作业机械以及作业机械的控制方法
文献发布时间:2023-06-19 12:19:35
技术领域
本公开涉及一种作业机械以及作业机械的控制方法。
背景技术
在专利文献1中,公开了如下技术:在作业机械中,控制器基于加速器操作部件的操作,来决定变速器的目标牵引力。由此,操作者能够通过加速器操作部件任意地操作用于使作业机械行驶的扭矩。
另外,在专利文献1中,控制器基于工作装置操作部件的操作,来决定工作装置的要求扭矩。控制器基于变速器的目标牵引力和工作装置的要求扭矩,来控制发动机。由此,操作者不操作加速器操作部件,仅操作工作装置操作部件,就能够增大发动机的输出。由此,能够使工作装置以期望的速度进行动作。
现有技术文献
专利文献
专利文献1:国际公开第2014/208614号
发明内容
发明要解决的课题
如上所述,在基于加速器操作部件的操作来决定目标牵引力的情况下,在操作者无意识地进行较大的操作时,在作业机械中产生较大的加速力。在该情况下,乘坐舒适性降低。
因此,如果限制发动机的输出,则能够抑制这样较大的加速力的产生。但是,在该情况下,不能得到期望的工作装置的要求扭矩,作业性有可能降低。
另外,限制目标牵引力的上限也可以抑制较大的加速力的产生。但是,作业机械不限定于平坦的道路,有时行驶在恶劣道路或陡坡上。另外,作业机械不仅在道路上行驶,有时还进行挖掘等作业。因此,作业机械所承受的负载根据状况而有很大不同。因此,如果一样地限制目标牵引力的上限,则在作业机械的负载较大的状况下,不能得到充分的加速力,有行驶性降低的可能。
本公开的目的在于,在作业机械中,抑制过大的加速力的产生,同时抑制作业性和行驶性的降低。
用于解决课题的方案
第一方式的作业机械具备发动机、行驶驱动系统、工作装置、设备驱动系统、加速器操作部件、工作装置操作部件、控制器。行驶驱动系统包括与发动机连接的变速器。设备驱动系统包括由发动机驱动的液压泵。液压泵喷出供给到工作装置的工作油。加速器操作部件接受由操作者进行的操作。工作装置操作部件接受由操作者进行的操作。
控制器根据工作装置操作部件的操作量,控制设备驱动系统。控制器基于加速器操作部件的操作量,决定行驶驱动系统的目标牵引力。控制器决定作业机械的容许加速度。控制器基于容许加速度,决定行驶驱动系统的牵引力的上限值。在目标牵引力比上限值大时,控制器修正目标牵引力使其为上限值以下。控制器基于修正后的目标牵引力,控制行驶驱动系统。
第二方式的方式是作业机械的控制方法。作业机械具备发动机、行驶驱动系统、工作装置、设备驱动系统。行驶驱动系统包括与发动机连接的变速器。设备驱动系统包括由发动机驱动的液压泵。液压泵喷出供给到工作装置的工作油。该方法具备以下处理。第一处理是取得工作装置操作部件的操作量。第二处理是根据工作装置操作部件的操作量来控制设备驱动系统。第三处理是取得加速器操作部件的操作量。第四处理是基于加速器操作部件的操作量来决定行驶驱动系统的目标牵引力。第五处理是决定作业机械的容许加速度。第六处理是基于容许加速度来决定行驶驱动系统的牵引力的上限值。第七处理是在目标牵引力比上限值大时,修正目标牵引力使其为上限值以下。第八过程是基于修正后的目标牵引力来控制行驶驱动系统。
发明效果
在本公开中,在目标牵引力比上限值大时,修正目标牵引力,使其为上限值以下。因此,与发动机的输出被限制的情况相比,能够确保用于设备驱动系统的扭矩。由此,能够抑制作业性的降低。另外,行驶驱动系统的牵引力的上限值基于容许加速度来决定。因此,能够确保与容许加速度相当的行驶驱动系统的牵引力。由此,能够抑制过大的加速力的产生,同时能够抑制行驶性的降低。
