的位置为监测区II17;水平杆8上第二红外传感器8-1与两个横杠1上位于该第二红外传感器8-1感应范围内的第三红外传感器1-1共同组成监测区III18;任一立柱2内的第四红外传感器2-1与其感应范围内的第三红外传感器1-1共同组成监测区IV19;如2图和3所示,其中,监测区I16为个,在同一横杠1的两个竖直杆7之间相对设置,监测区II17则为另一个横杠1的两个竖直杆7之间相对设置,监测区III18为两个,在两个水平杆8之间相对设置,即两个横杠1中间的位置,监测区IV19为个,在同一横杠1的立柱2之间相对设置两个。
识别系统的识别功能,中小学生正处在爱玩的年纪,在无成年打人看护和指导的情况下,如图1所示,在双杠上玩耍喜欢做出的危险动作主要由站立在杠上和倒挂在杠上组成,因此识别系统主要监测双杠上是否有学生做出这两个动作,即识别为危险动作。一种危险动作识别方法,包括:
识别是否有学生站立在横杠1上,首先将学生在横杠1上站立的情况分为以下两种:双脚站立在一根横杠1上;双脚分别站立在两根横杠1上;则包括以下条件:
监测区I17或监测区II17中的第一红外传感器7-1和第三红外传感器1-1同时触发信号,并且该第三红外传感器1-1对应位置的压力传感器6-1无信号输出,即为双脚站立在一根横杠1上;
监测区II18I中的第二红外传感器8-1和两个横杠1上水平对应的两组第三红外传感器1-1同时触发输出信号,并且该第三红外传感器1-1对应位置的压力传感器6-1无信号输出,即为双脚分别站立在两根横杠1上;
满足以上任一条件则识别为有学生站立在横杠1上并确定其位置,同时触发对应第三红外传感器1-1位置的保护装置启动,值得注意的是,由于横杠1上方用于感应是否有人站立的第一红外传感器7-1和第二红外传感器8-1在以有学生站立的情况下,无法监测是否有第二个学生是否站立,则此时有其他学生在横杠1上正常玩耍,易误启动保护装置,因此在上述条件中,当首次满足该条件的第三红外传感器1-1输出信号一直存在,不触发其它满足该条件的保护装置启动,否则触发启动;
识别是否有人倒挂在横杠1上,首先将学生在横杠1上倒挂的情况分为以下三种:从一根横杠1的下方直接倒挂在该横杠1上;双手握住一根横杠1,双脚搭在另一根横杠1上最终倒挂在双脚所处的横杠1上;先上到横杠1上方并从横杠1上方完成倒挂动作;值得注意的是,第三种从横杠1上方完成倒挂动作的情况,一般上到哪根横杠1则在哪根横杠1上完成倒挂动作,考虑到在以坐至一根横杠1上后,在不下来的情况下直接从横杠1上方换至另一个横杠1并完成倒挂动作的难度较大,且较为少见,故不作考虑,因倒挂在横杠1上的动作存在方向上的问题,学生脸的朝向在不同情况下有所不同,方向关系到启动横杠1不同侧的保护装置,又因为无论从横杠1上方还是下方完成倒挂动作,一般学生在完成倒挂动作时,身体都是从横杠1的外侧依次完成弯曲至垂下的动作,即从横杠1的外侧形成一个弧线,而从横杠1的内侧完成这个动作则会受另一个横杠1的阻挡和影响,因此从横杠1内侧完成倒挂动作的情况不予考虑,故第一种情况下,学生脸朝向横杠1外侧,第二种情况下学生脸朝向横杠1内侧,第三种情况下学生脸朝向横杠1外侧,则识别是否有人倒挂在横杠1上,包括:
监测区IV19中第四红外传感器2-1和第三红外传感器1-1同时触发信号,并且在此之间该第三红外传感器1-1对应的压力传感器6-1由输出信号状态切换至信号中断状态,则计时器开始计时并超过一定时间,即为从一根横杠1的下方直接倒挂在该横杠1上;
