一种车载毫米波雷达出厂检测装置及方法
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及汽车电子技术领域,特别是一种车载侧后视防撞毫米波雷达出厂检验装置及方法。
背景技术
随着汽车行业与科技的发展,车辆的安全性越来越受到大众的关注,各大汽车厂商也越来越重视汽车的安全性,许多厂商着重对汽车安全性进行研发,进而出现了许多主动、被动驾驶辅助系统。其中换道辅助系统是一种能够对车辆相邻车道来车进行预警的系统,能够有效减少在高速换道、后方车辆超车时引发的交通事故。换道辅助系统多使用毫米波雷达作为传感器,毫米波雷达具有频率高、波长短、尺寸小、穿透能力强、全天候的特点,毫米波雷达能够获得目标的距离速度与角度信息,为安全驾驶提供了一定的保障。
在现有的技术文献中,赵芝焄等人公开了一种车辆用雷达校准系统(赵芝焄,车辆用雷达校准系统,发明专利,申请号201410267921.4,申请日2014.06.17),通过发射天线向目标模拟器发射雷达信号,通过数个接收天线接收目标模拟器处的延迟信号,计算并生成数个接收天线的接收通道的相位校正值。但其并没有使用电动转台对雷达各个角度进行校准,将会导致某些角度测角不准确;而且校准时未在暗室进行,容易受到其他目标的干扰,从而导致校准失败;校准完成后也未对雷达全部功能进行核验检查,不能保证校准后的雷达是最佳状态。
国内车载侧后视防撞雷达还是一个新兴事物,许多产品技术细节都在不断探索阶段,车载侧后视防撞雷达装配完成出厂前,如何确保雷达各项参数正常,确保所有出厂的毫米波雷达系统能够正常运行,即车载毫米波雷达出厂检验问题是一个有待解决的技术问题。由于不同批次的雷达元器件间存在一定差异,并且元器件贴片过程中可能出现漏贴、错贴与虚焊等问题;并且车载毫米波雷达天线板由于加工工艺较高,加工不合格影响较大等原因,所以已经装配完成的车载毫米波雷达可能会存在一定的问题,使系统不能正常工作。如果这些产品流到市场将会影响车载侧后视防撞雷达的产品性能,并且存在一定的安全隐患。
所以,如何设计一种车载毫米波雷达出厂检验装置及方法,能够快速全面地检测即将出厂的毫米波雷达的好坏,及时发现不良件,有效阻止不良产品流入市场,确保出厂的车载毫米波雷达均为良品,已成为一项亟待解决的问题。
发明内容
为解决现有技术中存在的问题,本发明提供了一种车载毫米波雷达出厂检测装置及方法,有效地确保了出厂产品的良品率。
本发明采用的技术方案为,一种车载毫米波雷达出厂检测装置,包括:
暗室,为检测雷达提供检测环境;
运动平台,用于放置雷达,还用于接收用于出厂检验的上位机的移动指令,按照指令带雷达移动至相应位置及调整雷达的朝向及角度;
可控电源,用于给雷达供电;
CAN总线通信设备,用于将上位机的检验信息及指令传输给雷达,并接收雷达发出的报文传输给上位机;
多普勒发生器,设置于暗室内,并与运动平台及平台上的雷达间隔设置,所述多普勒发生器用于产生带速度的点目标,作为雷达所探测的目标。
安装有出厂检验上位机的电脑,分别与控制电源、转台与雷达连接。
优选的,所述暗室的长宽高分别为3m*2m*2m。
进一步地,所述暗室为使用钢制结构搭建的长方体,其短边一面设置有开口,其余面为密闭结构,暗室的内壁贴有吸收雷达波的吸波材料。
进一步地,所述可控电源放置于暗室外部,所述上位机包括电流信号采集模块,上位机通过电流信号采集模块与可控电源的电流输出端连接,通过上位机获取实时电流值,监控雷达电流是否存在异常。