附图说明
图1是实施方式的作业机械的侧视图。
图2是示出作业机械的驱动系统以及控制系统的结构的框图。
图3是示出牵引力-车速特性的图。
图4是示出用于控制发动机的处理的框图。
图5是示出用于决定目标牵引力的处理的框图。
图6是示出系数数据的一例的图。
图7是示出第二模式下的牵引力的上限值的图。
图8是示出第一模式下的牵引力的上限值的图。
图9是示出用于控制变速器的处理的框图。
具体实施方式
以下,参照附图,对本发明的实施方式进行说明。图1是本发明的实施方式的作业机械1的侧视图。如图1所示,作业机械1具备车体2和工作装置3。
车体2包括前车体2a和后车体2b。后车体2b相对于前车体2a可左右地回旋地连接。在前车体2a和后车体2b上,连结有液压缸15。通过液压缸15的伸缩,前车体2a相对于后车体2b左右地回旋。
工作装置3用于挖掘等作业。工作装置3安装在前车体2a上。工作装置3包括大臂11、铲斗12、液压缸13、14。通过液压缸13、14的伸缩,大臂11以及铲斗12进行动作。
图2是示出作业机械1的驱动系统以及控制系统的结构的框图。如图2所示,作业机械1的驱动系统包括发动机21、行驶驱动系统20a、设备驱动系统20b。
发动机21例如是柴油发动机。在发动机21中,设置有燃料喷射装置26。燃料喷射装置26通过调整喷射到发动机21的气缸内的燃料量,来控制发动机21的输出。
行驶驱动系统20a包括变速器23和行驶装置24。变速器23与发动机21连接。例如,变速器23是HST(Hydro-Static Transmission,静液压变速器)。但是,变速器23也可以是HMT(Hydraulic Mechanical Transmission,重型机械变速器)或EMT(ElectricMechanical Transmission,电气机械变速器)等其它类型的变速器。
行驶装置24使作业机械1行驶。行驶装置24包括轮轴(axle)31a、31b、前轮32、后轮33。轮轴31a、31b与变速器23连接。前轮32设置在前车体2a上。后轮33设置在后车体2a上。轮轴31a、31b将来自变速器23的驱动力传递到前轮32和后轮33。
设备驱动系统20b包括PTO(动力输出装置,Power Take Off)22和液压泵25。PTO22将发动机21的驱动力分配给变速器23和液压泵25。需要说明的是,在图2中,仅示出了一个液压泵25。但是,两个以上的液压泵也可以经由PTO22与发动机21连接。
液压泵25经由PTO22与发动机21连接。液压泵25通过发动机21驱动,并喷出工作油。从液压泵25喷出的工作油供给到上述的液压缸13-15。
作业机械1的控制系统包括发动机传感器34、车速传感器35、泵传感器36。发动机传感器34检测发动机旋转速度。车速传感器35检测行驶驱动系统20a的输出旋转速度。行驶驱动系统20a的输出旋转速度例如是变速器23的输出轴的旋转速度。但是,输出旋转速度也可以是位于变速器23内或变速器23的下游的其他旋转元件的旋转速度。泵传感器36检测液压泵25的喷出压。
作业机械1的控制系统包括控制器41。控制器41控制作业机械1。控制器41从发动机传感器34接收表示发动机旋转速度的信号。控制器41从车速传感器35接收表示输出旋转速度的信号。控制器41从泵传感器36接收表示液压泵25的喷出压的信号。控制器41将指令信号发送到发动机21以及变速器23。
