电子设备
文献发布时间:2023-06-19 11:35:49
相关申请的相互参照
本申请主张2018年11月19日在日本提出的日本特愿2018-216644号的优先权,并将该在先申请的公开内容全部引入本申请用于参照。
技术领域
本发明涉及电子设备。
背景技术
以往,已知一种在佩戴于被检者的手腕的状态下获取被检者的生物体信息的电子设备(例如,参照专利文献1和专利文献2)。另外,公开了一种容易稳定地推定被检者的颈动脉的状态的电子设备(例如,专利文献3)。
现有技术文献
专利文献
专利文献1:国际公开第2016/174839号
专利文献2:国际公开第2016/194308号
专利文献3:日本特开2018-460号公报
发明内容
一个方式的电子设备包括传感器、通知部以及控制部。所述传感器向被检者的被检部位侧被施力,能够检测该被检部位中的脉动。所述通知部通知与所述传感器在所述被检部位的位置相关的信息。所述控制部基于由所述传感器检测的所述被检部位中的脉动,进行控制以使所述通知部通知与所述传感器在所述被检部位的位置相关的信息。
附图说明
图1是第一实施方式的电子设备的概略的外观立体图。
图2是表示佩戴了图1的电子设备的状态的概略图。
图3是表示从正面观察时图1的电子设备的外装部以及传感器部的概略图。
图4是示意性地表示从正面观察时被检者的手腕与传感器部的第一臂部之间的位置关系的概略图。
图5A是示意性地表示从正面观察时被检者的手腕、传感器部的第一臂部、以及测定部的外装部之间的位置关系的概略图。
图5B是示意性地表示从正面观察时被检者的手腕、传感器部的第一臂部、以及测定部的外装部之间的位置关系的概略图。
图6是表示图1的电子设备的概略结构的功能框图。
图7是表示由传感器部获取的脉搏波的一例的图。
图8是表示计算出的AI的时间变动的图。
图9是表示计算出的AI和血糖值的测定结果的图。
图10是表示计算出的AI与血糖值的关系的图。
图11是表示计算出的AI和中性脂肪值的测定结果的图。
图12是表示推定血液的流动性以及糖代谢和脂质代谢的状态的过程的流程图。
图13是表示第一实施方式的系统的概略结构的示意图。
图14是示意性地表示从正面观察时被检者的手腕、传感器部的第一臂部、以及测定部的外装部之间的位置关系的变形例的概略图。
图15是示意性地表示从正面观察时被检者的手腕与传感器部的第一臂部之间的位置关系的概略图。
图16是表示从正面观察时第二实施方式的电子设备的外装部以及传感器部的概略图。
图17是部分表示佩戴了图16的电子设备的状态的概略图。
图18是表示由传感器部获取的脉搏波的一例的图。
图19A是表示由传感器部获取的脉搏波的一例的图。
图19B是表示由传感器部获取的脉搏波的一例的图。
图19C是表示由传感器部获取的脉搏波的一例的图。
图20A是表示由传感器部获取的脉搏波的一例的图。
图20B是表示由传感器部获取的脉搏波的一例的图。
图20C是表示由传感器部获取的脉搏波的一例的图。
图21A是表示由传感器部获取的脉搏波的一例的图。
图21B是表示由传感器部获取的脉搏波的一例的图。
图22A是表示由传感器部获取的脉搏波的一例的图。
图22B是表示由传感器部获取的脉搏波的一例的图。
图23是第二实施方式的变形例的电子设备的概略的外观立体图。
图24是第二实施方式的变形例的电子设备的概略的外观立体图。
图25是表示被检者使用第二实施方式的变形例的电子设备测定生物体信息的情形的概略图。
图26是表示第二实施方式的变形例的电子设备未使用时的状态的概略的外观立体图。
图27是表示第二实施方式的变形例的电子设备的传感器部和主体部的概略图。
图28是第二实施方式的其他变形例的电子设备的概略的外观立体图。
图29是表示被检者使用第二实施方式的又一其他变形例的电子设备测定生物体信息的情形的概略图。
图30是表示被检者使用第二实施方式的又一其他变形例的电子设备测定生物体信息的情形的概略图。
图31是表示第三实施方式的电子设备的使用方式的图。
图32是放大表示图31所示的传感器的图。
图33是从不同的方向观察图32的剖视图。
图34A是说明第三实施方式的电子设备的测定原理的图。
图34B是说明第三实施方式的电子设备的测定原理的图。
图35A是说明第三实施方式的电子设备的测定原理的图。
图35B是说明第三实施方式的电子设备的测定原理的图。
图36A是说明第三实施方式的电子设备的测定原理的图。
图36B是说明第三实施方式的电子设备的测定原理的图。
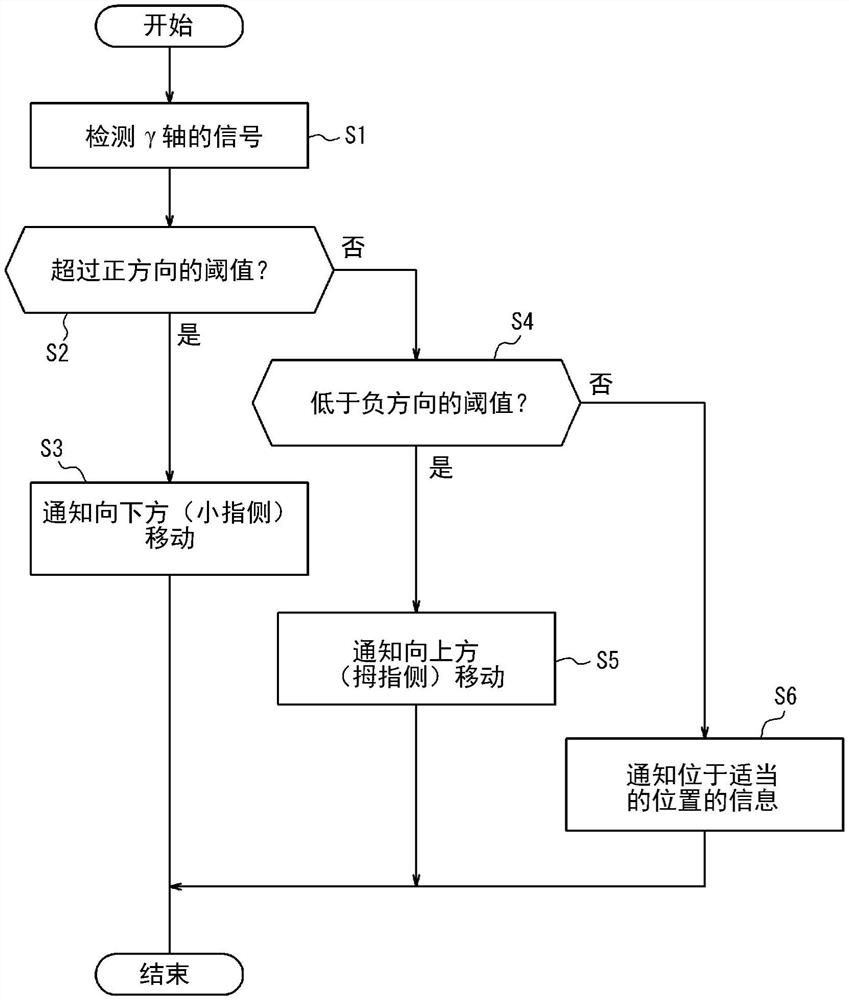
图37是表示第三实施方式的电子设备的动作的过程的流程图。
具体实施方式
(第一实施方式)
根据电子设备的佩戴状态,存在难以准确地获取生物体信息的情况。如果电子设备构成为更容易准确地获取生物体信息,则对于被检者而言,其有用性有所提高。本发明的目的在于提供一种能够提高有用性的电子设备。根据本发明,能够提供一种能够提高有用性的电子设备。以下,参照附图对第一实施方式进行详细说明。
图1是第一实施方式的电子设备100的概略的外观立体图。电子设备100包括:佩戴部110、基部111、安装于基部111的固定部112、以及测定部120。
在本实施方式中,基部111构成为大致长方形的平板形状。在本说明书中,如图1所示,以下将平板形状的基部111的短边方向设为x轴方向、将平板形状的基部111的长边方向设为y轴方向、将平板形状的基部111的正交方向设为z轴方向进行说明。另外,电子设备100的一部分如在本说明书中说明的那样构成为可动,但在本说明书中说明与电子设备100相关的方向的情况下,只要没有特别提及,就表示图1所示的状态下的x、y以及z轴方向。另外,在本说明书中,将z轴正方向称为上,将z轴负方向称为下,将x轴正方向称为电子设备100的正面。
在被检者使用佩戴部110佩戴了电子设备100的状态下,电子设备100测定被检者的生物体信息。由电子设备100测定的生物体信息是能够由测定部120测定的被检者的脉搏波。在本实施方式中,以下,以将电子设备100佩戴于被检者的手腕而获取脉搏波为一例进行说明。
图2是表示被检者佩戴着图1的电子设备100的状态的概略图。被检者使手腕穿过由佩戴部110、基部111、测定部120形成的空间,由佩戴部110来固定手腕,从而如图2所示那样能够佩戴电子设备100。在图1和图2所示的例子中,被检者沿着x轴方向朝向x轴正方向,使手腕穿过由佩戴部110、基部111、测定部120形成的空间,从而佩戴电子设备100。被检者例如以后述的测定部120的触脉部132与尺动脉或桡动脉所在的位置接触的方式佩戴电子设备100。电子设备100在被检者的手腕上测定在尺动脉或者桡动脉中流动的血液的脉搏波。
测定部120具有:主体部121、外装部122、以及传感器部130。传感器部130安装于主体部121。测定部120经由结合部123安装于基部111。
结合部123可以以相对于基部111能够沿着基部111的表面旋转的方式安装于基部111。即,在图1所示的例子中,如箭头A所示,结合部123可以以相对于基部111能够在xy平面上旋转的方式安装于基部111。在该情况下,经由结合部123安装于基部111的测定部120的整体相对于基部111能够在xy平面上旋转。
外装部122在穿过结合部123的轴S1上与结合部123连结。轴S1是沿x轴方向延伸的轴。通过这样的方式将外装部122与结合部123连结,外装部122相对于结合部123,能够沿着与基部111所延伸的xy平面交叉的平面位移。即,外装部122能够以轴S1为中心相对于基部111所延伸的xy平面倾斜规定的角度。例如,外装部122能够在载置于yz平面等相对于xy平面具有规定的倾斜度的面上的状态下进行位移。在本实施方式中,如图1的箭头B所示,外装部122能够以轴S1为中心,以能够在与xy平面正交的yz平面上旋转的方式与结合部123连结。
外装部122具有接触面122a,该接触面122a在电子设备100处于佩戴状态下与被检者的手腕接触。外装部122可以在接触面122a侧具有开口部125。外装部122可以构成为覆盖主体部121的至少一部分。
外装部122在其内侧的空间内可以具有沿z轴方向延伸的轴部124。主体部121具有用于使轴部124穿过的孔,在轴部124穿过该孔的状态下,主体部121安装于外装部122的内侧的空间。即,如图1的箭头C所示,主体部121相对于外装部122,以能够以轴部124为中心在xy平面上旋转的方式安装于外装部122。也就是说,主体部121相对于外装部122,以能够沿着作为基部111的表面的xy平面旋转的方式安装于外装部122。另外,如图1的箭头D所示,主体部121以能够沿着轴部124即沿着z轴方向相对于外装部122在上下方向上位移的方式安装于外装部122。
传感器部130安装于主体部121。这里,参照图3,对传感器部130进行详细说明。图3是表示从正面观察时电子设备100的外装部122以及传感器部130的概略图。在图3中,用虚线表示传感器部130中的从正面观察时与外装部122重叠的部分。
传感器部130具有第一臂部134以及第二臂部135。第二臂部135固定于主体部121。第二臂部135的下侧的一端135a与第一臂部134的一端134a连接。如图3的箭头E所示,第一臂部134以一端134a为轴,另一端134b侧能够在yz平面上旋转的方式与第二臂部135连接。
第一臂部134的另一端134b侧经由弹性体140与第二臂部135的上侧的另一端135b侧连接。在弹性体140未被按压的状态下,在第一臂部134的另一端134b从外装部122的开口部125向接触面122a侧突出的状态下,第一臂部134被第二臂部135支撑。弹性体140例如为弹簧。但是,弹性体140并不限定于弹簧,也可以是其他任意的弹性体,例如树脂或海绵等。
在第一臂部134的另一端134b结合有触脉部132。触脉部132是在电子设备100处于佩戴状态下与作为被检者的血液的脉搏波的测定对象的被检部位接触的部分。在本实施方式中,触脉部132例如与尺动脉或者桡动脉所在的位置接触。触脉部132可以由难以吸收由被检者的脉搏引起的身体表面的变化的材料构成。触脉部132可以由被检者在接触状态下不易感到疼痛的材料构成。例如,触脉部132可以由在内部填充有珠子的布制的袋等构成。触脉部132例如可以构成为相对于第一臂部134能够装卸。例如,被检者可以匹配自身的手腕的大小和/或形状而将多个大小和/或形状的触脉部132中的一个触脉部132佩戴于第一臂部134。由此,被检者能够使用与自身手腕的大小和/或形状匹配的触脉部132。
传感器部130具有检测第一臂部134的位移的角速度传感器131。角速度传感器131只要检测出第一臂部134的角度位移即可。传感器部130所具有的传感器并不限定于角速度传感器131,例如也可以是加速度传感器、角度传感器、其他运动传感器,也可以包括这些多个传感器。
