一种基于车与车RFID通信的泊车路段防碰撞预警方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明属于车辆防碰撞系统技术领域,特别针对路边泊车路段车辆起步上道和车门开启时这两种情况进行预警,并辅助驾驶员完成避障操作的一种驾驶辅助系统。
背景技术
如今,随着科技和经济水平的快速发展,汽车的保有量不断增加,与之而来的交通事故也在成倍地增长。汽车碰撞作为最主要的交通事故形式,占城市道路交通事故总量的90%左右,远超因碾压、翻车和其他类型原因造成的道路交通事故的总和,威胁着驾乘人员、行人的生命安全以及车辆、道路设施财产安全。因此,对于防碰撞预警系统等主动安全技术的研究具有十分重要的意义。
现阶段汽车智能驾驶辅助系统(ADAS)可通过安装在汽车前部的广角摄像头(如特斯拉Model3)或角雷达(如蔚来ES6)对前方道路进行扫描,通过包括自适应巡航(ACC)功能在内的智能驾驶辅助系统控制单元通过控制汽车的线控液压制动系统(EHB)和主动前轮转向系统(AFS)的协调动作,改变汽车行驶速度和行驶轨迹,以使本车辆与前方车辆或障碍物始终保持安全距离、避免发生碰撞。随着智能驾驶辅助系统的成熟和在车辆上大规模普及应用,现阶段汽车已经基本实现L3级的有条件自动驾驶功能,汽车的智能化程度越来越高。
尽管智能驾驶辅助系统愈加成熟完善,但是现阶段依然频繁发生无法有效感知障碍导致汽车碰撞事故的发生。通过调研发现,现有市场上主流的具备主动防碰撞功能的L2级自动驾驶汽车针对前车部分车身驶入本车道或路边障碍物有侵占本车道的工况发生时,其感知准确度以及防碰撞效果并不理想,出现的安全事故频发。故基于单车智能的防碰撞技术受其测试用例场景的千变万化的限制以及环境干扰因素众多,现阶段对于上述场景显然不能可靠完成防碰撞功能。
另外,针对防止车门突然开启导致的碰撞事故,现有其他技术也有通过对被碰撞车辆基于后方雷达或摄像头感知接近车辆等数据将车门进行锁死控制或限位操作的方式来避免碰撞的发生。例如,专利CN105196953A将小束角超声波雷达安装于后视镜部位,根据车体后方运动物体运动情况对车门进行锁死控制,以避免车门与行驶车辆碰撞,同时采用激光三角测距原理对车身两侧障碍物进行检测,并根据两侧的障碍物位置限制车门的开启位置,以避免开门时车门与障碍物发生碰撞。
除了采用自动化机构实现车门的防碰撞目的,也可对汽车侧门的开启设立防碰撞预警系统。专利号CN205468784U设计了一种汽车侧门开启防碰撞预警系统。通过超声波检测模块检测汽车周围环境,经数据处理模块对所述超声波检测模块检测到的环境信号进行处理,并判断是否启动预警。每个车门都可以安装独立的预警系统,通过指示灯和蜂鸣器双重预警进一步提高了安全性能,能有效避免车门开启碰撞事故,且预警准确性高、成本低。另外,惠州市德赛西威汽车电子股份有限公司专利号CN111002903A发明的预警系统通过预设ID库,使ID库中的每个标签ID均对应标记为车辆周边可能出现的一种事物信息。停车后,系统实时采集识别车辆周边的信息,并匹配ID库。若识别到的信息与ID库中的标签ID相匹配,根据标签ID的种类发出相应预警处理。该系统采用RFID技术对人和物品进行识别,识别准确性高、范围广、响应速度快,有效解决了驻车开门碰撞的问题。