控制器41包括处理器42和存储装置43。处理器42例如是CPU(中央处理单元,central processing unit)。或者,处理器42也可以是与CPU不同的处理器。处理器42根据程序执行用于控制作业机械1的处理。存储装置43包括ROM(只读存储器)等非易失性存储器和RAM(随机存取存储器)等易失性存储器。存储装置43也可以包括硬盘或SSD(固态驱动器,Solid State Drive)等辅助存储装置。存储装置43是非瞬时(non-transitory)计算机可读的记录介质的一例。存储装置43存储用于控制作业机械1的程序以及数据。
作业机械1的控制系统包括加速器操作部件44、工作装置操作部件45、输入装置46。为了控制作业机械1的行驶,加速器操作部件44可由操作者操作。加速器操作部件44例如是踏板。但是,加速器操作部件44也可以是杆或开关等其他部件。
为了控制工作装置3,工作装置操作部件45可由操作者操作。工作装置操作部件45例如是杆。但是,工作装置操作部件45也可以是开关或踏板等其他部件。为了选择作业机械1的控制模式,输入装置46可由操作者操作。输入装置46例如包括触摸面板。但是,输入装置46也可以包括机械式的开关等其他部件。
控制器41从加速器操作部件44接收表示加速器操作量的信号。加速器操作量是加速器操作部件44的操作量。控制器41从工作装置操作部件45接收表示工作装置操作量的信号。工作装置操作量是工作装置操作部件45的操作量。
控制器41从输入装置46接收表示控制模式的选择的信号。控制模式包括第一模式和第二模式。但是,控制器41也可以根据施加在作业机械1上的负载,自动地选择控制模式。
图3是示出第一模式和第二模式的各自的牵引力-车速特性的图。在图3中,L1表示第一模式中的牵引力-车速特性。L2表示第二模式中的牵引力-车速特性。牵引力-车速特性表示各车速的最大牵引力。如图3所示,在第二模式中,作业机械1的牵引力被限制为比第一模式小。控制器41根据从第一模式和第二模式中选择的控制模式来控制发动机21和变速器23。
以下,对由控制器41执行的用于控制发动机21的处理进行说明。图4是示出用于控制发动机21的处理的框图。如图4所示,在步骤S101中,控制器41决定行驶驱动系统20a的目标牵引力。控制器41主要根据加速器操作量和输出旋转速度来决定目标牵引力。关于目标牵引力的决定方法,在后面详细地说明。
需要说明的是,行驶驱动系统20a的牵引力与行驶驱动系统20a的输出扭矩对应。行驶驱动系统20a的牵引力和行驶驱动系统20a的输出扭矩能够互相换算。因此,在以下的说明中,牵引力可以被称为输出扭矩。
在步骤S102中,控制器41决定PTO要求扭矩。PTO要求扭矩是设备驱动系统20b的要求扭矩。换而言之,PTO要求扭矩是经由PTO22与发动机21连接的设备中的要求扭矩。控制器41根据工作装置操作量和液压泵25的喷出压来决定PTO要求扭矩。PTO要求扭矩包括液压泵25中的要求扭矩。例如,控制器41根据工作装置操作量来决定工作油的要求流量。控制器41根据要求流量和喷出压来决定PTO要求扭矩。需要说明的是,在两个以上的液压泵经由PTO22与发动机21连接的情况下,PTO要求扭矩还可包括其它液压泵的要求扭矩。