进一步地,所述CAN总线通信设备放置于暗室外部,包括USB-CAN转换器,CAN端口连接雷达CAN总线,USB口端连接电脑USB端口,用于将雷达发出的报文转发给上位机,及将上位机下发的报文转发给雷达。
进一步地,所述多普勒发生器与雷达处于同一水平线。
上述技术方案的有益效果是:本发明结合多种硬件平台,设计了全方面检测待检雷达的装置,其中暗室占地小,能够有效隔绝周围环境带来的干扰;多普勒发生器能够产生特定速度的点目标,为毫米波雷达提供了一个准确“干净”的目标;运动平台通过上位机控制,实现俯仰与方位旋转,进而全方位验证雷达的测距、测角和测速是否准确;使用CAN通信设备能够准确检测雷达CAN通信的好坏,可以筛选出无法通信的雷达;可控电源能够准确获得雷达工作电流的大小,用以检测雷达电流是否在正常范围内,进而全方位检测了雷达的好坏,筛选出不良品,提升出货良品率。
本发明的另一目的在于提供一种车载毫米波雷达出厂检测方法,该方法包括以下步骤:
步骤S1:安装好雷达,并连接线束;
步骤S2:打开出厂检验上位机软件,根据雷达对应识别号,获取对应的雷达型号;
步骤S3:上位机启动,执行检测流程;
步骤S4:根据上位机显示检测通过与检测不通过,判断雷达是否符合出厂标准。
进一步地,步骤S3中,执行检测流程,具体包含以下步骤:
步骤A1:配置运动平台为0度位置,该位置正对多普勒发生器;
步骤A2:启动可控电源,上位机获取电流大小,并与上位机的配置文件中电流阈值比较,当前电流在正常范围内则进入下一步,否则返回,检测不通过;
步骤A3:上位机检测是否接收到CAN通信报文,雷达是否获得上位机报文,如果接收到正确报文则进入下一步,否则返回CAN通信错误;
步骤A4:获取雷达型号并校验,校验通过则进行下一步,校验失败则停止检测,返回雷达型号错误,检测不通过;
步骤A5:获取雷达噪声均值,比对配置文件中阈值,当前噪声均值在正常范围内则进入下一步,否则返回噪声均值超出范围;
步骤A6:获取雷达噪声峰值,比对配置文件中阈值,当前噪声峰值在正常范围内则进入下一步,否则返回噪声峰值超出范围;
步骤A7:获取多普勒目标距离、速度与幅度,比对配置文件中阈值,当前目标距离、速度与幅度在正常范围内则进入下一步,否则返回多普勒目标不在检测范围内;
步骤A8:设置雷达角度偏移为0度;
步骤A9:设置雷达工作模式为出厂标定模式,此时雷达开始上传标定数据;
步骤A10:上位机控制运动平台向左旋转50度;
步骤A11:待运动平台转动到指定位置后,记录N次雷达上传数据,并存储于文件中,N不少于5次;
步骤A12:电机向右旋转1度,并重复步骤A9与A10步骤,直至运动平台旋转到-50度停止,进入下一步;
步骤A13:上位机获取校准参数,并将校准参数下发校准参数于雷达,并获取参数下发状态,雷达正确接收参数则进入下一步,否则返回参数设置错误;
步骤A14:设置雷达为出厂检测模式,此时雷达开始上传检测数据;
步骤A15:记录N次雷达上传角度,并存储,N不少于5次;
步骤A16:运动平台向左旋转1度,并重复步骤A14,直至电机旋转到50度停止,进入下一步;
步骤A17:计算测角误差,并与配置文件比对,所计算的误差小于配置文件阈值则返回出厂检验合格,进入下一步;否则返回出厂检验不合格,测角误差过大;
步骤A18:写入雷达识别号,写入雷达标定状态;
步骤A19:电机转回零点停止。