监测区IV19中的第三红外传感器1-1和第四红外传感器2-1由输出信号状态至信号中断状态,该监测区IV19水平方向对应的另一监测区IV19中的第三红外传感器1-1和第四红外传感器2-1依次输出信号并保持,并且此时这两个第三红外传感器1-1对应的压力传感器6-1未输出信号,则计时器开始计时并超过一定时间,即为从横杠1下方双手握住一根横杠1,双脚搭在另一根横杠1上并倒挂的情况;
水平方向对应的两个监测区IV19中第三红外传感器1-1同时触发输出信号,之后其中一个第三红外传感器1-1信号中断,另一个红外传感器所在监测区IV19中的第四红外传感器2-1触发输出信号,并且监测对应位置的压力传感器6-1无信号输出,则计数器开始计时并超过一定时间,即为先上至双杠上方并完成倒挂动作的情况;
满足以上任一条件则识别有人倒挂在横杠1上并确定其位置和倒挂的方向,同时触发对应位置的保护装置启动,值得注意的是,上述条件中,首次满足该条件的第三红外传感器1-1输出信号一直存在,不触发其它满足该条件的保护装置启动,否则触发启动,并且由于识别倒挂动作的条件中存在压力传感器6-1从触发输出信号到无信号输出的状态切换,为了避免保护装置在启动时,对双杠附近的学生造成影响,或者在保护装置没有完全启动完成时,学生已经不再做倒挂动作,则当总控制器监测到满足条件中的压力传感器6-1再次输出信号则保护装置停止启动;
由于识别倒挂动作的情况较为复杂,不排除有学生做的一些特殊动作误启动保护装置,并且上述第三种完成倒挂的情况也比较少见,一般都是从横杠1下方腿部勾住横杠1直接完成倒挂动作,而学生做出一些造成误启动保护装置的特殊动作往往无法坚持较长的时间,而倒挂动作在做出后,相对轻松,因此在识别倒挂动作的条件中加入计时器,只有当计时器计时至一定时间后,保护装置启动,一般设置10s左右即可,而在满足条件时没有持续至10s左右的规定时间,满足条件的状态消失,则计时器归零,并且如果有先一个学生在一个横杠1上倒挂,启动了中间升降保护器,而此时又有一个学生在水平位置的另一个横杠1上站立,则因中间升降保护器以启动过,总控制器只需控制站立学生所在横杠1的侧边升降保护器启动即可,而且中小学生所用的双杠一般高度较低,学生身高普遍高于横杠1,在横杠1的底部位于两个立柱2之间不易长时间做其他动作。
实施例1
本实施例是一种保护装置的实施方式,一个保护装置可同时满足站立在横杠1或倒挂在横杠1这两种情况的保护需求。
如图4、5和6所示,保护装置包括设在横杠1上方的顶棚3和设在顶棚3上的升降保护器,升降保护器由多个沿横杠1长度方向排列的第一侧边升降保护器5和第一中间升降保护器4组成,第一侧边升降保护器5设置在顶棚3上对应两个横杠1外侧的位置,第一中间升降保护器4设置在顶棚3上对应两个横杠1之间的位置,第一中间升降保护器4和第一侧边升降保护器5均与横杠1上位置相对应的第三红外传感器1-1通过总控制器电性连接,一般的,一个第一侧边升降保护器5或第一中间升降保护器4对应的为横杠1上一组第三红外传感器1-1,如图7和8所示,每个第一侧边升降保护器5和第一中间升降保护器4均包括可升降设置的保护杆5-1和设置在保护杆5-1一侧的固定架5-3,保护杆5-1的上部设有连接杆5-9,固定架5-3的侧壁开有供连接杆5-9穿入的条形孔5-10,条形孔5-10沿固定架5-3长度方向设置,固定架5-3上设有第一电机9,第一电机9的输出轴与设在固定架5-3顶部的转轮5-4传动连接,转轮5-4上套设有钢丝绳5-5,钢丝绳5-5的