一种面向室外垃圾分类的垃圾分拣机器人的定位控制方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明属于定位控制技术领域,具体涉及一种面向室外垃圾分类的垃圾分拣机器人定位控制方法。
背景技术
城市垃圾处理是一个非常重要的问题,目前国内城市垃圾处理主要采用焚烧、填埋等传统方式,这些传统处理方式不仅效率低下,而且也会对自然环境甚至人类造成危害。城市生活垃圾主要包括金属、塑料、玻璃、纸类、织物等,其中大部分相对经济价值较高,可以回收再利用,因此可以对城市生活垃圾进行分类回收处理,减少垃圾的土地占用,减少污染,提高资源的利用率。
现有的垃圾处理多通过工作人员手动进行分拣,大部分还主要依靠人工进行分拣操作,大量的人工分拣垃圾,不仅工作进展相对缓慢,同时工作人员长期在恶劣的环境中工作,会对自己的身心健康带来不利影响,且极大的耗费了人工成本,而通过分拣机器人进行垃圾的分拣还不够成熟,通过分拣机器人对垃圾进行分拣分类处理是趋势化,在一些恶劣的工作环境中用机器人代替人工是趋势化,为此我们提出一种基于垃圾分类的垃圾分拣机器人的定位控制方法。
发明内容
本发明的目的在于提供一种面向室外垃圾分类的垃圾分拣机器人定位控制方法,以解决上述背景技术中提出的现有的垃圾处理多通过工作人员手动进行分拣,大部分还主要依靠人工进行分拣操作,大量的人工分拣垃圾,不仅工作进展相对缓慢,同时工作人员长期在恶劣的环境中工作,会对自己的身心健康带来不利影响等问题。
为实现上述目的,本发明提供如下技术方案:一种面向室外垃圾分类的垃圾分拣机器人定位控制方法,包括,
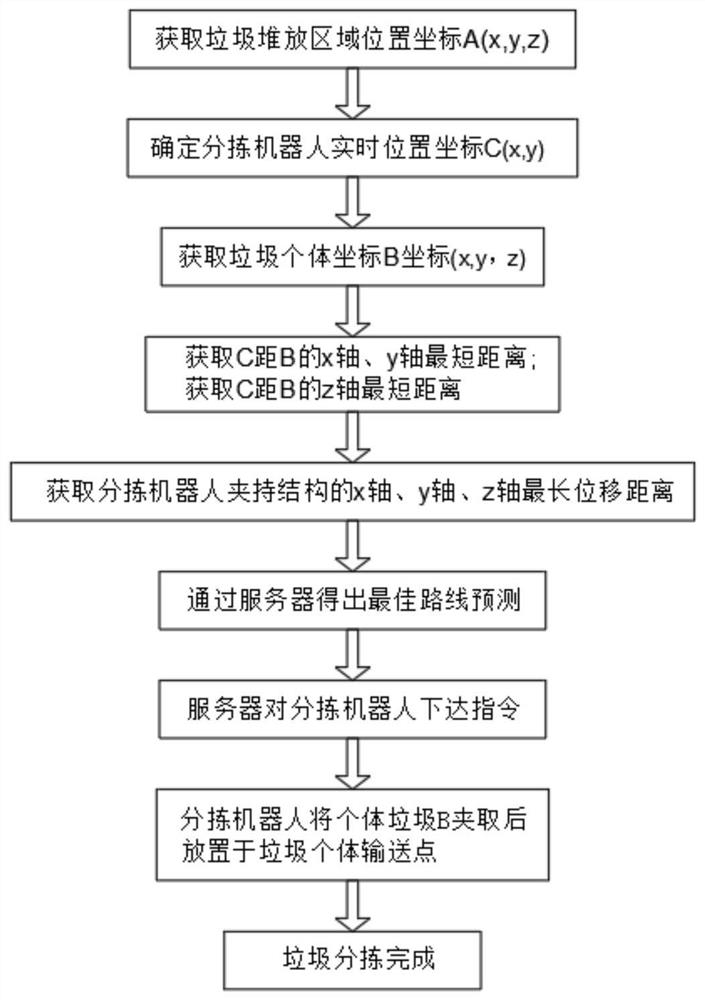
步骤一:获取垃圾堆放区域位置坐标A,将所述垃圾堆放区域位置具体至x轴,y轴,z轴上;
步骤二:分拣机器人获取垃圾堆放区域位置坐标A,并通过服务器确定分拣机器人实时位置坐标C;
步骤三:获取垃圾堆放区域中垃圾个体坐标B,通过多个摄像头对垃圾堆放区域的位置进行拍摄,通过雷达进行进行测距,确定分拣机器人与垃圾个体的x轴、y轴、z轴的距离;
步骤四:通过服务器进行最佳路线预测,服务器建立虚拟坐标框架,将A、B、C坐标输入至虚拟坐标框架中,获取C距B的x轴、y轴最短距离,且C不与A相接触,当C与B的最短距离模拟完成后,获取C距B的z轴最短距离;
步骤五:获取分拣机器人夹持结构的x轴、y轴、z轴最长位移距离,并判断分拣机器人夹持结构x轴、y轴、z轴最长位移距离是否大于C距B的z轴最短距离;
步骤六:通过服务器得出最佳路线预测,并通过服务器确定分拣机器人的夹持结构是否可以夹取垃圾个体;
