垂直起降飞机及其操纵方法
文献发布时间:2023-06-19 12:18:04
技术领域
本申请涉及飞行设备领域,具体涉及一种垂直起降飞机及其操纵方法。
背景技术
目前,垂直起降飞机的一种结构为采用多旋翼垂直起飞,平飞时采用拉桨或推桨提供飞机前进动力,而在平飞过程中垂直起降时的多旋翼保持静止状态,无法产生有效推力,成为飞机平飞时的负担。
另外一种垂直起降飞机采用倾转旋翼与垂直起降多旋翼相互组合的方式,在飞机起飞降落时,部分旋翼倾转提供提升力,飞机平飞状态部分可倾转发动机旋转90°提供向前的力。或者,全部采用可倾转旋翼提供飞机垂直起降与前进的动力。可倾转旋翼机构复杂,机械结构可靠性低,容易造成安全隐患,如美国鱼鹰V22倾转旋翼飞机事故频繁。
发明内容
基于此,本申请提供了一种垂直起降飞机及其操纵方法,飞机的垂直起降和平飞采用同一动力系统,提升飞机的有效推重比,避免倾转旋翼的复杂结构。
本申请的一个实施例提供一种垂直起降飞机,包括:机身;机翼,设置于所述机身的两侧;旋翼,数量为多个,多个所述旋翼设置于所述机翼上,所述旋翼的轴线平行于所述机身的轴线,多个所述旋翼两两共轴反转;尾翼组件,包括多个尾翼和尾翼驱动单元,所述尾翼上设置舵面,用于飞机俯仰和/或偏航操纵,多个所述尾翼分别与所述机身的尾部铰接,所述尾翼驱动单元带动所述尾翼张开或收回,所述尾翼张开时作为飞机着陆支腿,所述尾翼组件收回时用于飞机空中姿态配平;辅助操纵系统,包括第一喷气口、第一高压气瓶、第二喷气口和第二高压气瓶,多个所述第一喷气口分别设置于所述机翼端部,所述第一喷气口连接所述第一高压气瓶,所述第一喷气口用于调整所述垂直起降飞机的滚转姿态,多个所述第二组喷气口分别设置于所述机身头部和所述尾翼尾部,所述第二喷气口连接第二高压气瓶,所述第二喷气口用于调整所述垂直起降飞机的俯仰姿态。
根据本申请一些实施例,所述尾翼驱动单元包括:电机;丝杠,连接所述电机;滑块,与所述丝杠螺纹连接;连杆,所述连杆的一端铰接于所述滑块,所述连杆的另一端铰接于尾翼。
根据本申请一些实施例,所述尾翼的尾部设置滚轮,用于飞机着陆时地面移动。
根据本申请一些实施例,所述机翼上设置襟翼、副翼,所述副翼用于调整所述垂直起降飞机的滚转姿态,所述襟翼在低速时展开增加所述垂直起降飞机的升力。
根据本申请一些实施例,所述机翼为可折叠机翼。
根据本申请一些实施例,所述的垂直起降飞机还包括货物装卸组件,所述货物装卸组件设置于所述机身上。
本申请的一个实施例提供一种如上所述的垂直起降飞机操纵方法,包括:多个所述尾翼张开,以支撑所述垂直起降飞机;启动所述旋翼,所述垂直起降飞机脱离地面;所述垂直起降飞机脱离地面后,收回多个所述尾翼;所述垂直起降飞机达到预设速度后,控制所述辅助操纵系统及尾翼上的舵面使所述垂直起降飞机由起降状态调整为平飞状态。
根据本申请一些实施例,控制所述辅助操纵系统及副翼调整所述垂直起降飞机的滚转姿态。
本申请的垂直起降飞机及其操纵方法,飞机的垂直起降和平飞采用同一动力系统,避免了将垂直起降动力与推进动力分开的设计,提升飞机的有效推重比;结构简单,可靠性高,避免了倾转旋翼机械结构复杂的问题;通过辅助操纵系统辅助调整飞机的姿态,提高飞机的可操作性。
附图说明
为了更清楚地说明本申请的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本申请要求保护的范围。
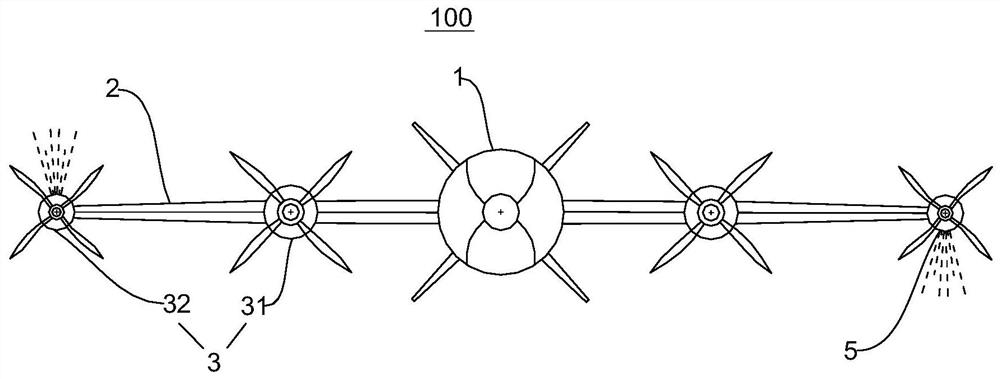
图1是本申请实施例垂直起降飞机的主视图;
图2是本申请实施例垂直起降飞机的俯视图;
图3是本申请实施例垂直起降飞机尾翼张开状态主视图;
图4是本申请实施例垂直起降飞机尾翼张开状态俯视图;
图5是本申请实施例第一喷气口和第二喷气口的示意图;
图6是本申请实施例垂直起降飞机调整滚转姿态示意图;
图7是本申请实施例第一喷气口的相关部件的示意图;
图8是本申请实施例垂直起降飞机调整俯仰状态示意图;
图9是本申请实施例第二喷气口的相关部件的示意图;
