一种速度优化和前馈补偿相结合的机器人运动控制方法
文献发布时间:2023-06-19 12:13:22
技术领域
本发明属于工业机器人的运动控制领域,具体涉及一种速度优化和前馈补偿相结合的机器人运动控制方法。
背景技术
机器人运动控制系统是工业机器人的重要组成部分,决定着工业机器人的运动方式和作业性能。复杂多变的工业应用对工业机器人的运动控制系统提出了较高的要求,一方面机器人末端执行器必须按照一定工艺要求运动,对其末端位姿点,速度和加速度都有要求。另一方面运动控制系统直接决定工业机器人的运动方式、作业精度和使用寿命。高效的生产要求促使工业机器人提升运动速度和加速度,这也使得工业机器人的振动和空间误差问题更为突出。
在工业应用中,关节型机器人(也被称为机械臂)最为常见,其特点在于模仿人的手部构造,具有较长的运动机构,包含多个串联的运动链和长连杆臂,使得工业机器人更容易受振动和空间误差的影响。一个良好的运动控制系统不仅可以提升工业机器人的作业精度和效率,还能保证良好的运动稳定性和减少机械磨损,而其关键在于两种先进的控制技术,一是速度优化,二是伺服误差补偿。
伺服误差补偿主要分成两种,一种是反馈补偿,另一种是前馈补偿。反馈补偿是根据伺服电机的反馈信息和输入信号的对比差异进行补偿的方法。前馈补偿是根据伺服运动机构的传递函数对实际轨迹的空间误差进行预测,并通过修改理论轨迹达到减少空间误差的目的。前者的补偿具有滞后性,不能及时弥补机器人的空间误差。后者的补偿具有超前性,对减少机器人空间误差的效果更好。同时前馈补偿并不能取代反馈补偿,前馈补偿是在反馈补偿的基础上对机器人空间精度的进一步提升。
传统的运动控制系统存在着一个两难的困境,伺服前馈补偿是在速度优化之后做的,但是伺服前馈补偿的结果又会影响速度优化的结果,使得速度优化不再是最优解。假如调换两者的顺序,结果会更糟,因为速度优化会改变机器人运行时的动态特性,从而导致伺服补偿完全失效。
中国发明专利(CN201510826995.1)提出了一种机器人控制系统轨迹加减速插补算法,采用多次样条插补作为粗插补,再采用数字积分法以及等时间插补对轨迹做了精插补,但此方法只对机器人运动控制中的运动速度做了优化,没有考虑伺服的误差,不能完全保证轨迹的实时精度。本发明将提供一种速度优化和前馈补偿相结合的机器人运动控制方法,同时考虑运动速度的连续性和伺服误差,有效地提升机器人轨迹的运动精度和平滑性。
发明内容
针对现有技术存在的问题,本发明拟提供一种速度优化和前馈补偿相结合的机器人运动控制方法,将机器人运动控制系统分成了五个模块:指令解析、预规划、轨迹优化、轨迹离散、实时插补。先将机器人轨迹指令表示成参数曲线的形式,利用控制点和参数的基函数控制实际轨迹的位姿,接着对参数进行速度规划,然后在已有速度函数的参数轨迹的基础上通过修改控制点进行平顺优化和前馈补偿,最后根据弦高差和速度变化量进行轨迹离散,并优化离散点处的速度,其目的在于改进优化传统的机器人运动控制系统,由此解决速度优化和前馈补偿相互影响的技术问题。
本发明为解决现有技术中存在的问题采用的技术方案如下:
一种速度优化和前馈补偿相结合的机器人运动控制方法,其特征在于,包括如下步骤:
S1、输入机器人轨迹指令,对机器人轨迹指令进行解析,获取轨迹起终点位姿信息、速度阈值、加速度阈值,并保存为统一格式的轨迹数据
式(1)中
S3、基于速度参数
S4、对步骤S2得到的参数轨迹
S5、建立机构的误差预测模型,基于已得到的带速度函数的参数轨迹
S6、将步骤S5得到的优化轨迹进行基于弦高差和速度变化量的轨迹离散,保证离散后的轨迹与步骤S5得到的轨迹之间的弦高差
S7、将步骤S6得到的带速度的离散轨迹在离散点处进行速度优化,使得离散轨迹点的速度和加速度具有连续性;
