一种汽车驱动/转向控制系统
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及汽车驱动/转向技术领域,尤其涉及一种汽车驱动/转向控制系统。
背景技术
随着电动汽车产业的发展,人们对它的要求也越来越高,主要体现在安全性,可操纵性、舒适性,智能化等方向;四轮独立驱动-独立转向的电动车辆除了具有分布式驱动电动车辆较短的传动链,较高的传动效率,紧凑的结构等优点以外,其车辆的机动性和可操纵性更高,在狭窄的区间内可以实现较小的转弯半径和原地转向,未来与智能化汽车的要求兼容性更强。目前该领域已经开始吸引越来越多人的关注与研究。四轮独立驱动-独立转向电动车辆,是在每一个轮子上集成了轮毂电机(1.2)和转向电机(1.1),以纵向为0度可以实现左右各旋转90度的转角,从而可以实现前轮转向,后轮转向,四轮异向转向,楔向转向,横行以及原地转向等模式。由于单个独立驱动/转向模块需要一个轮毂电机(1.2)控制单元,一个直流转向的伺服电机控制单元,每个车需要配备4个轮毂电机(1.2)控制单元和4和转向的直流伺服电机控制单元,共计8个电机控制器,各个控制器之间通过CAN通信的方式统一通过整车控制器VCU进行调度控制。8个控制器不仅增车身的重量,同时占据了较多的布置空间,为汽车内的部件布局带来了一定的困难,同时较复杂的CAN网络也使的整车控制以及数据监控较为繁琐。
发明内容
针对上述所显示出来的问题,本发明提供了一种汽车驱动/转向控制系统用以解决背景技术中提到的8个控制器不仅增车身的重量,同时占据了较多的布置空间,为汽车内的部件布局带来了一定的困难,同时较复杂的CAN网络也使的整车控制以及数据监控较为繁琐的问题。
一种汽车驱动/转向控制系统,该系统包括:
驱动/转向一体模块,用于对汽车进行驱动或者转向操作;
四合一控制模块,与所述驱动/转向一体模块连接,用于控制所述驱动/转向一体模块对汽车进行驱动或者转向操作;
蓄电池,与所述四合一控制模块连接,用于向所述四合一控制模块提供第一预设电压范围的电能;
铅酸电池,与所述四合一控制模块连接,用于向所述四合一控制模块提供第二预设电压范围的电能。
优选的,所述驱动/转向一体模块,包括:
转向电机,用于控制汽车轮胎进行转向;
轮毂电机,用于控制汽车轮胎进行驱动。
优选的,所述四合一控制模块,包括:
电容,一端通过直流母线接口与蓄电池连接,另一端与变压器连接,用于储能与滤波,以保证系统安全;
所述变压器,另一端与转向电机控制子模块连接,用于调节所述四合一控制模块的输出电压;
所述转向电机控制子模块,通过直流/交流输出接口与所述驱动/转向一体模块连接,用于生成转向指令并根据所述转向指令控制所述驱动/转向一体模块进行转向操作;
驱动电机控制子模块,一端与所述电容连接,另一端通过三项输出接口与所述驱动/转向一体模块连接,用于生成驱动指令并根据所述驱动指令控制所述驱动/转向一体模块进行驱动操作。
优选的,所述直流/交流输出接口包括第一直流/交流输出接口和第二直流/交流输出接口,所述三项输出接口包括第一三项输出接口和第二三项输出接口。
优选的,所述系统还包括,制冷模块,与所述四合一控制模块连接,用于对所述四合一控制模块进行降温;
所述制冷模块,包括:
温度检测子模块,用于检测所述四合一控制模块所在预设范围内的第一温度和汽车内部的第二温度;
