一种太空漫步机用阻尼控制装置
文献发布时间:2023-06-19 12:00:51
技术领域
本发明属于健身器材中家用太空漫步机技术领域中的阻力调节的技术范畴,尤其涉及应用于家用太空漫步机的一种太空漫步机用阻尼控制装置。
背景技术
太空漫步机又叫椭圆机,作为一种用于心肺功能锻炼效果很好的器械,它受到不少使用者和专业人士的喜爱。椭圆机的斜坡设计、阻力抵抗调节功能、编排好的运动模式以及专门对下肢某组织肌肉进行锻炼的能力让它成为专业健身房和家庭起居室里常见的运动器械。
其中阻力抵抗调节功能是通过阻力调节装置来实现的,目前阻力调节装置采用调节方式有:
1.电磁阻力控制,它的不同之处在于:变换外界电流的强弱程度来改变电磁阻力的控制器,由此来控制牵制力的强度来调节运动的强度;
2.手动阻力调节,通过手动阻力调节器和磁控装置来实现运动强度大小控制;
磁控装置的椭圆机:机器运转时,在飞轮边缘的磁铁圈会对飞轮产生牵制力,磁铁圈和飞轮距离越小阻力越大。最便捷有效又简单的手动磁阻力调节器是拉线+旋钮的方式来实现磁铁圈和飞轮的距离调节,来实行控制阻力大小;
3.机械摩擦力,机器运转时,在飞轮边缘设置好的橡胶类或者相近材质的摩擦块,去靠近飞轮对飞轮产生摩擦阻力,一次来实现独立的调节。
上述阻力调节装置能够很好的实现阻力调节,然后存在如下缺点:
1.采用磁力调节的椭圆机,对于心脏中装有起搏器,除颤器等辅助设备的使用者来说是非常危险的,需要进行必要的隔磁防护。
2.采用机械摩擦力方式调节阻力的椭圆机,需要适时的更滑摩擦块,对于没有专业维护技能的使用者来说,并不知道合适才需要更换,需要售后的协助才能完成,同时也是产品售后维护的一大问题。
综上所述,迫切需要一种没有磁场,免维护的阻力调节装置来满足心脏中装有起搏器,除颤器等辅助设备的使用者的使用。
发明内容
本发明要实现的目标是:满足心脏中装有起搏器,除颤器等辅助设备的使用者的使用。
为了实现上述目标,本发明提供一种太空漫步机用阻尼控制装置。
本发明所采用的具体技术方案为:
一种太空漫步机用阻尼控制装置,所述阻尼控制装置,包括:
— 阻尼装置,通过连接器与太空漫步机的脚踏板连接,为脚踏板提供阻尼力,阻尼装置包括装有阻尼液阻尼器和安装在阻尼器壳体中的叶轮,所述阻尼液的阻尼力随着所述叶轮转速的变化而同向变化,由叶轮的转速变化得到可变阻尼力,传递给脚踏板;
— 速度调节装置,设于连接器和阻尼器壳体之间,且分别与连接器和叶轮连接,传递脚踏板的动力通过速度调节装置传递给叶轮并调节叶轮的转速。
与现有太空漫步机阻力调节装置不同的是,本发明采用的是叶轮在阻尼液内转动,利用阻尼液的阻尼力提供阻力调节。优选的,阻尼液采用剪切增稠液体STF,剪切增稠液体STF是由聚乙二醇和硅微粒组成,聚乙二醇是一种应用广泛的无毒液体,能承受的温度范围很广。极其细小的硅微粒是STF的另一成分,当运动缓慢时,硬质粒子能够到处运动,剪切增稠液体STF呈现液态,但当运动迅速的时候,硬质粒子互相碰撞,阻碍了彼此的运动,剪切增稠液体STF变得强韧,这种流动性很强的液体和坚硬的微粒结合后,能形成一种刚性的材料。
当叶轮在剪切增稠液体STF内转动时,对剪切增稠液体STF形成剪切作用力,叶轮转动的速度越快,剪切作用力越大,频率越高,剪切增稠液体STF越发粘稠,所提供的阻尼力就越大。
实现上述功能的阻尼器至少包括一个填充有阻尼液的密闭的阻尼器壳体,和一个在阻尼液内旋转的叶轮。通过叶轮在阻尼器壳体的内部转动,改变阻尼液的阻尼力,使得太空漫步机阻力调节装置获得可变的阻力。