S8、将步骤S7得到的离散轨迹点数据进行实时插补,得到伺服运动指令,并发送给机器人各个轴的伺服驱动器,实现机器人的运动控制。
所述步骤S2中公式(1)选择不同的基函数直接影响轨迹的连续性,为实现实际轨迹的G2或G3连续,选择三阶样条曲线作为基函数。
所述步骤S3中对参数
所述步骤S4中对控制点的优化过程为:基于步骤S2的参数轨迹公式
本发明具有如下优点:
1.本发明克服了传统机器人运动控制系统中速度优化和前馈补偿相互影响的困境,利用参数轨迹的方法,将机器人轨迹的速度规划转变成了参数的速度规划,将机器人轨迹的平顺优化和前馈补偿转变成了对控制点的优化补偿,巧妙地规避了速度优化和前馈补偿地相互影响。
2.本发明提出地机器人运动控制框架结构简单,对不同类型的机器人均可适用,并且还可以结合不同的速度规划方法、平顺优化方法、前馈补偿方法进行扩展,通用性强。
附图说明
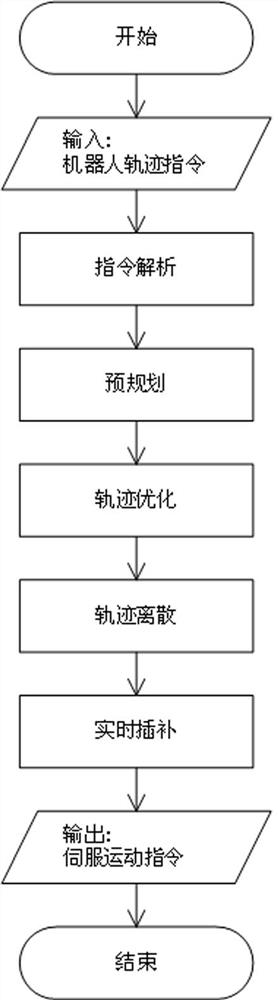
图1为本发明方法的总体流程图;
图2为参数化轨迹的平顺示意图;
图3为参数轨迹对控制点进行平顺优化的示意图;
图4为轨迹离散的示意图。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明,如图1所示,本发明的速度优化和前馈补偿相结合的机器人运动控制框架主要包含五个模块:指令解析、预规划、轨迹优化、轨迹离散、实时插补,其中1)指令解析是将机器人的轨迹指令解析并保存为统一格式的机器人轨迹数据,为后续模块的计算和优化奠定基础,指令解析可根据不同品牌的机器人进行扩展,从而使得本发明适用于不同品牌的机器人运动控制系统。2)预规划是将原始轨迹数据转换成参数轨迹,在拐点处进行初始平顺,并对参数进行速度规划,得到带初始速度函数的参数轨迹。3)轨迹优化是在预规划的基础上,对参数轨迹的控制点进行平顺优化和前馈补偿,保持原有的参数轨迹的基函数和参数的速度函数不变,得到带初始速度函数的优化轨迹。4)轨迹离散是将优化后的参数轨迹基于弦高差和速度变化量进行轨迹离散,并优化离散点处的速度,最终得到带速度的离散轨迹。5)最后一步实时插补是将带速度的离散轨迹转换成伺服运动指令,并发送给机器人的伺服驱动,实现机器人的运动控制。具体实施步骤如下:
S1、解析工业机器人的轨迹指令,获取轨迹的起终点位姿数据,速度阈值,加速度阈值,并保存为统一格式的轨迹数据
S2、将步骤S1得到的轨迹数据通过控制点
其中
S3、在步骤S2的基础上对参数
S4、对步骤S2得到的参数轨迹
如图3所示,
S5、建立机器人伺服误差预测模型,基于已得到的带速度函数的参数轨迹
S6、将步骤S5得到的优化轨迹进行基于弦高差和速度变化量的轨迹离散,如图4所示,在进行轨迹离散时,需要保证离散后的折线轨迹与步骤S5得到的轨迹之间的弦高差
S7、将步骤S6得到的带速度的离散轨迹
S8、将步骤S7得到的离散轨迹点数据进行实时插补,得到伺服运动指令,并发送给机器人各个轴的伺服驱动器,实现机器人的运动控制。
本发明主要解决传统机器人运动控制系统中速度优化和前馈补偿相互影响的问题,发明的核心思想是将机器人的轨迹转化成参数轨迹,通过控制点集合和参数进行表示,然后对参数进行速度规划,得到带速度函数的参数轨迹后,进行前馈优化,再通过修改控制点将前馈补偿应用到实际轨迹中,并且不影响原有的速度函数,最后对轨迹进行离散,并优化离散点处的速度函数,从而得到同时满足速度优化和前馈补偿的轨迹规划方案。
本发明的保护范围并不限于上述的实施例,显然,本领域的技术人员可以对本发明进行各种改动和变形而不脱离本发明的范围和精神。倘若这些改动和变形属于本发明权利要求及其等同技术的范围内,则本发明的意图也包含这些改动和变形在内。
- 一种速度优化和前馈补偿相结合的机器人运动控制方法
- 一种速度优化和前馈补偿相结合的机器人运动控制方法