人工智能低空飞行器
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及低空飞行器技术领域,具体为人工智能低空飞行器。
背景技术
低空飞行器是任何由人类制造、能飞离地面、在空间飞行并由人来控制的提供给个人使用的飞行物;随着飞行器普及,个人飞行器必然是未来发展方向;轻巧,灵活的低空,低速飞行器将是个人飞行器的发展方向;同时随着飞行器的普及,对飞行器的智能控制要求也会变得越来越严格。
目前市场上的人工智能低空飞行器一般都只能对飞行器的飞行方向进行控制,但是由与飞行器飞至高空时,与人眼看到的距离存在误差就需要对飞行器与其它物体之间的距离和其自身速度进行测量,避免在飞行器运动时由于碰撞导致飞行器坠毁,且在安装测控摄像头的时候也是通过电动进行转移方向,但这样的调节方式需要的成本过高,不便普及,同时在飞行器降落的时候一般都是直接通过降落杆进行防护,但是仅靠降落杆的一重缓冲防护,对飞行的保护力度是不够的。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了人工智能低空飞行器,具备提高飞行器降落保护力度和便捷调节测控摄像头角度的优点,解决了上述背景技术中提到的传统低空飞行器降落缓冲防护力度不够和测控摄像头不便调节的问题。
(二)技术方案
为实现上述目的,本发明提供如下技术方案:人工智能低空飞行器,包括飞行器,所述飞行器的底部设置有降落防护机构,且所述飞行器的顶部设置有测控调节机构;
所述降落防护机构包括转动连接于飞行器底部的降落杆,且所述降落杆的外表面固定连接有缓冲限位杆,且所述降落杆的顶部滑动连接有缓冲杆,所述缓冲杆的顶部活动连接有缓冲气缸,所述降落杆的内侧固定连接有连接杆,且所述连接杆远离降落杆的一侧滑动连接有缓冲防护板;
所述测控调节机构包括活动连接于飞行器顶部的测控摄像头,且所述测控摄像头的外表面滑动连接有测控固定护具,且所述测控固定护具的内部滑动连接有方向固定块,所述测控摄像头的底部固定连接有配重块,且所述方向固定块的外侧活动连接有伸缩控制电机。
优选的,所述缓冲防护板的顶部固定连接有缓冲弹簧,且所述缓冲弹簧的顶部与飞行器的底部固定连接,所述缓冲防护板的内部开设有摄像孔。
优选的,所述飞行器的内部设置有智能控制模块,且智能控制模块包括测距模块、测速模块和提醒模块。
优选的,所述飞行器的底部设置有摄像头二,且所述摄像头二的大小与摄像孔的内径相适配。
优选的,所述缓冲弹簧的数量为四个,且四个所述缓冲弹簧位于缓冲防护板四角的顶部。
优选的,所述测控固定护具的顶部开设有测控孔,且所述测控固定护具固定连接于飞行器的顶部。
人工智能低空飞行器的降落防护机构,包括转动连接于飞行器底部的降落杆,且所述降落杆的外表面固定连接有缓冲限位杆,且所述降落杆的顶部滑动连接有缓冲杆,所述缓冲杆的顶部活动连接有缓冲气缸,所述降落杆的内侧固定连接有连接杆,且所述连接杆远离降落杆的一侧滑动连接有缓冲防护板。
人工智能低空飞行器的测控调节机构,包括活动连接于飞行器顶部的测控摄像头,且所述测控摄像头的外表面滑动连接有测控固定护具,且所述测控固定护具的内部滑动连接有方向固定块,所述测控摄像头的底部固定连接有配重块,且所述方向固定块的外侧活动连接有伸缩控制电机。
与现有技术相比,本发明提供了人工智能低空飞行器,具备以下有益效果:
1、该人工智能低空飞行器,通过设置有降落杆、缓冲限位杆和缓冲杆等装置相互配合,具体为降落杆的顶部通过缓冲杆可以在飞行器降落的时候,通过缓冲气缸的内的气体进行缓冲,同时在降落杆的外表面固定连接有缓冲限位杆可以对缓冲杆进行限位,避免下降力度过大,辅助缓冲杆对飞行器本体进行保护,同时在飞行器降落的时候,通过降落杆向着飞行器外侧延伸,从而将连接杆从缓冲防护板内滑出,进而通过缓冲防护板顶部固定连接的缓冲弹簧对飞行器进行进一步的缓冲,从而通过三重缓冲对飞行器降落进行保护,达到加大保护飞行器力度的效果,解决了上述背景技术中提到的飞行器降落的时候没有对底盘设置有专门的保护装置的问题。
