用于对呼吸治疗系统的导管中的水进行检测的系统和方法
文献发布时间:2023-06-19 12:19:35
背景技术
本发明总体上涉及一种用于对呼吸治疗系统的导管中的水进行检测的系统和方法。本申请要求于2018年12月13日提交的临时申请US 62/779369的优先权,该临时申请的全部内容通过援引并入本文。本申请还涉及于2018年7月12日提交的已公布专利申请US20190209801以及于2019年9月10日提交的美国临时申请US 62/898464的披露内容,这些申请中的每一个的全部内容也通过援引并入本文。
相关技术说明
例如无创呼吸机、提供鼻或气管高流量的高流量系统、呼吸加湿系统以及不同模式(双水平等)的CPAP装置等一些呼吸治疗系统具有嵌入式系统来控制递送给患者的呼吸气体的湿度以改善治疗和使用舒适度。这些已知系统旨在以对应于呼吸条件的正确湿度递送加压呼吸气体,并且避免在设备的呼吸气体流动路径中的冷凝、诸如在患者接口中和/或在呼吸导管(例如像呼吸气体递送导管和/或任何呼气导管)中的冷凝。
在没有湿度控制的系统中或者当没有或无法针对给定的环境条件(例如,在干燥、炎热的环境条件到寒冷、潮湿的条件中可能需要的不同的设置)正确配置湿度控制时,在可操作地联接并且因此包括到患者接口的呼吸气体流动路径的一部分的导管中的水的积聚是常见的问题。另外,为了患者的舒适度和安全性,防止相关联的导管中的水的积聚可能很重要。例如,呼吸导管中的液体冷凝可能是有问题的,因为它可能会损害向患者递送的呼吸治疗的有效性。在呼吸导管中积聚的液体冷凝物还可能对患者的安全性和舒适性构成危险,因为液体冷凝物可能会移动并且最终可能进入患者气道内。当呼吸导管或其一部分未加热,或者任何已加热的呼吸导管的控制无法充分控制呼吸导管的加热(例如由于使用系统的环境条件)时,也可能出现该问题。
发明内容
根据本披露的方面,通过分析与呼吸导管中的呼吸气体流量和/或压力相关联的信号来实现水的检测。该呼吸导管可以包括加湿器与患者之间的流动路径的任何部分,包括例如呼吸气体递送或吸气导管、呼气或排气导管和/或任何相关联的导管连接器。可以生成指示该呼吸导管中的水的输出信号。此外,水的检测,并且特别是输出信号,随后可以用作输入来控制呼吸导管中的湿度和/或冷凝,以便减少或最小化呼吸导管中的水的量,或者至少进一步防止或最小化该呼吸导管中积聚的水。水的检测,特别是该输出信号,可以用作用于控制该呼吸导管内的加热器以至少部分地使任何检测到的液体冷凝物蒸发的输入。此外,水的检测,特别是输出信号,可以用于控制一些呼吸系统的其他部件,例如流发生器,诸如鼓风机,以便至少部分地干燥该导管并且至少部分地使该液体冷凝物蒸发。
在一些实施例中,如果检测到液态水,则可以发出警报。该警报可以包括视觉、听觉或触觉警报,并且可以包括该呼吸装置的显示器(例如触摸屏显示器)上的消息,和/或还可以包括一个或多个警告声音和/或一个或多个警告灯被激活。该呼吸装置可以由控制器控制以产生与检测到的在该呼吸导管中存在液体冷凝物相关联的特定声音或消息或灯序列(例如,使灯闪烁或以预定模式打开灯)。
根据本披露的一方面,提供了一种呼吸治疗系统,该呼吸治疗系统被配置为检测出在用于患者的呼吸治疗的呼吸导管中积聚的水。该系统包括控制器,该控制器被配置为:处理与所述导管中的气体流量和/或压力相关联的至少一个第一信号;针对该获取的至少一个第一信号的至少一部分来确定与流量扰动和/或压力扰动相关联的至少一个第一参数;并且基于满足第一阈值的该至少一个第一参数的该或这些测量值来确定在该呼吸导管中存在液态水。