综合上述国内外研究可以发现,现有智能驾驶辅助系统的防碰撞预警都是基于车载视觉和雷达感知技术或智能车门开启限位控制技术的单车智能防碰撞预警,而基于未来5G网络车与车通信技术的防碰撞技术鉴于目前智能交通系统尚未成型,技术应用尚不成熟。此外,专门针对城市道路路侧泊车有起步上道或突然车门开启影响正常驾驶汽车交通安全场景的防碰撞预警措施并未涉及。
本发明采用低成本无线射频(RFID)技术,针对泊车路段上可能发生的碰撞事故问题提供一套解决系统。RFID的发展经历了理论阶段、探索阶段,目前已处于应用相对成熟阶段。射频识别技术在交通、物流、医疗保健等众多领域有着广泛的应用。而且现在鉴于我国实施高速收费站自主化服务技术升级要求,现在车辆基本全部具备基于RFID技术的电子收费系统(ETC)。因此采用RFID技术实现路边泊车路段起步上道和车门开启防碰撞预警,不仅可以不增加额外成本,且利用该车与车通信技术可以有效降低雷达、摄像头等感知设备受环境影响和测试用例不足导致软件缺陷、探测距离、准确度等方面的问题,有效避免碰撞发生的同时,提高狭窄道路行车驾驶人安全信心和通行效率。
发明内容
本发明提供基于车与车RFID通信的泊车路段防碰撞预警方法,针对路边泊车路段面对停泊车辆起步或车门开启时能有效对行驶车辆实施预防碰撞预警,对车辆驾驶员做出相应预警及相应驾驶辅助,避免碰撞事故的发生。
该系统通过停泊车辆相应传感器以及无线射频(RFID)车与车通信技术,传递相关停泊车辆运动信息,行驶车辆获取上述信息后经控制器处理判定碰撞可能,并对行驶车辆驾驶员做出相应预警及相应驾驶辅助,避免碰撞事故的发生。该系统优先应用于具备环境感知能力的智能驾驶辅助系统的车辆,利用RFID车与车通信技术可以大幅提高具有路边停泊车位的城市道路通行效率和行车安全;但此技术同样适用于只具备RFID无线通信技术的传统车辆,利用RFID车与车通信技术可以相对保守地避免传统车辆在此类路段碰撞事故的发生。
为描述简便,以下将“道路行驶车辆”简称为A车,不同的道路行驶车辆用A1、A2等表示;“泊车路段停泊车辆”简称B车,不同的停泊车辆用B1、B2等表示。
有益效果
1.本发明采用较为成熟且低廉的射频识别技术RFID进行车与车之间信息传递,实现了无接触的车与车通信;RFID系统的读写速度极快,保证了预警的及时性,且RFID系统结构简单,价格低廉,适用性较广。
2.本发明一方面可以对路边停泊车辆有起步并线或开启车门动作时对其运动轨迹进行模拟计算,从而通过主动刹车或主动变道有效辅助驾驶员避免碰撞和对驾驶员提供安全预警;另一方面还可以在系统鉴别到路边停泊车辆为完全静止车辆时提醒行车驾驶员保持车速正常行驶,从而提高驾驶信心和通行效率,针对性较强。
附图说明
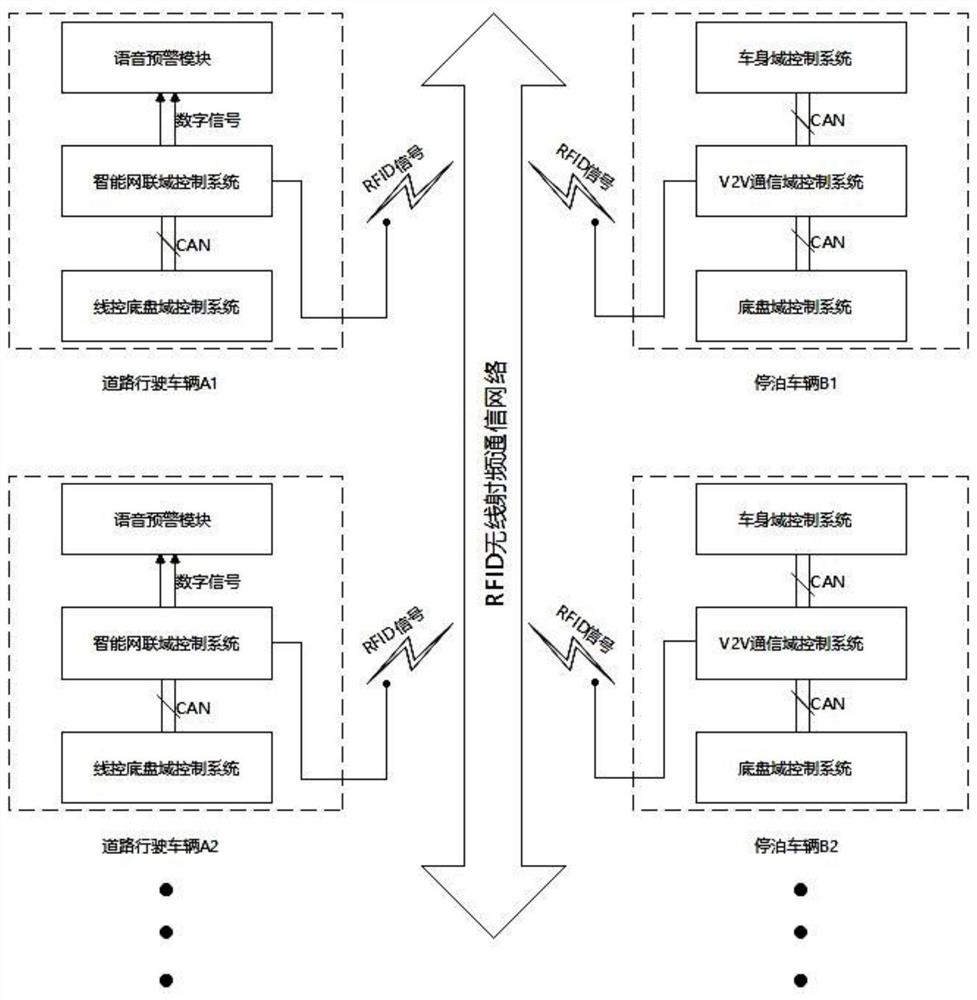
图1为本发明所述的一种基于车与车RFID通信的泊车路段防碰撞预警方法的系统组成框图。
图2为本发明所述的一种基于车与车RFID通信的泊车路段防碰撞预警方法布置在A车上的系统电气原理组成框图。
图3为本发明所述的一种基于车与车RFID通信的泊车路段防碰撞预警方法布置在B车上的系统电气原理组成框图。
图4为本发明所述的一种基于车与车RFID通信的泊车路段防碰撞预警方法的系统在A车上各部件布置位置图。
图5为本发明所述的一种基于车与车RFID通信的泊车路段防碰撞预警方法的系统在B车上各部件布置位置图。
图6为A车系统中V2V通信控制器存储的信息发送控制子程序流程图。
图7为A车系统中V2V通信控制器存储的信息接受控制子程序流程图。