第一处理子模块,与所述温度检测子模块连接,用于根据所述第一温度和第二温度判断所述四合一控制模块的工作温度是否超标,若是,生成制冷指令,否则,无需进行后续操作;
制冷子模块,与所述第一处理子模块连接,用于根据所述制冷指令将汽车内部的空气进行制冷以实现对所述四合一控制模块的降温。
优选的,所述系统还包括,校正模块,一端与所述汽车的车载传感器连接,另一端与所述四合一控制模块连接,用于校正所述四合一控制模块的转向指令或驱动指令;
所述校正模块,包括:
参数检测子模块,用于检测汽车在行进过程中的第一当前工作参数;
接收子模块,用于接收所述车载传感器反馈的第二当前工作参数;
第二处理子模块,同时与所述检测子模块和接收子模块连接,用于比较所述第一当前工作参数和第二工作参数的目标相似度,当所述目标相似度小于预设相似度时,根据所述第一当前工作参数和第二当前工作参数计算出修正因子;
解析子模块,用于解析所述四合一控制模块的转向指令或驱动指令获得所述转向指令对应的第一转向角度或驱动指令对应的第一驱动加速度和第一驱动距离;
校正子模块,同时与所述第二处理子模块和解析子模块连接,用于利用所述修正因子校正所述转向指令对应的第一转向角度或驱动指令对应的第一驱动加速度和第一驱动距离以获得转向指令对应的第二转向角度或驱动指令对应的第二驱动加速度和第二驱动距离。
优选的,所述系统还包括:助力减速控制模块,所述助力减速控制模块包括:
采集子模块,与第三处理子模块和汽车的车载传感器连接,用于采集汽车的车速、转向电机转速、系统状态、转向电机控制量;
所述第三处理子模块,另一端与控制子模块连接,用于根据所述采集子模块的采集结果,计算汽车转向的阻尼补偿量、摩擦补偿量和惯性补偿量,根据汽车转向的阻尼补偿量、摩擦补偿量和惯性补偿量计算出汽车转向的助力参数;
所述控制子模块,与所述转向电机控制子模块连接,用于根据所述第三处理器子模块计算出来的助力参数和汽车方向盘发出的控制信号对转向电机的转速进行补偿。
优选的,所述转向电机控制子模块与所述铅酸电池连接,所述驱动电机控制子模块与所述蓄电池连接。
优选的,所述第一预设电压范围为60V-540V,所述第二预设电压范围为24V-72V。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
在附图中,部件和标号的对应关系如下:
1、驱动/转向一体模块;1.1、转向电机;1.2、轮毂电机;2、四合一控制模块;2.1、电容;2.2、变压器;2.3、转向电机控制子模块;2.4、驱动电机控制子模块;3、蓄电池;4、铅酸电池;5、制冷模块;5.1、温度检测子模块;5.2、第一处理子模块;5.3、制冷子模块;6、校正模块;6.1、参数检测子模块;6.2、接收子模块;6.3、第二处理子模块;6.4、解析子模块;6.5、校正子模块;7、助力减速控制模块;7.1、采集子模块;7.2、第三处理子模块;7.3控制子模块。
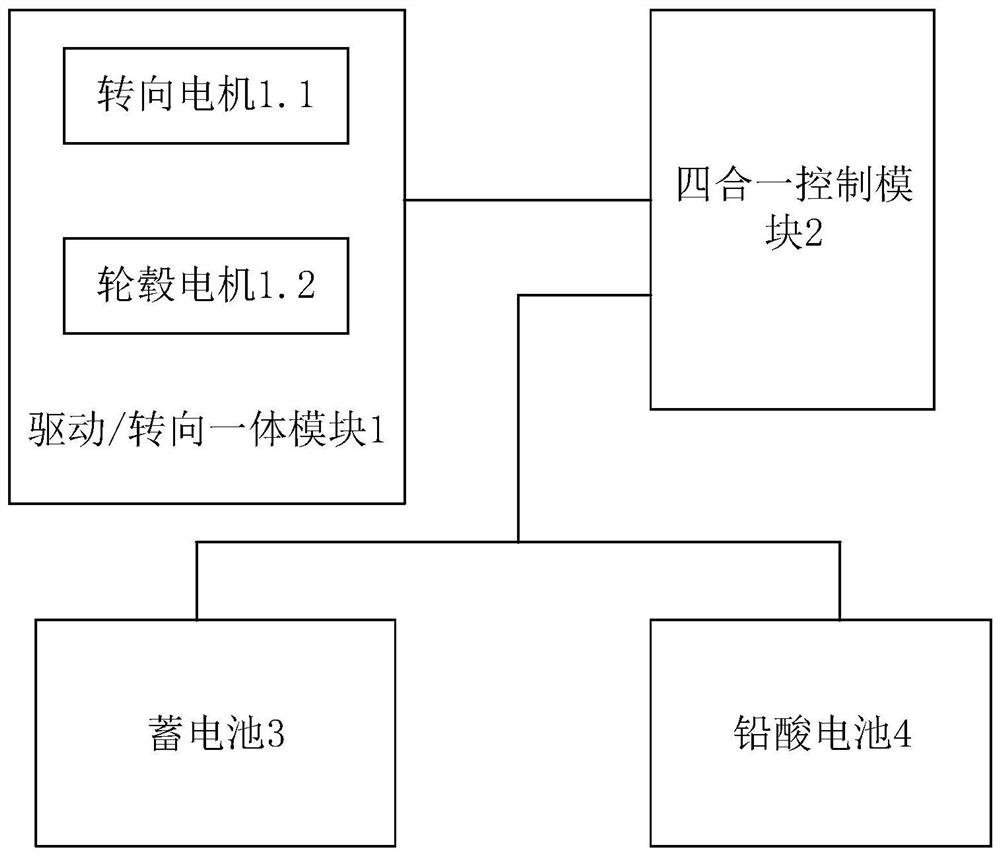
图1为本发明所提供的一种汽车驱动/转向控制系统的结构示意图;
图2为本发明所提供的四合一控制模块的结构示意图;
图3为本发明所提供的制冷模块的结构示意图;
图4为本发明所提供的校正模块的结构示意图;
图5为本发明所提供的助力减速控制模块的结构示意图;
图6为根据本发明所生成的集成式智能转向模块控制的结构示意图;