一端吊装设在固定架5-3内的配重块5-6,另一端与伸入固定架5-3内部的连接杆5-9连接,条形孔5-10对保护杆5-1具有一定的限位作用,使保护杆5-1不易摆动,并且使保护杆5-1可上下移动,第一侧边升降保护器5和第一中间升降保护器4设置在顶棚3的上表面,保护杆5-1的底端通过顶棚3上设有的通孔穿过顶棚3并设有第一保护垫5-2,即第一保护垫5-2位于顶棚3的下方,通孔内设有电控阀3-1,每个电控阀3-1均与下方对应的一组第三红外传感器1-1通过控制器电性连接,每个保护杆5-1上均设有上限位环5-8和下限位环5-7,电控阀3-1打开关闭一次为,下限位环5-7通过通孔,保护杆5-1向下移动至第一保护垫5-2至与横杠1水平的位置,此时因电控阀3-1处于闭合状态,上限位环5-8卡设在电控阀3-1处的通孔内,当需要上升保护杆5-1时,第一电机9和电控阀3-1同时打开,至下限位环5-7穿过通孔,关闭电机和电控阀3-1,即可。
第一侧边升降保护器5的第一保护垫5-2均朝向横杠1的方向倾斜设置,第一中间升降保护器4的第一保护垫5-2为两边朝向两个横杠1倾斜的梯形结构,其每个第一保护垫5-2上均设有与总控制器电性连接并用于升起第一保护垫5-2的紧急开关12,每个第一保护垫5-2的底部均敞口设置,如图9所示,敞口处设有第一腿部限位器,第一腿部限位器包括缓冲板10和缓冲杆11,缓冲板10的两侧通过第一弹簧10-1与第一保护垫5-2内壁连接,缓冲板10的底部开有多个供腿部进入的卡槽10-2,本实施例中,相邻的两对卡槽10-2之间距离相同,该距离一般为人体两脚之间的距离,缓冲板10套设在缓冲杆11上,缓冲杆11的滑动配合在第一保护垫5-2的内壁上,缓冲杆11上套设有第二弹簧11-1,且缓冲杆11位于第二弹簧11-1和缓冲板10之间的杆体上设有推块11-2,并且因第一保护垫5-2是伴随保护杆5-1直上直下的运动,学生在双杠上的腿部对应卡槽10-2可能会存在一定的误差,因此每相邻的卡槽10-2之间以及位于缓冲板10两侧的卡槽10-2和缓冲板10内壁之间设置有导向轮10-3,保护杆5-1的底端滑动设置在第一保护垫5-2顶壁的第一滑槽5-11内,缓冲杆11的顶端滑动设置在第一保护垫5-2内壁的第一滑槽5-11内,在腿部逐渐进入卡槽10-2的过程中可通过导向轮10-3调整第一保护垫5-2水平方向的位置,使与卡槽10-2存在偏差的腿部得以进入卡槽10-2,值得注意的是,横杠1上的第三红外传感器1-1一组为一个区域,其区域在横杠1长度方向的长度与该第一腿部限位器一致,并且因可能存在学生的腿部刚好分别处在横杠1上相邻的两个区域,即触发了两组第三红外传感器1-1的情况,则每个相邻的腿部限位器最边上的卡槽10-2之间距离也是相同的,满足人类双腿之间的距离,并且第一保护垫5-2的两侧设有一个较大的导向轮10-3,从而进一步提高精度,当有腿部处在较大导向轮10-3位置时,可通过较大的导向轮10-3引导入卡槽10-2处的导向轮10-3,最终使腿部进入卡槽10-2中固定。