如图2所示,在本实施方式中,在电子设备100处于佩戴状态下,触脉部132与被检者的右手的拇指侧的动脉即桡动脉上的皮肤接触。由于配置在第二臂部135与第一臂部134之间的弹性体140的弹力,配置于第一臂部134的另一端134b侧的触脉部132与被检者的桡动脉上的皮肤接触。第一臂部134根据被检者的桡动脉的移动即脉动而位移。角速度传感器131通过检测第一臂部134的位移来获取脉搏波。脉搏波是指,从身体表面捕捉到的因血液的流入而产生的血管的容积时间变化的波形。
如图3所示,在弹性体140未被按压的状态下,第一臂部134为另一端134b从开口部125突出的状态。当将电子设备100佩戴至被检者时,使与第一臂部134结合的触脉部132与被检者的桡动脉上的皮肤接触。弹性体140根据脉动而伸缩,触脉部132发生位移。使用具有适度的弹性率的弹性体,以使弹性体140不妨碍脉动且根据脉动而伸缩。图1所示的开口部125的开口宽度W具有充分大于血管直径即在本实施方式中的桡动脉直径的宽度。通过在外装部122设置开口部125,在电子设备100处于佩戴状态下,外装部122的接触面122a不压迫桡动脉。因此,电子设备100能够获取噪声小的脉搏波,从而能够提高测定的精度。
如图1所示,固定部112固定于基部111。固定部112可以具有用于固定佩戴部110的固定机构。固定部112可以在其内部具有电子设备100用于测定脉搏波的各种功能部。例如,固定部112可以具有后述的控制部、电源部、存储部、通信部、通知部、以及使这些功能部动作的电路和连接它们的线缆等。
佩戴部110是用于使被检者将手腕固定于电子设备100的机构。在图1所示的例子中,佩戴部110是细长的带状的带。在图1所示的例子中,佩戴部110配置为,一端110a与测定部120的上端结合,另一端110b穿过基部111的内部而位于y轴正方向侧。被检者例如将右手腕穿过由佩戴部110、基部111、测定部120形成的空间,一边以触脉部132与右手腕的桡动脉上的皮肤接触的方式进行调整,一边用左手将佩戴部110的另一端110b向y轴正方向拉动。被检者以将右手腕固定于电子设备100的程度拉动另一端110b,在该状态下通过固定部112的固定机构固定佩戴部110。通过这样的方式,被检者能够用单手(在本实施方式中为左手)佩戴电子设备100。另外,通过使用佩戴部110将手腕固定于电子设备100,能够使电子设备100的佩戴状态稳定。由此,在测定中手腕与电子设备100的位置关系不易变化,因此,能够稳定地测定脉搏波,从而能够测定的精度提高。
接下来,对在佩戴电子设备100时的电子设备100的可动部的移动进行说明。
如上所述,被检者在佩戴电子设备100时,使手腕沿着x轴方向穿过由佩戴部110、基部111、测定部120形成的空间。此时,测定部120构成为相对于基部111能够沿着图1的箭头A的方向旋转。因此,被检者能够使测定部120向图1的箭头A所示的方向旋转而使手腕穿过。这样,通过构成为测定部120能够旋转,从而被检者能够根据自身与电子设备100的位置关系,一边适当改变测定部120的方向一边使手腕穿过。这样,根据电子设备100,被检者容易佩戴电子设备100。
被检者在将手腕穿过由佩戴部110、基部111、测定部120形成的空间之后,使触脉部132与手腕的桡动脉上的皮肤接触。这里,由于主体部121构成为能够向图1的箭头D的方向位移,因此,如图4所示,与主体部121结合的传感器部130的第一臂部134也能够向作为z轴方向的箭头D的方向位移。因此,被检者能够根据自身的手腕的大小和粗细等使第一臂部134向箭头D的方向位移,以使触脉部132与桡动脉上的皮肤接触。被检者能够将主体部121固定在位移后的位置。通过这样的方式,根据电子设备100,容易将传感器部130的位置调整为适于测定的位置。因此,根据电子设备100,能够提高测定的精度。此外,在图1所示的例子中,对主体部121能够沿着z轴方向位移进行了说明,但主体部121也可以未必构成为能够沿着z轴方向位移。主体部121只要构成为例如能够根据手腕的大小和粗细等而调整位置即可。例如,主体部121也可以构成为能够沿着与作为基部111的表面的xy平面交叉的方向发生位移。
这里,当触脉部132在桡动脉上的皮肤上沿与皮肤表面正交的方向接触时,传递至第一臂部134的脉动变大。即,触脉部132的位移方向(图3的箭头E所示的方向)是与皮肤表面正交的方向的情况下,传递到第一臂部134的脉动变大,从而能够提高脉动的获取精度。在本实施方式的电子设备100中,如图1的箭头C所示,主体部121以及与主体部121结合的传感器部130构成为能够相对于外装部122以轴部124为中心旋转。由此,被检者能够调整传感器部130的方向,以使触脉部132的位移方向成为与皮肤表面正交的方向。即,电子设备100能够调整传感器部130的方向以使触脉部132的位移方向成为与皮肤表面正交的方向。通过这样的方式,根据电子设备100,能够根据被检者的手腕的形状来调整传感器部130的方向。由此,被检者的脉动的变化更容易传递到第一臂部134。因此,根据电子设备100,能够提高测定的精度。
如图5A所示,被检者使触脉部132与手腕桡动脉上的皮肤接触,然后将佩戴部110的另一端110b拉起,以将手腕固定于电子设备100。这里,由于外装部122构成为能够沿着图1的箭头B的方向旋转,所以当被检者拉动佩戴部110时,外装部122以轴S1为中心旋转,外装部122的上端侧向y轴负方向位移。即,如图5B所示,外装部122的上端侧向y轴负方向位移。由于第一臂部134经由弹性体140与第二臂部135连接,因此,外装部122的上端侧向y轴负方向位移,从而触脉部132通过弹性体140的弹力向桡动脉侧被施力。由此,触脉部132更可靠地容易捕捉脉动的变化。因此,根据电子设备100,能够提高测定的精度。
外装部122的旋转方向(如箭头B所示的方向)与第一臂部134的旋转方向(如箭头E所示的方向)可以大致平行。外装部122的旋转方向与第一臂部134的旋转方向越接近于平行,在使外装部122的上端侧向y轴负方向位移时,弹性体140的弹力越有效地作用于第一臂部134。此外,外装部122的旋转方向与第一臂部134的旋转方向大致平行的范围,包括在外装部122的上端侧向y轴负方向位移时弹性体140的弹力能够施加于第一臂部134的范围。
这里,图5A和图5B所示的外装部122的正面侧的面122b为在上下方向上长的大致长方形。面122b在y轴负方向侧的边上的上端侧具有切口122c。通过切口122c,如图5B所示,即使外装部122的上端侧向y轴负方向位移,面122b也不易与桡动脉上的皮肤接触。因此,容易防止桡动脉的脉动因与面122b接触而受阻。
此外,如图5B所示,当外装部122的上端侧向y轴负方向位移时,切口122c的下方侧的端部122d在与手腕的桡动脉不同的位置处接触。当端部122d与手腕接触时,外装部122向y轴负方向不会位移到该接触位置以上。因此,通过端部122d,能够防止外装部122位移到规定位置以上。假设外装部122向y轴负方向位移到规定位置以上,则由于弹性体140的弹力,第一臂部134将强力地施力于桡动脉侧。由此,容易妨碍桡动脉的脉动。在本实施方式的电子设备100中,通过外装部122具有端部122d,能够防止从第一臂部134对桡动脉施加过度的压力,其结果,不易妨碍桡动脉的脉动。这样,端部122d作为限制外装部122的可位移的范围的阻挡件发挥功能。
在本实施方式中,如图5A和图5B所示,第一臂部134的旋转轴S2可以配置在与面122b的y轴负方向侧的端部分离的位置。当旋转轴S2配置在面122b的y轴负方向侧的端部的附近时,由于第一臂部134与被检者的手腕接触,因此,有时可能无法准确地捕捉到桡动脉的脉动引起的变化。通过将旋转轴S2配置在与面122b的y轴负方向侧的端部分离的位置,能够降低第一臂部134与手腕接触的可能性。由此,第一臂部134更容易准确地捕捉脉动的变化。
被检者拉动佩戴部110的另一端110b,在该状态下通过固定部112的固定机构将佩戴部110固定,从而将电子设备100佩戴于手腕。在以这种方式佩戴于手腕的状态下,电子设备100通过第一臂部134随着脉动的变化而向沿着箭头E所示的方向变化,来测定被检者的脉搏波。
图6是表示电子设备100的概略结构的功能框图。电子设备100包括:传感器部130、控制部143、电源部144、存储部145、通信部146、以及通知部147。在本实施方式中,控制部143、电源部144、存储部145、通信部146、以及通知部147例如包含在固定部112的内部。
传感器部130包括角速度传感器131,从被检部位检测脉动而获取脉搏波。
控制部143是对包含电子设备100的各功能块在内的电子设备100的整体进行控制和管理的处理器。另外,控制部143是根据所获取的脉搏波来计算基于脉搏波的传播现象的指标的处理器。控制部143由CPU(Central Processing Unit:中央处理单元)等处理器构成,该CPU执行规定了控制步骤的程序以及计算基于脉搏波的传播现象的指标的程序,该程序被存储于例如存储部145等的存储介质中。另外,控制部143基于计算出的指标,推定与被检者的糖代谢或脂质代谢等相关的状态。控制部143向通知部147通知数据。
电源部144例如具有锂离子电池及其充电和放电用的控制电路等,向电子设备100整体供给电力。
存储部145存储程序和数据。存储部145可以包括半导体存储介质以及磁存储介质等任意的非暂时性(non-transitory)的存储介质。存储部145可以包括多种类的存储介质。存储部145可以包括存储卡、光盘、或光磁盘等的可移动的存储介质与存储介质的读取装置的组合。存储部145可以包括用作RAM(Random Access Memory:随机存取存储器)等的暂时性的存储区域的存储设备。存储部145存储各种信息和/或用于使电子设备100动作的程序等,并且还作为工作存储器发挥功能。存储部145例如也可以存储由传感器部130获取的脉搏波的测定结果。
通信部146通过与外部装置进行有线通信或无线通信,进行各种数据的收发。通信部146例如与为了管理健康状态而存储被检者的生物体信息的外部装置进行通信,将电子设备100所测定的脉搏波的测定结果和/或电子设备100所推定的健康状态向该外部装置发送。
通知部147通过声音、振动、以及图像等来通知信息。通知部147可以具有扬声器、振子、以及液晶显示器(LCD:Liquid Crystal Display)、有机EL显示器(OELD:OrganicElectro-Luminescence Display)、或无机EL显示器(IELD:Inorganic Electro-Luminescence Display)等的显示设备。在本实施方式中,通知部147通知例如被检者的糖代谢或脂质代谢的状态的状态。