图10是本申请实施例机翼折叠状态示意图一;
图11是本申请实施例机翼折叠状态示意图二;
图12是本申请实施例货物装卸组件的示意图。
具体实施方式
下面结合本申请实施例中的附图,对本申请的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请的一部分实施例,而不是全部实施例。基于本申请中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
如图1、图2和图3所示,本实施例提供一种垂直起降飞机100。垂直起降飞机100包括:机身1、机翼2、旋翼3、尾翼组件4和辅助操作系统5。机翼2、旋翼3、尾翼组件4和辅助操作系统5均设置于机身1上。
机翼2设置于机身1的两侧,本实施例的机翼2为中单翼,有利于机身1在飞机起降及飞行时的均衡受力。在机翼2上设置短舱,用于安放旋翼3。
旋翼3设置于机翼2上。旋翼3包括电机和螺旋桨,旋翼3的电机设置于机翼2的短舱中。旋翼3的数量为多个,本实施例在机翼2的中部及机翼2远离机身1的端部设置旋翼3。各个旋翼3的螺旋桨的叶片数量根据需求设置,例如,可在机翼2远离机身1的端部的第一旋翼31上设置四个叶片,在机翼2的中部的第二旋翼32上设置两个叶片。各个旋翼3的轴线,如本实施例的旋翼3的轴线L2、L3、L4、L5,均平行于机身1的轴线L1,以使旋翼3对垂直起降飞机100提供平行于机身1的轴线L1的动力。
本实施例中,部分旋翼3设置于机翼2的前端,另一部分旋翼3设置于机翼2的后端。多个旋翼3两两共轴反转,降低陀螺力矩,增加旋翼相对速度,提升效率。可选地,四个旋翼3设置于机翼2的前端,四个旋翼3设置于机翼2的后端。工作时,四个前端的旋翼顺时针旋转,四个后端的旋翼逆时针旋转,通过八个旋翼共同提供飞机垂直起降提升力与平飞时的推进力。
尾翼组件4包括尾翼41和尾翼驱动单元42。尾翼41的数量为多个,多个尾翼41绕机身1的轴线L1圆周均布,多个尾翼41分别与机身1的尾部铰接。尾翼41与机身1的铰接形式可选用已有的铰接结构。尾翼驱动单元42带动多个尾翼41同时张开或收回。
如图4所示,垂直起降飞机100着陆在地面时,垂直起降飞机100的机头向上,多个尾翼41张开作为支腿,对垂直起降飞机100起到支撑作用。垂直起降飞机100起飞后,尾翼41收回,多个尾翼41相互紧贴,用于飞机空中姿态配平。在尾翼41上设置舵面411,舵面411可用于飞机俯仰和/或偏航操纵。
如图5~图9所示,辅助操纵系统5包括第一喷气口51、第一压缩电机52、第一空气压缩机53、第一高压气瓶54、第二喷气口55、第二压缩电机56、第二空气压缩机57和第二高压气瓶58。
多个第一喷气口51设置于机翼2的远离机身1的一端。当飞机处于低速状态时,控制第一喷气口51喷出高速射流,通过高速射流的反作用力对飞机滚转姿态进行调整。本实施例在机翼2的上下表面均设置第一喷气口51,共四个第一喷气口51,四个第一喷气口51两两差动组合,以相反方向喷出高速射流,实现飞机滚转姿态控制。图6中的箭头表示飞机的滚转力矩。
在机翼2中设置第一压缩电机52,第一压缩电机52带动第一空气压缩机53将空气压缩入第一高压气瓶54,第一高压气瓶54的出气口通过阀门连接第一喷气口51,以根据需要向第一喷气口51提供高速射流所需气源。
多个第二喷气口55分别设置在在机身1的头部和尾翼41尾部。当飞机处于低速状态时,舵面411的气动效率下降,控制第二喷气口55喷出高速射流,通过高速射流的反作用力对飞机俯仰姿态进行调整。
本实施例在四个尾翼41上分别设置一第二喷气口55,在机身1头部绕机身1的轴线均布六个第二喷气口55。俯仰姿态控制时,由机身1头部下表面三个第二喷气口55与位于上方的两个尾翼41上的两个第二喷气口55组合,或者由机身1头部上表面三个第二喷气口55与位于下方的两个尾翼41上的两个第二喷气口55组合,以相反方向高速射流喷出,实现飞机俯仰姿态控制。图8中的箭头表示飞机的俯仰力矩。
