一种三自由度姿态调整装置及方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及姿态调整装置,尤其涉及一种三自由度姿态调整装置及方法。
背景技术
自由度是指物理学当中描述一个物理状态,独立对物理状态结果产生影响的变量的数量,运动自由度是确定一个系统在空间中的位置所需要的最小坐标数,自由度是根据机械原理的具有确定运动时所必须给定的独立运动参数的数目,机械设备装配时根据其所确定的自由度及参数方程,可精确计算出机械装配定位点。
目前,民用和航空航天军工领域在进行设备的装配时多采用传统机械提升装置进行装配或人工校准的方式进行撞别人,现有的定位校准装置的安装过程时间较长,工作精度较差,其人工工时过长,装配效率较低。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,简化姿态调整过程,提出一种三自由度姿态调整装置及方法。
为了实现上述目的,本发明采用了如下技术方案:
一种三自由度姿态调整装置,包括上层调姿台、下层平台、前驱动装置、中驱动装置、后驱动装置、两个测量单元和四个锁紧机构,所述前驱动装置包括前驱动装置伺服电缸、前驱动装置安装底座、前驱动装置活塞杆、接头、滑块安装座、前驱动装置伺服电机、前驱动装置导轨、第一导轨安装板,所述中驱动装置包括中驱动装置伺服电缸、中驱动安装底座、中驱动装置活塞杆、接头、滑块安装座、中驱动装置伺服电机、中驱动装置导轨、第二导轨安装板和靶标,所述后驱动装置包括后驱动装置电缸、后驱动装置安装底座、后驱动装置活塞杆、接头、滑块安装座、后驱动装置伺服电机、后驱动装置导轨、第三导轨安装板,每个所述测量单元均包括有相机、激光位移传感器、测量单元安装底板;所述上层调姿台与前驱动装置、中驱动装置、后驱动装置之间分别通过第一导轨安装板、第二导轨安装板和第三导轨安装板连接,下层平台与前驱动装置、中驱动装置、后驱动装置之间分别通过前驱动装置安装底座、中驱动装置安装底座和后驱动装置安装底座连接;每个所述测量单元与上层调姿台之间均通过测量单元安装底板连接;每个所述锁紧机构通过侧边挡板与下层平台连接;所述靶标为棋盘格标定板。
优选的,所述前驱动装置、中驱动装置、后驱动装置在初始状态时,前驱动装置活塞杆和后驱动装置活塞杆均处于伸出状态,伸出距离相等,为L
优选的,所述前驱动装置导轨和后驱动装置导轨均沿前后方向安装,所述中驱动装置导轨沿左右方向安装。
优选的,所述前驱动装置导轨、中驱动装置导轨和后驱动装置导轨均与位置正对的滑块安装座滑动连接。
优选的,所述第一接头孔、第二接头孔和第三接头孔在初始状态时位于同一直线上,所述第二接头孔位于第一接头孔和第三接头孔之间的中心处。
优选的,所述下层平台顶端的中心处设有基坐标系,所述基坐标系原点设置在第二接头孔孔心,X轴与中驱动装置导轨垂直,Y轴与中驱动装置导轨平行。
优选的,两个所述激光位移传感器之间距离为L
优选的,所述上层调姿台具有三个运动自由度,包括前后移动、横向移动和绕平台中心转动。
本发明的技术效果和优点:
(1)通过前驱动装置、中驱动装置、后驱动装置和测量单元可对上层调姿台的三个自由度姿态调整,包括前后移动、横向移动和绕平台中心转动,便于采集上层调姿台在进行装配时的自由度参数,从而提高机械定位的精确度,且提高了机械的装配效率。
(2)通过激光位移传感器和相机可及时对机械时装配所需的上层调姿台的三个自由度进行数据采集,便于及时测算调整,提高了装配效率。
附图说明