图7是表示使用电子设备100在手腕上获取的脉搏波的一例的图。图7是将角速度传感器131用作脉动的检测单元的情况下的图。图7是对由角速度传感器131获取的角速度进行时间积分的图,横轴表示时间且纵轴表示角度。所获取的脉搏波有时会包括例如被检者的身体移动所引起的噪声,因此也可以进行利用去除DC(Direct Current:直流电)分量的过滤器的校正,仅提取脉动分量。
利用图7说明根据所获取的脉搏波来计算基于脉搏波的指标的方法。脉搏波的传播是由从心脏推出的血液引起的搏动在动脉的壁和/或血液中传播的现象。从心脏推出的血液引起的搏动作为前进波到达手脚的末梢,其中一部分被血管的分支部、血管内径的变化部等反射而作为反射波返回。基于脉搏波的指标例如有:前进波的脉搏波传播速度PWV(Pulse Wave Velocity)、脉搏波的反射波的大小PR、脉搏波的前进波与反射波的时间差Δt、以脉搏波的前进波与反射波的大小之比所表示的AI(Augmentation Index,增强指数)等。
图7所示的脉搏波是用户的n次的脉搏,n是1以上的整数。脉搏波是由来自心脏的血液的驱出而产生的前进波与从血管分支和/或血管内径的变化部产生的反射波重叠而成的合成波。在图7中,用P
基于脉搏波的指标是对从脉搏波得到的信息进行定量化的指标。例如,作为基于脉搏波的指标之一的PWV是基于在上臂与脚踝等两点的被检部位测定的脉搏波的传播时间差与两点间的距离而计算出的。具体而言,PWV是同步获取动脉在两点处的脉搏波(例如上臂和脚踝),并将两点的距离差(L)除以两点的脉搏波的时间差(PTT)而计算出的。例如,作为基于脉搏波的指标之一的反射波的大小P
脉搏波传播速度PWV、反射波的大小P
在本实施方式中,作为基于脉搏波的指标的一例,已经示出了电子设备100计算出脉搏波传播速度PWV、反射波的大小P
图8是表示计算出的AI的时间变动的图。在本实施方式中,使用具有角速度传感器131的电子设备100在约五秒钟内获取脉搏波。控制部143根据所获取的脉搏波计算出每个脉搏的AI,进而计算出它们的平均值AI
电子设备100在饭前、刚吃完饭后、以及饭后每30分钟获取脉搏波,基于各自的脉搏波而计算出多个AI。根据饭前所获取的脉搏波而计算出的AI约为0.8。与饭前相比,刚吃完饭后的AI变小,在饭后约1小时AI变为最小的极值。直到饭后3小时结束测定为止,AI逐渐地变大。
电子设备100能够根据计算出的AI的变化来推定出血液的流动性的变化。例如血液中的红血球、白血球、血小板聚集成团状或者粘合力变大时,血液的流动性变低。例如,若血液中的血浆的含水率变小,则血液的流动性变低。这些血液的流动性的变化例如基于后述的糖脂质状态和/或中暑、脱水、低体温等被检者的健康状态而变化。在被检者的健康状态变得严重之前,被检者使用本实施方式的电子设备100,能够获知自身的血液的流动性的变化。从图8所示的饭前饭后的AI的变化,能够推定出饭后血液的流动性变低,在饭后约1小时血液的流动性最低,之后血液的流动性逐渐地变高。电子设备100也可以将血液的流动性低的状态表述为“粘稠”,将血液的流动性高的状态表述为“通畅”来进行通知。例如,电子设备100也可以以被检者的实际年龄的AI的平均值为基准进行“粘稠”、“通畅”的判定。电子设备100可以在计算出的AI大于平均值时判定为“通畅”,在计算出的AI小于平均值时判定为“粘稠”。电子设备100也可以例如以饭前的AI为基准进行“粘稠”、“通畅”的判定。电子设备100也可以将饭后的AI与饭前的AI进行比较来推定“粘稠”的程度。电子设备100例如能够将饭前的AI即空腹时的AI用作被检者的血管年龄(血管的硬度)的指标。如果电子设备100例如以被检者的饭前的AI即空腹时的AI为基准来计算所计算的AI的变化量,则能够减少被检者的血管年龄(血管的硬度)的推定误差,因此,能够更高精度地推定血液的流动性的变化。
图9是表示计算出的AI和血糖值的测定结果的图。脉搏波的获取方法以及AI的计算方法与图8所示的实施方式相同。图9的右纵轴表示血中的血糖值,左纵轴表示计算出的AI。图9的实线表示根据获取的脉搏波计算出的AI,虚线表示测定的血糖值。血糖值是在获取脉搏波之后立即测定的。血糖值使用泰尔茂(Terumo Corporation)制造的血糖测定器“美迪赛福斐特(Medisafe fit)”而测定。与饭前的血糖值相比,刚吃完饭后的血糖值上升约20mg/d1。在饭后约1小时血糖值变为最大的极值。之后,直到结束测定,血糖值逐渐变小,在饭后约3小时几乎与饭前的血糖值相同。
如图9所示,饭前饭后的血糖值与由脉搏波计算出的AI呈负相关。饭后血糖值上升,分泌胰岛素。胰岛素的分泌引起血管扩张,血糖值上升引起渗透压增加,从而血流量增加。其结果,血管扩张。血管扩张导致AI下降。另外,若血糖值升高,则由于血液中的糖而红血球和血小板聚集成团状或者粘合力变强,其结果,有时血液的流动性变低。若血液的流动性变低,则有时脉搏波传播速度PWV变小。若脉搏波传播速度PWV变小,则有时前进波与反射波的时间差Δt变大。若前进波与反射波的时间差Δt变大,则有时反射波的大小P
基于饭后最初检测到的AI的最小极值即AIP的发生时间,电子设备100能够推定被检者的糖代谢的状态。电子设备100推定例如血糖值作为糖代谢的状态。作为糖代谢的状态的推定例,例如在饭后最初检测到的AI的最小极值AI
基于作为饭前的AI的AI
图10是表示计算出的AI与血糖值的关系的图。计算出的AI和血糖值是在血糖值的变动较大的饭后1小时以内获取的值。图10的数据包括相同被检者的不同的多个饭后的数据。如图10所示,计算出的AI与血糖值呈负相关。计算出的AI与血糖值的相关系数为0.9以上,显示出非常高的相关。例如,若预先针对每个被检者获取图10所示的计算出的AI与血糖值的相关,则电子设备100也能够根据计算出的AI来推定被检者的血糖值.
图11是表示计算出的AI和中性脂肪值的测定结果的图。脉搏波的获取方法以及AI的算出方法与图8所示的实施方式相同。图11的右纵轴表示血中的中性脂肪值,左纵轴表示AI。图11的实线表示根据获取的脉搏波计算出的AI,虚线表示测定出的中性脂肪值。中性脂肪值在获取脉搏波之后立即测定。中性脂肪值是使用Technomedica公司(テクノメディ力社)制造的脂质测定装置“Pocket 1ipid(ポケツ卜リピツド)”进行测定的。与饭前的中性脂肪值相比,饭后的中性脂肪值的最大极值上升约30mg/d1。在饭后约2小时后中性脂肪变为最大的极值。之后,直到结束测定为止,中性脂肪值逐渐变小,在饭后约3.5小时变为几乎与饭前的中性脂肪值相同。
与此相对,计算出的AI的最小极值在饭后约30分钟检测到第一最小极值AI
基于在饭后规定时间以后检测到的第二最小极值AI
基于作为饭前的AI的AI
另外,根据图9至图11所示的测定结果,本实施方式的电子设备100能够基于饭后最早检测到的第一最小极值AI
在本实施方式中,作为脂质代谢的推定例而说明了中性脂肪的情况,但脂质代谢的推定并不限定于中性脂肪。电子设备100所推定的脂质值例如包括总胆固醇、好(HDL:High Density Lipoprotein,高密度脂蛋白)胆固醇,以及坏(LDL:Low DensityLipoprotein,低密度脂蛋白)胆固醇等。这些脂质值也呈现与上述的中性脂肪的情况相同的倾向。
图12是表示基于AI来推定血液的流动性以及糖代谢和脂质代谢的状态的过程的流程图。使用图12说明基于实施方式的电子设备100推定血液的流动性、以及糖代谢和脂质代谢的状态的流程。
如图12所示,电子设备100获取被检者的AI基准值作为初始设定(步骤S101)。AI基准值可以使用根据被检者的年龄所推定的平均AI,也可以使用事先获取的被检者的空腹时的AI。另外,电子设备100可以将在步骤S102~S108中判定为饭前的AI作为AI基准值,也可以将在即将测定脉搏波之前计算出的AI作为AI基准值。在该情况下,电子设备100在步骤S102~S108之后执行步骤S101。
接下来,电子设备100获取脉搏波(步骤S102)。例如电子设备100对于在规定的测定时间(例如5秒钟)获取的脉搏波,判定是否取得了规定的振幅以上。对于获取的脉搏波,若得到了规定的振幅以上,则进入步骤S103。若未得到规定的振幅以上,则重复步骤S102(这些步骤未图示)。在步骤S102中,例如电子设备100在检测到规定的振幅以上的脉搏波时,自动地获取脉搏波。
电子设备100根据在步骤S102获取的脉搏波,计算AI作为基于脉搏波的指标并存储于存储部145(步骤S103)。电子设备100也可以根据每规定的脉搏数(例如3拍)的AI
AI也可以例如通过脉搏数P
接下来,电子设备100将在步骤S101中获取的AI基准值与在步骤S103中计算出的AI进行比较,推定被检者的血液的流动性(步骤S104)。在计算出的AI大于AI基准值的情况下(“是”的情况下),推定为血液的流动性高,电子设备100例如通知血液的流动性高(步骤S105)。在计算出的AI小于等于AI基准值的情况下(“否”的情况下),推定为血液的流动性低,电子设备100例如通知血液的流动性低(步骤S106)。
接下来,电子设备100向被检者确认是否要推定糖代谢和脂质代谢的状态(步骤S107)。在步骤S107中不推定糖代谢和脂质代谢的情况下(“否”的情况下),电子设备100结束处理。在步骤S107中推定糖代谢和脂质代谢的情况下(“是”的情况下),电子设备100确认计算出的AI是在饭前还是在饭后获取的值(步骤S108)。在不是饭后(饭前)的情况下(“否”的情况下),返回步骤S102,获取下一个脉搏波。在饭后的情况下(“是”的情况下),电子设备100存储与计算出的AI对应的脉搏波的获取时间(步骤S109)。接下来,在获取脉搏波的情况下(步骤S110为“否”的情况下),返回步骤S102,获取下一个脉搏波。在结束脉搏波测定的情况下(步骤S110为“是”的情况)进入步骤S111以后,电子设备100推定被检者的糖代谢和脂质代谢的状态。
接下来,电子设备100从在步骤S104中计算出的多个AI中提取最小极值及其时间(步骤S111)。例如,在计算出如图11的实线所示的AI的情况下,电子设备100提取饭后约30分钟的第一最小极值AI
接下来,电子设备100根据第一最小极值AI
接下来,电子设备100通知步骤S112和步骤S113的推定结果(步骤S114),结束图12所示的处理。通知部147进行例如“糖代谢正常”、“疑似糖代谢异常”、“脂质代谢正常”、“疑似脂质代谢异常”等的通知。另外,通知部147也可以通知“请到病院就诊”、“请重新考虑饮食生活”等的建议。然后,电子设备100结束如图12所示的处理。
在本实施方式中,电子设备100能够根据基于脉搏波的指标来推定被检者的血液的流动性以及糖代谢和脂质代谢的状态。因此,电子设备100能够以非侵入的方式且在短时间内推定出被检者的血液的流动性以及糖代谢和脂质代谢的状态。
