一种基于多传感器的地表沉降观测方法及系统
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及地表沉降观测技术领域,尤其涉及一种基于多传感器的地表沉降观测方法及系统。
背景技术
本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
由于地壳运动以及矿藏的开采,引起地面高程发生变化,局部短期内发生较大的变化时,容易给道路、建筑物、隧道带来破坏,故需定期对地表进行沉降观测,及时采取相应措施,防止建筑物、隧道进一步损坏。
传统的地表沉降观测主要是通过以下几种手段实现:方法一是利用水准仪或全站仪对监测点进行周期性的高程变化观测;方法二是在监测点放置GPS接收机进行静态观测。从动态观测变为静态观测,能够减少人力、物力,但在监测效率以及人员的安全上仍无法改善,且通过上述两种方式只能对布设的监测点进行观测,无法获取地表的整体下沉情况。
基于上述问题,本发明提出了一种基于多传感器的地表沉降观测方法。通过此方法不仅在观测效率以及人员安全上有了很大的改观,而且还可对地表的整体情况进行监测。此外,还可更直观地展示测量区域地表的下沉状况。
目前,业内尚未出现基于多传感器进行地表沉降观测的解决方案或专利。
发明内容
为了解决上述问题,本发明提出了一种基于多传感器的地表沉降观测方法及系统,通过多传感器获取点云数据进行地表沉降观测,同时基于拍摄地表的纹理照片构建地表场景三维模型,可对地表的整体情况进行监测,还可更直观地展示测量区域地表的下沉状况。
在一些实施方式中,采用如下技术方案:
一种基于多传感器的地表沉降观测方法,包括:
通过多传感器获取监测区域多源点云数据并进行预处理;
将同一场景下不同监测点获取的多源点云数据进行拼接,得到监测区域整个场景的点云数据;
根据拼接后的点云数据坐标值,计算监测区域各处的地表沉降值。
进一步地,还包括:
利用点云数据自动化处理工具,根据所选的目标点云构建三维点云模型;
根据拍摄的监测区域地表的纹理照片对三维点云模型进行贴图及渲染,构建地表场景三维模型;
将不同时期的地表三维模型叠加在同一坐标系下,能够显示整个监测区域的地表沉降观测情况。
进一步地,利用Geomagic Studio点云数据自动化处理工具,根据所选的目标点云构建三维点云模型,具体包括:
利用AutodeskReCap工具进行点云数据格式转换,并加载到Geomagic Studio中;
对点云数据进行去噪及去除体外孤点操作;
对处理后的点云数据进行封装,使点云数据转为网格面片数据,并进行去除特征、删除多余面片处理。
进一步地,通过毫米波雷达、激光雷达和相机设备分别获取点云数据,得到多源点云数据。
进一步地,将同一场景下不同监测点获取的多源点云数据进行拼接,具体包括:
将多源点云数据转化为统一的格式;
将不同监测站点获取的点云数据转换到同一仪器坐标系下;
将所述仪器坐标系下的点云数据统一到同一测量坐标系下,基于特征点实现同一场景下多源点云数据的拼接。
进一步地,相邻两监测站点重叠区域应选取不少于设定个数的同名点,且这些同名点不在同一条直线上。
进一步地,地表点t处的沉降值等于第一次观测地表点t处的高程与第P次观测地表点t处的高程之差。
在另一些实施方式中,采用如下技术方案:
一种基于多传感器的地表沉降观测系统,包括:
点云数据获取模块,用于通过多传感器获取监测区域地表的多源点云数据并进行预处理;
点云数据拼接模块,用于将同一场景下不同监测点获取的多源点云数据进行拼接,得到监测区域整个场景的点云数据;
地表沉降计算模块,用于根据拼接后的点云数据坐标值,计算检测区域各处的地表沉降值。
在另一些实施方式中,采用如下技术方案:
