一种大视场的高清智能交通监控镜头
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及光学成像设备技术领域及光电显示技术领域,具体为一种用于智能交通安防监控系统的能够识别中远距离的大视场高清智能交通监控镜头。
背景技术
随着社会的发展,尤其是科学技术的进步,使得社会得到了长足发展,人们的生活质量得质的提升。社会公共交通的发展,尤其是私家车辆的大量普及,对于社会交通管理提出了越来越高要求,而智慧管理的智能交通系统,则发展着越来越重要的作用。
近年来,随着社会经济的快速发展,道路车流量迅猛增长,公路运输变的越来越繁忙。基于交通管理及智慧城市、智慧交通的现状需求,智能交通安防监控镜头也蓬勃兴起并以较快的速度发展。而市面上的智能交通安防监控镜头多为定焦标清系列,对目标的识别能力较差,对城市交通管理带来诸多不变,亟需大孔径,大像面的高清智能交通监控镜头。
发明内容
为了克服上述现有技术中存在的的不足,本发明提供了一种能够实现低成本、大相对孔径、大像面、分辨率达八百万像素以及高低温不虚焦的高成像质量效果的大视场的高清智能交通监控镜头。
本发明的目的是这样实现的:
一种大视场的高清智能交通监控镜头,包括镜筒本体,所述镜筒本体内从物方到像方依次设有正光焦度前透镜组、正光焦度后透镜组,所述正光焦度前透镜组由正光焦度第一透镜、负光焦度第二透镜、负光焦度第三透镜、负光焦度第四透镜与正光焦度第五透镜组成的第一胶合透镜、正光焦度第六透镜、正光焦度第七透镜组成;正光焦度前透镜组第一胶合透镜与正光焦度第六透镜、正光焦度第七透镜搭配;正光焦度后透镜组由正光焦度第八透镜、负光焦度第九透镜、正光焦度第十透镜、正光焦度第十一透镜组成;通过压缩正光焦度后透镜组尺寸,使整组镜片能够直接塞进C接口内部,最大限度的压缩了后焦尺寸,提高像质,增大画幅;
所述正光焦度第一透镜通过内压圈固定在镜筒本体中,该第一透镜采用正光焦度,可有效矫正畸变,避免高低温时镜片表面出现雾气;所述正光焦度第十一透镜通过外压圈固定,所述正光焦度前透镜组与正光焦度后透镜组之间设有17mm手动光圈模组;
所述正光焦度第一透镜为弯月透镜,所述正光焦度第一透镜通过内压圈固定在镜筒本体内;
所述负光焦度第二透镜为弯月透镜,所述正光焦度第一透镜与正光焦度第二透镜之间设有第一隔圈;
所述负光焦度第三透镜为弯月透镜,所述负光焦度第四透镜与正光焦度第五透镜为第一胶合透镜,所述负光焦度第三透镜与第一胶合透镜之间安装第二隔圈;
所述正光焦度第六透镜为双凸透镜,所述正光焦度第五透镜与正光焦度第六透镜之间安装第三隔圈;
所述正光焦度第七透镜为双凸透镜,所述正光焦度第六透镜与正光焦度第七透镜之间安装第四隔圈;
所述正光焦度后透镜组正光焦度第十一透镜通过外压圈固定,正光焦度第十透镜与正光焦度第十一透镜间设有第六隔圈;正光焦度第八透镜与负光焦度第九透镜为第二胶合透镜,第二胶合透镜与正光焦度第十透镜间设有第五隔圈;