图7为根据本发明所提供的四合一控制器的实施例结构示意图。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置和方法的例子。
随着电动汽车产业的发展,人们对它的要求也越来越高,主要体现在安全性,可操纵性、舒适性,智能化等方向;四轮独立驱动-独立转向的电动车辆除了具有分布式驱动电动车辆较短的传动链,较高的传动效率,紧凑的结构等优点以外,其车辆的机动性和可操纵性更高,在狭窄的区间内可以实现较小的转弯半径和原地转向,未来与智能化汽车的要求兼容性更强。目前该领域已经开始吸引越来越多人的关注与研究。四轮独立驱动-独立转向电动车辆,是在每一个轮子上集成了轮毂电机和转向电机,以纵向为0度可以实现左右各旋转90度的转角,从而可以实现前轮转向,后轮转向,四轮异向转向,楔向转向,横行以及原地转向等模式。由于单个独立驱动/转向模块需要一个轮毂电机控制单元,一个直流转向的伺服电机控制单元,每个车需要配备4个轮毂电机控制单元和4和转向的直流伺服电机控制单元,共计8个电机控制器,各个控制器之间通过CAN通信的方式统一通过整车控制器VCU进行调度控制。8个控制器不仅增车身的重量,同时占据了较多的布置空间,为汽车内的部件布局带来了一定的困难,同时较复杂的CAN网络也使的整车控制以及数据监控较为繁琐,为了解决上述问题,本实施例公开了一种汽车驱动/转向控制系统。
一种汽车驱动/转向控制系统,如图1所示,该系统包括:
驱动/转向一体模块1,用于对汽车进行驱动或者转向操作;
四合一控制模块2,与所述驱动/转向一体模块1连接,用于控制所述驱动/转向一体模块1对汽车进行驱动或者转向操作;
蓄电池3,与所述四合一控制模块2连接,用于向所述四合一控制模块2提供第一预设电压范围的电能;
铅酸电池4,与所述四合一控制模块2连接,用于向所述四合一控制模块2提供第二预设电压范围的电能。
上述技术方案的工作原理为:在司机开车过程中,通过方向盘和油门发出控制指令,四合一控制模块2在接收到控制指令后控制驱动/转向一体模块执行控制指令以对汽车进行驱动或者转向操作,利用蓄电池和铅酸电池为四合一控制模块提供不同电压的电能以保证对于车辆驱动或者转向的稳定控制。
上述技术方案的有益效果为:通过设置四合一控制模块可以有效利用控制器内部空间,尽可能的减小总体尺寸和重量,同时多合一控制器内部可以共用CAN网络,可以有效减少CAN通道的数量,从而降低CAN网络的复杂度,既实现了对于汽车驱动和转向的稳定控制又降低了汽车的整体重量,使得汽车可以更加快速地行驶,提高了司机的驾驶体验感。
在一个实施例中,如图1所示,所述驱动/转向一体模块1,包括:
转向电机1.1,用于控制汽车轮胎进行转向;
轮毂电机1.2,用于控制汽车轮胎进行驱动。
上述技术方案的有益效果为:通过设置不同的电机来控制汽车不同的操作可以使得每个电机保持独立的工作,避免由于单一电机进行多重控制而导致电机寿命急速下降而大大地损耗了成本情况的发生,延长了电机的使用寿命。
在一个实施例中,如图2所示,所述四合一控制模块2,包括:
电容2.1,一端通过直流母线接口与蓄电池3连接,另一端与变压器2.2连接,用于储能与滤波,以保证系统安全;
所述变压器2.2,另一端与转向电机控制子模块2.3连接,用于调节所述四合一控制模块2的输出电压;
所述转向电机控制子模块2.3,通过直流/交流输出接口与所述驱动/转向一体模块1连接,用于生成转向指令并根据所述转向指令控制所述驱动/转向一体模块1进行转向操作;