进一步地,步骤A13中,校准参数计算方法包括:
步骤B1:检查并修正运动平台旋转角度下所有雷达上传的数据,修正方法为:
式中,Zn
步骤B2:计算法相补偿系数,具体方法为:
式中,Zne
步骤B3:使用通道补偿系数进行所有角度下的补偿,具体方法为:
Znb
式中,Znb为补偿过后的数据;
步骤B4:对所有数据进行校正表参数计算,获得单个参数数据,为:
Pn=arctan(Znbi/Znbr)
式中,Pn为生成的对应校正表参数之一;Znbi为补偿后数据的虚部;Znbr为补偿过后数据的实部。
进一步地,步骤A17中,测角误差计算方法如下:
式中,α为电机角度;β为与电机角度相对应的雷达测量角度;m为雷达数据采集次数;Err为测角误差值,k=20。
上述技术方案的有益效果是:结合多种设备,对雷达进行了全方面检测;并在过程中对雷达进行了标定,有利于提升雷达测角准确度,检测雷达标定结果的同时验证雷达性能,不仅具有操作简单、效率高的特点,而且能够大幅提升出厂雷达的良品率。
附图说明
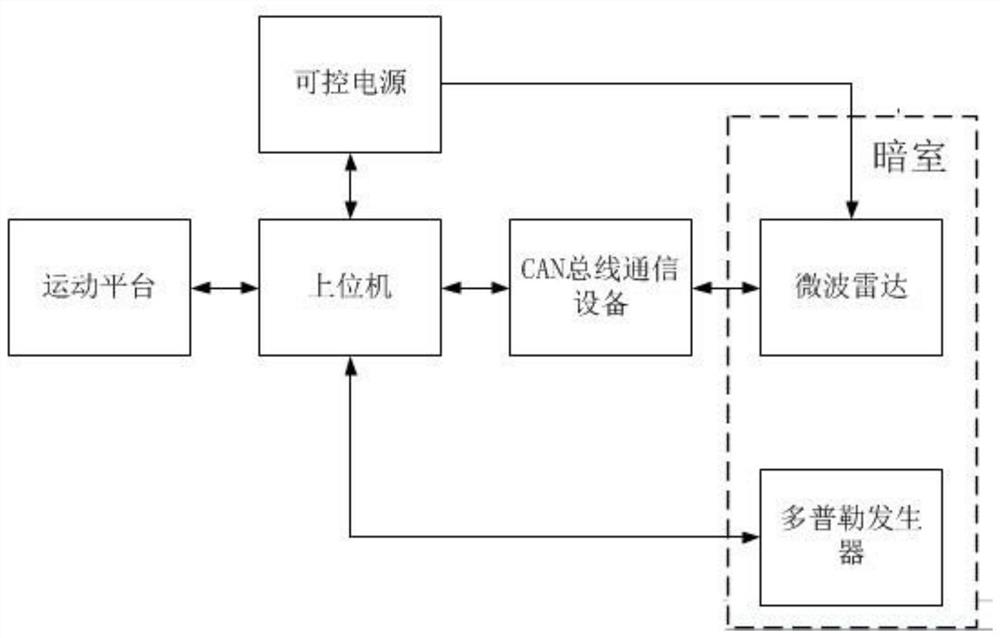
图1为本发明的车载毫米波雷达出厂检验装置的模块连接示意图;
图2为本发明的车载毫米波雷达出厂检验方法的雷达出厂检测流程图;
图3为本发明的车载毫米波雷达出厂检验方法的上位机检测流程图。
具体实施方式
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
本发明的装置的实施例:
如图1所示,车载毫米波雷达出厂检验装置,包括:
暗室,为检测雷达提供检测环境,所述暗室为使用钢制结构搭建的长方体,所述为小型暗室,暗室的长宽高分别为3m*2m*2m,其短边一面设置有开口,其余面为密闭结构,暗室的内壁贴有吸收雷达波的吸波材料,吸波材料能有效吸收雷达波,避免其发射回雷达,从而隔绝了不需要目标的干扰。
运动平台,用于放置雷达,还用于接收用于出厂检验的上位机的移动指令,按照指令带雷达移动至相应位置及调整雷达的朝向及角度,具体的,所述运动平台可以根据上位机的命令进行方位角度的旋转,以及俯仰角度旋转,进而调整雷达的朝向角度。
所述运动平台放置于小型暗室开口处,处于开口的中间位置,并且安装有可放置毫米波雷达的支架,支架位置为距离小型暗室底边1米高。
可控电源,用于给雷达供电,所述可控电源放置于暗室外部,所述上位机包括电流信号采集模块,上位机通过电流信号采集模块与可控电源的电流输出端连接,通过上位机获取实时电流值,监控雷达电流是否存在异常。
CAN总线通信设备,所述CAN总线通信设备放置于暗室外部,包括USB-CAN转换器,CAN端口连接雷达CAN总线,USB口端连接电脑USB端口,用于将雷达发出的报文转发给上位机,及将上位机下发的报文转发给雷达。
多普勒发生器,设置于暗室内,所述多普勒发生器与雷达处于同一水平线,具体置于小型暗室另一端,并与运动平台及平台上的雷达间隔设置,所述多普勒发生器用于产生带速度的点目标,作为雷达所探测的目标。
安装有出厂检验上位机的电脑,设置在小型暗室外部,运动平台旁边,用于控制电源、转台与雷达。
如图2所示,上述装置的测量方法包括以下步骤:
步骤S1:安装好雷达,并连接线束;
步骤S2:打开出厂检验上位机软件,根据雷达对应识别号,获取对应的雷达型号;
步骤S3:上位机启动,执行检测流程;
步骤S4:根据上位机显示检测通过与检测不通过,判断雷达是否符合出厂标准。