所述正光焦度前透镜组的正光焦度第一透镜后表面顶点至负光焦度第二透镜前表面顶点的距离为0.3~0.5mm;
所述正光焦度前透镜组的负光焦度第二透镜后表面顶点至负光焦度第三透镜的前表面顶点的距离为10.4~10.6mm;
所述正光焦度前透镜组的负光焦度第三透镜后表面顶点至负光焦度第四透镜的前表面顶点的距离为7.7~7.8mm;
所述正光焦度前透镜组的正光焦度第五透镜后表面顶点至正光焦度第六透镜的前表面顶点的距离为0.1~0.2mm;
所述正光焦度前透镜组的正光焦度第六透镜后表面顶点至正光焦度第七透镜的前表面顶点的距离为0.1~0.2mm;
所述正光焦度前透镜组的第七透镜后表面顶点与正光焦度后透镜组的正光焦度第八透镜前表面顶点的距离为14mm;
所述正光焦度后透镜组的负光焦度第九透镜后表面顶点与正光焦度第十透镜前表面顶点的距离为1mm;
所述正光焦度后透镜组的正光焦度第十透镜后表面顶点与正光焦度第十一透镜前表面顶点的距离为2mm;
所述的大视场的高清智能交通监控镜头的透镜参数如下:
积极有益效果:本发明公开了一种大视场的高清智能交通监控镜头,有效焦距f=12 mm,最大相对孔径数F/#=1.2,光学系统总长小于110mm,像面尺寸1英寸,分辨率为800万像素,手动光圈以及高低温不虚焦。与现有技术相比,该一种大视场高清智能交通监控镜头方案通过选用低成本镜片材料、不同光焦度镜片搭配、光阑靠后及压缩后组尺寸等措施,实现了低成本、大相对孔径、大像面、手动光圈、分辨率达八百万像素以及高低温不虚焦的高成像质量效果,为智能交通监控系统数据采集提供有效支撑。
附图说明
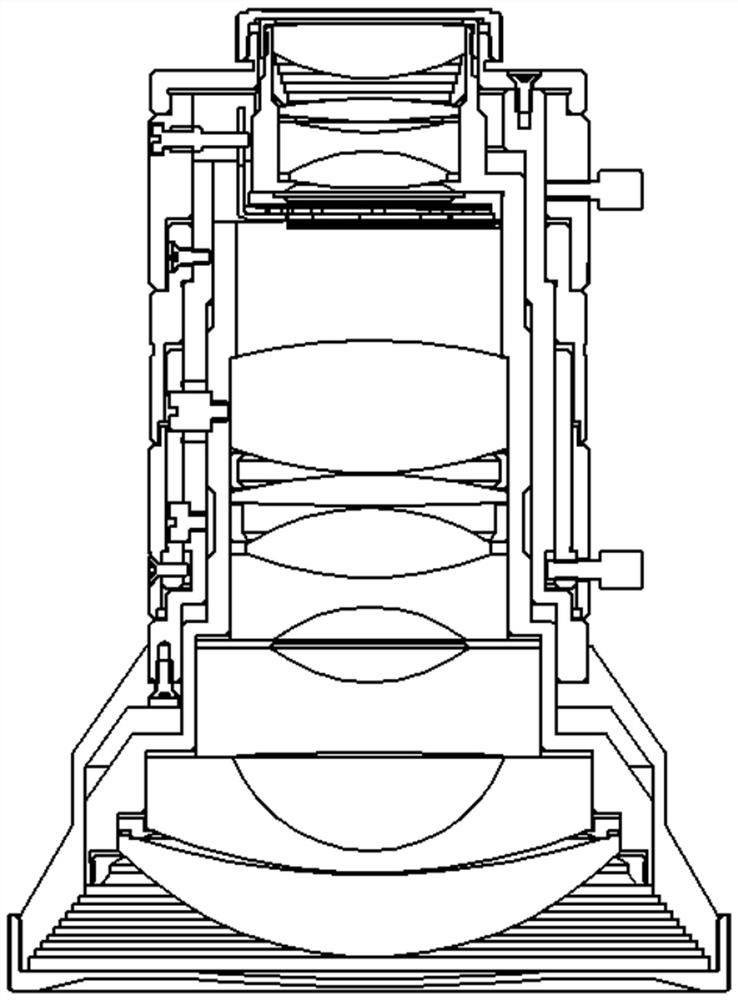
图1为本发明的整体结构示意图;
图2为本发明光学系统结构示意图;
图3为本发明MTF(调制传递函数)示意图;
图4为本发明场曲和畸变示意图;
图5为本发明光斑图;
图6为本发明波像差图;
图中为:第一透镜G1、第二透镜G2、第三透镜G3、第四透镜G4、第五透镜G5、第六透镜G6、第七透镜G7、第八透镜G8、第九透镜G9、第十透镜G10、第十一透镜G11。
具体实施方式
下面结合附图及具体实施例,对本发明做进一步的说明:
实施例
如图1-2所示,一种大视场的高清智能交通监控镜头,包括镜筒本体,所述镜筒本体内从物方到像方依次设有正光焦度前透镜组、正光焦度后透镜组,所述正光焦度前透镜组由正光焦度第一透镜、负光焦度第二透镜、负光焦度第三透镜、负光焦度第四透镜与正光焦度第五透镜组成的第一胶合透镜、正光焦度第六透镜、正光焦度第七透镜组成;正光焦度前透镜组第一胶合透镜与正光焦度第六透镜、正光焦度第七透镜搭配,有效的减少了轴上球差,降低装配敏感度;正光焦度后透镜组由正光焦度第八透镜、负光焦度第九透镜、正光焦度第十透镜、正光焦度第十一透镜组成;通过压缩正光焦度后透镜组尺寸,使整组镜片能够直接塞进C接口内部,最大限度的压缩了后焦尺寸,提高像质,增大画幅;
