一种多通道的运动
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及自动化系统技术领域,尤其涉及一种多通道的运动。
背景技术
随着自动系统大型化、复杂化的发展,一条自动化系统受控的轴数也越来越多,所要求的的控制器性能也越来越高,往往要求同一时间能加工不同的产品,且相互独立、互不影响。
多通道的运动可同时控制多个轴同时在空间内进行运动;同时完成多个产品在自动化产线的生产。每个通道可以实现快速定位、直线插补、圆弧插补等。
用户可自由使用编程语言实现多通道的插补运动。
使用传统的控制器只能操作单通道运动,只能实现串行加工、加工效率低。
发明内容
基于背景技术中提出的使用传统的控制器只能操作单通道运动,只能实现串行加工、加工效率低的技术问题,本发明提出了一种多通道的运动。
本发明提出的一种多通道的运动,包括多通道,所述多通道运动包括有通道开启、指令的触发、指令的运动、加减速规划和更换通道的受控轴,为满足并行所述多通道加工提高加工效率,本方案提供以下功能:
功能一:每个通道可自由配置构成轴;
功能二:每个通道可配置不同的机械机构;
功能三:每个通道可执行指令同时运动;
功能四:支持动态修改某个通道的构成轴;
本方案支持4-8通道同时运动,每个通道可分别配置不同的机械结构与机械参数,如下配置:#1XY结构、#2XYZ结构、#3XYZC结构、#4XYZAB结构、#5SCARA结构…
每个通道可配置受控的单轴索引号,如下配置:XYZAB结构、X轴-1号电机、Y轴-2号电机、Z轴-3号电机、A轴-4号电机;
用户可通过编程同时触发指令,可使不同通道同时运动,具体指令举例:G_LineS0 S1 S2 S3;
S0:指令位置、加减速输入;
S1:指令错误码输出;
S2:指令状态输出;
S3:通道号;
用户使用构成轴修改指令,动态修改通道内受控的单轴号,解决不同通道内单轴共用的问题,具体指令举例:G_CONFIGAXIS S0 S1 S2S3;
S0:受控单轴轴号1、轴号2、轴号3…
S1:指令错误码输出;
S2:指令状态输出;
S4:通道号。
优选地,以电气运动控制型PLC XDH-60T4为例来详述多通道运动的方法,通道开启包括以下步骤:
正运动学:由关节角度转化到机械末端的位置,关节角度即每轴的位置;
逆运动学:机械末端位置转化到每个关节的角度值;
连杆参数:正运动学计算时进行坐标转化所必须的参数,比如连杆长度、连杆的偏移、连杆间的旋转角;
减速比:提高关节的控制精度和转矩;受控轴:通道内控制的每个单轴,用户给的数据点必须经过该步骤才能使电机运行;
S1、单轴打开使能;
S2、通道启用校验:
S2.1校验受控的单轴是否使能;
S2.2受控的单轴是否已在其他启用的通道内使用;
S2.3通道的机械参数是否正确:连杆参数、减速比、软硬限位、运动性能参数;
S3、参数正常时,则进行正运动学计算、逆运动学计算。
优选地,所述指令的触发、指令的运动包括以下详细步骤:通道使能、反馈位置:由电机反馈给轴的位置;位置输出:通道内计算单轴的位置发送给单轴;
(1)、通道使能位打开、并且初始化完成;
(2)、每个控制周期先刷新各单轴的反馈位置;每个周期进行运动学的正解换算到机械末端的位置。
(3)、若用户触发了指令,则每周期进行插补位置的计算;
(4)、每个控制周期讲给定的位置发送给轴,使电机运行;
(5)、指令触发:控制周期内检测到相应的通道运动指令触发,则进行指令的初始化、内部插补的初始化、速度约束、规划运动曲线;用户触发指令可分为:G_LINE、G_CONFIGAXIS;
a)指令初始化:指令运行的状态;
b)插补初始化:起点位置、终点位置、速度、加速度、减速度、加加速度、坐标系;
c)规划运动曲线:根据用户输入的速度参数,进行时间规划;