根据本披露的一方面,提供了一种呼吸治疗系统,该呼吸治疗系统被配置为检测出在用于患者的呼吸治疗的呼吸气体呼吸导管中存在液态水,该系统包括控制器,该控制器被配置为:
a)获取与该呼吸导管中的气体流量和/或压力相关联或指示其的至少一个第一信号,
b)针对该获取的至少一个第一信号的至少一部分来确定与气体流量扰动和/或压力扰动相关联的至少一个第一参数的测量值,
c)至少部分地基于满足第一阈值的该至少一个第一参数的该或这些测量值来确定在该呼吸导管中存在液体。
此处使用的“液体”是指任何单一液体,或液体的混合物或组合。液体可以简单地包括水。液体可以包括水和例如来自雾化器的药物的混合物。替代性地,该系统可以检测出在该导管内存在该加湿流体的液体冷凝物。加湿流体可以是或包括水,但也可以是或包括其他物质。
该控制器可以被进一步配置为:
a)针对该接收到的至少一个第一信号的至少一个另一部分来确定与流量扰动和/或压力扰动相关联的至少一个另外的第一参数,以及
b)进一步至少部分地基于满足该第一阈值的该至少一个另外的第一参数来确定在该呼吸导管中存在液态水。
该控制器可以被配置为至少部分地基于该获取的信号的该至少一部分与参考信号之间的比较来识别用于该获取的至少一个第一信号的相关联的部分的气体流量扰动和/或压力扰动。
该控制器可以被进一步配置为:
a)获取与气体流量和/或压力间接相关的信息,
b)确定与该获取的信息相关联的至少一个第二参数的测量值,并且其中,确定在该呼吸导管中存在液态水进一步至少部分地基于满足第二阈值的该至少一个第二参数的该或这些测量值。
该至少一个第二参数可以与以下各项中的一项或多项相关联:
a)该气流的温度,
b)环境温度,
c)该气流的湿度,
d)环境湿度,
e)装置地理位置,
f)环境天气预报,和/或
g)高度(例如该系统所在位置的高度)。
该至少一个第一参数可以与由气体流量和/或压力的扰动引起的尖峰相关联。
该参考信号可以与该呼吸导管的预估气体流量和/或压力相关联。
该预估气体流量和/或压力可以至少部分地基于在使用中可操作地连接到该呼吸导管的呼吸治疗装置的设置的气体流量和/或压力分布和/或与该患者的呼吸相关联的一个或多个特性或特征、诸如呼吸模式/速率、潮气量、分钟通气量、肺顺应性或肺限制中的任何一个或多个来预估。
该预估气体流量和/或压力可以进一步至少部分地基于该呼吸导管与该患者之间的呼吸气体的预估泄漏来预估。
该呼吸导管的预估气体流量和/或压力可以至少部分地基于可操作地连接到该呼吸导管的呼吸治疗系统的已知气体流量和/或压力分布或设置减去在使用中该呼吸导管与该患者之间的预估泄漏来预估。
该至少一个第一参数可以与以下各项中的任何一项或多项有关:
a)频率,
b)强度,
c)幅值,
d)峰值之间的周期,
e)峰值周期,
f)呼吸周期的急剧变化的位置,和/或
g)该至少一个第一信号相关于参考值的流量扰动和/或压力扰动的持续时间。
该控制器可以被进一步配置为
响应于确定在该呼吸导管中存在液态水而输出控制信号。
该系统可以包括呼吸气体导管加热丝或加湿器加热器。
该控制信号可以被配置为控制该呼吸气体导管加热丝或加湿器加热器的操作,以便响应于确定在该呼吸导管中存在液态水而增加该呼吸导管中的这些气体的气体温度。
该控制信号可以被配置为确定、改变或控制该系统的操作设置。
这些操作设置可以与变化的湿度、变化的温度或者到可操作地连接到该系统或包括该系统的一部分的加热器的变化的功率中的任何一个或多个相关联。
该控制信号可以被配置为向可由该系统执行的算法提供反馈,所述算法是以下各项中的任何一项或多项:
a)双水平触发算法;
b)呼吸检测算法;
c)流量限制检测算法;
d)流量控制算法;和/或
e)压力控制算法