在本实施方式中,电子设备100根据基于脉搏波的指标的极值及其时间,能够进行糖代谢的状态的推定和脂质代谢的状态的推定。因此,电子设备100以非侵入的方式且在短时间内推定出被检者的糖代谢和脂质代谢的状态。
在本实施方式中,电子设备100例如能够以基于饭前(空腹时)的脉搏波的指标为基准,推定被检者的糖代谢和脂质代谢的状态。因此,在不考虑短期内不发生变化的血管内径和/或血管硬度等的情况下,能够准确地推定被检者的血液的流动性以及糖代谢和脂质代谢的状态。
在本实施方式中,电子设备100只要取得基于脉搏波的指标与血糖值、脂质值的校准,就能够以非侵入的方式且在短时间内推定被检者的血糖值、脂质值。
图13是表示第一实施方式的系统的概略结构的示意图。图13所示的系统构成为包括:电子设备100、服务器151、移动终端150、以及通信网络。如图13所示,由电子设备100计算出的基于脉搏波的指标通过通信网络向服务器151发送,并且作为被检者的个人信息存储于服务器151。在服务器151中,通过与被检者的过去的获取信息和/或各种数据库进行比较,推定被检者的血液的流动性以及糖代谢和脂质代谢的状态。服务器151进一步创建最适合被检者的建议。服务器151向被检者所持有的移动终端150回复推定结果以及建议。移动终端150能够构建从移动终端150的显示部通知接收到的推定结果以及建议的系统。通过利用电子设备100的通信功能,能够在服务器151收集来自多个利用者的信息,因此,推定的精度进一步提高。另外,由于将移动终端150用作通知单元,因此,电子设备100不需要通知部147,进一步实现小型化。另外,由于在服务器151进行被检者的血液的流动性以及糖代谢和脂质代谢的状态的推定,因此,能够减轻电子设备100的控制部143的运算负担。另外,由于能够将被检者的过去的获取信息保存于服务器151,因此,能够减轻电子设备100的存储部145的负担。因此,电子设备100能够进一步小型化、简化。另外,运算的处理速度也得到提高。
本实施方式的系统构成为经由服务器151利用通信网络连接电子设备100和移动终端150,但本发明的系统并不限定于此。也可以构成为不使用服务器151,而直接利用通信网络连接电子设备100和移动终端150。
为了完全且清楚地公开本发明,对特征性的实施例进行了记载。但是,附上的权利要求不应被限定于上述实施方式,应构成为实现在本说明书所示的基础事项的范围内本技术领域技术人员能够创造的所有变形例以及可代替的结构。
例如,在上述的实施方式中,对在传感器部130具有角速度传感器131的情况进行了说明,但电子设备100的方式并不限定于此。传感器部130可以具有包含发光部和受光部的光学脉搏波传感器,也可以具有压力传感器。另外,电子设备100的佩戴并不限于手腕。传感器部130配置于颈部、脚踝、大腿、耳朵等动脉上即可。
例如,在上述的实施方式中,根据基于脉搏波的指标的第一极值和第二极值以及它们的时间,推定出被检者的糖代谢和脂质代谢的状态,但电子设备100所执行的处理并不限定于此。有仅表示一个极值的情况,也有不表示极值的情况,电子设备100也可以根据基于计算出的脉搏波的指标的时间变动的整体倾向(例如积分值、傅立叶变换等)来推定被检者的糖代谢以及脂质代谢的状态。另外,电子设备100也可以不提取基于脉搏波的指标的极值,而是根据基于脉搏波的指标变为规定的值以下的时间范围来推定被检者的糖代谢以及脂质代谢的状态。
例如,在上述的实施方式中,对推定饭前饭后的血液的流动性的情况进行了说明,但电子设备100所执行的处理并不限定于此。电子设备100既可以推定运动前后以及运动时的血液的流动性,也可以推定洗澡前后以及洗澡时的血液的流动性。
在上述的实施方式中,第一臂部134的固有振动频率也可以与所获取的脉搏波的振动频率接近。例如,在所获取的脉搏波的振动频率为0.5~2Hz(脉搏30~120)的情况下,第一臂部134也可以具有0.5~2Hz的范围中的任一固有振动频率。第一臂部134的固有振动频率能够通过改变第一臂部134的长度、重量、弹性体140的弹性率或弹簧常数等而实现最优化。通过使第一臂部134的固有振动频率最优化,电子设备100能够进行更高精度的测定。
在上述的实施方式中,以电子设备100测定脉搏波进行了说明,但也可以不必通过电子设备100测定脉搏波。例如,电子设备100可以与计算机或移动电话等的信息处理装置有线或无线地连接,将角速度传感器131所获取的角速度的信息向信息处理装置发送。在该情况下,信息处理装置也可以基于角速度的信息来测定脉搏波。信息处理装置也可以执行糖代谢和脂质代谢的推定处理等。在与电子设备100连接的信息处理装置执行各种信息处理的情况下,电子设备100也可以不具有控制部143、存储部145、通知部147等。另外,在电子设备100通过有线与信息处理装置连接的情况下,电子设备100也可以不具有电源部144,而从信息处理装置供给电力。
电子设备100也可以不具有上述的实施方式中说明的全部的可动部。电子设备100也可以仅具有在上述的实施方式中说明的可动部中的一部分。例如,测定部120也可以不构成为相对于基部111能够旋转。例如,主体部121也可以不构成为相对于外装部122能够在上下方向上位移。例如,主体部121也可以不构成为相对于外装部122能够旋转。
在上述实施方式中,说明了通过被检者拉动佩戴部110的另一端110b,使外装部122的上端侧向y轴负方向位移。然而,外装部122可以构成为通过其它机构使上端侧位移。例如,在固定部112的上端侧安装有能够向y轴负方向按压的机构,该机构可构成为将外装部122的上端侧向y轴负方向按压。作为这种机构,例如可以使用滚珠丝杠。
在图1所示的例子中,从正面观察时成为外装部122的旋转轴的轴S1配置于外装部122的y轴负方向侧,但轴S1的配置并不限定于此。轴S1例如也可以配置在连结作为第一臂部134的旋转位移的外周端的另一端134b与轴S2的直线L1的附近。例如,如图14所示,轴S1也可以配置在将另一端134b与轴S2连结的直线L1上。在图14所示的例子中,由于第一臂部134从另一端134b延伸到轴S2,因此,轴S1配置在第一臂部134所延伸的直线L1上。在轴S1配置于直线L1上的情况下,以轴S2为旋转轴的触脉部132的位移方向L2与以轴S1为旋转轴的情况下的触脉部132的位移方向一致。因此,在以轴S1为旋转轴使外装部122旋转的情况下,触脉部132所接触的手腕上的位置不易变化。触脉部132所接触的手腕上的位置与轴S1在第一臂部134所延伸的直线L1上越接近,越难以随着外装部122的旋转而变化。因此,轴S1越接近直线L1,被检者为了将电子设备100固定于手腕而使外装部122旋转时,触脉部132与手腕的接触状态的变化越小。因此,轴S1越接近直线L1,在使触脉部132与期望的位置接触的状态下,容易将电子设备100佩戴于手腕。
另外,在上述实施方式中,对端部122d作为阻挡件发挥功能进行了说明。但是,在本发明中,作为阻挡件发挥功能的部分并不限定于端部122d。例如,如图15所示,也可以在主体部121上设置阻挡件部136。该阻挡件部136可以位于第一臂部134的触脉部132的下部。在该情况下,阻挡件部136与主体部121的上下移动连动地移动,因此,即使对于手腕较细的人而言也能够作为阻挡件发挥功能。
(第二实施方式)
接下来参照附图对第二实施方式进行说明。
第二实施方式的电子设备在上述的第一实施方式的电子设备100的基础上,变更了传感器部130的结构。以下,对第二实施方式的电子设备进行说明,但适当地简化或省略与上述第一实施方式的电子设备100相同或类似的说明。
图16是表示从正面观察时第二实施方式的电子设备的外装部和传感器部的概略图。如图16所示,第二实施方式的电子设备200是通过将上述第一实施方式的电子设备100(参照图3)中的传感器部130改变为传感器部230的设备。在第二实施方式的电子设备200中,除了传感器部230以外的结构可以与第一实施方式的电子设备100相同。
如图16所示,在第二实施方式的电子设备200的传感器部230中,第一臂部134与第二臂部135连接。更具体地说,第一臂部134的一端134a与第二臂部135的下侧的一端135a连接。如图16中的箭头E所示,第一臂部134以一端134a为轴(旋转轴S2)且另一端134b侧能够旋转的方式与第二臂部135连接。
另外,第一臂部134的另一端134b侧经由弹性体140与第二臂部135的上侧的另一端135b侧连接。弹性体140例如可以是弹簧、树脂或海绵等那样的任意的弹性体。在传感器部130中,第一臂部134通过弹性体140的弹性,被向被检者的被检部位侧施力。
如图16所示,在第二实施方式的电子设备200的传感器部230中,第一臂部134具有弹性构件240、以及传感器231。另外,如图16所示,第一臂部134也可以具有触脉部132。
如图16所示,弹性构件240在第一臂部134中配置于与设置有弹性体140的面相反的一侧的面上。即,弹性构件240和弹性体140可以在第一臂部134中配置于彼此相反侧的面上。
弹性构件240可以构成为包括例如弹簧、树脂或海绵等那样的具有适度的弹性的任意的弹性体。弹性构件240例如也可以由具有规定的弹性的规定的厚度的硅片构成。将在后面进一步说明弹性构件240。弹性构件240与第一臂部134可以用粘接剂或双面胶带等粘接。这里,弹性构件240与第一臂部134的粘接可以减少对弹性构件240的变形造成的影响。即,即使将弹性构件240与第一臂部134粘接,弹性构件240也能够适度地变形。
如图16所示,在弹性构件240中,在弹性构件240与第一臂部134的粘接面的相反一侧的面上配置有传感器231。第二实施方式的电子设备200的传感器部130在传感器231与第一臂部134之间具有弹性构件240。即,弹性构件240介于传感器231与第一臂部134之间。在第二实施方式中,传感器231能够直接或间接地检测被检者的被检部位中的脉动。传感器231与弹性构件240可以用粘接剂或双面胶带等粘接。这里,传感器231与弹性构件240的粘接可以减少对弹性构件240的变形造成的影响。即,即使将传感器231与弹性构件240粘接,弹性构件240也能够适度地变形。
传感器231例如可以是加速度传感器,也可以是陀螺传感器那样的传感器。对于传感器231,将在后面进一步描述。另外,传感器231也可以是第一实施方式的传感器部130中的角速度传感器131。传感器231也可以检测基于被检者的脉搏波的触脉部132的位移。
如图16所示,在传感器231中,在传感器231与弹性构件240的粘接面的相反一侧的面上配置有触脉部132。传感器231与触脉部132通过用粘接剂或双面胶带等粘接而结合。触脉部132是在利用电子设备200进行测定时,与成为被检者的血液的脉搏波的测定对象的被检部位接触的部分。在本实施方式中,触脉部132也与例如尺动脉或者桡动脉所在的位置接触。触脉部132可以与第一实施方式的电子设备100中的触脉部132同样地构成。