速度约束:轨迹的速度、加速度、减速度、加加速度约束;单轴的速度、加速度、减速度、加加速度约束。
优选地,所述指令出发中的加减速规划:依据指令注册计算的加减速参数,每个周期输入时间T,计算每个时刻对应的位置。
优选地,所述加减速规划的操作包括以下详细步骤:
1)、周期性的进行每个通道内的插补计算、使每个通道内的电机运动;
2)、每个通道按照顺序依次执行;若通道使能则进行加减速规划,若通道未启用时,则本通道立即结束;
3)、每个周期计算本时刻对应的插补点,并且进行逆解计算,将点位转化到单轴的位置;
4)、通道全部计算完毕时,本周期结束,等待下周期开始。
优选地,述更换通道的受控轴具体包括以下操作:
更换受控轴:既可以是通道内的轴、也可以是其他通道的轴,该通道未启用;
构成轴处于静止:构成轴已使能,并且处于未运动状态;
初始化变量:通道的给定位置、反馈位置、插补的起点位置、插补的终点位置等等;
G_CONFIGAXIS指令:输入参数包含:需要更换的轴号、通道号、状态位地址、错误码地址;
A、指令校验:
a)本通道处于运动中,返回错误;
b)构成轴没有被其他启用的通道使用;
c)构成轴处于静止状态;
B、检验通过后,重新进行正解计算,初始化通道内部值;
该指令执行结束。
优选地,所述多通道运动通过指令G_Line S0 S1 S2 K0、G_Line S0 S1 S2 K1、G_Line S0 S1 S2 K2可同时触发通道0、通道1与通道2的运动,每条通道独立规划,互不影响。
本发明中的有益效果为:
1、该多通道的运动,通过设置有方案解决了传统控制器只能使用单通道运动,无法多个通道同时工作;可通过编程更换任意通道内的单轴号,单轴可以为任意通道内的受控轴;本申请提高加工效率,多通道可使用不同的机械结构,支持多通道同时运动,可支持动态修改通道内构成轴。
2、该多通道的运动,为满足并行多通道加工,提高加工效率,本方案提供以下功能:
1.每个通道可自由配置构成轴
2.每个通道可配置不同的机械机构
3.每个通道可执行指令同时运动
4.支持动态修改某个通道的构成轴。
该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
图1为本发明提出的一种多通道的运动的多通道的机械模型建立的结构示意图;
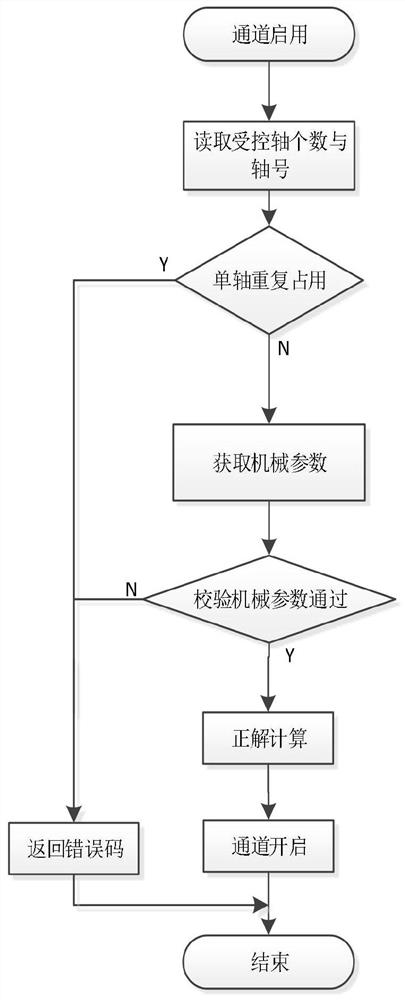
图2为本发明提出的一种多通道的运动的多通道执行流程图的结构示意图;
图3为本发明提出的一种多通道的运动的多通道插补流程的结构示意图;
图4为本发明提出的一种多通道的运动的更换通道的受控轴流程图的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
参照图1-4,一种多通道的运动,包括多通道,多通道运动包括有通道开启、指令的触发、指令的运动、加减速规划和更换通道的受控轴,为满足并行多通道加工提高加工效率,本方案提供以下功能:
功能一:每个通道可自由配置构成轴;
功能二:每个通道可配置不同的机械机构;
功能三:每个通道可执行指令同时运动;
功能四:支持动态修改某个通道的构成轴;
本方案支持4-8通道同时运动,每个通道可分别配置不同的机械结构与机械参数,如下配置:#1XY结构、#2XYZ结构、#3XYZC结构、#4XYZAB结构、#5SCARA结构…
每个通道可配置受控的单轴索引号,如下配置:XYZAB结构、X轴-1号电机、Y轴-2号电机、Z轴-3号电机、A轴-4号电机;
用户可通过编程同时触发指令,可使不同通道同时运动,具体指令举例:G_LineS0 S1 S2 S3;
S0:指令位置、加减速输入;
S1:指令错误码输出;
S2:指令状态输出;
S3:通道号;
用户使用构成轴修改指令,动态修改通道内受控的单轴号,解决不同通道内单轴共用的问题,具体指令举例:G_CONFIGAXIS S0 S1 S2S3;