如果检测到存在液体冷凝物,例如液态水,则该或这些算法也可以接收输入以改变该或这些算法的操作以克服该呼吸导管中的部分阻塞(即部分堵塞),使得可以递送所需的流速和/或可以递送所需的压力。
该控制信号可以向加湿器加热器控制算法和/或呼吸导管加热丝控制算法提供反馈。
该系统可以包括以下各项中的任何一项或多项:加湿器和/或流发生器。该流发生器可以包括例如鼓风机、气体浓缩器、涡轮机、压缩机、加压气体源或任何组合。该流发生器可以包括由电动机驱动的鼓风机。该加压气体源可以包括该系统的一部分,或者可以是例如该系统所连接到的医院气体源。
可以至少部分地基于对该至少一个第一信号的频率分析来确定该或这些第一参数中的至少一个。
该频率分析可以至少部分地基于该至少一个第一信号的快速傅立叶变换(FFT)。
可以至少部分地基于对该至少一个第一信号的小波分析来确定与流量扰动和/或压力扰动相关联的至少一个第一参数。
该控制器可以被进一步配置为在确定在该呼吸导管中存在液态水之前使用滤波器对该或这些第一信号中的至少一个进行滤波。
该控制器可以被进一步配置为在确定该或这些第一参数中的至少一个之前使用滤波器对该或这些第一信号中的至少一个进行滤波。
该至少一个第一信号的该频率分析可以至少部分地基于与该至少一个第一信号相关联的至少一个频谱图。
可以使用机器学习来导出该第一阈值。
可以使用机器学习来导出该第二阈值。
该系统可以包括以下各项中的至少一项:
a)用于向用户提供呼吸气流的呼吸治疗装置;
b)加湿器;
c)呼吸气体递送呼吸导管;
d)包括多个呼吸导管和/或导管连接器的呼吸回路;
e)流发生器;以及
f)患者接口。
该控制器可以被配置为:
a)在第一测量周期期间,从至少一个传感器获取与该呼吸导管中的气体流量和/或压力相关联或指示其的该至少一个第一信号,以及
b)当该至少一个第一参数的该测量值超过该第一阈值时确定在该呼吸导管中存在液态水。
该控制器可以包括该呼吸治疗系统的流发生器的控制器。
该控制器可以被配置为至少部分地基于所述比较来识别与气体流量扰动和/或压力扰动相关联的该获取的至少一个第一信号的至少一部分或至少另一部分。
根据本披露的另一方面,提供了一种根据上述任一陈述所述的呼吸治疗系统,其中,该呼吸治疗系统是以下各项或者包括以下各项的一部分:
a)持续气道正压通气(CPAP)系统;
b)呼吸机;
c)加湿器;
d)高流量治疗系统;
e)手术加湿器;
f)吹入器,该吹入器用于在预定压力下向手术部位中提供气流。这些气体可以是二氧化碳或二氧化碳与至少一种其他气体的混合物。
根据本披露的另一方面,提供了一种根据上述任一陈述所述的呼吸治疗系统,其中,该呼吸治疗系统包括以下各项中的任一项或多项:
a)加湿器,该加湿器包括加热板组件和被配置为安装在该加热板上的加湿器室,其中,该加湿器室可选地可移除地安装在该加热板上;
b)集成单元,该集成单元包括鼓风机单元和加湿单元的,其中,该鼓风机单元和该加湿单元被封闭在公共壳体或外壳内。
根据本披露的另一方面,提供了一种计算机实现的方法,该方法被配置为检测出在用于患者的呼吸治疗的呼吸气体呼吸导管中存在液态水,该方法包括
a)由控制器获取与该呼吸导管中的气体流量和/或压力相关联或指示其的至少一个第一信号,
b)由该控制器针对该获取的至少一个第一信号的至少一部分来确定与气体流量扰动和/或压力扰动相关联的至少一个第一参数的测量值,以及
c)由该控制器至少部分地基于满足第一阈值的该至少一个第一参数的该或这些测量值来确定在该呼吸导管中存在液体。
该计算机实现的方法可以进一步包括在该控制器中执行由前述陈述中的任一项所述的控制器执行的任何一个功能步骤。
