一种基于UWB的机器人跟随系统及方法
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及机器人技术领域,尤其涉及一种基于UWB的机器人跟随系统及其方法。
背景技术
随着工业和科学技术的发展,移动机器人的研究和发展非常迅速,并逐渐进入人们的日常生活。目前服务机器人的一个典型技术是机器人跟踪,它能识别特定目标并跟随其运动,同时具有一定的人机交互功能。
现有的定位跟随技术主要有激光引导,超声波引导,GPS定位,蓝牙引导。GPS的局限性是只适用于室外,且室外高精度的定位也有一定的误差。蓝牙属于波处在2.4G这个被占用较多的波段,在这个波段中有手机信号、WiFi、无线鼠标等常见的无线设备,所以蓝牙用于通讯还好,用于测距时由于收到信号的时间受到干扰而后延导致测得的距离偏大。超声波和激光模块原理基本类似,其是可以探测到人的运动方向的,但如果在人多的场所很难实现单一目标的跟随。
此外,虽然现有技术中也有采用UWB技术实现跟随,但一般是使用两个或三个UWB基站,难以实现稳定的、全方位的跟随。
发明内容
本发明提供了一种基于UWB的机器人跟随系统及方法,用以帮助机器人实现稳定的、全方位的跟随。具体的,本发明的技术方案如下:
本发明第一方面公开了一种基于UWB的机器人跟随系统,该机器人跟随系统包括:
一种基于UWB的机器人跟随系统,其特征在于,包括四个UWB基站、控制模块、UWB标签;其中,
四个UWB基站分别与机器人的四个车轮一一对应;
UWB标签,设置于跟随目标上,用于与UWB基站进行通信;
获取到机器人的跟随模式后,控制模块结合各UWB基站与各车轮的对应关系,确定与UWB标签通信的目标UWB基站;
目标UWB基站获取与UWB标签的距离数据,并传输给控制模块;
控制模块根据距离数据,以及各UWB基站的位置关系,获取机器人跟踪的角速度和线速度,控制机器人跟随目标。
可选地,四个UWB基站中,第一UWB基站与机器人的左前轮对应;第二 UWB基站与机器人的右前轮对应;第三UWB基站与机器人的左后轮对应;第四 UWB基站与机器人的右后轮对应;且:
第一UWB基站与第四UWB基站属于同一类型基站;第二UWB基站与第三 UWB基站均属于另一类型基站。
可选地,包括:当跟随模式为后跟模式时,控制模块确定第一WUB基站和第二UWB基站为目标UWB基站,第三UWB基站和第四UWB基站为空闲基站;
当跟随模式为左跟模式时,控制模块确定第一UWB基站和第三UWB基站为目标UWB基站;第二UWB基站和第四UWB基站为空闲基站;
其中,目标基站处于工作状态,空闲基站处于空闲状态。
可选地,控制模块包括:UWB控制器和服务器;UWB控制器和服务器通过交换机通信连接;其中:
UWB控制器接收到跟随模式指令后,结合各UWB基站与各车轮对应关系,确定与UWB标签通信的目标UWB基站;
目标UWB基站获取与跟随目标的距离信息,并通过交换机传输给UWB控制器;
UWB控制器计算跟随角度,并通过交换机将距离和角度传送至服务器;
服务器根据距离和跟随角度,计算出机器人跟随的角速度和线速度,并通过交换机将角速度和线速度传输给机器人,以实现目标跟随。
可选地,跟随系统还包括避障系统,避障系统包括:超声波避障系统和/ 或3D激光雷达避障系统。