这样,第二实施方式的传感器部230具有臂部134、传感器231、以及弹性构件240。臂部134被向被检者的被检部位侧施力。传感器231检测被检者的被检部位中的脉动。弹性构件240介于传感器231与臂部134之间。图16所示的传感器部230的结构是例示的,也可以适当地进行变形或变更。例如,传感器231的至少一部分也可以构成为埋入弹性构件240以及触脉部132中的至少一个中。另外,在简化的结构中,也可以省略触脉部132。
图17是部分表示被检者佩戴了图16所示的电子设备200的状态的概略图。图17仅表示第二实施方式的电子设备200中的主要是传感器部230的一部分。
如图17所示,在本实施方式中,在电子设备200处于佩戴状态下,触脉部132与被检者的被检部位即作为被检者的右手的拇指侧的动脉的桡动脉上的皮肤接触。通过配置在第二臂部135与第一臂部134之间的弹性体140的弹力,第一臂部134(的另一端134b侧)被向被检者的被检部位侧施力。另外,经由弹性构件240(以及传感器231)配置于第一臂部134的触脉部132与被检者的桡动脉上的皮肤接触。触脉部132根据被检者的桡动脉的移动即根据脉动而位移。因此,与触脉部132结合的传感器231也根据被检者的桡动脉的移动即脉动而位移。
在本实施方式中,与触脉部132结合的传感器231经由弹性构件240与第一臂部134结合。因此,传感器231由于弹性构件240的柔性而被赋予一定程度的自由的可动区域。另外,由于弹性构件240的柔性,不易妨碍传感器231的移动。进一步地,弹性构件240由于具有适度的弹性,因此追随被检者的被检部位中的脉动而变形。因此,在本实施方式的电子设备200中,传感器231能够敏感地检测出被检者的被检部位中的脉动。这样,在本实施方式中,弹性构件240可以根据被检者的被检部位中的脉动而变形。另外,弹性构件240也可以弹性变形为传感器231能够检测出被检者的被检部位中的脉动的程度。
在本实施方式中,传感器231例如也可以是陀螺传感器(回转仪)那样的,检测多个轴的物体的角度(倾斜度)、角速度以及角加速度中的至少任一个的传感器。在该情况下,传感器231能够检测出基于被检者的被检部位中的脉动的复杂的移动作为关于多个轴的相应的参数。另外,传感器231也可以是将三轴陀螺传感器与三轴加速度传感器进行组合后的六轴传感器。
例如,如图17所示,传感器231可以检测以α轴、β轴以及γ轴的三个轴中的每个轴为中心的旋转运动。例如,α轴可以是沿着与被检者的桡动脉大致正交的方向的轴。另外,β轴例如可以是沿着与被检者的桡动脉大致平行的方向的轴。另外,γ轴例如可以是沿着与α轴以及β轴的两者大致正交的方向的轴。
这样,在本实施方式中,传感器231也可以检测出被检者的被检部位中的脉动作为以规定的轴为中心的旋转运动的一部分。另外,传感器231也可以将在被检者的被检部位中的脉动作为至少两个轴的旋转运动来检测,也可以作为三个轴的旋转运动来检测。在本发明中,“旋转运动”不一定是在圆的轨道上位移一周以上的运动。例如,在本发明中,旋转运动也可以是在圆的轨道上位移小于一周的部分位移(例如沿弧那样的位移)。
图18是表示通过传感器231检测出分别以图17所示的α轴、β轴以及γ轴的三个轴中的每个轴为中心的旋转运动的结果的例子的图表。图18表示通过图17所示的传感器231,基于检测以三个轴的各个轴为中心的旋转运动的结果的信号强度的时间变化。在图18中,横轴表示经过时间,纵轴表示由传感器231检测出的信号的强度。
图18中用粗实线表示基于以图17所示的α轴为中心的传感器231的旋转运动的信号强度的时间变化。另外,在图18中用单点划线表示基于以图17所示的β轴为中心的传感器231的旋转运动的信号强度的时间变化。另外,在图18中用虚线表示基于以图17所示的γ轴为中心的传感器231的旋转运动的信号强度的时间变化。在图18所示的例子中,基于以α轴及β轴为中心的传感器231的旋转运动的信号强度的时间变化分别具有基于被检者的脉搏波的显著的峰值。
如图18所示,本实施方式的电子设备200例如能够通过传感器231来检测以三个轴中的每个轴为中心的旋转运动。因此,本实施方式的电子设备200能够通过对由传感器231检测出的多个结果进行合计等来合成,从而提高被检者的脉搏波的检测灵敏度。这样的合计等的运算例如可以通过控制部143来执行。在该情况下,控制部143可以基于传感器231检测到的脉动来计算出脉搏波的指标。
例如,在图18所示的例子中,基于以α轴以及β轴为中心的传感器231的旋转运动的信号强度的时间变化分别具有基于被检者的脉搏波的显著的峰值。因此,控制部143例如通过分别对关于α轴、β轴和γ轴的检测结果进行合计,从而能够提高被检者的脉搏波的检测精度。因此,根据本实施方式的电子设备200,能够提高被检者在测定脉搏波时的有用性。
这样,本实施方式的电子设备200还可以包括控制部143,该控制部143计算基于由传感器231检测出的脉动的脉搏波的指标。在该情况下,控制部143也可以将由传感器231检测为至少两个轴的旋转运动(例如,三个轴的旋转运动)的结果进行合成(例如,合计)。根据本实施方式的电子设备200,能够检测多个方向的脉搏波信号。因此,根据本实施方式的电子设备200,通过合成关于多个轴的检测结果,与关于一个轴的检测结果相比,信号强度提高。因此,根据本实施方式的电子设备200,能够检测出SN比良好的信号,并能够提高检测灵敏度,从而能够进行稳定的测定。
另外,在关于图18所示的γ轴的检测结果中,与关于其他α轴或β轴的检测结果相比,基于被检者的脉搏波的峰值没有显著地出现。这样,若将关于γ轴的检测结果那样的信号电平较低的检测结果与关于其他轴的检测结果进行合计,则也可能存在SN比降低的情况。另外,信号电平较低的检测结果也存在大部分被视为噪声分量的情况。在这种情况下,信号电平较低的检测结果有时也不包括良好的脉搏波分量。因此,在本实施方式中,当关于多个轴的检测结果中存在检测结果未达到规定的阈值的轴时,控制部143也可以不将该轴的检测结果合计。
例如,与图18所示的例子的情况同样地,假定通过传感器231检测某个被检者的脉动作为以α轴、β轴以及γ轴中的每个轴为中心的旋转运动的情况。作为其结果,如图19A所示,假设关于α轴的检测结果中的峰值超过规定的阈值。另外,如图19B所示,假设关于β轴的检测结果中的峰值也超过规定的阈值。另外,如图19C所示,假设关于γ轴的检测结果中的峰值也超过规定的阈值。在这样的情况下,控制部143也可以计算出对关于α轴的检测结果、关于β轴的检测结果以及关于γ轴的检测结果全部进行合计后的值作为基于传感器231检测出的脉动的脉搏波的指标。
另一方面,例如,如图20A所示,作为检测某个被检者的脉动的结果,假设关于α轴的检测结果中的峰值超过规定的阈值。另外,如图20B所示,假设关于β轴的检测结果中的峰值也超过规定的阈值。然而,如图20C所示,假设关于γ轴的检测结果中的峰值未超过规定的阈值。在这种情况下,控制部143也可以仅计算出对关于α轴的检测结果以及关于β轴的检测结果进行合计后而得到的值作为基于传感器231检测出的脉动的脉搏波的指标。
在进行这种处理的情况下,控制部143也可以针对各个轴单独设定作为是否将关于各个轴的检测结果包含在合计中的基准的阈值,也可以针对各个轴确定相同的值。在任一种情况下,在关于各个轴的检测结果中,也可以适当设定分别适当地检测出被检者的脉动那样的阈值。
这样,在本实施方式的电子设备200中,控制部143也可以仅对传感器231检测为至少两个轴的旋转运动的结果中的具有规定的阈值以上的分量的结果进行合成。因此,根据本实施方式的电子设备200,能够抑制检测结果的SN比的降低。因此,根据本实施方式的电子设备200,能够提高被检者在测定脉搏波时的有用性。
另外,如上所述,还假定在对关于多个轴的检测结果进行合计时,若将关于各个轴的检测结果就这样直接进行合计,则产生不良的结果。这被设想是由于被检者的脉动的方向与传感器231之间的位置关系,从而引起由传感器231检测出的结果的极性不匹配。例如,还假定在使用传感器231检测到被检者的右手的脉动的情况和检测到左手的脉动的情况下,关于某个轴的检测结果的极性反转。
例如,在检测到被检者的脉动的情况下,在关于某个轴的检测结果中,如图21A所示,大致周期性地检测出向上的峰值。然而,同时,也假定在关于其他轴的检测结果中,如图21B所示,相反地,大致周期性地检测出向下的峰值。这样,在关于多个轴的检测结果中极性反转的情况下,也假定若直接单纯地进行合计,则峰值相互抵消从而得不到良好的结果。
因此,在本实施方式中,控制部143也可以在关于多个轴的检测结果中极性反转的情况下,使关于至少一个轴的检测结果的极性反转之后,使其与关于其他轴的检测结果进行合计。
例如,如图21A以及图21B所示,在关于两个轴的检测结果中极性反转的情况下,控制部143也可以根据关于其他轴的检测结果使关于至少一个轴的检测结果的极性反转。在该情况下,控制部143例如可以根据图21A所示的检测结果的极性使图21B所示的检测结果的极性反转。
图22A与图21A所示的检测结果相同,示出了在检测出被检者的脉动的情况下,在关于某个轴线的检测结果中,大致周期性地检测到向上的峰值的状态。另一方面,图22B示出了使图21B所示的检测结果的极性反转的状态。图22A和图22B所示的检测结果分别具有相同的极性,在相同的时刻无论哪一个都大致周期性地检测出向上的峰值。控制部143通过执行这样的处理后,对关于多个轴的检测结果进行合计,由此,能够提高被检者的脉搏波的检测精度。
这样,在本实施方式的电子设备200中,控制部143也可以使由传感器231检测为至少两个轴的旋转运动的结果的各自的极性对齐之后,对这些结果进行合成。根据本实施方式的电子设备200,能够提高被检者的脉搏波的检测精度。因此,根据本实施方式的电子设备200,能够提高被检者测定脉搏波时的有用性。
如上所述,在通过使关于至少一个轴的检测结果的极性反转,从而进行使关于多个轴的检测结果的极性对齐的处理的情况下,需要判定各个检测结果中的极性的方向。能够使用各种方法来进行这种极性方向的判定。例如,控制部143也可以判定关于各个轴的检测结果的峰值是朝向信号强度的正方向侧还是朝向信号强度的负方向侧。另外,例如,控制器143也可以判定关于各个轴的检测结果的峰值是大于信号的平均值,还是小于信号的平均值。另外,当使关于至少一个轴的检测结果的极性反转时,控制部143也可以将反转极性的检测结果乘以-1。