图8为B车系统中V2V通信控制器存储的发送转向动作控制程序流程图。
图9为B车系统中V2V通信控制器存储的发送开门动作控制程序流程图。
图10为本发明所述的一种基于车与车RFID通信的泊车路段防碰撞预警方法工作场景图1。
图11为本发明所述的一种基于车与车RFID通信的泊车路段防碰撞预警方法工作场景图2。
图12为本发明所述的一种基于车与车RFID通信的泊车路段防碰撞预警方法工作场景图3。
具体实施方式
如图1所示,本发明所示的一种基于车与车RFID通信的泊车路段防碰撞预警系统分别布置于道路行驶车辆A车(A
从系统配置的便利性考虑,作为实施例,本发明所述基于车与车RFID通信的泊车路段防碰撞预警系统在A车和B车上具有相同的全部的硬件配置及软件控制流程,但在为了说明描述的简便性,根据工作场景中各自发挥效应的硬件装置不同。从描述的简略性和清楚性出发,则作为一种优选实施例,本发明所述基于车与车RFID通信的泊车路段防碰撞预警系统在A车和B车上则具有如图1所示的不同的最小系统硬件配置。如图1所示,道路行驶车辆A上主要包含语音预警模块、智能网联域控制系统和线控底盘域控制系统,其中智能网联域控制系统和线控底盘域控制系统之间通过CAN线传递和交换信息,并向语音预警模块发送数字信号;后者上面包含车身域控制系统、V2V通信域控制系统和底盘域控制系统,三者之间也通过CAN线传递和交换信息。单车与单车之间通过发出带有地址的RFID信号并借助RFID无线射频通信网络从而完成车与车之间的交流和通信。
具体来说,如图1和图2所示,A车上的一种基于车与车RFID通信的泊车路段防碰撞预警系统及方法中所述的线控底盘域控制系统具体主要包括A车车速传感器、主动前轮转向系统(AFS)和自动紧急制动系统(AEB);所述的智能网联域控制系统具体主要包括毫米波雷达、前置摄像头、A车V2V通信控制器和A车RFID模块;所述的语音预警模块具体包括碰撞预警灯和语音扬声器。如图2所示,V2V通信控制器与底盘域控制器通过CAN总线相连,后者与A车的自动紧急制动系统(AEB)和主动前轮转向系统(AFS)之间通过传递数字信号进而控制两个底盘子系统的工作运行,同时A车车速传感器也与其通过信号线相连接,并向其传递A车车速数据信息;V2V通信控制器与毫米波雷达、前置摄像头经数据线相连接,分别接收两个感知设备获取的汽车前方道路障碍物距离信息和环境画面信息。除此之外,V2V通信控制器还控制着RFID模块启动信号的发射与接收,并通过传递数字信号控制语音预警模块的工作。
如图1和图3所示,B车上的一种基于车与车RFID通信的泊车路段防碰撞预警系统及方法中所述的底盘域控制系统具体主要包括底盘域控制器、B车车速传感器和方向盘转角传感器;所述的V2V通信域控制系统具体主要包括B车V2V通信控制器和B车RFID模块;所述的车身域控制系统具体主要包括车身域控制器、前门开启角度传感器和后门开启角度传感器。如图3所示,底盘域控制器、车身域控制器和V2V通信控制器三者之间由CAN线相连。其中底盘域控制器通过信号线连接着方向盘转角传感器和车速传感器,两者分别将获得的转角数据信息和B车车速信息传至底盘域控制器中;车身域控制器通过信号线与前或后门开启角度传感器相连,两者分别向其传递前或后门开启角度数据信息;V2V通信控制器与RFID模块经数字信号线相接,控制无线射频信号的发射与接收。