当满足上述有学生站立在横杠1上的条件时,总控制器控制对应第三红外传感器1-1位置的两个电控阀3-1开启,即站立在横杠1上的这种情况需要同时降下两个第一保护垫5-2,电控阀3-1开启后,保护杆5-1上的下限位环5-7得以通过通孔,保护杆5-1向下移动至第一保护垫5-2位于横杠1的水平位置后电控阀3-1闭合,此时上限位环5-8卡设在通孔内,保护杆5-1固定,两个第一保护垫5-2分别位于站立学生的两侧,站立学生可手扶着保护杆5-1,第一保护垫5-2防止学生向两侧跌落下横杠1,值得注意的是,站立在横杠1上的学生也可通过开启第一保护垫5-2上的紧急开关12,总控制器接收到信号控制第一保护垫5-2升起,学生自己从横杠1上下来,或者站立在横杠1上的学生手扶保护杆5-1,踩着第一保护垫5-2上表面从横杠1上下来。之后总控制器接收到输出信号变化,即学生站立在横杠1上的条件变化为不满足,总控制器控制电机和电控阀3-1同时开启,保护杆5-1向上移动,恢复至初始位置,第一电机9和电控阀3-1关闭,
当满足上述有学生倒挂在横杠1上的条件时,总控制器根据三种条件判断出学生脸部的朝向,例如,学生脸部朝向横杠1的外侧,则总控制器控制对应的第一中间升降保护器4落下,第一保护垫5-2降直横杠1的水平位置时,第一保护垫5-2上的第一腿部限位器伴随第一保护垫5-2向下移动逐步使卡槽10-2进入倒挂学生的腿部,卡设在腿部上方,保证学生不会从横杠1上掉落,学生后续可通过水平方向抽离自己的腿部离开双杠,之后总控制器监测到条件变化为不满足时,总控制器控制电机和电控阀3-1同时开启,保护杆5-1向上移动,恢复至初始位置。
值得注意的是,上述保护装置停止启动的情况为,保护装置在启动过程中,满足停止启动的条件,当保护装置启动完成后,除非条件变化,保护装置则一直保持启动状态。
实施例2
本实施例是又一种保护装置的实施方式,一个保护装置可同时满足站立在横杠1上或倒挂在横杠1上两种情况的站立需求。
如图10至12所示,所述保护装置包括多个设在地面并沿横杠1长度方向排列的第二中间升降保护器13和第二侧边升降保护器14,第二中间升降保护器13对应两个横杠1中间的位置,第二侧边保护器分别对应两个横杠1外侧的位置,第二中间升降保护器13和第二侧边升降保护器14均与横杠1上位置相对应的第三红外传感器1-1通过总控制器电性连接,地面的缓冲垫6上开有多个通孔,每个第二中间升降保护器13和第二侧边升降保护器14均包括预埋在地面以下的齿条杆14-1和设在缓冲垫6通孔内的第二保护垫14-3,齿条杆14-1的顶端与第二保护垫14-3连接,齿条杆14-1上啮合有齿轮14-2,齿轮14-2套设在第二电机15传动轴上,其中第二保护垫14-3与缓冲垫6表面平齐,在正常情况下不影响缓冲垫6的使用,为了提高保护效果,所述第二侧边升降保护器14的第二保护垫14-3均朝向横杠1的方向倾斜设置,第二中间升降保护器13的第二保护垫14-3为两边朝向两个横杠1倾斜的梯形结构,实际使用时,由于第二保护垫14-3和缓冲垫6均为柔性材质,缓冲垫6上的通孔,无需开的过大,即使为了流畅性,将通孔开大,也可在通孔处设置电控阀3-1,在第二保护垫14-3需要移动时,总控制器控制电控阀3-1开启闭合即可,在电控阀3-1闭合,第二保护垫14-3处在缓冲垫6内时,不影响缓冲垫6的正常使用,每个第二保护垫14-3上均设有与总控制器电性连接的紧急开关12,每个第二保护垫14-3的倾斜面上开有多个均匀间隔分布的凹槽14-4,另外的第二保护垫14-3也可以设置为方形或长方形结构,无需设置倾斜面也可,另外的第二保护垫14-3也可以设置为方形或长方形结构,无需设置倾斜面也可,此时的凹槽14-4设置在第二保护垫14-3的上表面,每个凹槽14-4内均设有用于固定腿部的第二腿部限位器。