进一步地,在上述那样适当地反转检测结果的极性之后,控制部143也可以对该检测结果的整体加减规定值,然后与关于其他轴的检测结果进行合计。这里,对检测结果的整体加减规定值相当于,例如使图22B所示的图表的整体沿纵轴方向(信号的正方向或负方向)移动。另外,控制部143在将关于多个轴的检测结果进行合计之前,可以对关于各个轴的检测结果进行适当加权,或者也可以适当校正关于各个轴的检测结果。
(第二实施方式的变形例)
接下来,对第二实施方式的变形例进行说明。
如上所述,第二实施方式的电子设备200是在第一实施方式的电子设备100的基础上将传感器部130变更为传感器部230的设备。在第二实施方式的电子设备200中,只要维持传感器部230的结构,则除此以外的功能部和/或构件也可以适当设为任意的结构。以下,对几个这样的实施例进行说明。
图23以及图24是第二实施方式的变形例的电子设备的概略的外观立体图。如图23及图24所示,在第二实施方式的变形例的电子设备300中,传感器部230可以与上述的第二实施方式的电子设备200同样地构成。
图23及图24表示从各自不同的视点观察电子设备300时的概略外观。电子设备300具有外装部310以及测定部320。
在被检者使被检部位与测定部320接触的状态下,电子设备300测定被检者的生物体信息。电子设备300所测定的生物体信息是由测定部320能够测定的被检者的脉搏波。在本变形例中,以电子设备300使被检者的手腕与测定部320接触而获取脉搏波为一例进行说明。
测定部320用于测定生物体信息。外装部310从外部覆盖测定部320中的至少一部分。外装部310能够保护测定部320的覆盖部分。被检者在使用电子设备300测定生物体信息的情况下,通过用一只手保持外装部310来支撑电子设备300。
外装部310具有:罩部311、两个侧面部312a、312b、背面部313、以及底面部314。在外装部310中,两个侧面部312a、312b、背面部313构成在测定生物体信息的情况下由被检者保持的保持面。
图25是表示被检者使用电子设备300来测定生物体信息的情形的概略图。在测定生物体信息的情况下,被检者使罩部311和底面部314与例如桌子等的台面接触,并将电子设备300载置于台面上。在罩部311和/或底面部314的与台面接触的位置的至少一部分可以设置有例如橡胶等的防滑件。通过设置防滑件,容易将电子设备300稳定地载置于台面上。
在被检者将电子设备300载置在台面上的状态下,将手腕放置于罩部311,将手腕推压至测定部320一侧。被检者将手腕推压至测定部320,使得例如后述的测定部320的触脉部132与尺动脉或桡动脉所在的位置接触。此时,被检者通过使用未推压手腕的一侧的手支撑保持面并向该手腕的一侧推压,能够维持触脉部332与手腕的接触状态。电子设备300测定在被检者的手腕中流过尺动脉或桡动脉的血液的脉搏波。
参照图23和图24,在本变形例中,背面部313构成为大致长方形的平板形状。在本说明书中,如图23及图24所示,以下将大致长方形的平板形状的背面部313的短边方向设为x轴方向,将大致长方形的平板形状的背面部313的长边方向设为z轴方向,将平板形状的背面部313的正交方向(即xz平面的正交方向)设为y轴方向进行说明。另外,电子设备300的一部分构成为可动,但在本说明书中说明与电子设备300相关的方向时,只要没有特别提及,则设为表示图23以及图24所示的状态下的x、y、z轴方向。另外,将y轴负方向称为电子设备300的正面侧,将y轴正方向称为电子设备300的背面侧。另外,将x轴正方向设为电子设备300的左侧,将x轴负方向设为电子设备300的右侧。
底面部314例如构成为平板形状。在电子设备300中,底面部314配置为在大致长方形的背面部313的下方的短边处与背面部313正交。背面部313和底面部314也可以相互固定。在底面部314固定有沿保持面的方向即z轴方向延伸的轴部315。
两个侧面部312a和312b构成为平板形状。在电子设备300中,两个侧面部312a和312b配置为在大致长方形的背面部313的两个长边的各个处与背面部313正交。背面部313和两个侧面部312a以及312b也可以相互固定。
在本变形例中,构成外装部310的保持面的侧面部312a、312b和背面部313在俯视时形成为
在电子设备300中,由背面部313保护测定部320的背面侧。另外,由底面部314保护测定部320的底面侧。另外,由两个侧面部312a、312b保护测定部320的左右的侧面侧。
罩部311构成为包括大致长方形的平板形状的构件;以及设置为从该平板形状的构件的长边与该平板形状的构件正交的构件。如图25的一个例子所示,被检者将手腕放置于在罩部311中设置为与平板形状的构件正交的构件上,执行基于电子设备300的生物体信息的测定。在测定生物体信息时,通过将手腕载置于罩部311上,被检者能够使手腕的位置稳定。其结果,被检者能够使测定部320稳定地与手腕接触,从而能够容易提高生物体信息的测定精度。
罩部311在一端311a侧与侧面部312a、312b连接。一端311a在图23所示的状态下是指背面侧的端部。如图23的箭头A所示,罩部311以连结罩部311与侧面部312a、312b各自的连接部316a、316b的直线(轴)S1为轴,以能够在yz平面上旋转的方式与侧面部312a、312b连接。也就是说,能够使罩部311在以下的两个状态之间进行位移:如图23所示那样平板形状的构件沿着xy平面的状态、通过以轴S1为轴在yz平面上旋转而平板形状的构件沿着xz平面的状态。以下,将如图23所示那样罩部311的平板形状的构件沿着xy平面的状态也表述为电子设备100打开的状态。另外,以下,将罩部311的平板形状的构件沿着xz平面的状态也表述为电子设备300关闭的状态。
图26是表示电子设备300的未使用时的状态,即未使用电子设备300进行生物体信息的测定的情况下的状态的概略的外观立体图。在未使用电子设备300时,如图26所示,被检者能够使电子设备300的罩部311处于关闭的状态。通过使罩部311处于关闭的状态,测定部320的正面侧得到保护。另外,通过使罩部311处于关闭的状态,与电子设备300处于打开的状态相比,成为折叠成较小的状态,因此,被检者容易将电子设备300放入例如箱子或手提包等中进行携带。
参照图23和图24,测定部320具有主体部321以及传感器部230。
主体部321具有壁面部322,该壁面部322具有左右的两个侧面侧和背面侧的这三个方向的壁面。即,从上方观察电子设备300时,壁面部322构成为
主体部321在壁面部322的背面侧具有连接部323。连接部323具有用于使轴部315穿过的轴承,通过使轴部315穿过该轴承,从而测定部320经由轴部315安装于外装部310。因此,如图23的箭头B所示,测定部320在与作为保持面的侧面部312a、312b和背面部313交叉的xy平面上能够以轴部315为中心旋转的方式安装于外装部310。也就是说,测定部320相对于外装部310以能够沿着xy平面旋转的方式安装于外装部310。
另外,如图23和图24的箭头C所示,测定部320沿着轴部315即沿着z轴方向,以相对于外装部310在上下方向上能够位移的方式安装于外装部310。在本变形例中,由于轴部315沿着保持面而构成,因此,测定部320能够沿着保持面位移。
传感器部230配置于由主体部321的壁面部322形成的、由壁面所包围的空间。这里,参照图27对测定部320的细节进行说明。图27是表示传感器部230以及主体部321的概略图。图27是从正面观察时电子设备300的中央沿yz平面的剖视图,并且是表示从电子设备300左侧观察时的状态的图。但是,在图27中,关于壁面部322仅示出了背面侧。
如图27所示,主体部321在壁面部322的背面侧具有连接部323。连接部323具有用于使轴部315穿过的轴承323a。在轴承323a的内部设置有板簧324。由于板簧324的弹力,测定部320相对于轴部315的上下方向的位置被固定在规定的位置。
传感器部230具有臂部134。臂部134在一端333a侧与壁面部322连接。臂134例如在一端333a侧具有轴承,通过与壁面部322的左右的两侧面连接的轴S2穿过该轴承,从而臂部134与壁面部322连接。通过这样的方式将传感器部230与主体部321的壁面部322连接,如图27的箭头D所示,臂部134以轴S2为轴,另一端333b侧能够在yz平面上旋转。臂部134只要构成为能够沿着与测定部320旋转位移的表面交叉的面进行位移即可。
臂部134经由弹性体340与壁面部322的背面侧的壁面连接。臂部134与壁面部322连接,以使在弹性体340未被按压的状态下,另一端333b成为比壁面部322的正面侧的端部322a向正面侧突出的状态。即,在弹性体340未被按压的状态下,从电子设备300的左侧观察测定部320时,另一端33b比壁面部322向正面侧突出。
弹性体340例如也可以是弹簧。但是,弹性体340并不限定于弹簧,例也可以是其他任意的弹性体例如树脂或海绵等。在图27所示的例子中,弹性体340是扭转螺旋弹簧,一端333a与另一端333b的中央附近通过是扭转螺旋弹簧与壁面部322连接。
在本变形例中,臂部134也可以与上述的第二实施方式的电子设备200的第一臂部134同样地构成。
电子设备300在外装部310或测定部320的适当位置可以具有用于使电子设备300测定脉搏波的各种功能部。例如,电子设备300可以具有上述控制部、电源部、存储部、通信部、通知部以及使这些功能部动作的电路和连接它们的线缆等。
(第二实施方式的其他变形例)
图28是第二实施方式的其他变形例的电子设备的概略的外观立体图。
如图28所示,第二实施方式的其他变形例的电子设备400是将上述电子设备300的结构简化,进而佩戴于被检者的手腕的夹子型。被检者或检查者能够将电子设备400的夹持部分设为打开的状态,以被检者的手腕的周围被电子设备400夹持的方式进行定位后,使电子设备400的夹持部分在适当的位置处于关闭的状态。在电子设备400的夹持部分处于关闭的状态下,臂部134所具有的触脉部132与被检者的被检部位接触。这里,臂部134构成为被向被检者的被检部位侧施力。具体而言,臂部134例如也可以构成为利用板簧等以轴S2为中心向被检者的被检部位侧施力。这样,通过电子设备400,也能够提高被检者测定脉搏波时的有用性。
(第二实施方式的又一其他变形例)
图29是第二实施方式的其他变形例的电子设备的概略的外观立体图。
如图29所示,第二实施方式的其他变形例的电子设备500简化了上述的电子设备300的结构,并且通过载置被检者的手腕来检测脉搏波。臂部134以能够位移的方式安装于电子设备500的主体部121。这里,臂部134构成为被向被检者的被检部位侧施力。被检者可以通过将自己的手腕以适当的压力推压到电子设备500的适当位置来进行测定。当被检者将手腕放在电子设备500上时,被检者的被检部位与臂134所具有的触脉部132接触。这样,电子设备500也可以提高被检者在测定脉搏波时的有用性。