一种终端设备,其包括处理器和计算机可读存储介质,处理器用于实现各指令;计算机可读存储介质用于存储多条指令,所述指令适于由处理器加载并执行上述的基于多传感器的地表沉降观测方法。
在另一些实施方式中,采用如下技术方案:
一种计算机可读存储介质,其中存储有多条指令,所述指令适于由终端设备的处理器加载并执行上述的基于多传感器的地表沉降观测方法。
与现有技术相比,本发明的有益效果是:
本发明利用激光雷达、毫米波雷达、相机等多种传感器,获取监测区内更丰富的点云数据,通过对多源点云数据进行预处理及拼接等操作,计算不同时期相同地表位置点的沉降值,同时,基于地表纹理照片完成三维模型的构建。
采用本发明方法监测地表沉降,不仅为人员的安全提供了保障,还提高了作业效率,更重要的是弥补了传统方式只能对监测点进行沉降观测的弊端,让管理者可以从各个角度了解整个测区地表沉降的情况。
附图说明
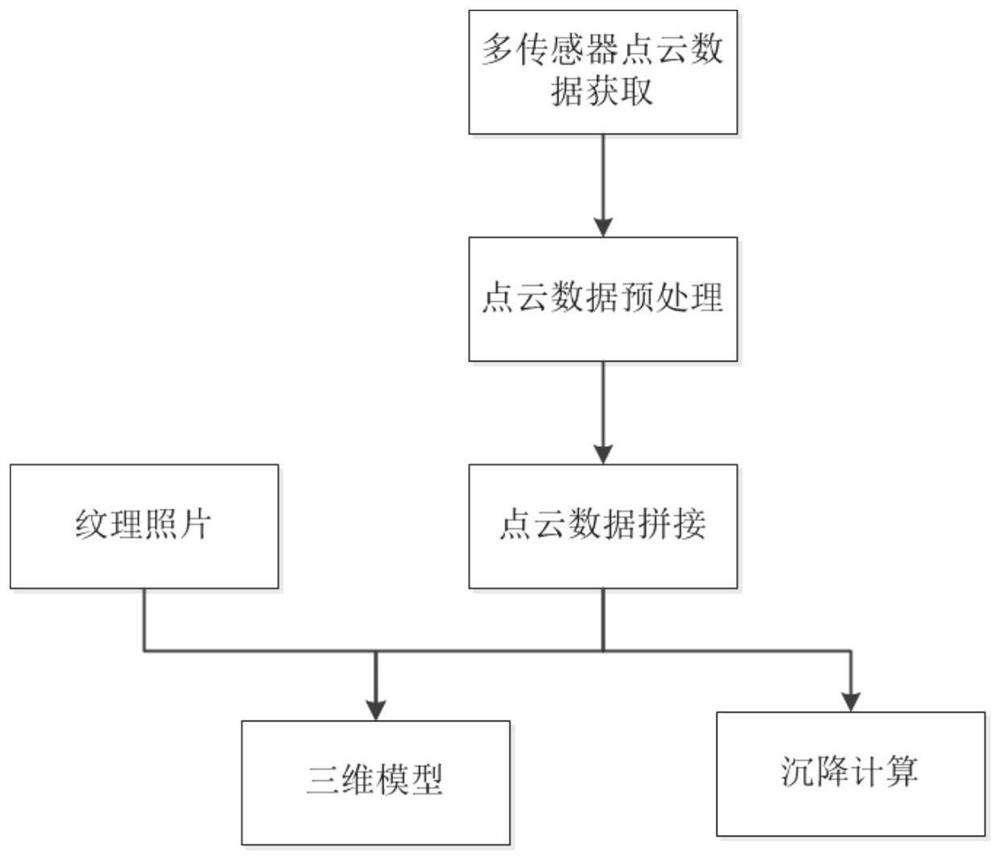
图1是本发明实施例中基于多传感器的地表沉降观测方法流程图;
图2是本发明实施例中地表场景三维模型构建过程示意图。
具体实施方式
应该指出,以下详细说明都是例示性的,旨在对本申请提供进一步的说明。除非另有指明,本发明使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
实施例一
在一个或多个实施方式中,公开了一种基于多传感器的地表沉降观测方法参照图1,包括以下过程:
步骤S101:通过多传感器获取监测区域多源点云数据并进行预处理;
激光雷达具有获取信息能力强、量测精度及准确性高的特性,但在扫描的过程中,信号易受到天气的影响。而毫米波雷达穿透雾、烟、灰尘的强力较强,但精细度不够、角度不够清晰。另外,有的区域点云数据的密度较稀疏。
本实施例中,通过激光雷达、毫米波雷达扫描监测区域,即可获取点云数据,通过相机拍摄监测区域地表,即可获取场景模型的纹理信息;但不局限于上述设备。
基于多传感器获取点云数据的方式,不仅提升了点云数据的有效性、整体性,而且还提升了量测的精度。
在数据采集的过程中,由于杂散光、背景光等一些因素会导致采集到一些无关的信息,为了获得更好质量的点云数据,需对点云数据进行去噪、平滑等预处理。本实施例采用Geomagic Studio点云数据自动化处理软件。
步骤S102:将同一场景下不同监测点获取的多源点云数据进行拼接,得到监测区域整个场景的点云数据;
具体地,点云数据拼接是指将不同数据来源、不同站点获取的点云数据,按照一定的技术标准,得到监测区整个场景的点云数据。这里需要将激光点云、毫米波点云及相机获取的点云数据进行拼接。
因地表沉降观测范围较大,需布设多监测站点扫描,首先将不同监测站点获取的点云数据转换到同一仪器坐标系下;然后将仪器坐标系下的点云数据统一到同一测量坐标系下,基于特征点实现同一场景下多源点云数据的拼接。
本实施例基于建筑物、斑马线角点等特征点进行拼接,且相邻两监测站重叠区域应选取不少于三个同名点,且三个同名点不在同一条直线上。
需要说明的是,仪器在扫描数据时,建立一个空间直角坐标系,以仪器的旋转轴为Z轴,旋转平面为xoy面,监测站点的点云数据都在此坐标系内,因此,不同测站之间的坐标系不同,需要将不同测站的点云数据转换到同一仪器坐标系。
测量坐标系是指CGCS2000、WGS84等坐标系。CGCS2000是以地球质心为原点建立的空间直角坐标系。
同名点指两监测站点的公共扫描范围内特征较明显的地物点,如斑马线的角点。选取同名点是为了两测站点云数据的拼接,提高拼接的精度及速度。
步骤S103:根据拼接后的点云数据坐标值,计算检测区域各处的地表沉降值。
由于点云数据可真实记录每个点的三维坐标,则可根据拼接后的点云数据直接计算沉降值。以初始观测值为基准点,根据公式
步骤S104:构建地表场景三维模型;