如图3所示,步骤S3中,执行检测流程,具体包含以下步骤:
步骤A1:配置运动平台为0度位置,该位置正对多普勒发生器;
步骤A2:启动可控电源,上位机获取电流大小,并与上位机的配置文件中电流阈值比较,当前电流在正常范围内则进入下一步,否则返回,检测不通过;
步骤A3:上位机检测是否接收到CAN通信报文,雷达是否获得上位机报文,如果接收到正确报文则进入下一步,否则返回CAN通信错误;
步骤A4:获取雷达型号并校验,校验通过则进行下一步,校验失败则停止检测,返回雷达型号错误,检测不通过;
步骤A5:获取雷达噪声均值,比对配置文件中阈值,当前噪声均值在正常范围内则进入下一步,否则返回噪声均值超出范围;
步骤A6:获取雷达噪声峰值,比对配置文件中阈值,当前噪声峰值在正常范围内则进入下一步,否则返回噪声峰值超出范围;
步骤A7:获取多普勒目标距离、速度与幅度,比对配置文件中阈值,当前目标距离、速度与幅度在正常范围内则进入下一步,否则返回多普勒目标不在检测范围内;
步骤A8:设置雷达角度偏移为0度;
步骤A9:设置雷达工作模式为出厂标定模式,此时雷达开始上传标定数据;
步骤A10:上位机控制运动平台向左旋转50度;
步骤A11:待运动平台转动到指定位置后,记录N次雷达上传数据,并存储于文件中,N不少于5次;
步骤A12:电机向右旋转1度,并重复步骤A9与A10步骤,直至运动平台旋转到-50度停止,进入下一步;
步骤A13:上位机获取校准参数,并将校准参数下发校准参数于雷达,并获取参数下发状态,雷达正确接收参数则进入下一步,否则返回参数设置错误,其中,获取校准参数的方法包括:
步骤B1:检查并修正运动平台旋转角度下所有雷达上传的数据,修正方法为:
式中,Zn
步骤B2:计算法相补偿系数,具体方法为:
式中,Zne
步骤B3:使用通道补偿系数进行所有角度下的补偿,具体方法为:
Znb
式中,Znb为补偿过后的数据;
步骤B4:对所有数据进行校正表参数计算,获得单个参数数据,为:
Pn=arctan(Znbi/Znbr)
式中,Pn为生成的对应校正表参数之一;Znbi为补偿后数据的虚部;Znbr为补偿过后数据的实部;
步骤A14:设置雷达为出厂检测模式,此时雷达开始上传检测数据;
步骤A15:记录N次雷达上传角度,并存储,N不少于5次;
步骤A16:运动平台向左旋转1度,并重复步骤A14,直至电机旋转到50度停止,进入下一步;
步骤A17:计算测角误差,并与配置文件比对,所计算的误差小于配置文件阈值则返回出厂检验合格,进入下一步;否则返回出厂检验不合格,测角误差过大,其中,测角误差计算方法如下:
式中,α为电机角度;β为与电机角度相对应的雷达测量角度;m为雷达数据采集次数;Err为测角误差值,k=20;
步骤A18:写入雷达识别号,写入雷达标定状态;
步骤A19:电机转回零点停止。
上述装置和方法,搭建了一个有利于毫米波雷达出厂检验的暗室,并联合多种设备全方面对毫米波雷达进行出厂检验;使用一键检测上位机,大大减少了操作难度和操作步骤;并在检测过程中对雷达进行标定,有利于提升雷达测角准确度;检测雷达标定结果的同时验证雷达性能,不仅具有操作简单、效率高的特点,而且能够大幅提升出厂雷达的良品率。
以上所述,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种车载毫米波雷达出厂检测装置及方法
- 一种车载毫米波雷达的目标检测方法及其车载雷达系统