(第二实施方式的又一其他变形例)
图30是概略地表示第二实施方式的其他的变形例的电子设备的图。
如图30所示,第二实施方式的其他变形例的电子设备是简化了上述的电子设备200或电子设备300等的结构而仅使传感器部130独立的设备。图30示出了由传感器部130检测被检者的颈动脉的脉搏波的例子。在被检者通过传感器部130检测被检部位的脉搏波时,臂部134所具有的触脉部132与被检者的被检部位接触。在该情况下,被检者可以用自己的手等按压传感器部130的第二臂部135。通过被检者将第二臂部135按压到被检部位侧,臂部134向被检者的被检部位侧施力。被检者或检查者能够通过以适当的压力将传感器部130按压到被检者的适当位置来进行测定。这样,通过传感器部130也可以提高被检者在测定脉搏波时的有用性。
(第三实施方式)
接下来,对第三实施方式进行说明。第三实施方式的电子设备在上述的第二实施方式(包括各个变形例)的电子设备中,执行用于实现更好的测定的动作。第三实施方式的电子设备,为了良好地测定被检者的生物体信息,辅助传感器在被检者的被检部位的定位。因此,检查者或被检者能够容易地在被检者的被检部位定位传感器。被检者的脉动不仅个体差异大,根据被检者的哪个部位作为被检部位,测定结果也会产生相当大的差异。因此,如果在被检者的被检部位适当地辅助传感器的定位,使得被检者的生物体信息被良好地测定,则能够大幅提高电子设备的有用性。以下,对这样的电子设备进行说明。
第三实施方式的电子设备可以具有与例如图16和17、以及图23到图30中所示的电子设备(或传感器部)相同或类似的结构。即,在第三实施方式的电子设备中,例如与图17所示的第二实施方式的电子设备同样地,传感器231可以被配置为向被检者的被检部位施力。另外,传感器231例如如图17所示,可以通过弹性构件240的弹性向被检者的被检部位施力。在第三实施方式中,与第二实施方式同样地,传感器231能够检测被检者的被检部位中的脉动。
另外,第三实施方式的电子设备例如可以具有图6的框图所示的功能部中的传感器部130(传感器231)、控制部143以及通知部147。在第三实施方式中,通知部147通知与传感器231在被检部位的位置相关的信息。将在后面进一步说明传感器231在被检部位的位置的信息。另外,第三实施方式的电子设备也可以适当地具有图6的框图所示的其他功能部。从其他方面考虑,第三实施方式的电子设备能够任意地配置。以下,适当地简化或省略与第一实施方式或第二实施方式相同的说明。
图31是表示使第三实施方式的电子设备的传感器231向被检者的右手施力的状态的图。在第三实施方式的电子设备中,传感器231在向被检者的被检部位侧施力的状态下进行测定。在第三实施方式的电子设备中,可以适当地配置传感器231以外的功能部。因此,图31仅示出了构成第三实施方式的电子设备的功能部中的传感器231,并且省略了其他功能部的图示。另外,在第三实施方式的电子设备中,上述的控制部143和通知部147可以内置在第三实施方式的电子设备中,也可以设置在第三实施方式的电子设备的外部。当控制部143和通知部147设置在第三实施方式的电子设备的外部时,传感器231与控制部143可以构成为通过有线或无线连接。
图31通过虚线示出了被检者的右手中的桡动脉的例子。如图31所示,第三实施方式的电子设备的传感器231例如能够将与被检者的桡动脉的位置对应的部位作为被检部位,来检测被检者的桡动脉的脉动。在第三实施方式的电子设备中,与第二实施方式同样地,传感器231可以通过弹性构件240的弹性向被检部位施力。
图32是放大表示图31中的传感器231和被检者的手腕的图。图32与图31同样地,是表示使第三实施方式的电子设备的传感器231向被检者的右手腕施力的状态的图。图32概略地示出了被检者的右手的桡动脉。在图32中,将被检者的小指侧表示为“下”,将被检者的拇指侧表示为“上”。从图31和图32可知,若被检者将右手的手掌(和传感器231)朝向自己,从肘部到臂端朝向水平方向,则被检者的小指侧朝向“下”,被检者的大拇指侧朝向“上”。如图32所示,在被检者的桡动脉中,动脉流(血流)从左向右流动。
图33是从与图32不同的方向观察图32所示的传感器231和被检者的手腕的剖视图。图33是从图32所示的上方(拇指侧)朝向下方(小指侧)观察图32所示的传感器231和被检者的手腕的剖视图。图33概略地示出了在被检者的手腕的截面中被检者的桡骨和桡动脉的例子。如图33所示,在第三实施方式的传感器231中,与第二实施方式同样地,在与被检者的被检部位接触的部分,可以具有触脉部132。另外,在第三实施方式的电子设备中,与第二实施方式同样地,传感器231可以通过弹性构件240的弹性向被检部位施力。在图32和图33中,省略了弹性构件240的图示。
在第三实施方式的电子设备中,与第二实施方式同样地,弹性构件240可以构成为包括例如弹簧、树脂或海绵等那样的具有适度弹性的任意的弹性体。弹性构件240例如可以是形成具有规定的弹性的规定的厚度的硅片的构件。在第三实施方式的电子设备中,传感器231由于弹性构件240的柔性而被赋予一定程度的自由的可动区域。另外,由于弹性构件240的柔性,不易妨碍传感器231的移动。进一步地,弹性构件240通过具有适度的弹性,追随被检者在被检部位中的脉动而变形。因此,在第三实施方式的电子设备中,传感器231能够敏感地检测被检者的被检部位中的脉动。这样,在第三实施方式的电子设备中,弹性构件240可以根据被检者的被检部位中的脉动而变形。另外,弹性构件240也可以弹性变形为传感器231能够检测到被检者的被检部位中的脉动的程度。
与第二实施例同样地,第三实施方式的电子设备的传感器231例如也可以是加速度传感器或陀螺传感器那样的传感器。以下,将对第三实施方式的电子设备的传感器231是陀螺传感器的情况进行说明。这样,第三实施方式的电子设备的传感器231可以检测被检者的被检部位中的脉动,作为以规定的轴为中心的旋转运动的一部分。更具体地说,传感器231可以将被检者的被检部位中的脉动检测为至少两个轴的旋转运动,也可以检测为例如三个轴的旋转运动。例如,如图32和图33所示,传感器231也可以检测出被检者的被检部位中的脉动作为α轴、β轴和γ轴这三个轴的旋转运动。
在被检者的桡动脉因血流而脉动的情况下,桡动脉的一部分因脉动而略微膨胀,比其他部分变粗。另外,这样膨胀的部分沿着桡动脉,随着血液流动而移动。例如,在图33所示的桡动脉中,因脉动而略微膨胀的部分向图中所示的血流方向移动。若图33所示的桡动脉中因脉动而略微膨胀的部分到达传感器231的位置(被检部位),则传感器231检测以图33所示的α轴为中心的顺时针旋转的微小的旋转运动。然后,若桡动脉中因脉动而略微膨胀的部分通过了传感器231的位置(被检部位),则传感器231检测通过弹性构件240的弹性以α轴为中心的逆时针旋转的微小的旋转运动。通过这样的方式,第三实施方式的电子设备能够检测被检者的被检部位中的脉动,作为以α轴为中心的旋转运动(的一部分)。
如图32和图33所示,传感器231检测旋转运动的β轴可以是与被检者的桡动脉中的血流方向大致平行的轴。另外,如图32所示,传感器231检测旋转运动的γ轴可以是与被检者的被检部位的表面垂直的方向的轴。如图32和图33所示,传感器231检测旋转运动的α轴、β轴和γ轴这三个轴可以是相互正交的方向。图32及图33所示的传感器231从γ轴方向观察大致为正方形的形状。然而,在第三实施例中,从传感器231的γ轴方向观察的形状可以是圆形、椭圆形、长方形、菱形或平行四边形等各种形状。
接下来,将对第三实施例中的传感器231与动脉之间的位置关系进行说明。
图34A是说明第三实施方式的传感器231与被检者的桡动脉的位置关系的图。在图34A所示的例子中,传感器231的中心部分(γ轴贯穿传感器231的点)相比被检者的桡动脉更向上方(拇指侧)偏移。在这种情况下,当桡动脉中因脉动而略微膨胀的部分到达并通过传感器231的位置(被检部位)时,得到如图34B所示的检测信号。图34B是按各轴区别表示传感器231将被检者的被检部位中的脉动作为α轴、β轴和γ轴的三个轴的旋转运动而检测出的信号强度的时间变化的图表。
在图34A所示的配置中,假设桡动脉中因脉动而略微膨胀的部分到达并通过被检部位。在该情况下,如上所述,传感器231检测以图33所示的α轴为中心的顺时针旋转的微小的旋转运动,然后检测逆时针旋转的微小的旋转运动。因此,在以传感器231的α轴为中心的旋转运动的信号中检测到如图34B的上面部分所示的峰值。
另外,在该情况下,传感器231检测传感器231的与桡动脉重叠的部分被略微抬起那样的以图34A所示的β轴为中心的旋转运动。然后,传感器231检测通过弹性构件240的弹性而恢复原状那样的以图34A所示的β轴为中心的旋转运动。因此,在以传感器231的β轴为中心的旋转运动的信号中检测到如图34B的中间部分所示的峰值。
另外,在该情况下,若桡动脉中因脉动而略微膨胀的部分到达被检部位,则将传感器231的端部向血流的方向略微按压。因此,传感器231检测以图34A所示的γ轴为中心的顺时针旋转的微小的旋转运动。然后,若桡动脉中因脉动而略微膨胀的部分通过被检部位,则传感器231检测通过弹性构件240的弹性而恢复原状那样的以γ轴为中心的逆时针旋转的微小的旋转运动。因此,在以传感器231的γ轴为中心的旋转运动的信号中检测到如图34B的下面部分所示的峰值。这样,若传感器231的中心部分(γ轴贯穿传感器231的点)从桡动脉的位置偏移,则在以γ轴为中心的旋转运动的信号中检测出例如图34B的下面部分所示的峰值。
接下来,在图35A所示的例子中,传感器231的中心部分(γ轴贯穿传感器231的点)位于被检者的桡动脉上。即,在图35A所示的例子中,传感器231的中心部分(γ轴贯穿传感器231的点)的位置既不位于被检者的桡动脉的上方(拇指侧),也不位于下方(小指侧)。在这种情况下,当桡动脉中因脉动而略微膨胀的部分到达并通过传感器231的位置(被检部位)时,得到如图35B所示的检测信号。图35B也与图34B同样地,是按各轴区别表示传感器231将被检者的被检部位中的脉动作为α轴、β轴和γ轴的三个轴的旋转运动而检测出的信号强度的时间变化的图表。
在图35A所示的配置中,假设桡动脉中因脉动而略微膨胀的部分到达并通过被检部位。在该情况下,如上所述,传感器231检测以图33所示的α轴为中心的顺时针旋转的微小的旋转运动,然后检测逆时针旋转的微小的旋转运动。因此,在以传感器231的α轴为中心的旋转运动的信号中检测到如图35B的上面部分所示的峰值。
另外,在该情况下,传感器231检测传感器231的与桡动脉重叠的部分被略微抬起那样的以图35A所示的β轴为中心的旋转运动。然后,传感器231检测通过弹性构件240的弹性而恢复原状那样的以图35A所示的β轴为中心的旋转运动。因此,在以传感器231的β轴为中心的旋转运动的信号中,检测到如图35B的中间部分所示的峰值。