其中叶轮的结构形式根据其在阻尼器中的运动情况可以适当的调整叶轮中叶片的数量,叶片的形状和叶片的页面的镂空大小,叶轮在本发明中作用是搅动阻尼器,对阻尼器形成剪切作用力,这与叶轮在传统的结构中提供推力或者抽真空的作用不同,这就需要叶轮在阻尼液内能够灵活的运动,同时还允许阻尼液能够尽可能多的穿过叶轮的叶片。
此外速度调节装置根据具体的太空漫步机的结构形式,合理选择链轮组与链条的形式实现调节,采用这种形式时连接器为链条,也可以采用行星轮结构实现调节,采用这种形式时连接器为链条,也可以为连杆,根据具体的结构形式而定,这种传动结构为本领域技术人员所熟知。
作为本发明的进一步改进,阻尼器的成盘状,阻尼器的中心处设有垂直于盘状阻尼器盘面的转轴,所述叶轮设有若干片,且均布在转轴的圆周上。
采用这样的设计,叶轮的转轴旋转中心线位于阻尼器中心,也就是阻尼器壳体的中心线,当叶轮转动时,最大限度的搅动阻尼液,在大面积内实现阻尼液阻尼力的变化,进而通过连接器传递给脚踏板,实现阻力的调节。
特别的,叶轮设有若干片,且均布在转轴的圆周上,这种设计可以使阻尼液的同一部分持续受到均匀的剪切作用力,对于阻尼力的改变起到均衡的作用,通过连接器传递给脚踏板后,产生的效果为均匀的阻力,不会出现阻力不均的卡顿现象。
优选的,转轴与阻尼器壳体密封且活动连接在一起,形成的密闭腔体内填充有阻尼液,所述叶轮沉浸在阻尼液内。采用这样的设计,设置在阻尼器壳体的旋转中心线上的转轴,与壳体密封连接,且在其旋转中心线转动,带动转轴上设置的叶轮在壳体内转动,对阻尼液实现剪切运动。
作为本发明的进一步改进,叶轮与转轴的轴线成角度A。角度A范围为10°至35°,优选为20°至30°,将叶轮与转轴的轴线设计成一定的夹角,既有利于叶轮在阻尼液中顺利穿行转动,又能对阻尼液在特定的面积上形成剪切作用力。
作为本发明的进一步改进,叶轮在转轴上成若排布置,每排的有若干个叶轮且均布在转轴的圆周上。当叶轮在阻尼器壳体中空间足够时,可以增加叶轮的排数,以此来增加叶片数量,加强对阻尼液的搅动,持续均匀的对阻尼液施加剪切作用力。
作为本发明的进一步改进,所述叶轮的叶面设有若干贯穿叶面的镂空槽,叶片转动时,阻尼液从镂空槽中穿过。
采用这样的设计,叶片转动时,阻尼液从镂空槽中穿过减轻了对阻尼液的阻挡,分散的作用面使得的叶轮多阻尼液的搅动更加均匀充分,使得硬质粒子互相碰撞的更充分,进一步阻碍了彼此的运动,剪切增稠液体STF变得更加强韧,有利于增大阻尼力。
所述速度调节装置包括若链轮组,链轮组中相邻链轮齿数成线性递增,脚踏板与速度调节装置连接的一端设有转轮,转轮上固定有大链轮,大链轮与链轮组通过链条连接,链轮组的一侧设有拨叉,拨叉沿着所述转轴的轴向移动,改变链条在链轮组的不同链轮上运动,实现叶轮的速度调节。
采用这样的设计,脚踏板固定在大的轮盘上,转轴固定在链轮组的芯轴上,链条大轮盘和链轮组之间形成链传动,而拨叉则在链轮组的一端,通过拉线改变拨叉所对准的链轮组中的链轮,由于拨叉套在链条上,因此带动链条与不同的链轮啮合,形成型的速比,进而改变转轴的转速,最终改变叶轮的转速,阻尼液的阻尼力随着所述叶轮转速的变化而同向变化,由叶轮的转速变化得到可变阻尼力,传递给脚踏板,最终实现阻力调节的功能。
所述速度调节装置包括齿轮组,相邻齿轮齿数成线性递增,所述齿轮组中的齿轮同轴的固定在所述转轴上,齿轮组的外侧套设有齿圈,齿圈可沿着齿轮组的轴向移动,与不同齿数的齿轮配合形成不同的速比,调节叶轮的速度。