如图4布置位置图所示,A车上主要由毫米波雷达11、A车车速传感器12、前置摄像头13、主动前轮转向系统(AFS)14、A车V2V通信控制器15、A车RFID模块16、语音预警模块17、自动紧急制动系统(AEB)18组成。作为一种优选,其中:毫米波雷达11布置于汽车的前进气格栅中间位置;A车车速传感器12布置于汽车各个车轮附近;前置摄像头13布置在汽车风挡玻璃内侧上缘的车内后视镜背面;主动前轮转向系统(AFS)14为控制转向车轮主动实现偏转的底盘子系统,其核心执行器布置在方向盘转向轴上;A车V2V通信控制器15位于仪表台内;A车RFID模块16布置在汽车前挡风玻璃内侧靠上位置;语音预警模块17布置在汽车操控面板处。
如图5布置位置图所示在B车主要由B车车速传感器21、方向盘转角传感器22、B车V2V通信控制器23、前门开启角度传感器24、后门开启角度传感器25、B车RFID模块26组成。作为一种优选,其中:方向盘转角传感器22布置在方向盘转向柱上;前门开启角度传感器24和后门开启角度传感器25分别布置在汽车的前、后车门内;B车车速传感器21、B车V2V通信控制器23布置和B车RFID模块26与A车的布置方式相同。
如图6所示,A车系统中V2V通信控制器中存储有行驶车辆A实时监测行驶路段和环境是否进入泊车路段并发送通信需求的控制子程序,程序具体执行步骤如下:
步骤一:开始,毫米波雷达进行测距,前置摄像头捕捉道路画面信息,然后将距离信息和画面信息传至A车V2V通信控制器15内;
步骤二:控制器判断是否同时满足如下3个必要条件:
1.已行驶到泊车路段;
2.监测到有停泊车辆;
3.本车正于慢车道行驶。
以上3条必要条件,可依据现有自动驾驶技术,通过自动驾驶车辆的前置摄像头进行路况画面捕捉,然后将图像信息传至A车V2V通讯控制器15中进行处理。若画面结果显示同时满足上述路况条件,则转入步骤三;若不满足上述条件,则返回步骤一,继续读取通过摄像头和毫米波雷达监测的环境和行驶道路信息。具体基于摄像头的路况信息获知方法为现有技术,不再赘述。
步骤三:触发启动A车RFID模块16,并向周围路边停泊车辆B车发送带有地址的请求RFID通信的触发信号。
如图7所示,A车系统中V2V通信控制器15中存储有行驶车辆A实时读取通过RFID车与车通信获得的泊车路段停泊车辆专属发送的车轮转动角度信息或车门开启信息的控制子程序,程序具体执行步骤如下:
步骤一:通过A车RFID模块16读取B车经无线通信发送至A车的B车的状态信息。B车的状态信息包括前轮转角信息δ
步骤二:通过CAN总线从A车底盘域控制器读取的A车车速信号V
步骤三:根据读取到的是B车前轮转角信息还是车门开启状态信号判定是何种潜在碰撞风险场景。如果获取的是前轮转角信息,则说明停泊车辆有起步并线上道的趋势,则跳转至步骤四;如果获取的是车门开启角度信号,则说明停泊车辆虽然静态停泊,但有车门开启占用车道趋势,则跳转至步骤五。
步骤四:根据读取到的B车的状态信息和本车底盘车速信息,按照下述计算公式判定本车预期前方行驶轨迹是否有与停泊车辆起步并线上道行驶轨迹有重合导致发生碰撞的风险,
式中,前两项之差为将A车和B车当作质点时B车的横向位移。第一项中,
步骤五:根据读取到的B车车门开启角度信号,按照下述计算公式判定本车预期前方行驶轨迹是否有与停泊车辆完全开启车门后占用道路有重合导致发生碰撞的风险:
式中,S