在步骤S103中,控制器41决定要求发动机功率。要求发动机功率是发动机21中的要求马力。控制器41根据PTO要求扭矩和目标牵引力来决定要求发动机功率。例如,控制器41根据PTO要求扭矩和目标牵引力之和来决定要求发动机功率。
在步骤S104中,控制器41决定目标发动机旋转速度。控制器41根据要求发动机功率来决定目标发动机旋转速度。例如,控制器41存储目标发动机旋转速度数据D1。目标发动机旋转速度数据D1规定要求发动机功率Pe与目标发动机旋转速度Nt的关系。控制器41参照目标发动机旋转速度数据D1,根据要求发动机功率Pe决定目标发动机旋转速度Nt。
控制器41根据如上所述决定的目标发动机旋转速度来决定对燃料喷射装置26的指令。由此,控制发动机21的输出,以达到目标牵引力和PTO要求扭矩。需要说明的是,控制器41也可以根据PTO要求扭矩和目标牵引力来决定发动机21的目标扭矩。控制器41也可以基于发动机21的目标扭矩来控制发动机21。
接着,对用于决定目标牵引力的处理进行说明。图5是示出用于决定目标牵引力的处理的框图。如图5所示,在步骤S201中,控制器41决定行驶驱动系统20a的要求牵引力。控制器41根据加速器操作量和输出旋转速度来决定要求牵引力。例如,控制器41存储要求牵引力数据D2。要求牵引力数据D2规定车速V与要求牵引力Ft的关系。要求牵引力数据D2根据加速器操作量而变更。控制器41根据输出旋转速度来计算车速。控制器41参照要求牵引力数据D2,根据加速器操作量和车速来决定要求牵引力。
在步骤S202中,控制器41决定牵引力系数。控制器41根据车速和控制模式来决定牵引力系数。例如,控制器41存储图6中所示的系数数据D3。系数数据D3规定车速与牵引力系数的关系。系数数据D3包括第一系数数据D3a和第二系数数据D3b。第一系数数据D3a规定第一模式下的车速与牵引力系数的关系。第二系数数据D3b规定第二模式下的车速与牵引力系数的关系。
在第一系数数据D3a中,在车速为V1以下,牵引力系数为C3。在车速为V2以上,牵引力系数为C4。C4比C3大。C4也可以是1。或者,C4也可以是与1不同的值。在第一系数数据D3a中,在车速为V1到V2之间的范围时,牵引力系数根据车速的增大而增大。
在第二系数数据D3b中,在车速为V1以下,牵引力系数为C1。在车速为V2以上,牵引力系数为C2。C2比C1大。C2比C3小。但是,C2也可以与C3相同。或者,C2也可以比C3大。在第二系数数据D3b中,在车速为V1到V2之间的范围时,牵引力系数根据车速的增大而增大。
在步骤S203中,控制器41决定目标牵引力。控制器41通过将在步骤S201中决定的要求牵引力乘以牵引力系数,来决定目标牵引力。如上所述,第二模式下的牵引力系数比第一模式下的牵引力系数小。因此,第二模式下的目标牵引力被限制为比第一模式下的目标牵引力小。由此,实现图3所示的第一模式的牵引力-车速特性L1和第二模式的牵引力-车速特性L2。换而言之,控制器41通过将要求牵引力数据乘以第一模式的牵引力系数,将要求牵引力数据变更为相当于第一模式的牵引力-车速特性L1的数据。控制器41通过将要求牵引力数据乘以第二模式的牵引力系数,将要求牵引力数据变更为相当于第二模式的牵引力-车速特性L2的数据。
在步骤S204中,控制器41决定容许加速度。控制器41根据控制模式来决定容许加速度。控制器41在第一模式中将第一加速度决定为容许加速度。控制器41在第二模式中将第二加速度决定为容许加速度。第二加速度比第一加速度小。因此,第二模式下的容许加速度比第一模式下的容许加速度小。