具体地,构建三维模型流程如图2所示。基于拼接后的点云数据,构建地表场景三维模型。
首先,利用AutodeskReCap工具进行点云数据格式转换,并加载到GeomagicStudio中;其次,对点云数据进行去噪、去除体外孤点等操作;然后,对处理后的点云数据进行封装,使点云数据转为网格面片数据,并进行去除特征、删除多余面片处理;最后,根据相机拍摄的地表纹理照片对点云模型进行贴图及渲染,即完成三维模型的构建。
贴图及渲染之前,也可以对图片进行裁剪、色彩及亮度处理,因为拍摄的照片由于光照等因素,会有色差,故需进行匀光处理。
依据上述方法构建不同时期地表三维模型,并将模型叠加在同一坐标系下显示,即可直观了解整个测区的地表沉降观测情况。
实施例二
在一个或多个实施方式中,公开了一种基于多传感器的地表沉降观测系统,包括:
点云数据获取模块,用于通过多传感器获取多源点云数据并进行预处理;
点云数据拼接模块,用于将同一场景下不同监测点获取的多源点云数据进行拼接,得到监测区域整个场景的点云数据;
地表沉降计算模块,用于根据拼接后的点云数据坐标值,计算检测区域各处的地表沉降值;
地表场景构建模块,用于构建地表场景三维模型。
此处需要说明的是,上述各模块的具体实现方式采用实施例一中公开的方法实现,但不限于上述实施例一所公开的内容。
上述实施例中对各个实施例的描述各有侧重,某个实施例中没有详述的部分可以参见其他实施例的相关描述。
所提出的系统,可以通过其他的方式实现。例如,以上所描述的系统实施例仅仅是示意性的,例如上述模块的划分,仅仅为一种逻辑功能划分,实际实现时,可以有另外的划分方式,例如多个模块可以结合或者可以集成到另外一个系统,或一些特征可以忽略,或不执行。
实施例三
本实施例还提供了一种终端设备,包括:一个或多个处理器、一个或多个存储器、以及一个或多个计算机程序;其中,处理器与存储器连接,上述一个或多个计算机程序被存储在存储器中,当电子设备运行时,该处理器执行该存储器存储的一个或多个计算机程序,以使电子设备执行上述实施例一所述的方法。
应理解,本实施例中,处理器可以是中央处理单元CPU,处理器还可以是其他通用处理器、数字信号处理器DSP、专用集成电路ASIC,现成可编程门阵列FPGA或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
存储器可以包括只读存储器和随机存取存储器,并向处理器提供指令和数据、存储器的一部分还可以包括非易失性随机存储器。例如,存储器还可以存储设备类型的信息。
在实现过程中,上述方法的各步骤可以通过处理器中的硬件的集成逻辑电路或者软件形式的指令完成。
实施例一中的方法可以直接体现为硬件处理器执行完成,或者用处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器、闪存、只读存储器、可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器,处理器读取存储器中的信息,结合其硬件完成上述方法的步骤。为避免重复,这里不再详细描述。
本领域普通技术人员可以意识到,结合本实施例描述的各示例的单元即算法步骤,能够以电子硬件或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。
实施例四
本实施例还提供了一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成实施例一所述的方法。
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
- 一种基于多传感器的地表沉降观测方法及系统
- 一种基于关节扭矩传感器的外力观测方法