步骤六:由于现有自动驾驶汽车普遍具有自动驾驶模式启动按键,当驾驶员启动自动驾驶后,汽车将启动自动驾驶功能。为此,对于气动自动驾驶功能行驶的A车辆,启动A车语音预警模块,只需控制仪表盘中碰撞预警灯闪烁即可,提示驾驶员车辆已驶入路边有停泊车辆路段;而当未启动自动驾驶功能,即对于正在由驾驶员驾驶的A车辆,启动A车语音预警模块,其中控制仪表盘中碰撞预警灯闪烁提醒驾驶员已行至路边有停泊车辆路段,并且控制语音扬声器播放“路边有车辆,请适当留意、正常行驶”的语音提示驾驶员只需留意路边停泊车辆,正常行驶即可,以避免驾驶员行至此路段导致的精神紧张,尽量保持车速以提高该路段通行效率。
步骤七:对于启动自动驾驶功能行驶的A车辆,启动A车语音预警模块,并只控制仪表盘中碰撞预警灯闪烁即可,提示驾驶员车辆已驶入路边有停泊车辆路段。同时,通过A车底盘域控制器控制自动紧急制动系统AEB和主动转向系统AFS根据感知的环境状况,协调决策完成自动紧急刹车或自动紧急避障变线的车辆运动,以避让B车起步上道或车门开启导致碰撞危险。而当未启动自动驾驶功能,对于驾驶员驾驶的A车辆,控制语音扬声器播放“路边车辆有侵入车道风险,请减速缓行或避让行驶”的语音提示,提醒驾驶员注意路边停泊车辆动作,并操纵车辆减速或变道行驶以避免发生碰撞。
如图8所示,B车系统中V2V通信控制器23存储有发送本车转向动作的控制程序,其具体实施步骤如下:
步骤一:开始,方向盘转角传感器和B车车速传感器21分别获得B车的方向盘转角θ
步骤二:底盘域控制器通过式(3)处理得到B车的前轮转角信息δ
式中,i
步骤三:B车V2V通信控制器23判断是否检测到有来自A车的RFID信号刺激,若没有则跳至步骤一,继续监测当下的方向盘转角信息和B车车速信息;若有,则继续进行步骤四;
步骤四:B车的V2V通信控制器23控制B车的RFID模块26向A车发射携带B车的上述前轮转角信息δ
如图9所示,B车系统中V2V通信控制器23存储有发送本车车门开门状态的控制程序,其具体实施步骤如下:
步骤一:开始,安装在前、后车门内的前或后门开启角度传感器分别检测各自的车门开启角度信息,前门的开启角度为θ
步骤二:B车V2V通信控制器23判断是否检测到有来自A车的RFID信号刺激。若有,则继续进行步骤三;若没有则返回步骤一,继续监测当下车门开启角度信息;
步骤三:B车的V2V通信控制器23控制B车RFID模块26向A车发射携带B车状态且带有地址的无线射频信号。
对照图10、图11、图12所示,本发明所述的一种基于RFID车与车通信的路边泊车路段防碰撞预警方法在三种典型工作场景下的工作原理如下:
如图10所示为第一种工作场景:慢车道上一辆车A
A
运用上述已知数据建立预警机制模型如下:在安全情况下,应满足在两车运动到轨迹相互重合的临界位置时B
在本场景中,判据应为:S
如图11所示为第二种工作场景:慢车道上一辆车A
首先A
运用上述已知数据建立的预警模型与第一种工作场景类似,都是先利用已知数据计算得到各自情况下的S
这里指出,本工作场景境况下的判据可推广到泊车路段有n辆起步车辆的情况,这是只需将判据改为:{S
如图12所示为第三种工作场景:慢车道上一辆车A
A
运用上述已知数据建立预警机制模型如下:在安全情况下,应满足两车的横向距离大于B
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
- 一种基于车与车RFID通信的泊车路段防碰撞预警方法
- 一种基于车与车RFID通信的泊车路段防碰撞预警方法