第一加速度和第二加速度例如为固定值。但是,第一加速度和第二加速度也可以是变量。控制器41也可以基于作业机械1的状态来决定第一加速度和第二加速度。作业机械1的状态例如也可以是作业机械1是否为挖掘状态。控制器41也可以使作业机械1为挖掘状态时的第二加速度从作业机械1为非挖掘状态时的第二加速度变化。或者,控制器41可以基于作业机械1的车速来决定第一加速度和第二加速度。
在步骤S205中,控制器41决定行驶负载。行驶负载是行驶驱动系统20a的负载。控制器41根据行驶驱动系统20a的牵引力、作业机械1的加速度、作业机械1的重量来计算行驶负载。
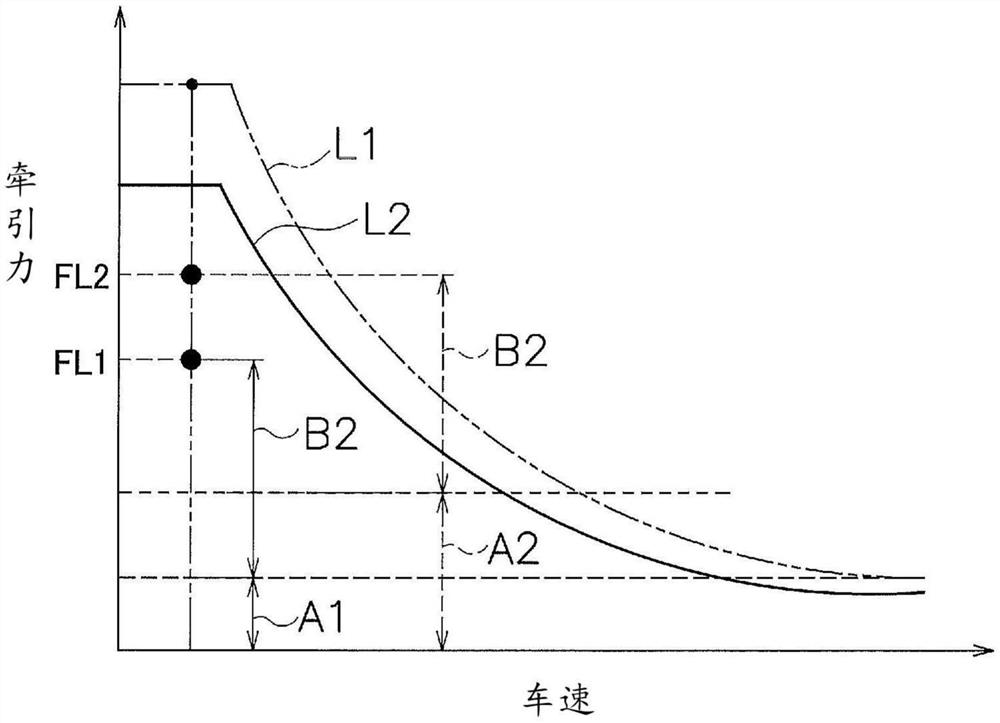
在步骤S206中,控制器41决定牵引力的上限值。控制器41基于相当于行驶负载的行驶驱动系统20a的牵引力和相当于容许加速度的行驶驱动系统20a的牵引力,来决定牵引力的上限值。图7是示出第二模式中的牵引力的上限值的一例的图。在图7中,A1表示相当于平地上行驶时的行驶负载的牵引力。A2表示相当于挖掘时的行驶负载的牵引力。挖掘时的行驶负载A2比平地上行驶时的行驶负载A1大。这样,行驶负载根据作业机械1的状态而变动。
在图7中,B2表示相当于第二模式下的容许加速度的行驶驱动系统20a的牵引力。在相当于行驶负载的牵引力为A1时,控制器41将作为A1和B2之和的FL1决定为牵引力的上限值。在相当于行驶负载的牵引力为A2时,控制器41将作为A2和B2之和的FL2决定为牵引力的上限值。
图8是示出第一模式中的牵引力的上限值的一例的图。在图8中,B1表示相当于第一模式下的容许加速度的行驶驱动系统20a的牵引力。在相当于行驶负载的牵引力为A1时,控制器41将作为A1和B1之和的FL3决定为牵引力的上限值。在相当于行驶负载的牵引力为A2时,控制器41将作为A2和B1之和的FL4决定为牵引力的上限值。
在步骤S207中,控制器41修正目标牵引力。在步骤S203中决定的目标牵引力的值比牵引力的上限值大时,控制器41将目标牵引力修正为上限值。在步骤S203中决定的目标牵引力的值为牵引力的上限值以下时,控制器41将在步骤S203中决定的值决定为目标牵引力。即,在步骤S203中决定的目标牵引力的值为牵引力的上限值以下时,控制器41不进行目标牵引力的修正。
图9是示出用于控制变速器23的处理的框图。控制器基于如上述那样决定的目标牵引力,来控制变速器23的变速比。如图9所示,在步骤S301中,控制器41决定输出加速度。输出加速度例如是变速器23的输出轴的加速度。但是,输出加速度也可以是位于变速器23内或变速器23的下游的其他旋转元件的加速度。需要说明的是,输出加速度包括变速器23的输出轴的减速度。例如,负值的输出加速度表示减速度。控制器41根据目标牵引力和行驶负载来决定变速器23的输出加速度。
在步骤S302中,控制器41决定输出旋转速度的推定值。输出旋转速度的推定值是作为规定时间后的输出旋转速度而被推定的值。规定时间例如根据由控制器41进行的处理的控制周期来决定。控制器41根据当前的输出旋转速度和输出加速度,来决定输出旋转速度的推定值。
在步骤S303中,控制器41决定发动机21的加速度。发动机21的加速度是发动机21的输出轴的加速度。发动机21的加速度也可以是变速器23的输入轴的加速度。控制器41根据发动机21的目标加速扭矩来决定发动机21的加速度。例如,控制器41根据目标发动机旋转速度和当前的发动机旋转速度,来决定发动机21的目标加速扭矩。