可选地,3D激光雷达避障系统,由两个激光雷达组成,两个激光雷达其中之一为16线激光雷达,用于检测前方一定范围内路面的障碍物;另一个激光雷达为32线激光雷达,用于检测车体周围360度范围内的障碍物信息。
可选地,超声波避障系统由车体周围的多个超声波传感器组成。
本发明第二方面公开了一种基于UWB的机器人跟随方法,包括以下步骤:
获取到机器人的跟随模式后,结合四个UWB基站与机器人的四个车轮的一一对应关系,确定与跟随目标上的UWB标签通信的目标UWB基站;
接收目标UWB基站获取的其与跟随目标的距离数据;
根据距离数据,以及各UWB基站的位置关系,获取机器人跟随的角速度和线速度,以实现目标的跟随。
可选地,机器人的左前轮与第一UWB基站对应;机器人的右前轮与第二 UWB基站对应;机器人的左后轮与第三UWB基站对应;机器人的右后轮的与第四UWB基站对应;且:第一UWB基站与第四UWB基站属于同一类型基站;第二UWB基站与第三UWB基站均属于另一类型基站。
可选地,获取到机器人的跟随模式后,结合各UWB基站与各车轮的对应关系,确定与跟随目标上的UWB标签通信的目标UWB基站具体包括:
当获取到的跟随模式为后跟模式时,结合各UWB基站与各车轮的对应关系,确定第一WUB基站和第二UWB基站为目标UWB基站,第三UWB基站和第四UWB基站为空闲基站;
当获取到的跟随模式为左跟模式时,结合各UWB基站与各车轮的对应关系,确定第一UWB基站和第三UWB基站为目标UWB基站;第二UWB基站和第四UWB基站为空闲基站;
其中,目标基站处于工作状态,空闲基站处于空闲状态。
本发明实施例的技术方案通过采用四个UWB基站的结构方式,提高了跟随的稳定性以及精度,解决了两个或三个UWB基站无法实现全方位稳定跟随的问题。同时通过加入多传感器信息,能简单地对障碍物进行形状大小判断以及轨迹预测,从而有效地规避障碍物解决了传统跟随方式无法智能避障的问题。
附图说明
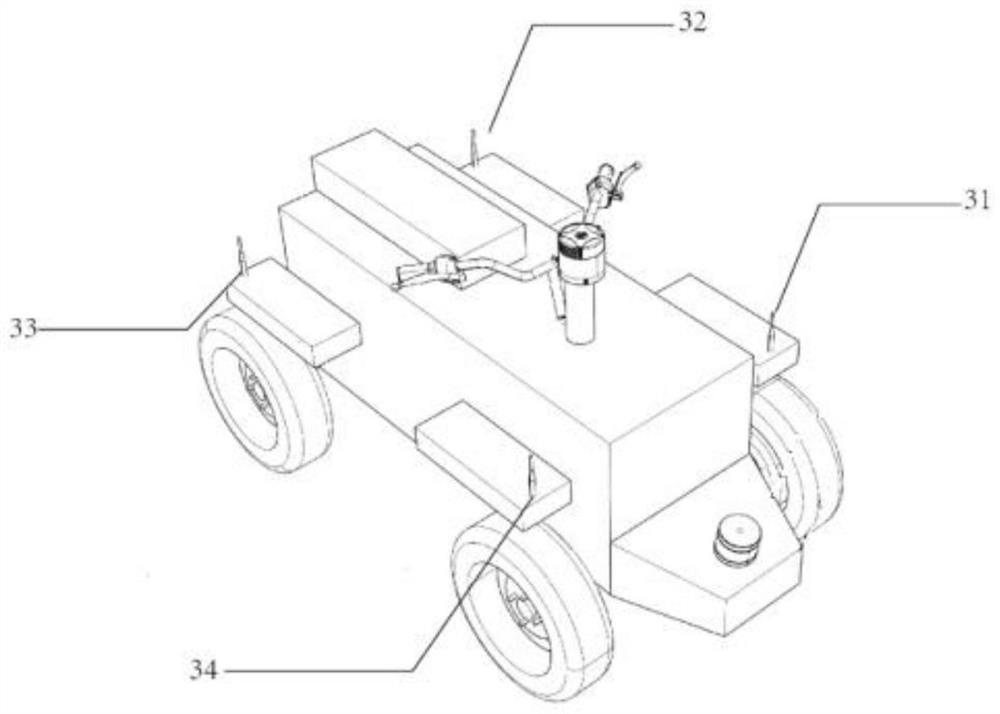
图1是本发明实施例一种基于UWB的机器人跟随系统的结构示意图;
图2是本发明实施例另一种基于UWB的机器人跟随系统的结构示意图;
图3是本发明实施例又一种基于UWB的机器人跟随系统的通信示意图;
图4是本发明实施例一种基于UWB的机器人跟随方法的流程图;
图5是本发明实施例一种UWB跟随系统实现后跟模式的计算原理图。
具体实施方式
在本发明的说明书中,具有相同名称的部件具有相同或相似的功能、位置关系和连接关系;具有相同或类似标记的信号具有相同或相似的功能、发送部件和接收部件。
为使本发明实施例的上述目的、特征和有益效果能够更为明显易懂,下面结合附图对本发明的具体实施例进行详细说明。
实施例一
本实施例公开了一种基于UWB的机器人跟随系统,如图1所示,该跟随系统包括:设置在机器人上的四个UWB基站(31、32、33、34)、控制模块、 UWB标签(设置在跟随目标上,图中未示出)。
其中,四个UWB基站分别与机器人的四个车轮一一对应,即每个车轮上方均设置一个UWB基站。四个UWB基站中,UWB基站31与机器人的左前轮对应。UWB基站34与机器人的右前轮对应。UWB基站32与机器人的左后轮对应。 UWB基站32与机器人的右后轮对应。且UWB基站31与UWB基站33属于同一类型基站,UWB基站32与UWB基站34属于另一类型基站。基于阿克曼车辆模型,移动平台由四个独立悬挂系统组成,每个独立悬挂系统都包含一个轮毂电机,共同组成了阿克曼车辆模型。