步骤七:当分拣机器人的夹持结构可以夹持垃圾个体,将垃圾个体B的坐标数据、摄像头拍摄数据、分拣机器人C的实时坐标数据、最佳路线数据标红,并通过服务器对分拣机器人下达指令;
步骤八:当分拣机器人的夹持结构无法夹持垃圾个体,更换垃圾个体目标,获取垃圾堆放区域中新的垃圾个体坐标B;
步骤九:分拣机器人获取垃圾个体输送点坐标,将夹持结构获取的垃圾个体放置于垃圾个体输送点上,垃圾分拣完成。
优选的,步骤一中,垃圾堆放区域位置坐标A为多个点的集合。
优选的,所述分拣机器人设置有摄像头、红外传感器、距离传感器、WiFi模块、移动装置、CPU模块、电源模块,所述服务器将数据输送至CPU模块,并通过CPU模块对分拣机器人输出指令。
优选的,步骤四中,最佳路线位于垃圾堆放区域外部。
优选的,步骤五中,分拣机器人的夹持结构与垃圾个体B为同一平面。
优选的,步骤四中,C距B的x轴、y轴最短距离位于垃圾堆放区域外部。
优选的,步骤四中,C距B的z轴最短距离位于垃圾堆放区域正上方。
优选的,步骤五中,分拣机器人夹持结构的y轴最长位移距离大于C距B的z轴最短距离,分拣机器人可夹持垃圾个体。
优选的,步骤八中,获取垃圾堆放区域中新的垃圾个体坐标B后,从步骤二继续进行。
优选的,步骤九中,获取分拣机器人距垃圾个体输送点路线,且分拣机器人距垃圾个体输送点路线位于垃圾堆放区域外部。
与现有技术相比,本发明的有益效果是:
本方法有效的对分拣机器人进行了操作控制,通过服务器获取垃圾堆放区域与垃圾个体的坐标,接着获取分拣机器人的坐标,接着在服务器中模拟分拣机器人的最佳路线,通过在服务器率先模拟出多条路线,接着判断出最佳路线,使得分拣机器人在最节省资源的情况下,将垃圾进行夹取后移动至垃圾分拣后的区域,减少了工作人员手动分拣垃圾的情况,提高了工作人员的工作环境,同时降低了人工成本,分拣机器人分拣的效率较高,同时经济成本较低。
同时通过服务器获取坐标位置,并且获取模拟路线,不仅对垃圾的确认、夹取、输送较为准确,同时避免了局限性,使得分拣机器人可自动完成垃圾分拣工作,减少了工作人员的工作内容,且使得分拣机器人所做的指令更加准确,也更加的可以帮助到工作人员,使用更加灵活、可靠,便于推广和使用。
附图说明
图1为本发明的操作步骤示意图;
图2为本发明的流程示意图;
图3为本发明的分拣机器人内部模块示意图;
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至图3,本发明提供一种技术方案:一种面向室外垃圾分类的垃圾分拣机器人定位控制方法,包括,
步骤一:获取垃圾堆放区域位置坐标A,垃圾堆放区域位置坐标A为多个点的集合,取垃圾堆放区域类型与山坡结构,是多个垃圾个体放置的集合区域,将垃圾堆放区域位置具体至x轴,y轴,z轴上;
