一种视频差分方法及适用于干煤棚内的斗轮机防护系统
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及干煤棚内的斗轮堆取料机智能防护领域,特别是指一种适用于干煤棚内的斗轮机防护系统。
背景技术
斗轮机又叫斗轮堆取料机,具有堆料和取料功能,是一种高效率连续装卸散料的大型机械设备。堆取料机广泛应用于大型散货港口、火力发电厂的储煤场、大型土方工程工地或大型钢铁厂的矿石煤炭原料场、大型水泥厂等地;通过斗轮机进行挖取堆放煤炭、沙石或焦炭等物料。堆取料机是由斗轮挖掘机演变而来的,可与卸车机、皮带输送机等组成储料场运输机械化系统,因其作业效率高,所以成为现代化工业大宗散状物料连续装卸的高效设备,并得到广泛应用。
实际应用的过程中,斗轮机都是单台布置在一条轨道上操作运行的,但有时受地理环境限制,或为了合理高效地实现配煤,会在同一条轨道上布置两台或多台斗轮机进行作业;而这样做会存在如下问题:
斗轮机在行走过程中,多个斗轮机之间的大臂可能会发生碰撞;或大臂会与其他障碍物发生碰撞;如在夜间工作时,受照明及视线限制,斗轮机车体与障碍物或行人会发生碰撞;
现有技术中,斗轮机防碰撞方法大多需要结合斗轮机的行走数据和回转数据,而这些数据是通过编码器来获得的,但是由于堆取料机料场举例较长、轨道不平且粉尘较多等原因,一旦出现行走轮打滑现象,编码器数据就会出现不准确情况,在长时间运行中编码器存在误差积累,使数据出现偏差,导致系统出现错误判断;
另一种方式是在斗轮机大臂上安装激光雷达等设备来检测周围是否有障碍物,以避免与障碍物发生碰撞,然而因料场地面不平、粉尘较大、大雾与光照等诸多恶劣气候均会对激光雷达发射的信号产生影响,故使得测量结果存在一定偏差;虽然在干煤棚外可以设置差分GPS定位来提高精度,但是在干煤棚内不易接收信号,造成定位效果降低,另外通过定位的方式整体成本也会增高。
因此,一种能够定位精度高且成本合理的斗轮机防撞系统迫切需要。
发明内容
本发明提出一种视频差分方法及适用于干煤棚内的斗轮机防护系统,解决了上述现有技术中的问题。
本发明的技术方案是这样实现的:
一种视频差分方法,包括:
S1、使用三帧视频序列的灰度图像进行差分;
S2、对差分后的其中两帧进行分割,得到两幅二值化图像,并对得到的两个二值化图像进行处理;
S3、提取两幅图像中前景图像的交集,得到提取的共同部分。
作为进一步的技术方案,所述S1步骤包括:
使用三帧视频序列的灰度图像,以中间一帧为背景帧,将相邻两帧的灰度图像分别与背景帧图像进行差分。
作为进一步的技术方案,所述S2步骤包括:
对差分后的其中两帧进行分割,得到两幅二值化图像,并对得到的两个二值化图像进行逻辑与运算。
作为进一步的技术方案,所述S3步骤包括:
提取两幅图像中前景图像的交集,得到两次目标轮廓提取的共同部分。
本发明还提出了一种适用于干煤棚内的斗轮机防护系统,包括:
用于获取斗轮机大臂所处环境情况的第一采集装置,设置在斗轮机大臂上;
用于获取斗轮机所在轨道上移动方向上的环境情况的第二采集装置,设置在斗轮机车体的一端和/或另一端;
用于使用视频差分方法处理第一采集装置和第二采集装置采集的视频的处理单元,分别与第一采集装置和第二采集装置连接;
显示装置,设置在斗轮机操作室内,并与处理单元连接。
作为进一步的技术方案,还包括:
报警装置,设置在斗轮机上,并与处理单元连接。
作为进一步的技术方案,第一采集装置包括:
安装杆,一端设置在斗轮机大臂上;
第一摄像装置,设置在安装杆的另一端,且第一摄像装置与安装杆活动连接,且第一摄像装置能够在安装杆的一端调整角度。
作为进一步的技术方案,第二采集装置包括:
连接架,设置在斗轮机车体的一端和/或另一端;
第二摄像装置,设置在连接架一端,并与处理单元连接;
若干测距装置,设置在连接架的另一端,并与处理单元连接。
作为进一步的技术方案,连接架包括:
横杆,设置在斗轮机的一端和/或另一端;
第一竖杆和第二竖杆,垂直设置在横杆两端;