在步骤S304中,控制器41决定输入旋转速度的推定值。输入旋转速度例如是变速器23的输入轴的旋转速度。输入旋转速度的推定值是作为规定时间后的输入旋转速度而被推定的值。控制器41根据当前的发动机旋转速度和发动机21的加速度,来决定输入旋转速度的推定值。
在步骤S305中,控制器41决定目标速度比。控制器41根据输出旋转速度的推定值和输入旋转速度的推定值,来决定目标速度比。目标速度比是输出旋转速度的推定值与输入旋转速度的推定值之比。
控制器41决定向变速器23的指令,以使变速器23的速度比成为目标速度比。例如,在变速器23为HST的情况下,控制器41根据目标速度比,决定HST的液压泵和液压马达的目标容量。在变速器23为HMT的情况下,控制器41与HST同样地,根据目标速度比,决定HMT的液压马达的目标扭矩。在变速器23为EMT的情况下,控制器41根据目标速度比,决定EMT的电动马达的目标扭矩。由此,控制变速器23的速度比,以达成目标牵引力和目标发动机旋转速度。
在以上说明的本实施方式的作业机械1中,在目标牵引力比上限值大时,修正目标牵引力,使其为上限值以下。因此,与发动机的输出被限制的情况相比,能够确保设备驱动系统20b的要求扭矩。由此,能够抑制作业性的降低。另外,行驶驱动系统20a的牵引力的上限值基于容许加速度来决定。因此,能够确保与容许加速度相当的行驶驱动系统20a的牵引力。由此,能够抑制过大的加速力的产生,同时即使行驶负载变化也能够确保一定的加速度。其结果,能够抑制行驶性的降低。
以上,对本发明的一个实施方式进行了说明,但本发明不限定于上述实施方式,能够在不脱离发明主旨的范围内进行各种变更。作业机械1不限于轮式装载机,也可以是推土机或机动平地机等其他机械。
用于控制发动机21的处理不限于上述处理,也可以变更、省略或追加。用于决定目标牵引力的处理不限于上述处理,也可以变更、省略或追加。用于决定容许加速度的处理不限于上述处理,也可以变更、省略或追加。例如,在容许加速度的决定中,也可以省略行驶负载。处理的执行顺序不限于上述的顺序,也可以变更。上述的数据D1-D3不限于上述的数据,也可以变更。
控制器41也可以根据作业机械的作业状态来变更目标牵引力。例如,控制器41也可以判定作业机械的作业状态是否为挖掘。控制器41也可以基于工作装置操作部件45的操作、工作装置的位置以及液压缸13、14的液压,来判定工作装置的作业状态是否为挖掘。控制器41也可以在第二模式中作业机械的作业状态为挖掘时,变更要求牵引力数据D2,以使与作业机械的作业状态为挖掘以外的作业时相比,目标牵引力增大。例如,控制器41也可以在第二模式中作业机械的作业状态为挖掘时,与作业机械的作业状态为行驶状态时相比,使牵引力系数增大。
产业上的可利用性
根据本公开,在作业机械中,能够抑制过大的加速力的产生,同时抑制作业性和行驶性的降低。
附图标记说明
2a前车体
2b后车体
20a行驶驱动系统
20b设备驱动系统
21发动机
23变速器
24行驶装置
32前轮
33后轮
41控制器
44加速器操作部件
45工作装置操作部件
- 作业机械的锁定控制系统与作业机械的锁定控制方法及作业机械以及作业机械的锁定控制装置与作业机械的锁定控制管理装置
- 作业机械的控制系统、作业机械、作业机械的管理系统和作业机械的控制方法