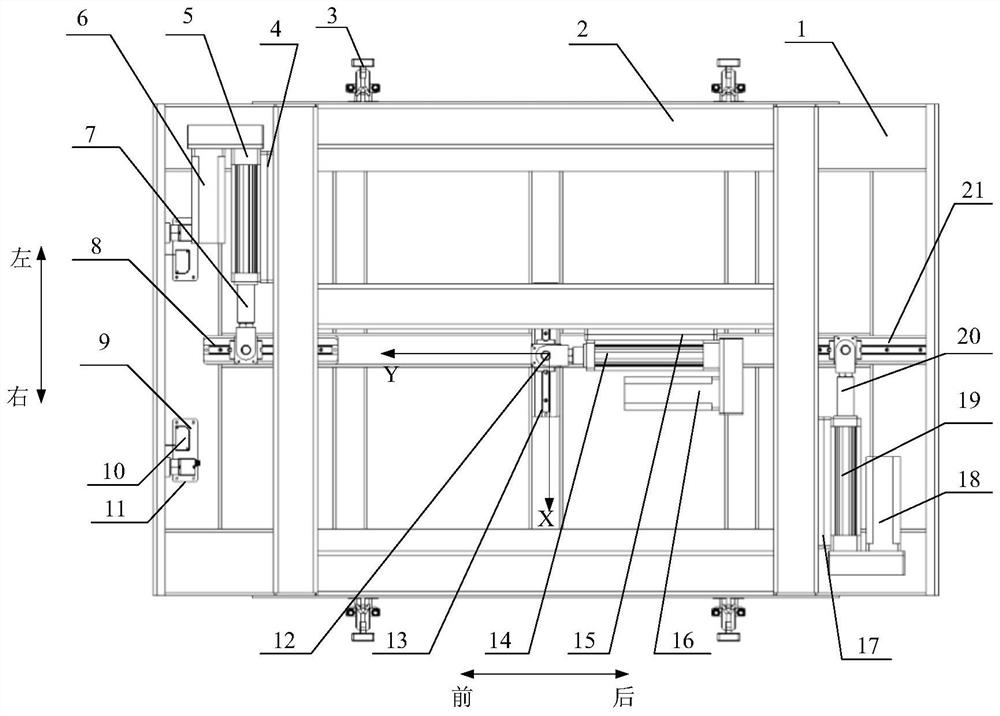
图1为本发明整体结构图。
图2为本发明前驱动装置、中驱动装置和后驱动装置示意图。
图3为本发明接头结构示意图。
图4为本发明靶标示意图。
图5为本发明运动示意图。
图中:1、上层调姿台;2、下层平台;3、锁紧机构;4、前驱动装置安装底座;5、前驱动装置伺服电缸;6、前驱动装置伺服电机;7、前驱动装置活塞杆;8、前驱动装置导轨;9、测量单元安装底板;10、激光位移传感器;11、相机;12、中驱动装置活塞杆;13、中驱动装置导轨;14、中驱动装置伺服电缸;15、中驱动装置安装底座;16、中驱动装置伺服电机;17、后驱动装置安装底座;18、后驱动装置伺服电机;19、后驱动装置电缸;20、后驱动装置活塞杆;21、后驱动装置导轨。
具体实施方式
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
如图1-5所示的一种三自由度姿态调整装置,包括上层调姿台1、下层平台2、前驱动装置、中驱动装置、后驱动装置、两个测量单元和四个锁紧机构3,所述前驱动装置包括前驱动装置伺服电缸5、前驱动装置安装底座4、前驱动装置活塞杆7、接头、滑块安装座、前驱动装置伺服电机6、前驱动装置导轨8、第一导轨安装板,所述中驱动装置包括中驱动装置伺服电缸14、中驱动安装底座15、中驱动装置活塞杆12、接头、滑块安装座、中驱动装置伺服电机16、中驱动装置导轨13、第二导轨安装板和靶标,所述后驱动装置包括后驱动装置电缸19、后驱动装置安装底座17、后驱动装置活塞杆20、接头、滑块安装座、后驱动装置伺服电机18、后驱动装置导轨21、第三导轨安装板,每个所述测量单元均包括有相机11、激光位移传感器10、测量单元安装底板9;所述上层调姿台1与前驱动装置、中驱动装置、后驱动装置之间分别通过第一导轨安装板、第二导轨安装板和第三导轨安装板连接,下层平台2与前驱动装置、中驱动装置、后驱动装置之间分别通过前驱动装置安装底座4、中驱动装置安装底座15和后驱动装置安装底座17连接;每个所述测量单元与上层调姿台1之间均通过测量单元安装底板9连接;每个所述锁紧机构3通过侧边挡板与下层平台2连接;所述靶标为棋盘格标定板。
如图1-5所示,前驱动装置、中驱动装置、后驱动装置在初始状态时,前驱动装置活塞杆7和后驱动装置活塞杆20均处于伸出状态,伸出距离相等,为L
本发明工作原理:标定相机11与姿态调整装置坐标系转换关系
g)中驱动装置伸出20mm;
h)中驱动装置伸出20mm;
i)中驱动装置缩回40mm,前驱动装置伸出20mm,后驱动装置缩回20mm;
j)前驱动装置缩回40mm,后驱动装置伸出40mm;
k)前驱动装置伸出30mm,后驱动装置缩回30mm;
l)前驱动装置缩回20mm,后驱动装置伸出20mm;
提取上述六个动作后采集图像的角点坐标,靶标坐标系定义在棋盘格左下角,横向为Y轴,纵向为X轴,Z轴垂直于靶标平面,计算相机与靶标之间坐标系转换关系
式中,i=1,2,m,n=(1,…,6),利用TSAI-LENZ方法计算相机11与姿态调整装置之间坐标系转换关系;两个测量单元的激光位移传感器10测量靶标,分别获取距离值D
前驱动装置活塞杆7和后驱动装置活塞杆20动作分为两种情况:如果D
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种三自由度姿态调整装置及方法
- 一种三自由度姿态调整装置