第三竖杆,设置在横杆的中线点,且与第一竖杆和第二竖杆相对设置。
作为进一步的技术方案,若干测距装置为两个,两个测距装置分别设置在第一竖杆和第二竖杆的一端;第二摄像装置设置在第三竖杆的一端。
本发明技术方案通过第一采集装置和第二采集装置同时运行获取斗轮机大臂及斗轮机车体情况,具体的通过视频差分方法提取斗轮机大臂及斗轮机车体情况,并将获取的情况经处理单元处理后反馈至显示单元,通过显示单元显示斗轮机大臂和斗轮机车体的情况,进而获取斗轮机实际工作的情况,不受环境限制,能够更为精准的获取斗轮机实际的工作情况,避免危险发生;
具体的,通过第一采集装置和第二采集装置的配合,通过视频差分方法提取斗轮机大臂及斗轮机车体情况克服了大雾、粉尘等恶劣气候所产生的影响及地面不平等地理因素所产生的测量误差;与传统编码器防撞装置相比,克服了因斗轮机行走轮打滑而输出的行走数据或回转数据测量不准确现象;与差分GPS防护装置相比,解决了干煤棚内无法定位的情况,而且便于操作与使用;此外,触摸显示屏也可以直接看到发出警报的实时影像,便于观察处理。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
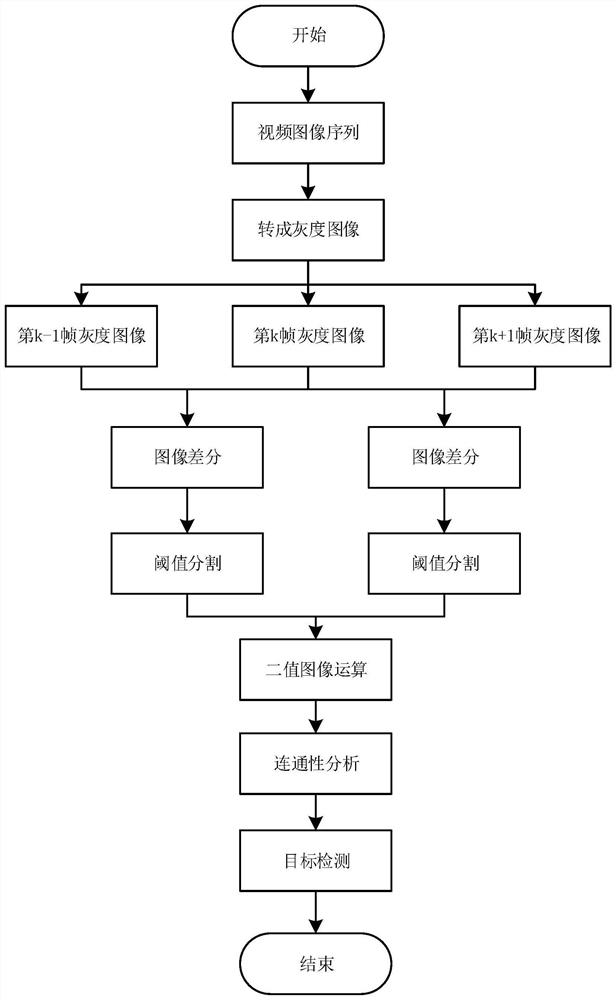
图1为本发明中一种视频差分方法的流程图;
图2为本发明一种适用于干煤棚内的斗轮机防护系统中第一采集装置的结构示意图;
图3为本发明一种适用于干煤棚内的斗轮机防护系统中第二采集装置的结构示意图;
图4为本发明中处理单元的连接关系框图。
图中:
1-第一采集装置;11-安装杆;12-第一摄像装置;2-第二采集装置;21-连接架;22-第二摄像装置;23-测距装置;3-斗轮机大臂;4-斗轮机车体。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,本发明提出了一种视频差分方法,包括:
第一步:使用三帧视频序列的灰度图像进行差分;具体的,使用三帧视频序列的灰度图像,以中间一帧为背景帧,将相邻两帧的灰度图像分别与背景帧图像进行差分。
第二步:对差分后的其中两帧进行分割,得到两幅二值化图像,并对得到的两个二值化图像进行处理;具体的,对差分后的其中两帧进行分割,得到两幅二值化图像,并对得到的两个二值化图像进行逻辑与运算。
第三步:提取两幅图像中前景图像的交集,得到提取的共同部分。具体的,提取两幅图像中前景图像的交集,得到两次目标轮廓提取的共同部分。
为更好的说明,特举例说明:
设k+1时刻视频序列的当前帧图像的灰度图为f
分别设置两个阈值T1和T2分别对上述公式所对应的两幅差分图像进行阈值分割,将这两幅差分图像二值化,记差分图像D
将两幅二值化图像P
其中,
由此,根据获取的坐标点通过视频中图像情况,进而获取斗轮机大臂和斗轮机车体的情况。
如图2-4所示,本发明还提出了一种适用于干煤棚内的斗轮机防护系统,包括:
第一采集装置1设置在斗轮机大臂3上,通过第一采集装置1获取斗轮机大臂3所处环境情况;其中,第一采集装置1包括安装杆11和第一摄像装置12,该安装杆11一端设置在斗轮机大臂3上;第一摄像装置12设置在安装杆11的另一端,且第一摄像装置12与安装杆11活动连接,且第一摄像装置12能够在安装杆11的一端调整角度;根据实际的情况进行第一摄像装置12与安装杆11之间角度的调整,以使用不同的环境及斗轮机大臂3,且在调整后,使得第一摄像装置12能够拍摄到斗轮机大臂3两侧的图像;本发明中,优选的,第一摄像装置12为工业摄像机;
第二采集装置2设置在斗轮机车体4的一端和/或另一端,通过第二采集装置2获取斗轮机所在轨道上移动方向上的环境情况;实际使用时,根据需要选择安装第二采集装置2,进而能够根据需要获取斗轮机车体4周围环境情况;本发明中,优选的在第一斗轮机车体4的两端(斗轮机前端和斗轮机后端)分别设置第二采集装置2;其中,
