一种居家的人工智能机器人自动进行腿部按摩辅助装置
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及人工智能机器人领域,具体为一种居家的人工智能机器人自动进行腿部按摩辅助装置。
背景技术
在目前科技快速发展的过程中,人工智能的雏形已经开始形成,人工智能机器人也开始出现在人们的视野中,通过使用智能机器人可以有效的进行一些劳动强度过大的工作处理,从而减少人力的消耗同时也降低了成本的消耗,增加人们生活的便利性。
但是现如今在进行人们居家按摩时,人工按摩的力度无法达到恒定的值,导致按摩效果不佳,同时在按摩过程中无法有效的进行调控按摩力度,使得人们在过程中无法达到自己所期望的舒适感,且普通机器人在进行按摩时可能会因为力度过大导致人体损伤,无法达到智能化的调节。
于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种居家的人工智能机器人自动进行腿部按摩辅助装置,以期达到更具有更加实用价值性的目的。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种居家的人工智能机器人自动进行腿部按摩辅助装置,具备自动对人体腿部进行按摩以及自动调节按摩力度的优点,解决了人工进行按摩力度不稳定导致体验感非常差以及普通机器按摩力度过大导致人体按摩损伤的问题。
(二)技术方案
为实现自动对人体腿部进行按摩以及自动调节按摩力度的目的,本发明提供如下技术方案:一种居家的人工智能机器人自动进行腿部按摩辅助装置,包括机器壳体,所述机器壳体的外部活动连接有调阻机构,所述机器壳体的内部固定连接有通电机构,所述机器壳体的表面固定连接有按摩机构,所述按摩机构的底部活动连接有调动机构。
进一步的,所述调阻机构包括按压块,按压块的表面活动连接有调阻杆,调阻杆远离按压块的一端活动连接有拉动阻片杆,按压块的表面通过机器壳体表面开设的滑槽与机器壳体的表面活动连接,拉动阻片杆的表面通过机器壳体内部开设的滑槽与机器壳体的内部活动连接。
进一步的,所述通电机构包括支撑座,支撑座的右侧活动连接有下滑杆,下滑杆远离支撑座的一端活动连接有支撑滑块,支撑滑块的表面通过机器壳体内部开设的滑槽与机器壳体的内部活动连接,支撑滑块的左侧固定连接有滑块簧,滑块簧远离支撑滑块的一端与机器壳体的内部固定连接,支撑座的顶部固定连接有运动触头,机器壳体的内部固定连接有固定触点。
进一步的,所述按摩机构包括往复按摩块,往复按摩块的顶部固定连接有按摩连杆,按摩连杆远离往复按摩块的一端活动连接有按摩摆杆,按摩连杆的表面固定连接有拉伸簧,拉伸簧远离按摩连杆的一端与按摩摆杆的表面固定连接,按摩摆杆远离按摩连杆的一端活动连接有按摩轮杆。
进一步的,所述调动机构包括电阻调片,电阻调片的内部贯穿有调动电阻圈,电阻调片的底部固定连接有滑片簧,滑片簧远离电阻调片的一端与机器壳体的内部固定连接,机器壳体的内部转动连接有主动转动轮,主动转动轮的表面活动连接固定线圈板,固定线圈板的内部固定连接有电流圈,主动转动轮的内部活动连接有永磁球,电流圈通电后所带磁性与永磁球所带磁性相异,永磁球的顶部固定连接有往复离心杆,永磁球的底部固定连接有离心簧,离心簧远离永磁球的一端与主动转动轮的内部固定连接。
进一步的,所述拉动阻片杆远离调阻杆的一端与电阻调片的表面固定连接,往复离心杆远离永磁球的一端与往复按摩块的底部活动连接,运动触头的表面通过通电线与主动转动轮的内部固定连接。
(三)有益效果
与现有技术相比,本发明提供了一种居家的人工智能机器人自动进行腿部按摩辅助装置,具备以下有益效果:
1、该居家的人工智能机器人自动进行腿部按摩辅助装置,通过当人们坐于支撑座上后,此时支撑座向下进行推动下滑杆,下滑杆的向内摆动进行推动支撑滑块向右运动进行支撑,同时带动运动触头向内运动与固定触点进行接触,此时进行内部通电,从而达到内部稳定通电进行运行的功能,在通电后此时主动转动轮开始进行转动,主动转动轮的转动由于永磁球未处于圆心处从而带动往复离心杆进行往复运动,往复离心杆的往复运动带动往复按摩块进行上下的往复运动,往复按摩块的运动带动按摩连杆进行上下往复运动,进而带动按摩摆杆进行往复摆动,按摩摆杆的往复摆动带动按摩轮杆进行左右的往复运动,从而达到自动对腿部进行按摩的功能。
2、该居家的人工智能机器人自动进行腿部按摩辅助装置,通过当人们需要进行增加按摩力度时,此时脚部向下进行挤压按压块,按压块收到挤压后向下进行运动,按压块的向下运动通过调阻杆的摆动带动拉动阻片杆向上运动,此时拉动阻片杆的向上运动进行改变调动电阻圈的阻值,使得通过电流圈的电流进行改变,电流圈的电流增大使得电流圈的磁性进行增强,电流圈的磁性增强后当永磁球运动至电流圈的位置时由于磁场的作用增加了永磁球的离心距离,从而增加了往复离心杆向前的运动距离,增加了按摩轮杆向左运动的距离,从而达到自动进行调控按摩力度的功能。
附图说明
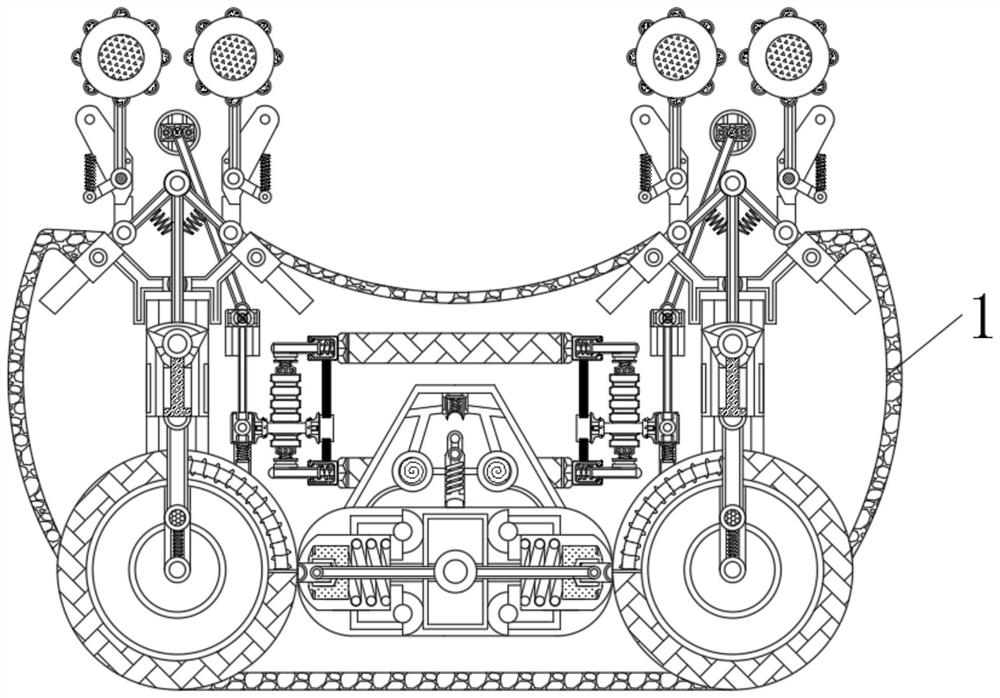
图1为本发明机器壳体结构示意图;
图2为本发明调阻杆结构示意图;
图3为本发明支撑座结构示意图;
图4为本发明往复按摩块结构示意图;
图5为本发明主动转动轮结构示意图。
图中:1、机器壳体;2、调阻机构;21、按压块;22、调阻杆;23、拉动阻片杆;3、通电机构;31、支撑座;32、下滑杆;33、支撑滑块;34、运动触头;35、固定触点;4、按摩机构;41、往复按摩块;42、按摩连杆;43、按摩摆杆;44、按摩轮杆;5、调动机构;51、电阻调片;52、调动电阻圈;53、电流圈;54、永磁球;55、主动转动轮;56、固定线圈板;57、往复离心杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一:
请参阅图1和图3和图4,一种居家的人工智能机器人自动进行腿部按摩辅助装置,包括机器壳体1,机器壳体1的外部活动连接有调阻机构2,机器壳体1的内部固定连接有通电机构3,机器壳体1的表面固定连接有按摩机构4,按摩机构4的底部活动连接有调动机构5。
当人们坐于支撑座31上后,此时支撑座31向下进行推动下滑杆32,下滑杆32的向内摆动进行推动支撑滑块33向右运动进行支撑,同时带动运动触头34向内运动与固定触点35进行接触,此时进行内部通电,从而达到内部稳定通电进行运行的功能,在通电后此时主动转动轮55开始进行转动,主动转动轮55的转动由于永磁球54未处于圆心处从而带动往复离心杆57进行往复运动,往复离心杆57的往复运动带动往复按摩块41进行上下的往复运动,往复按摩块41的运动带动按摩连杆42进行上下往复运动,进而带动按摩摆杆43进行往复摆动,按摩摆杆43的往复摆动带动按摩轮杆44进行左右的往复运动,从而达到自动对腿部进行按摩的功能。
进一步的,通电机构3包括支撑座31,支撑座31的右侧活动连接有下滑杆32,下滑杆32远离支撑座31的一端活动连接有支撑滑块33,支撑滑块33的表面通过机器壳体1内部开设的滑槽与机器壳体1的内部活动连接,支撑滑块33的左侧固定连接有滑块簧,滑块簧远离支撑滑块33的一端与机器壳体1的内部固定连接,支撑座31的顶部固定连接有运动触头34,机器壳体1的内部固定连接有固定触点35。
进一步的,按摩机构4包括往复按摩块41,往复按摩块41的顶部固定连接有按摩连杆42,按摩连杆42远离往复按摩块41的一端活动连接有按摩摆杆43,按摩连杆42的表面固定连接有拉伸簧,拉伸簧远离按摩连杆42的一端与按摩摆杆43的表面固定连接,按摩摆杆43远离按摩连杆42的一端活动连接有按摩轮杆44。