驱动电机控制子模块2.4,一端与所述电容2.1连接,另一端通过三项输出接口与所述驱动/转向一体模块1连接,用于生成驱动指令并根据所述驱动指令控制所述驱动/转向一体模块1进行驱动操作。
上述技术方案的有益效果为:通过设置电容和变压器可以保证为系统的各个模块提供安全稳定地电压,避免由于电压过高而损坏汽车内部设备情况的发生,节省了成本,进一步地,通过设置转向电机控制子模块和驱动电机控制子模块来控制驱动/转向一体模块进行不同的汽车操作可以更加灵活和稳定地控制汽车进行转向和驱动,提高了汽车行驶的稳定性和安全性。
在一个实施例中,所述直流/交流输出接口包括第一直流/交流输出接口和第二直流/交流输出接口,所述三项输出接口包括第一三项输出接口和第二三项输出接口。
上述技术方案的有益效果为:通过分别设置两个相同的接口既可以稳定地控制驱动/转向一体模块进行工作,又可以保证在某个接口损坏时剩余的另一个接口也可以对驱动/转向一体模块进行控制,进一步地提高了稳定性以及实用性。
在一个实施例中,如图3所示,所述系统还包括,制冷模块5,与所述四合一控制模块2连接,用于对所述四合一控制模块2进行降温;
所述制冷模块5,包括:
温度检测子模块5.1,用于检测所述四合一控制模块2所在预设范围内的第一温度和汽车内部的第二温度;
第一处理子模块5.2,与所述温度检测子模块5.1连接,用于根据所述第一温度和第二温度判断所述四合一控制模块2的工作温度是否超标,若是,生成制冷指令,否则,无需进行后续操作;
制冷子模块5.3,与所述第一处理子模块5.2连接,用于根据所述制冷指令将汽车内部的空气进行制冷以实现对所述四合一控制模块2的降温;
在本实施例中,上述预设范围内为方圆30cm。
上述技术方案的有益效果为:通过对四合一控制模块所在预设范围内的空气进行指令进而实现对四合一控制模块的降温可以保证四合一控制模块的稳定工作。提高了工作效率。
在一个实施例中,如图4所示,所述系统还包括,校正模块6,一端与所述汽车的车载传感器连接,另一端与所述四合一控制模块2连接,用于校正所述四合一控制模块2的转向指令或驱动指令;
所述校正模块6,包括:
参数检测子模块6.1,用于检测汽车在行进过程中的第一当前工作参数;
接收子模块6.2,用于接收所述车载传感器反馈的第二当前工作参数;
第二处理子模块6.3,同时与所述检测子模块和接收子模块6.2连接,用于比较所述第一当前工作参数和第二工作参数的目标相似度,当所述目标相似度小于预设相似度时,根据所述第一当前工作参数和第二当前工作参数计算出修正因子;
解析子模块6.4,用于解析所述四合一控制模块2的转向指令或驱动指令获得所述转向指令对应的第一转向角度或驱动指令对应的第一驱动加速度和第一驱动距离;
校正子模块6.5,同时与所述第二处理子模块6.3和解析子模块6.4连接,用于利用所述修正因子校正所述转向指令对应的第一转向角度或驱动指令对应的第一驱动加速度和第一驱动距离以获得转向指令对应的第二转向角度或驱动指令对应的第二驱动加速度和第二驱动距离。
上述技术方案的有益效果为:通过对控制指标进行校正可以使得汽车每次的驱动和转向都保持一个稳定地水准,同时也避免了由于车载传感器检测数据不准而发出与司机意图不相同的控制指令从而出现交通事故,进一步地提高了安全性。
在一个实施例中,如图5所示,所述系统还包括:助力减速控制模块7,所述助力减速控制模块7包括:
采集子模块7.1,与第三处理子模块7.2和汽车的车载传感器连接,用于采集汽车的车速、转向电机转速、系统状态、转向电机控制量;
所述第三处理子模块7.2,另一端与控制子模块7.3连接,用于根据所述采集子模块7.1的采集结果,计算汽车转向的阻尼补偿量、摩擦补偿量和惯性补偿量,根据汽车转向的阻尼补偿量、摩擦补偿量和惯性补偿量计算出汽车转向的助力参数;
所述控制子模块7.3,与所述转向电机控制子模块2.3连接,用于根据所述第三处理器子模块7.2计算出来的助力参数和汽车方向盘发出的控制信号对转向电机1.1的转速进行补偿;
在本实施例中,控制子模块根据助力参数,对汽车方向盘发出的控制信号进行修正,调整转向电机的转速,保证汽车转向更轻便灵敏,路感更好,安全性更高。
上述技术方案的有益效果为:助力减速控制单元通过对汽车的车速、转向电机转速、系统状态、转向电机控制量的采集计算出汽车转向的助力参数,再根据助力参数,对汽车方向盘发出的控制信号进行修正,调整转向电机的转速,从而保证汽车转向更轻便灵敏,路感更好,安全性更高。
在一个实施例中,所述转向电机控制子模块2.3与所述铅酸电池4连接,所述驱动电机控制子模块2.4与所述蓄电池3连接。
在一个实施例中,所述第一预设电压范围为60V-540V,所述第二预设电压范围为24V-72V。
在一个实施例中,转向电机控制子模块2.3和驱动电机控制子模块2.4通过矢量控制的方式对驱动/转向一体模块中的转向电机1.1和轮毂电机1.2进行控制。
上述技术方案的有益效果为:相对于传统车辆,矢量控制的轮毂电机将动力、传动和制动装置都整合到轮毂内,可以获得更好的空间利用率,同时传动效率也要高出不少,基于驱动/转向一体化的模块可以实现汽车的前轮转向,四轮异向转向,楔形运行,横行以及360度的原地转向,因此该种方式可以解决汽车在狭窄空间的转弯问题。
在一个实施例中,如图6和图7所示,在本方案中,四合一控制单元包含了两个用于驱动轮子的轮毂电机控制单元,两个转向电机控制器单元,单台车仅需要配备两台四合一控制器,控制器布局可分为是三种,第一种是两台四合一控制器分别控制前左右轮驱动/转向模块,后左右轮驱动/转向模块,第二种是分别控制左前后两个驱动/转向模块和右前后两个驱动/转向模块,第三种是分别控制左前右后两个驱动/转向模块和右前左后两个驱动/转向模块,四合一控制器母线输入是直流电压,常用电压区间为60V~540V,母线电压经过电容后分别连接到两组逆变器,经过主控板与驱动控制以后最终输出两组三相交流电,用于驱动两台轮毂流电机,它们共用一套主控板;由于直流伺服电机控制器一般为低压系统,电压等级在24V~到72V之间,常用为48V或者60V,因此四合一控制器单元内部配备变压器,用以提供安全稳定的电压。
本领域技术人员应当理解的是,本发明中的第一、第二指的是不同应用阶段而已。
本领域技术用户员在考虑说明书及实践这里公开的公开后,将容易想到本公开的其它实施方案。本申请旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由下面的权利要求指出。
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
- 电动汽车用四轮毂电机驱动实现四轮转向的电子差速转向控制系统
- 一种分布式驱动电动汽车的差动助力转向控制系统及方法