采用相同的原理,通过改变齿数来改变传动比,实现对转钟速度的调节,实现这一功能,速度调节装置至少包括所述齿轮组,和与之配合的齿圈,所述齿圈可以在转轴的轴向方向移动与不同齿数的齿轮配合形成不同的速比,转轴的转动可以通过链条带动,即所述链传动。
特别的,转轴的转动也可以通过连杆实现,采用连杆实现转动时,转轴的端部设置一个偏心的铰接点,连杆铰接在偏心的铰接点上,连杆的另外一端,同样偏心的铰接在与脚踏板连接的转盘上,转盘上的铰接点偏心距大于转轴出铰接点的偏心距,形成四缸转动机构。
本发明的积极效果是:
1.本发明提供一种太空漫步机用阻尼控制装置,通过叶轮在阻尼器内的转动获得可变阻尼力,来实现太空漫步机的阻力调节,消除了设备中磁铁,实现了设备的无磁环境,适合普通人群使用,尤其适合满足心脏中装有起搏器,除颤器等辅助设备的使用者的使用。
2.采用通过叶轮在阻尼器的阻尼液内的转动获得可变阻尼力,消除了传统机械结构的耗材,实现了阻力调节装置中零耗材,减少了设备的维护成本,方便用户使用。
附图说明
图1是本发明一种太空漫步机用阻尼控制装置所应用的太空漫步机结构示意图;
图2是图1中所示本发明一种太空漫步机用阻尼控制装置正视图;
图3是本发明一种太空漫步机用阻尼控制装置第一种速度调节装置示意图;
图4是本发明一种太空漫步机用阻尼控制装置第二种速度调节装置示意图;
图5是图1中所示本发明一种太空漫步机用阻尼控制装置另外一种实施方式正视图;;
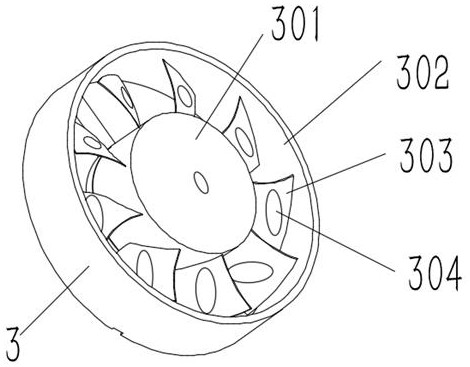
图6是本发明一种太空漫步机用阻尼控制装置第一种速度调节装置的阻尼器结构示意图;
图例说明:1—控制器, 2—脚踏板, 3—阻尼器, 301—转轴, 302—阻尼器壳体,303—叶片, 304—镂空槽,4—大轮盘,401—支臂,5—速度调节装置,501—离合器,502—齿轮组,503—齿轮组芯轴,504—芯轴固定板,505—离合器摆杆,506—芯轴滑动齿轮固定杆,507—芯轴齿轮,508—芯轴连接器,6—链条,601—连杆,7—大轮盘铰接点,8—大链轮,9—链轮组,10—拨叉。
具体实施方式
下面结合附图和具体实施例对本发明进行详细描述:
具体实施例:
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底” “内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
以下结合具体实施例对本发明的具体实现进行详细描述。
具体实施例一
一种太空漫步机用阻尼控制装置,包括阻尼装置和速度调节装置,
— 阻尼装置,包括阻尼器3和安装在阻尼器壳体302中的叶轮,叶轮的叶片303固定在转轴301上,并且在301的圆周上均布,阻尼器3的中心设有速度调节装置5,速度调节装置5通过连接器与大轮盘4偏心的连接在一起,同时太空漫步机的脚踏板2也偏心的连接在大轮盘4上,脚踏板2通过大轮盘4带动连接器来驱动叶轮转动,阻尼器壳体302中填充有阻尼液,阻尼液采用剪切增稠液体STF。
— 速度调节装置5,设于连接器和阻尼器壳体之间,优选为阻尼器3的旋转中心线上,连接器用于连接大轮盘4和速度调节装置5,将大轮盘4的旋转运动传递给速度调节装置。