2、该人工智能低空飞行器,通过设置有测控固定护具、方向固定块和配重块等装置相互配合,具体为测控固定护具的内壁与测控摄像头的外表面滑动连接,且在测控固定护具的内部滑动连接有半圆形配重块,在半圆形配重块的内部开设有插接槽,可以与方向固定块进行插接对其自身进行固定,在飞行器向着某个方向进行移动时,就会使得配重块由于惯性进行移动,从而可以调节测控摄像头的方向,使得其测控方向保持与飞行器飞行方向一致,同时在配重块移动后会通过打开控制方向固定块伸缩的伸缩控制电机,将配重块的方向进行固定,接着在飞行器转换角度时,将方向固定块进行缩回,等待配重块调整好,达到便捷调节测控摄像头的效果。
附图说明
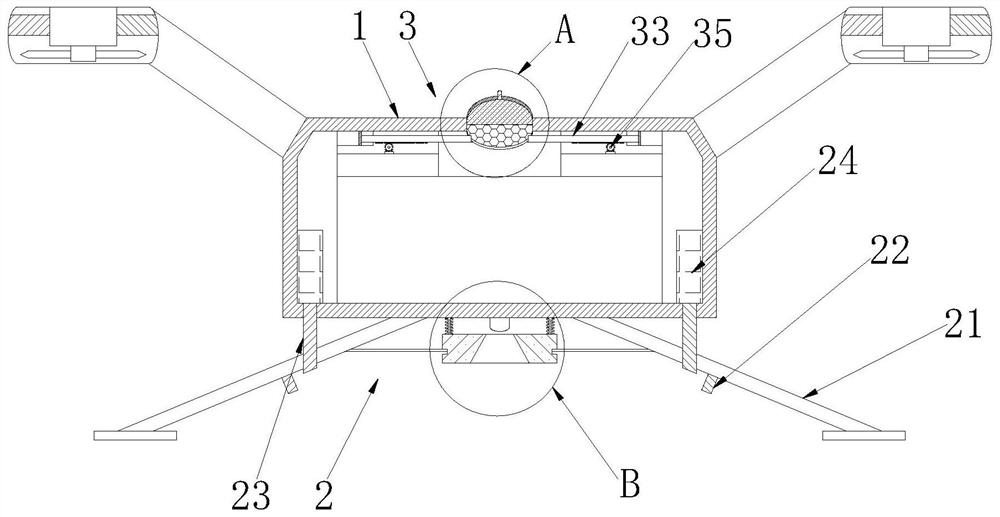
图1为本发明结构正面剖视图;
图2为图1中A处结构放大图;
图3为图1中B处结构放大图;
图4为本发明测控固定护具俯视图。
其中:1、飞行器;11、摄像头二;2、降落防护机构;21、降落杆;22、缓冲限位杆;23、缓冲杆;24、缓冲气缸;25、连接杆;26、缓冲防护板;27、缓冲弹簧;3、测控调节机构;31、测控摄像头;32、测控固定护具;33、方向固定块;34、配重块;35、伸缩控制电机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
本实施例是人工智能低空飞行器的实施例。
请参阅图1-4,人工智能低空飞行器,包括飞行器1,飞行器1的底部设置有降落防护机构2,且飞行器1的顶部设置有测控调节机构3;
降落防护机构2包括转动连接于飞行器1底部的降落杆21,且降落杆21的外表面固定连接有缓冲限位杆22,且降落杆21的顶部滑动连接有缓冲杆23,缓冲杆23的顶部活动连接有缓冲气缸24,降落杆21的内侧固定连接有连接杆25,且连接杆25远离降落杆21的一侧滑动连接有缓冲防护板26;
通过上述技术方案,降落杆21的顶部通过缓冲杆23可以在飞行器1降落的时候,通过缓冲气缸24的内的气体对缓冲杆23的冲击进行缓冲,同时在降落杆21的外表面固定连接有缓冲限位杆22可以对缓冲杆23的滑动进行限位,避免下降力度过大,辅助缓冲杆23对飞行器1本体进行保护,同时在飞行器1降落的时候,通过降落杆21向着飞行器1外侧延伸,从而将连接杆25从缓冲防护板26内滑出,进而通过缓冲防护板26顶部固定连接的缓冲弹簧27对飞行器1进行进一步的缓冲保护,从而通过三重缓冲对飞行器1降落进行充分保护,达到加大保护飞行器1力度的效果。
测控调节机构3包括活动连接于飞行器1顶部的测控摄像头31,且测控摄像头31的外表面滑动连接有测控固定护具32,且测控固定护具32的内部滑动连接有方向固定块33,测控摄像头31的底部固定连接有配重块34,且方向固定块33的外侧活动连接有伸缩控制电机35。
通过上述技术方案,测控固定护具32的内壁与测控摄像头31的外表面滑动连接,且在测控固定护具32的内部滑动连接有半圆形配重块34,在半圆形配重块34的内部开设有插接槽,可以与方向固定块33进行插接对其自身进行固定,在飞行器1向着某个方向进行移动时,就会使得配重块34由于惯性进行反方向移动,从而可以调节测控摄像头31的方向,使得其测控方向保持与飞行器1飞行方向一致,同时在配重块34移动后会通过打开控制方向固定块33伸缩的伸缩控制电机35,将配重块34的方向进行固定,接着在飞行器1转换角度时,将方向固定块33进行缩回,等待配重块34调整好,达到便捷调节测控摄像头31的效果。
具体的,缓冲防护板26的顶部固定连接有缓冲弹簧27,且缓冲弹簧27的顶部与飞行器1的底部固定连接,缓冲防护板26的内部开设有摄像孔。
通过上述技术方案,在飞行器1底部设置的摄像头不会由于缓冲防护板26的上压,导致压迫摄像头二11,进而损坏摄像头二11。