步骤二:分拣机器人获取垃圾堆放区域位置坐标A,并通过服务器确定分拣机器人实时位置坐标C,分级机器人会经常移动,而服务器与垃圾堆放区域为静止的;
步骤三:获取垃圾堆放区域中垃圾个体坐标B,通过多个摄像头对垃圾堆放区域的位置进行拍摄,通过雷达进行进行测距,首先通过服务器确定垃圾个体B在垃圾堆放区域的坐标,接着确定分拣机器人与垃圾个体的x轴、y轴、z轴的距离;
步骤四:通过服务器进行最佳路线预测,最佳路线位于垃圾堆放区域外部,使得分拣机器人移动时,不会与垃圾接触,使得垃圾不会影响分拣机器人的正常移动;
服务器建立虚拟坐标框架,将A、B、C坐标输入至虚拟坐标框架中,获取C距B的x轴、y轴最短距离,且C不与A相接触,当C与B的最短距离模拟完成后,获取C距B的z轴最短距离;
步骤五:获取分拣机器人夹持结构的x轴、y轴、z轴最长位移距离,并判断分拣机器人夹持结构x轴、y轴、z轴最长位移距离是否大于C距B的z轴最短距离;
步骤六:通过服务器得出最佳路线预测,并通过服务器确定分拣机器人的夹持结构是否可以夹取垃圾个体;
步骤七:当分拣机器人的夹持结构可以夹持垃圾个体,将垃圾个体B的坐标数据、摄像头拍摄数据、分拣机器人C的实时坐标数据、最佳路线数据标红,并通过服务器对分拣机器人下达指令;
步骤八:当分拣机器人的夹持结构无法夹持垃圾个体,更换垃圾个体目标,获取垃圾堆放区域中新的垃圾个体坐标B;
步骤九:分拣机器人获取垃圾个体输送点坐标,将夹持结构获取的垃圾个体放置于垃圾个体输送点上,垃圾分拣完成。
本实施例中,优选的,分拣机器人设置有摄像头、红外传感器、距离传感器、WiFi模块、移动装置、CPU模块、电源模块,服务器将数据输送至CPU模块,并通过CPU模块对分拣机器人输出指令。
本实施例中,优选的,步骤五中,分拣机器人的夹持结构与垃圾个体B为同一平面。
本实施例中,优选的,步骤四中,C距B的x轴、y轴最短距离位于垃圾堆放区域外部。
本实施例中,优选的,步骤四中,C距B的z轴最短距离位于垃圾堆放区域正上方。
本实施例中,优选的,步骤五中,分拣机器人夹持结构的y轴最长位移距离大于C距B的z轴最短距离,分拣机器人可夹持垃圾个体。
本实施例中,优选的,步骤八中,获取垃圾堆放区域中新的垃圾个体坐标B后,从步骤二继续进行。
本实施例中,优选的,步骤九中,获取分拣机器人距垃圾个体输送点路线,且分拣机器人距垃圾个体输送点路线位于垃圾堆放区域外部。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
- 一种面向室外垃圾分类的垃圾分拣机器人的定位控制方法
- 一种面向建筑垃圾的智能视觉垃圾分拣机器人