S0:受控单轴轴号1、轴号2、轴号3…
S1:指令错误码输出;
S2:指令状态输出;
S4:通道号。
本发明中,以电气运动控制型PLC XDH-60T4为例来详述多通道运动的方法,通道开启包括以下步骤:
正运动学:由关节角度转化到机械末端的位置,关节角度即每轴的位置;
逆运动学:机械末端位置转化到每个关节的角度值;
连杆参数:正运动学计算时进行坐标转化所必须的参数,比如连杆长度、连杆的偏移、连杆间的旋转角;
减速比:提高关节的控制精度和转矩;受控轴:通道内控制的每个单轴,用户给的数据点必须经过该步骤才能使电机运行;
S1、单轴打开使能;
S2、通道启用校验:
S2.1校验受控的单轴是否使能;
S2.2受控的单轴是否已在其他启用的通道内使用;
S2.3通道的机械参数是否正确:连杆参数、减速比、软硬限位、运动性能参数;
S3、参数正常时,则进行正运动学计算、逆运动学计算。
本发明中,指令的触发、指令的运动包括以下详细步骤:通道使能、反馈位置:由电机反馈给轴的位置;位置输出:通道内计算单轴的位置发送给单轴;
(1)、通道使能位打开、并且初始化完成;
(2)、每个控制周期先刷新各单轴的反馈位置;每个周期进行运动学的正解换算到机械末端的位置。
(3)、若用户触发了指令,则每周期进行插补位置的计算;
(4)、每个控制周期讲给定的位置发送给轴,使电机运行;
(5)、指令触发:控制周期内检测到相应的通道运动指令触发,则进行指令的初始化、内部插补的初始化、速度约束、规划运动曲线;用户触发指令可分为:G_LINE、G_CONFIGAXIS;
a)指令初始化:指令运行的状态;
b)插补初始化:起点位置、终点位置、速度、加速度、减速度、加加速度、坐标系;
c)规划运动曲线:根据用户输入的速度参数,进行时间规划;
速度约束:轨迹的速度、加速度、减速度、加加速度约束;单轴的速度、加速度、减速度、加加速度约束。
本发明中,指令出发中的加减速规划:依据指令注册计算的加减速参数,每个周期输入时间T,计算每个时刻对应的位置。
本发明中,加减速规划的操作包括以下详细步骤:
1)、周期性的进行每个通道内的插补计算、使每个通道内的电机运动;
2)、每个通道按照顺序依次执行;若通道使能则进行加减速规划,若通道未启用时,则本通道立即结束;
3)、每个周期计算本时刻对应的插补点,并且进行逆解计算,将点位转化到单轴的位置;
4)、通道全部计算完毕时,本周期结束,等待下周期开始。
本发明中,更换通道的受控轴具体包括以下操作:
更换受控轴:既可以是通道内的轴、也可以是其他通道的轴,该通道未启用;
构成轴处于静止:构成轴已使能,并且处于未运动状态;
初始化变量:通道的给定位置、反馈位置、插补的起点位置、插补的终点位置等等;
G_CONFIGAXIS指令:输入参数包含:需要更换的轴号、通道号、状态位地址、错误码地址;
A、指令校验:
a)本通道处于运动中,返回错误;
b)构成轴没有被其他启用的通道使用;
c)构成轴处于静止状态;
B、检验通过后,重新进行正解计算,初始化通道内部值;
该指令执行结束。
本发明中,多通道运动通过指令G_Line S0 S1 S2 K0、G_Line S0S1 S2 K1、G_Line S0 S1 S2 K2可同时触发通道0、通道1与通道2的运动,每条通道独立规划,互不影响。
本方案解决了传统控制器只能使用单通道运动,无法多个通道同时工作;可通过编程更换任意通道内的单轴号,单轴可以为任意通道内的受控轴;本申请提高加工效率,多通道可使用不同的机械结构,支持多通道同时运动,可支持动态修改通道内构成轴。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 机载多通道CSSAR地面运动目标运动参数估计方法
- 机载多通道CSSAR地面运动目标运动参数估计方法