UWB标签设置于跟随目标上,接收从UWB基站发来的UWB信号,实现与 UWB基站的通信。
在获取到机器人的跟随模式后,控制模块结合各UWB基站与各车轮的对应关系,确定与UWB标签通信的目标UWB基站。目标UWB基站获取与UWB标签的距离数据,并传输给控制模块,可以实现后跟和侧跟的跟随功能。具体的,比如,当跟随模式为后跟模式时,控制模块确定UWB基站31和UWB基站 34为目标UWB基站,基站32和UWB基站33为空闲基站。当跟随模式为左跟模式时,控制模块确定基站33和UWB基站34为目标UWB基站。基站31和UWB 基站32为空闲基站。其中,目标基站处于工作状态,空闲基站处于空闲状态。
控制模块再根据距离数据以及各UWB基站的位置关系,获取机器人跟踪的角速度和线速度,控制机器人跟随目标。
本发明实施例的跟随系统通过采用四个UWB基站的结构方式,提高了跟随的稳定性以及精度,解决了两个或三个UWB基站无法实现全方位稳定跟随的问题。
实施例二
图2是本发明实施例另一种基于UWB的机器人跟随系统的结构示意图。本实施例在上述实施例一的基础上,跟随系统还包括避障系统,避障系统包括:超声波避障系统和/或3D激光雷达避障系统。服务器接收激光雷达和超声波的数据来判断车辆周边的障碍物情况,及时做出绕障、越障以及急停处理。
超声波避障系统由车体周围的多个超声波传感器组成。这些超声波传感器均匀分布在车体周边。具体的,比如超声波避障系统由车体周围12个超声波传感器组成,超声波安装位置如图2中41、42所示(其余10个超声波传感器图2没有示出)。每个超声波传感器都可以检测前方0.3-3.5m范围内的障碍物,通过障碍物出现的位置对车辆进行不同程度的减速或急停控制。
3D激光雷达避障系统,由两个激光雷达组成,两个激光雷达其中之一为 16线激光雷达,参见图2中的标号1所示,用于检测前方一定范围内路面的障碍物,若高度小于20厘米,且非动态障碍则可以直接进行越障。另一个激光雷达为32线激光雷达,参见图2中的标号1所示,用于检测车体周围360 度范围内的障碍物信息,例如:小于0.3m时急停,其余情况则根据离障碍物的距离以及车辆最大转弯半径进行及时的绕障处理,以车头中轴线为基准线,当障碍物出现在车辆的右前方时,通过控制算法控制车辆向左前方行驶,当障碍物出现在车辆的左前方时,通过控制算法控制车辆向右前方行驶,绕开障碍物后继续跟随目标。
本发明实施例的技术方案通过加入多传感器,能对障碍物进行形状大小判断以及轨迹预测,从而有效地规避障碍物解决了传统跟随方式无法智能避障的问题。
实施例三:
本实施例在上述任一实施例的基础上,如图3所示,本系统包含了移动平台,UWB跟随系统,超声波避障系统以及3D激光雷达避障系统。
图3是本发明实施例又一种基于UWB的机器人跟随系统的结构示意图。本跟随系统在上述实施例的基础上,控制模块包括:UWB控制器和服务器。UWB 控制器和服务器通过交换机通信连接。UWB基站、UWB控制器和服务通过交换机连接,从而实现数据交互,所使用的通讯协议时UDP通讯。服务器负责接收UWB的定位信息,并通过相关的控制算法对车辆的速度进行控制,达到智能跟随的目标。