第二采集装置2包括连接架21、第二摄像装置22和若干测距装置23,该连接架21,置在斗轮机车体4的一端和/或另一端;第二摄像装置22设置在连接架21一端,并与处理单元连接;若干测距装置23设置在连接架21的另一端,并与处理单元连接。本发明中,优选的在斗轮机车体4的前端和后端均设置有第二采集装置2,因此连接架21、第二摄像装置22和若干测距装置23均设置在斗轮机车体4的前端和后端;
如图2所示,在使用时通过第二摄像装置22获取斗轮机前端和后端的环境情况,并通过若干测距装置23获取斗轮机车体4周围环境的物体距离;且,本发明中,
连接架21包括横杆、第一竖杆、第二竖杆和第三竖杆,该横杆设置在斗轮机的一端和/或另一端;第一竖杆和第二竖杆垂直设置在横杆两端;第三竖杆设置在横杆的中线点,且与第一竖杆和第二竖杆相对设置;通过连接架21的设置,实现与斗轮机车体4的安装;另外,在本发明中,若干测距装置23为两个,两个测距装置23分别设置在第一竖杆和第二竖杆的一端;第二摄像装置22设置在第三竖杆的一端;优选的,第二摄像装置22为工业摄像机;测距装置23为毫米波雷达,且本发明中,毫米波雷达制式选用线性调频连续波;
而,为更好的进行测距装置23的保护,优选的设置有若干防护装置,该若干防护罩与若干测距装置23相邻设置;而防护装置的数量与测距装置23的数量相同,本发明中,优选的设置有两个测距装置23,同理,设置有两个防护装置;通过防护装置防止雨水或者灰尘进入到测距装置23,进而提高测距装置23的使用寿命;当然,如果必要可以在防护罩与第一竖杆或第二竖杆的连接处设置有密封圈,进一步增加防护罩的密封强度,具体的根据使用环境而定吧,本发明对此不再进一步限定;
处理单元分别与第一采集装置1和第二采集装置2连接;显示装置设置在斗轮机操作室内,并与处理单元连接;通过第一采集装置1和第二采集装置2采集视频信息后,通过处理单元进行分析后将分析结果发送至显示装置;本发明中,处理单元进行视频采集后,通过视频差分方法获取图像信息,并确定障碍物的具体情况;
当然,在本发明中,为更好的获知检测结果,便于及时处理,优选的设置有报警装置,该报警装置设置在斗轮机上,并与处理单元连接;当第一采集装置1或第二采集装置2采集到有障碍物时,会通过处理单元处理后产生报警信号,并发送至报警装置,通过报警装置进行报警,本发明中优选的报警装置为声音报警器或灯光报警器,具体的可以根据实际情况设定,本发明对此不再进一步限定。
另外,在本发明中,处理单元优选为嵌入式开发板,优选为飞凌Cortex-A9系列核心板,其处理器采用了Samsung S5P4418;主频为1.4GHz;RAM为1GB DDR3;ROM为8GB eMMC。其中存储模块包括RAM、ROM和SD卡接口,其中SD卡接口支持SD/MMC和SDIO设备;
在具体使用时,第一摄像装置12选取的镜头的焦距应为20-13毫米,视角为94-118度;且处理单元本支持3路摄像接口,与第一摄像装置12连接的接口协议为MIPI_CSI;与第二摄像装置22连接的接口为MPEG;当在斗轮机车体4前后端同时设置第二摄像装置22时,则分别设置MPEG接口进行连接,并通过由OV5640驱动;LCD接口用于连接显示装置,其中,还配置有触摸屏接口驱动,用于在显示装置为触摸屏是进行使用;当使用触摸屏时,触摸显示屏分为三个界面,分别显示斗轮机车体4两端的第二摄像装置22与斗轮机大臂3上的第一摄像装置12的实时影像;同时也可以显示测距结果;
当本发明中,采用音频报警时,音频模块用于外接警报装置,当检测到与目标物体的距离小于安全距离时,由WM8960声卡驱动进行报警;其中,网络接口由以太网驱动,路由器可采用大功率工业路由器,支持2.4和5.0GHz双频模式;测距装置23由微带贴片天线发射信号到射频模块在经过脉冲宽度调制得到相应的输出信息,该控制单元提供PWM输出,进而获取测距装置23的数据;
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种视频差分方法及适用于干煤棚内的斗轮机防护系统
- 一种适用于干煤棚内的斗轮机防护装置