如13图和14所示,第二腿部限位器包括多个弧形的橡胶垫14-5和连接在橡胶垫14-5内侧的伸缩杆14-8,多个橡胶垫14-5相互拼接组成供腿部进入的容腔14-7,位于凹槽14-4顶部两侧的橡胶垫14-5上铰接有可扣合在容腔14-7顶部的限位板14-6,限位板14-6的铰接点上套设有扭簧,第二保护垫14-3上位于每个限位板14-6的上方均设有限位座14-9,限位座14-9可对限位板14-6限位,防止限位板14-6向上翻转,凹槽14-4的底部连通有缓冲槽14-11,位于凹槽14-4底部的橡胶垫14-5可通过其上的伸缩杆14-8进出缓冲槽14-11,所述限位座14-9的表面设有朝向容腔14-7倾斜的导向面,导向面上朝向容腔14-7的方向排列分布有多个滚轴14-10,齿条杆14-1的顶端滑动设置在第二保护垫14-3底壁的第二滑槽14-12内,当腿部与容腔14-7的位置出现偏差时,可通过限位座14-9纠正,同样的相邻两个容腔14-7之间的距离一般为人双腿之间的距离,并且两个相邻的第二保护垫14-3上最侧边相对的两个容腔14-7之间的距离与相邻两个容腔14-7之间的距离相同,伸缩杆14-8由外杆和内杆组成,内杆通过第三弹簧固定在外杆中,且位于凹槽14-4底部的橡胶垫14-5上的伸缩杆14-8,其外杆固定在缓冲槽14-11的槽壁上,在每个第二保护垫14-3内可设置压力传感器6-1,避免有人人踩住第二保护垫14-3时,第二保护垫14-3向上移动。
当满足上述有学生站立在横杠1上的条件时,总控制器控制相应位置的电机转动,电机带动齿轮14-2转动,进而齿条杆14-1向上移动,第二保护垫14-3从缓冲垫6内向上升起至横杠1两侧,利用电机的自锁功能将第二保护垫14-3固定,以保护学生,同样的,按下第二保护垫14-3上的紧急开关12可控制第二保护垫14-3向下移动回缓冲垫6内,也可通过踩着第二保护垫14-3的上表面离开横杠1,之后总控制器监测到条件变化为不满足,总控制控制电机,使第二保护垫14-3下降回缓冲垫6内。
当满足上述有学生倒挂在横杠1上的条件时,总控制器根据三种条件判断出学生脸部的朝向,例如,学生脸部朝向横杠1内侧的情况,则总控制器控制一个第二侧边升降保护器14升起,第二保护垫14-3升起至横杠1的水平位置的过程中,第二保护垫14-3上的第二腿部限位器伴随第二保护垫14-3向上移动逐步使学生的腿部推动限位板14-6转动,并依次进入容腔14-7和缓冲槽14-11,值得注意的是,本实施例中因倒挂在横杠1上的条件启动第二保护垫14-3升起至指定位置后,总控制器需控制第二电机15回转一下,即第二保护垫14-3向下移动一小段距离后再固定,使进入缓冲槽14-11中的腿部回至容腔14-7,以使腿部进入缓冲槽14-11时,限位板14-6在扭簧的作用下顺利复位,最终阻挡在容腔14-7即腿部的上方,避免学生在倒挂时翻到跌落双杠,学生在离开时,如图14所示,可沿容腔14-7的前后方向抽离腿部。之后总控制器监测到条件变化为不满足条件,控制第二电机15,使第二保护垫14-3下降回缓冲垫6内。
值得注意的是,上述保护装置停止启动的情况为,保护装置在启动过程中,满足停止启动的条件,当保护装置启动完成后,除非条件变化,保护装置则一直保持启动状态。
对所公开的实施例的上述说明,使本领域专业技术学生员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术学生员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种安全型双杠及危险动作识别方法
- 一种基于动作行为特征的危险驾驶行为识别方法及系统