本实施例中机器人(移动平台)由四个独立悬挂系统组成,每个独立悬挂系统都包含一个轮毂电机,它们共同组成了阿克曼车辆模型,并由VCU整车控制器来控制四个电机的输出。
uwb跟随系统由四个通讯基站(UWB基站)、一个UWB控制器和一个定位标签(UWB标签)组成,基站、UWB控制器和服务器(也就是中央控制器)通过交换机连接,从而实现数据交互,所使用的通讯协议时udp通讯,其中四个通讯基站分别设置在机器人的四个车轮上方,如图1或图3中的一一对应的设置排布方式。这四个通讯基站分为两种类型,一种是A型基站,一种是B 型基站,并按图3方式排布,通过该种方式可以实现后跟和侧跟的跟随功能,当系统工作在后跟模式时,跟随标签正前方A,B型基站工作(也就是左前轮和右前轮上方设置的UWB基站处于工作状态),另外两个基站处于空闲模式,当系统工作在左跟随模式时,左前轮和左后轮上方设置的UWB基站处于工作状态,另外两个基站处于空闲模式。当系统上电运行正常后,根据跟随模式的设置,跟随标签(UWB标签)与对应UWB基站通信,并将数据通过交换机传输给UWB控制器,UWB控制器进行数据运算,算法处理后将数据透过交换机传送至服务器。
以后跟为例,如图5所示,通过A基站测出跟随标签距离A基站的距离 AC,在通过B基站测出跟随标签距离B基站的距离BC,而AB基站的距离可通过人工测量获取,从而可求出AC与AB间的夹角α,以AB中点为坐标原点建立如下所示坐标系,分别计算C点在该坐标系下的横纵坐标Cx和Cy,经过服务器控制算法的处理得到相应的角速度和线速度,实现对被跟随目标的跟随,其中:
Cx=AC*cosα-AB/2
Cy=AC*sinα
此外,本实施例中的跟随系统还包括超声波避障系统和3D激光雷达避障系统。其中,超声波避障系统由车体周围12个超声波传感器组成,每个超声波传感器都可以检测前方0.3~3.5m范围内的障碍物,通过障碍物出现的位置对车辆进行不同程度的减速或急停控制,超声波安装位置如图2中41、42所示。
3D激光雷达避障系统由一个16线激光雷达和一个32线激光雷达组成,通过16线激光雷达检测前方一定范围内路面的障碍物,若高度小于20厘米,且非动态障碍则可以直接进行越障,32线激光雷达则用于检测车体周围360 度范围内的障碍物信息,小于0.3m时急停,其余情况则根据离障碍物的距离以及车辆最大转弯半径进行及时的绕障处理,以车头中轴线为基准线,当障碍物出现在车辆的右前方时,通过控制算法控制车辆向左前方行驶,
当障碍物出现在车辆的左前方时,通过控制算法控制车辆向右前方行驶,绕开障碍物后继续跟随目标。
以上所述服务器为车辆的中央控制器,负责接收UWB控制器发送的UWB 基站的定位信息,并通过相关的控制算法对车辆的速度进行控制,达到智能跟随的目标,同时还需要接收激光雷达和超声波的数据来判断车辆当前的状态,及时做出绕障、越障以及急停处理。
本实施例的机器人跟随系统,通过采用四个UWB基站的结构方式解决了两个或三个UWB基站无法实现全方位稳定跟随的问题。此外通过加入多传感器信息解决了传统跟随方式无法智能避障的问题。