如图2和图3所示,连接器为链条6,速度调节装置包括链轮组9和拨叉10,大轮盘4上设有支臂401,支臂401 的端部与脚踏板2连接在一起,脚踏板2运动时驱动支臂401绕着大轮盘4的中心转动,大轮盘4的一侧还设有大链轮8,链条6将大链轮8和链轮组9连接起来,拨叉10固定在链轮组9的一侧,通过拨叉10 沿着链轮轴向的直线往复运动,将链条6调整到不同的链轮上,实现传动比的改变,进而实现速度的调节,特别的是,链轮组9的直径≤大链轮8的直径,优选为链轮组9的直径≤大链轮8的直径的一半,其中本实施例中,链轮组9的直径等于大链轮8直径的三分之一。
具体实施例二
在实施例一的基础上,叶轮的叶片303上设有若干贯穿叶面的镂空槽304,叶片转动时,阻尼液从镂空槽304中穿过。
具体实施例三
在实施例一的基础上,叶轮与转轴301的轴线成角度A。角度A范围为10°至35°,优选为20°至30°,本实施例中优选为25度。
具体实施例四
在实施例一的基础上,如图5所示连接器替换为连杆601,连杆601分别与大轮盘4和链轮组9铰接在一起,形成双摇杆机构,大轮盘4的转动通过连杆601传递给链轮组9。
具体实施例五
一种太空漫步机用阻尼控制装置,包括阻尼装置和速度调节装置,
— 阻尼装置,包括阻尼器3和安装在阻尼器壳体302中的叶轮,叶轮的叶片303固定在转轴301上,并且在301的圆周上均布,阻尼器3的中心设有速度调节装置5,速度调节装置5通过连接器与大轮盘4偏心的连接在一起,同时太空漫步机的脚踏板2也偏心的连接在大轮盘4上,脚踏板2通过大轮盘4带动连接器来驱动叶轮转动,阻尼器壳体302中填充有阻尼液,阻尼液采用剪切增稠液体STF。
— 速度调节装置5,设于连接器和阻尼器壳体之间,优选为阻尼器3的旋转中心线上,连接器用于连接大轮盘4和速度调节装置5,将大轮盘4的旋转运动传递给速度调节装置。
如图4所示,速度调节装置5包括离合器501,齿轮组502,齿轮组芯轴503,转轴固定板504,离合器摆杆505,芯轴滑动齿轮固定杆506,芯轴齿轮507和芯轴连接器508,
其中,齿轮组芯轴503与转轴301通过芯轴连接器508固定在一起,并与转轴301同轴,芯轴固定板504上设有铰接点,连杆601偏心的铰接在铰接点上,当实施例四中传动结构转动时,芯轴固定板504在脚踏板的驱动下转动,此时芯轴滑动齿轮固定杆506将芯轴齿轮50拨到齿轮组502对应的齿轮上,实现不同传动比的切换,此外手动摇动离合器摆杆505可以将齿轮组502通过离合器离合器501与芯轴齿轮507脱开,实现脚踏板的无阻力运动。
前述内容已经宽泛地概述出各个实施例的一些方面和特征,其应该被解释为仅是各个潜在应用的说明。其他有益结果可以通过以不同方式应用公开的信息或通过组合公开的实施例的各个方面来获得。在由权利要求限定的范围的基础上,结合附图地参考对示例性实施例的具体描述可获得其他方面和更全面的理解。
此外本发明还公开了以下技术方案:
方案一:
速度调节装置包括齿轮组,相邻齿轮齿数成线性递增,所述齿轮组中的齿轮同轴的固定在所述转轴上,齿轮组的外侧套设有齿圈,齿圈可沿着齿轮组的轴向移动,与不同齿数的齿轮配合形成不同的速比,调节叶轮的速度。
方案二:
叶轮在转轴上成若排布置,每排的有若干个叶轮且均布在转轴的圆周上。
方案三:
转轴与阻尼器壳体密封且活动连接在一起,形成的密闭腔体内填充有阻尼液,所述叶轮沉浸在阻尼液内。
上述实施例对本发明做了详细说明。当然,上述说明并非对本发明的限制,本发明也不仅限于上述例子,相关技术人员在本发明的实质范围内所作出的变化、改型、添加或减少、替换,也属于本发明的保护范围。
- 一种太空漫步机用阻尼控制装置
- 一种电磁阻尼太空漫步机