本实施例在机翼1中设置第二压缩电机56,第二压缩电机56带动第二空气压缩机57将空气压缩入第二高压气瓶58,第二高压气瓶58的出气口通过阀门连接第二喷气口55,以根据需要向第二喷气口55提供高速射流所需气源。
飞机低速时舵面411效率较低,舵面411的气动力产生的操纵力矩可能不足以调整飞机姿态,通过辅助操纵系统5喷射高速射流产生的辅助力实现起降状态到平飞状态的调整。
舵面411的控制方法为已有技术。可选地,本实施例中尾翼41的数量为四个,形成X形尾翼组。
本申请的垂直起降飞机100着陆时,通过张开的尾翼41支撑垂直起降飞机100。垂直升空时,将多个旋翼3的功率提升至起飞挡位,当螺旋桨拉力大于重力时,垂直起降飞机100悬空并逐渐上升,此时收回尾翼41,进一步加大旋翼3的功率,提供高螺旋桨转速,飞机垂向爬升率逐步增大。当飞机的速度达到预设值时,控制舵面411及辅助操纵系统5,使飞机由垂直的起降状态调整为水平的平飞状态。平飞状态下,依然通过多个旋翼3为垂直起降飞机100提供动力。飞机降落时,控制舵面411与辅助操纵系统5,使飞机由平飞状态垂直的起降状态调整为垂直的起降状态。
本实施例的垂直起降飞机通过简单的结构实现垂直起降和平飞使用同一动力系统,有效提升飞机的推重比,提高飞机的可靠性。
根据本申请一个可选的技术方案,尾翼驱动单元42包括:电机421、丝杠422、滑块423和连杆424。
电机421是设置于机身1的尾部。丝杠422与电机421的输出轴相连,丝杠422沿机身1的轴线延伸。滑块423与丝杠422螺纹连接。连杆424的一端铰接于滑块423,连杆424的另一端铰接于尾翼41。电机421带动丝杠422旋转时,滑块423向上或向下移动,带动多个尾翼41同时张开或收回。
根据本申请一个可选的技术方案,多个尾翼41的尾部均设置滚轮43,用于垂直起降飞机100着陆后的地面移动。
根据本申请一个可选的技术方案,机翼2上设置副翼21和襟翼(图中未示出)。在垂直起降飞机100处于高速状态时,控制副翼21用于调整垂直起降飞机100的滚转姿态。襟翼在低速时展开增加垂直起降飞机100的升力。可选地,在低速状态时,通过控制辅助操纵系统5的第一喷气口51喷射告诉射流与副翼21配合调整垂直起降飞机100的滚转姿态。
如图10和图11所示,根据本申请一个可选的技术方案,机翼2为可折叠机翼。在机翼2的中部的短舱处设置旋转枢轴和锁扣,以使机翼2可折叠。旋转枢轴和锁扣为已有结构。在飞机降落进入机库或者运输时,将外翼折叠,减小飞机的占用面积。
如图12所示,垂直起降飞机100还包括货物装卸组件6。货物装卸组件6包括可伸缩电动缸61、钢索62和滑轮,可伸缩电动缸61设置于机身1上,钢索62通过滑轮设置于可伸缩电动缸61上。可伸缩电动缸61和钢索62配合可将货物63装载到机舱中,或将机舱中的货物卸载到地面。
根据本申请一个可选的技术方案,在机翼中安装电池,电池可以为燃料电池或锂离子电池,用于为垂直起降飞机100供电。
本实施例提供一种如上的垂直起降飞机100的操纵方法,包括:
1、垂直起降飞机100处于地面时,多个尾翼41张开,以支撑垂直起降飞机100;
2、垂直起降飞机100起飞时,启动旋翼3,垂直起降飞机脱离地面;
3、垂直起降飞机100脱离地面后,收回多个尾翼;
4、垂直起降飞机100达到预设速度后,控制舵面411与辅助操纵系统5使垂直起降飞机100由起降状态调整为平飞状态。
根据本申请一个可选的技术方案,飞机处于低速状态时,控制辅助操纵系统5及副翼21调整垂直起降飞机100的滚转姿态。
以上对本申请实施例进行了详细介绍。本文中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本申请的技术方案及其核心思想。因此,本领域技术人员依据本申请的思想,基于本申请的具体实施方式及应用范围上做出的改变或变形之处,都属于本申请保护的范围。综上所述,本说明书内容不应理解为对本申请的限制。
- 垂直起降飞机及其操纵方法
- 固定翼飞机的垂直起降机架结构和垂直起降固定翼飞机