采用本实施例的机器人跟随系统,该机器人可用于户外多场景跟随,作为一个多功能移动平台,后期可增加载人、监控以及自主巡逻等功能,在跟随模式下,通过3D激光雷达还能简单地对障碍物进行形状大小判断以及轨迹预测,从而有效地规避障碍物,通过UWB通讯方式,可大大提高跟随的稳定性以及精准性,最终实现具有完整跟随功能的移动平台。
实施例四:
如图4所示,本发明实施例提供的一种基于UWB的机器人跟随方法400,包括以下步骤:
S410:获取到机器人的跟随模式后,结合四个UWB基站与机器人的四个车轮的一一对应关系,确定与跟随目标上的UWB标签通信的目标UWB基站。
S420:接收目标UWB基站获取的其与跟随目标的距离数据。
S430:根据距离数据,以及各UWB基站的位置关系,获取机器人跟随的角速度和线速度,以实现目标的跟随。
在步骤S310的执行中,当采用的UWB基站的类型为A和B类型时,A和B属于不同类型的基站。机器人的左前轮、右后轮与A类型的UWB基站对应。机器人的右前轮、左后轮与B类型的基站对应。
四个UWB基站中,如图1或2所示,UWB基站31与机器人的左前轮对应。 UWB基站34与机器人的右前轮对应。UWB基站32与机器人的左后轮对应。UWB 基站33与机器人的右后轮对应。
当获取到的跟随模式为左跟模式时,结合各UWB基站与各车轮的对应关系,确定UWB基站31和UWB基站33为目标UWB基站。UWB基站32和UWB基站34为空闲基站。其中,目标基站处于工作状态,空闲基站处于空闲状态。
图5是本发明实施例一种UWB跟随系统实现后跟模式的原理图。系统上电后,如用户设置的跟踪模式为后跟。当UWB控制器获取到的跟随模式为后跟模式时,结合各UWB基站与各车轮的对应关系,确定UWB基站31和UWB基站34为目标UWB基站,UWB基站32和UWB基站33为空闲基站。其中,目标基站处于工作状态,空闲基站处于空闲状态。
通过A基站测出UWB标签距离A基站的距离AC,在通过B基站测出UWB 标签距离B基站的距离BC,而AB基站的距离则一般是固定的,可提前人工测量获取,从而可求出AC与AB间的夹角α,以AB中点为坐标原点建立如图5 所示坐标系,设置的坐标中心是在两个基站的中心,分别计算C点在该坐标系下的横纵坐标Cx和Cy,其中:
Cx=AC*cosα-AB/2 (1)
Cy=AC*sinα (2)
服务器控制算法的处理得到相应的角速度和线速度,实现对被跟随目标的跟随,其中:
机器人上的控制器,为整车控制器(Vehicle Control Unit,VCU)用来控制四个电机的输出。服务器算完后得到角速度和加速度,发给机器人上的控制器,控制器下发控制里量给电机,最终实现对被跟随目标的跟随。
本发明实施例的跟随系统主要用于户外多场景跟随,在跟随模式下,通过3d激光雷达还能简单地对障碍物进行形状大小判断以及轨迹预测,从而有效地规避障碍物。
本发明实施例的技术方案通过采用四个UWB基站的结构方式,提高了跟随的稳定性以及精度,解决了两个或三个UWB基站无法实现全方位稳定跟随的问题。
本申请的方法实施例与系统实施例对应,本申请的系统实施例的技术细节同样适用于方法实施例,为减少重复,不再赘述。
虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
- 一种基于UWB的机器人跟随系统及方法
- 基于UWB的自主跟随机器人定位方法及系统