实施例二:
请参阅图2和图5,一种居家的人工智能机器人自动进行腿部按摩辅助装置,包括机器壳体1,机器壳体1的外部活动连接有调阻机构2,机器壳体1的内部固定连接有通电机构3,机器壳体1的表面固定连接有按摩机构4,按摩机构4的底部活动连接有调动机构5。
当人们需要进行增加按摩力度时,此时脚部向下进行挤压按压块21,按压块21收到挤压后向下进行运动,按压块21的向下运动通过调阻杆22的摆动带动拉动阻片杆23向上运动,此时拉动阻片杆23的向上运动进行改变调动电阻圈52的阻值,使得通过电流圈53的电流进行改变,电流圈53的电流增大使得电流圈53的磁性进行增强,电流圈53的磁性增强后当永磁球54运动至电流圈53的位置时由于磁场的作用增加了永磁球54的离心距离,从而增加了往复离心杆57向前的运动距离,增加了按摩轮杆44向左运动的距离,从而达到自动进行调控按摩力度的功能。
进一步的,调阻机构2包括按压块21,按压块21的表面活动连接有调阻杆22,调阻杆22远离按压块21的一端活动连接有拉动阻片杆23,按压块21的表面通过机器壳体1表面开设的滑槽与机器壳体1的表面活动连接,拉动阻片杆23的表面通过机器壳体1内部开设的滑槽与机器壳体1的内部活动连接。
进一步的,调动机构5包括电阻调片51,电阻调片51的内部贯穿有调动电阻圈52,电阻调片51的底部固定连接有滑片簧,滑片簧远离电阻调片51的一端与机器壳体1的内部固定连接,机器壳体1的内部转动连接有主动转动轮55,主动转动轮55的表面活动连接固定线圈板56,固定线圈板56的内部固定连接有电流圈53,主动转动轮55的内部活动连接有永磁球54,电流圈53通电后所带磁性与永磁球54所带磁性相异,永磁球54的顶部固定连接有往复离心杆57,永磁球54的底部固定连接有离心簧,离心簧远离永磁球54的一端与主动转动轮55的内部固定连接。
进一步的,拉动阻片杆23远离调阻杆22的一端与电阻调片51的表面固定连接,往复离心杆57远离永磁球54的一端与往复按摩块41的底部活动连接,运动触头34的表面通过通电线与主动转动轮55的内部固定连接。
工作原理:当人们坐于支撑座31上后,此时支撑座31向下进行推动下滑杆32,下滑杆32的向内摆动进行推动支撑滑块33向右运动进行支撑,同时带动运动触头34向内运动与固定触点35进行接触,此时进行内部通电,从而达到内部稳定通电进行运行的功能。
在通电后此时主动转动轮55开始进行转动,主动转动轮55的转动由于永磁球54未处于圆心处从而带动往复离心杆57进行往复运动,往复离心杆57的往复运动带动往复按摩块41进行上下的往复运动,往复按摩块41的运动带动按摩连杆42进行上下往复运动,进而带动按摩摆杆43进行往复摆动,按摩摆杆43的往复摆动带动按摩轮杆44进行左右的往复运动,从而达到自动对腿部进行按摩的功能。
当人们需要进行增加按摩力度时,此时脚部向下进行挤压按压块21,按压块21收到挤压后向下进行运动,按压块21的向下运动通过调阻杆22的摆动带动拉动阻片杆23向上运动,此时拉动阻片杆23的向上运动进行改变调动电阻圈52的阻值,使得通过电流圈53的电流进行改变,电流圈53的电流增大使得电流圈53的磁性进行增强,电流圈53的磁性增强后当永磁球54运动至电流圈53的位置时由于磁场的作用增加了永磁球54的离心距离,从而增加了往复离心杆57向前的运动距离,增加了按摩轮杆44向左运动的距离,从而达到自动进行调控按摩力度的功能。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种居家的人工智能机器人自动进行腿部按摩辅助装置
- 山形手动或自动伸缩装置、小腿部山形按摩装置及按摩椅