所述正光焦度第一透镜通过内压圈固定在镜筒本体中,该第一透镜采用正光焦度,可有效矫正畸变,避免高低温时镜片表面出现雾气;所述正光焦度第十一透镜通过外压圈固定,所述正光焦度前透镜组与正光焦度后透镜组之间设有17mm手动光圈模组;光圈靠近后组,可有效减少后组尺寸;
所述正光焦度第一透镜为弯月透镜,所述正光焦度第一透镜通过内压圈固定在镜筒本体内;
所述负光焦度第二透镜为弯月透镜,所述正光焦度第一透镜与正光焦度第二透镜之间设有第一隔圈;
所述负光焦度第三透镜为弯月透镜,所述负光焦度第四透镜与正光焦度第五透镜为第一胶合透镜,所述负光焦度第三透镜与第一胶合透镜之间安装第二隔圈;
所述正光焦度第六透镜为双凸透镜,所述正光焦度第五透镜与正光焦度第六透镜之间安装第三隔圈;
所述正光焦度第七透镜为双凸透镜,所述正光焦度第六透镜与正光焦度第七透镜之间安装第四隔圈;
所述正光焦度后透镜组正光焦度第十一透镜通过外压圈固定,正光焦度第十透镜与正光焦度第十一透镜间设有第六隔圈;正光焦度第八透镜与负光焦度第九透镜为第二胶合透镜,第二胶合透镜与正光焦度第十透镜间设有第五隔圈;
所述正光焦度前透镜组的正光焦度第一透镜后表面顶点至负光焦度第二透镜前表面顶点的距离为0.4mm;所述正光焦度前透镜组的负光焦度第二透镜后表面顶点至负光焦度第三透镜的前表面顶点的距离为10.4mm;所述正光焦度前透镜组的负光焦度第三透镜后表面顶点至负光焦度第四透镜的前表面顶点的距离为7.7mm;所述正光焦度前透镜组的正光焦度第五透镜后表面顶点至正光焦度第六透镜的前表面顶点的距离为0.2mm;所述正光焦度前透镜组的正光焦度第六透镜后表面顶点至正光焦度第七透镜的前表面顶点的距离为0.2mm;所述正光焦度前透镜组的第七透镜后表面顶点与正光焦度后透镜组的正光焦度第八透镜前表面顶点的距离为14mm;所述正光焦度后透镜组的负光焦度第九透镜后表面顶点与正光焦度第十透镜前表面顶点的距离为1mm;所述正光焦度后透镜组的正光焦度第十透镜后表面顶点与正光焦度第十一透镜前表面顶点的距离为2mm。
所述的一种大视场的高清智能交通监控镜头的透镜参数如下:
如图3-6所示,本发明有效焦距f=12 mm,最大相对孔径数F/#=1.2,光学系统总长小于110mm,像面尺寸1英寸,分辨率为800万像素,手动光圈以及高低温不虚焦。与现有技术相比,该一种大视场高清智能交通监控镜头方案通过选用低成本镜片材料、不同光焦度镜片搭配、光阑靠后及压缩后组尺寸等措施,实现了低成本、大相对孔径、大像面、手动光圈、分辨率达八百万像素以及高低温不虚焦的高成像质量效果,为智能交通监控系统数据采集提供有效支撑。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
- 一种大视场的高清智能交通监控镜头
- 一种无热化的高清智能交通监控镜头