具体的,飞行器1的内部设置有智能控制模块,且智能控制模块包括测距模块、测速模块和提醒模块。
通过上述技术方案,测距模块和测速模块的信息捕捉环节设置于测控摄像头31的内部,同时在飞行器1内部设置有提醒发送模块,同时在对飞行器1控制的控制装置内进行接收提醒信号,内部智能控制模块由中央控制芯片进行控制,且智能测控方面的器具为现有装置,在这里就不作过多描述。
具体的,飞行器1的底部设置有摄像头二11,且摄像头二11的大小与摄像孔的内径相适配。
通过上述技术方案,摄像头二11可以对地面风景进行拍摄,为地面提供俯视画面。
具体的,缓冲弹簧27的数量为四个,且四个缓冲弹簧27位于缓冲防护板26四角的顶部。
通过上述技术方案,缓冲弹簧27设置于飞行器1底板摄像头二11的四周,从而可以在对缓冲防护板26进行缓冲时不会对摄像头二11碰撞,造成损伤。
具体的,测控固定护具32的顶部开设有测控孔,且测控固定护具32固定连接于飞行器1的顶部。
通过上述技术方案,测控固定护具32可以对内部的测控摄头31位置进行防护,同时为内部半圆配重块34的活动提供滑动轨道。
在使用时,飞行器1在降落到地面时,降落杆21首先落到地面,接着对缓冲杆23进行上压,同时通过降落杆21在降落的时候会带动连接杆25向外侧转动,从而从缓冲防护板26的内部脱离出来,然后通过缓冲防护板26对飞行器1底部进行缓冲,接着在下降力度过大时,可以通过缓冲限位杆22对缓冲杆23进行限位防护,完成对飞行器1降落的缓冲操作。
实施例二
本实施例是人工智能低空飞行器的降落防护机构的实施例。
人工智能低空飞行器的降落防护机构2,包括转动连接于飞行器1底部的降落杆21,且降落杆21的外表面固定连接有缓冲限位杆22,且降落杆21的顶部滑动连接有缓冲杆23,缓冲杆23的顶部活动连接有缓冲气缸24,降落杆21的内侧固定连接有连接杆25,且连接杆25远离降落杆21的一侧滑动连接有缓冲防护板26。
通过上述实施例,降落杆21的顶部通过缓冲杆23可以在飞行器1降落的时候,通过缓冲气缸24的内的气体对缓冲杆23的冲击进行缓冲,同时在降落杆21的外表面固定连接有缓冲限位杆22可以对缓冲杆23的滑动进行限位,避免下降力度过大,辅助缓冲杆23对飞行器1本体进行保护,同时在飞行器1降落的时候,通过降落杆21向着飞行器1外侧延伸,从而将连接杆25从缓冲防护板26内滑出,进而通过缓冲防护板26顶部固定连接的缓冲弹簧27对飞行器1进行进一步的缓冲保护,从而通过三重缓冲对飞行器1降落进行充分保护,达到加大保护飞行器1力度的效果。
实施例三
本实施例是人工智能低空飞行器的测控调节机构的实施例。
人工智能低空飞行器的测控调节机构3,包括活动连接于飞行器1顶部的测控摄像头31,且测控摄像头31的外表面滑动连接有测控固定护具32,且测控固定护具32的内部滑动连接有方向固定块33,测控摄像头31的底部固定连接有配重块34,且方向固定块33的外侧活动连接有伸缩控制电机35。
通过上述实施例,测控固定护具32的内壁与测控摄像头31的外表面滑动连接,且在测控固定护具32的内部滑动连接有半圆形配重块34,在半圆形配重块34的内部开设有插接槽,可以与方向固定块33进行插接对其自身进行固定,在飞行器1向着某个方向进行移动时,就会使得配重块34由于惯性进行反方向移动,从而可以调节测控摄像头31的方向,使得其测控方向保持与飞行器1飞行方向一致,同时在配重块34移动后会通过打开控制方向固定块33伸缩的伸缩控制电机35,将配重块34的方向进行固定,接着在飞行器1转换角度时,将方向固定块33进行缩回,等待配重块34调整好,达到便捷调节测控摄像头31的效果。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 人工智能低空飞行器
- 一种中低空飞行器驱动装置、驱动方法及中低空飞行器