另一方面,在该情况下,如图35A所示,传感器231的中心部分(γ轴贯穿传感器231的点)位于表示桡动脉中的脉动(血流)的方向的线上。在该情况下,即使在桡动脉中因脉动而略微膨胀的部分到达被检部位,传感器231也不检测以γ轴为中心的顺时针旋转的微小的旋转运动,也不检测以γ轴为中心的逆时针旋转的微小的旋转运动。因此,在以传感器231的γ轴为中心的旋转运动的信号中,如图35B的下面部分所示,没有检测到明显的峰值。这样,在传感器231的中心部分(γ轴贯穿传感器231的点)未从桡动脉的位置偏移的情况下,在以γ轴为中心的旋转运动的信号中,例如如图35B的下面部分所示没有检测到峰值。
接下来,在图36A所示的例子中,传感器231的中心部分(γ轴贯穿传感器231的点)位于比被检者的桡动脉更向下(小指侧)偏移的位置。在这种情况下,若在桡动脉中因脉动而略微膨胀的部分到达并通过传感器231的位置(被检部位),则能得到图36B所示的检测信号。图36B也与图34B同样地,按各轴区别表示传感器231将被检者的被检部位中的脉动作为α轴、β轴以及γ轴的三个轴的旋转运动而检测出的信号的强度的时间变化的图表。
在图36A所示的配置中,在桡动脉中因脉动而略微膨胀的部分到达并通过了被检部位。在该情况下,如上所述,传感器231检测以图33所示的α轴为中心的顺时针旋转的微小的旋转运动,然后检测逆时针旋转的微小的旋转运动。因此,在以传感器231的α轴为中心的旋转运动的信号中检测到图36B的上面部分所示的峰值。
另外,在该情况下,传感器231检测以图36A所示的β轴为中心的传感器231的与桡动脉重叠的部分被略微抬起那样的旋转运动。然后,传感器231检测通过弹性构件240的弹性而恢复原状那样的以图36A所示的β轴为中心的旋转运动。因此,在以传感器231的β轴为中心的旋转运动的信号中检测到如图36B的中间部分所示的峰值。以图36A所示的β轴为中心的旋转运动变为与以图34A所示的β轴为中心的旋转运动相反的旋转方向。因此,图36A的中间部分所示的峰值与图34B的中间部分所示的峰值正负相反。
另外,在该情况下,当在桡动脉中因脉动而略微膨胀的部分到达被检部位时,将传感器231的端部向血流的方向略微按压。因此,传感器231检测以图36A所示的γ轴为中心的逆时针旋转的微小的旋转运动。然后,当桡动脉中因脉动而略微膨胀的部分通过被检部位时,传感器231检测通过弹性构件240的弹性而恢复原状那样的以γ轴为中心的顺时针旋转的微小的旋转运动。因此,在以传感器231的γ轴为中心的旋转运动的信号中检测出如图36B的下面部分的所示的峰值。这样,当传感器231的中心部分(γ轴贯穿传感器231的点)从桡动脉的位置偏移时,在以γ轴为中心的旋转运动的信号中检测出例如图36B的下面所示的峰值。以图36A所示的γ轴为中心的旋转运动变为与以图34A所示的γ轴为中心的旋转运动相反的旋转方向。因此,图36B的下面部分所示的峰值与图34B的下面部分所示的峰值正负相反。
如以上说明的那样,在传感器231的中心部分(γ轴贯穿传感器231的点)未从桡动脉的位置偏移的情况下,即,在传感器231在被检部位上位于适当的位置的情况下,在以γ轴为中心的旋转运动的信号中没有检测到峰值。另一方面,在传感器231的中心部分(γ轴贯穿传感器231的点)从桡动脉的位置偏移的情况下,即,在传感器231在被检部位上不位于适当的位置的情况下,在以γ轴为中心的旋转运动的信号中检测到峰值。因此,在第三实施方式的电子设备中,控制部143能够基于在以γ轴为中心的旋转运动的信号中是否检测到规定的峰值,来判定传感器231在被检部位是否位于适当的位置。
例如,如图34B所示,在γ轴的信号具有超过正方向的规定的阈值Th的峰值的情况下,控制部143能够判定为传感器231相对于桡动脉位于上方(拇指侧)。另外,如图36B所示,在γ轴的信号具有低于负方向的规定的阈值-Th的负方向的峰值的情况下,控制部143能够判定为传感器231相对于桡动脉位于下方(小指侧)。另一方面,如图35B所示,在γ轴的信号不具有超过正方向的规定的阈值Th的峰值,也不具有低于负方向的规定的阈值-Th的负方向的峰值的情况下,控制部143能够判定为传感器231处于适当的位置。
图34B至图36B所示的阈值Th、-Th可以是绝对值相同的正负的值,也可以是绝对值不同的正负的值。另外,阈值Th、-Th例如也可以根据被检者的性别和/或年龄段预先通过实验等来设定一般的代表值。另外,阈值Th、-Th例如也可以针对每个被检者考虑个人的身体的特性来确定。在被检者的被检部位中脉动的位置与传感器231的位置没有偏差的情况下,可以基于由传感器231适当地检测出被检者的脉动那样的位置关系,来适当地设定阈值Th、-Th。另外,关于阈值Th、-Th的正负,也可以基于在被检者的被检部位中脉动的位置与传感器231的位置有偏差的情况下检测出的γ轴方向的峰值的正负方向,来适当地设定。
在第三实施方式的电子设备1中,控制部143也可以基于如上述那样判定出传感器231在被检部位的位置的结果,从通知部147通知规定的信息。例如,通知部147也可以通过语音、显示和/或触感等,向被检者和/或检查者等通知在被检者的被检部位中脉动的位置与传感器231的位置是否有偏差。另外,通知部147也可以在被检者的被检部位中脉动的位置与传感器231的位置有偏差的情况下,通过语音、显示和/或触感等向被检者和/或检查者等通知能够进行适当测定的位置。例如,在判定为图34A所示的位置关系的情况下,通知部147也可以通知“请将传感器向下(小指侧)移动”这样的语音引导或显示等。另外,在判定为图36A所示的位置关系的情况下,通知部147也可以通知“请将传感器向上(拇指侧)移动”这样的语音引导或显示等。另一方面,在判定为图35A所示的位置关系的情况下,通知部147也可以通知“传感器的位置适当”这样的语音引导或者显示等。
进一步地,例如,在判定为图34A所示的位置关系的情况下,通知部147为了通过触感来通知应该使传感器向下(小指侧)移动的信息,例如也可以在电子设备的框体中在下方(小指侧)的任意的部位产生振动。另外,例如,在判定为图36A所示的位置关系的情况下,通知部147为了通过触感来通知应该使传感器向上(拇指侧)移动的信息,例如也可以在电子设备的框体中在上方(拇指侧)的任意的部位产生振动。另一方面,在判定为图35A所示的位置关系的情况下,通知部147例如可以在电子设备的框体中在下方(小指侧)和上方(拇指侧)这两个部位均产生振动,也可以在两个部位均不产生振动。
这样,在第三实施方式的电子设备中,控制部143基于由传感器231检测的被检者的被检部位中的脉动,来控制通知部147通知与传感器231在被检部位的位置相关的信息。这里,控制部143也可以基于由传感器231检测出的被检部位中的脉动,来判定传感器231在所述被检部位的位置。另外,控制部143也可以通过刺激被检者的视觉、听觉和触觉中的至少任一个来通知与传感器231在被检部位的位置相关的信息。
另外,在第三实施方式的电子设备中,控制部143也可以基于作为以规定的轴为中心的旋转运动的一部分而检测出的被检部位中的脉动,判定传感器231在被检部位的位置。这里,规定的轴例如也可以是γ轴那样的与被检部位的表面垂直的方向的轴。另外,在基于作为以规定的轴为中心的旋转运动的一部分而检测出的被检部位中的脉动的信号在规定的范围内的情况下,控制部143也可以判定为传感器231在被检部位的位置适当。在该情况下,控制部143可以控制通知部147通知传感器231在被检部位的位置适当的信息。
另一方面,在基于作为以规定的轴为中心的旋转运动的一部分而检测出的被检部位中的脉动的信号在规定的范围外的情况下,控制部143也可以判定为传感器231在被检部位的位置不适当。在该情况下,控制部143可以控制通知部147通知传感器231在被检部位的位置不适当的信息。另外,在该情况下,控制部143也可以控制通知部147通知传感器231在被检部位的位置适当的引导的信息。
图37是表示第三实施方式的电子设备的动作的过程的流程图。以下,对第三实施方式的电子设备的动作进行说明。
图37所示的动作可以在通过第三实施方式的电子设备测定被检者的生物体信息之前,在将传感器231适当地定位到被检者的被检部位时开始。
当图37所示的动作开始时,传感器231检测基于如图32和图33所示那样的以γ轴为中心的旋转运动的信号(步骤S1)。
若在步骤S1中检测到γ轴的信号,则控制部143判定该信号是否超过正方向的阈值Th(步骤S2)。例如,在图34B所示的例子中,γ轴的信号超过正方向的阈值Th。另一方面,在图35B和图36B所示的例子中,γ轴的信号没有超过正方向的阈值Th。
在步骤S2中,当γ轴的信号超过正方向的阈值Th时,控制部143进行控制,使得通知部147通知应该使传感器231向下(小指侧)移动的信息(步骤S3)。
另一方面,在步骤S2中,当γ轴的信号不超过正方向的阈值Th时,控制部143判定γ轴的信号是否低于负方向的阈值-Th(步骤S4)。例如,在图35B所示的例子中,γ轴的信号不低于负方向的阈值-Th。另一方面,在图36B所示的例子中,γ轴的信号低于负方向的阈值-Th。
在步骤S4中,当γ轴的信号低于负方向的阈值-Th时,控制部143进行控制,使得通知部147通知应该使传感器231向上(拇指侧)移动的信息(步骤S5)。
另一方面,在步骤S4中,当γ轴的信号不低于负方向的阈值-Th时,控制部143进行控制,使得通知部147通知传感器231在适当的位置的信息(步骤S6)。
根据第三实施方式的电子设备,为了良好地测定被检者的生物体信息,能够辅助传感器在被检者的被检部位上的定位。因此,根据第三实施例的电子设备,检查者或被检者能够容易地在被检者的被检部位定位传感器。因此,根据第三实施例的电子设备,不仅能够实现更好的测定,而且能够大幅提高电子设备的有用性。
附图标记的说明:
100 电子设备
110 佩戴部
110a、134a、135a 一端
110b、134b、135b 另一端
111 基部
112 固定部
120 测定部
121 主体部
122 外装部
122a 接触面
122b 面
122c 切口
122d 端部
123 结合部
124 轴部
125 开口部
130 传感器部
131 角速度传感器
132 触脉部
134 第一臂部
135 第二臂部
136 阻挡件部
140 弹性体
143 控制部
144 电源部
145 存储部
146 通信部
147 通知部
150 移动终端
151 服务器
230 传感器部
231 传感器
240 弹性构件
- 电子设备、外部电子设备及包括电子设备和外部电子设备的系统
- 电子设备用铜合金、电子设备用铜合金的制造方法、电子设备用铜合金轧材及电子设备用组件