根据本披露的另一方面,提供了一种包括指令的非暂时性计算机可读介质,当由呼吸治疗系统的处理器/控制器执行时,这些指令会导致该呼吸治疗系统检测出在用于患者的呼吸治疗的呼吸气体呼吸导管中存在液态水,该检测包括以下步骤:
a)由控制器获取与该呼吸导管中的气体流量和/或压力相关联或指示其的至少一个第一信号,
b)由该控制器针对该获取的至少一个第一信号的至少一部分来确定与气体流量扰动和/或压力扰动相关联的至少一个第一参数的测量值,以及
c)由该控制器至少部分地基于满足第一阈值的该至少一个第一参数的该或这些测量值来确定在该呼吸导管中存在液体。
根据本披露的另一方面,提供了一种呼吸治疗系统,该呼吸治疗系统包括:
流发生器;
加湿器;
呼吸导管;
患者接口,该患者接口联接到该呼吸导管以向患者递送气流;
传感器,该传感器被配置为确定该气流的压力或流量;
控制器,该控制器被配置为控制该流发生器以产生该气流;并且该控制器被配置为:
a)获取与该呼吸导管中的气体流量和/或压力相关联或指示其的至少一个第一信号;
b)针对该获取的至少一个第一信号的至少一部分来确定与气体流量扰动和/或压力扰动相关联的至少一个第一参数的测量值;以及
c)至少部分地基于满足第一阈值的该至少一个第一参数的该或这些测量值来确定在该呼吸导管中存在液体。
根据本披露的另一方面,提供了一种高流量治疗系统,该系统包括:
流发生器;
加湿器;
呼吸导管;
未密封的接口,该接口联接到该呼吸导管以向患者递送气流;
传感器,该传感器被配置为确定该气流的压力或流量;
控制器,该控制器被配置为控制该流发生器以产生该气流并且将该气流提供到流量设定点,并且该控制器被配置为:
a)获取与该呼吸导管中的气体流量和/或压力相关联或指示其的至少一个第一信号;
b)针对该获取的至少一个第一信号的至少一部分来确定与气体流量扰动和/或压力扰动相关联的至少一个第一参数的测量值;以及
c)至少部分地基于满足第一阈值的该至少一个第一参数的该或这些测量值来确定在该呼吸导管中存在液体。
根据本披露的另一方面,提供了一种压力递送系统,包括
流发生器;
呼吸导管;
密封接口,该密封接口联接到该呼吸导管以将气流从该流发生器递送到患者;
传感器,该传感器被配置为确定该气流的压力和/或流量;
控制器,该控制器被配置为控制该流发生器以产生该气流至设定压力;
该控制器被配置为:
a)获取与该呼吸导管中的气体流量和/或压力相关联或指示其的至少一个第一信号;
b)针对该获取的至少一个第一信号的至少一部分来确定与这些气体流量扰动和/或这些压力扰动相关联的至少一个第一参数的测量值;以及
c)至少部分地基于满足第一阈值的该至少一个第一参数的该或这些测量值来确定在该呼吸导管中存在液体。
该压力递送系统可以包括加湿器。
该压力递送系统可以提供恒定的气道正压治疗或者可以提供双水平压力治疗。
该系统可以包括加湿器加热器和/或呼吸导管加热器,其中,如果检测到液体,则该控制器被配置为控制该加湿器加热器和/或该呼吸导管加热器以便至少部分地使该呼吸导管中的液体蒸发。
该控制器可以被配置为检测液体并且增加该呼吸导管加热器的功率以至少部分地使该液体蒸发。
该控制器可以被配置为检测液体,该控制器被配置为减少到该加湿器加热器的功率并且增加该呼吸导管加热器的功率以至少部分地使该液体蒸发。
该流发生器可以包括鼓风机,该控制器被配置为增加该鼓风机的功率以增加鼓风机速度,使得提供高流量的气体以至少部分地使该液体蒸发。
本发明的应当在其所有的新颖性方面加以考虑的其他方面将根据以下描述变得显而易见。
附图说明
现在将参考附图通过实例来描述本发明的多个实施例,在附图中:
图1A至图3B示出了被配置为向用户提供呼吸治疗的示例性呼吸治疗系统。
图4A示意性地示出了被配置为向用户提供呼吸治疗的附加示例性呼吸治疗系统。
图4B是具有处于适当位置的加湿室和提起的手柄/杆件的示例性呼吸治疗系统的左前透视图。
图4C是图2的呼吸装置的主外壳的上机壳部件和下机壳部件的分解视图。
图4D是主外壳的下机壳的左前侧透视图,示出了加热板组件和其他内部部件。
图5是根据依据本披露的实施例的呼吸治疗系统的示意图;
图6是示出呼吸导管中的气体流量和压力信号中发现的扰动的间歇阶段的实例的图示;
图7是示出一段时间内呼吸导管中的相应的原始流量、预估流量和压力信号以及相关扰动的间歇阶段的另一实例的图示;
图8是示出一段时间内呼吸导管中的相应的原始流量、预估流量和压力信号以及相关扰动的间歇阶段的又一实例的图示;
图9是在吸气和呼气期间的第一信号以及检测到的相关扰动幅值的图示;
图10a是与呼吸导管中的气流相关联的第一信号随时间变化的图示的实例;
图10b展示了10a的第一信号的频谱图;
图11a是与呼吸导管中的气流相关联的第一信号随时间变化的图示的另一实例;
图11b展示了11a的第一信号的频谱图;
图12a是与呼吸导管中的气流相关联的第一信号随时间变化的图示的又一实例;以及
图12b展示了12a的第一信号的频谱图。
图13是示出呼吸导管中的原始流量信号对示出所述原始流量信号的扰动强度的流量信号的经滤波版本的图示;
图14是示出图13的原始流量信号和经滤波版本以及发现检测到在呼吸导管中积聚的水的相关联的时间部分的图示;
图15是示出与气体流量相关联的第一信号以及用于指示在相关联的呼吸导管中检测到水的相关联的识别触发和循环标志的图示。
具体实施方式
呼吸治疗系统典型地用于治疗呼吸病症,例如像阻塞性睡眠呼吸暂停(OSA);慢性阻塞性肺疾病(COPD)、呼吸窘迫或任何其他呼吸疾病。
本披露内容涉及用于治疗任何呼吸病症的任何呼吸治疗系统100。通常,呼吸治疗系统从气体源(例如流量或压力发生器和/或呼吸机)向连接到患者的患者接口供应持续气道正压(CPAP)或双水平气道压力。通常,患者接口在鼻部和/或口部上或者它们周围产生至少实质性的密封。
呼吸治疗系统100包括吸气流动路径和呼气流动路径,呼吸气体经由患者接口沿着该吸气流动路径从气体源递送到患者,呼出气体沿着该呼气流动路径从患者流出。吸气流动路径和呼气流动路径可以是相同的,即吸气流动路径和呼气流动路径的至少一部分例如经由呼吸导管是共用的,如下文进一步阐述的。然而,在其他配置中,吸气流动路径和呼气流动路径通常不同。
气体源的实例包括加压气体源或呼吸机,或包括鼓风机(典型地包括叶轮和马达)的流量或压力发生器。
流发生器通常包括由电机驱动的叶轮。通过电机使叶轮旋转产生可呼吸的气流,该气流被经由吸气流动路径、一个或多个呼吸导管、一个或多个导管连接器以及患者接口从流发生器驱动到患者。流发生器可以与呼吸治疗系统的其他部分集成,诸如控制器和在递送给患者之前加湿可呼吸的气流的加湿器。在其他实例中,流发生器是单独的部件,其可以具有专用控制器,并且通过合适的导管和导管连接器连接到呼吸治疗系统的其他部件。
气体源与患者之间的流动路径通常被称为呼吸回路。呼吸回路可以包括一个或多个呼吸支路。包括呼吸回路的吸气部分的呼吸支路的部件可被称为系统的吸气支路。这种呼吸回路可以包括吸入气体递送导管的一个或多个部分,例如下文阐述的呼吸导管,以及一个或多个连接器,该一个或多个连接器将可呼吸气体源与向患者递送可呼吸气体的患者接口之间的导管的该或这些部分连接。可以在气体源与呼吸回路之间设置加湿器以对可呼吸气体进行加湿。来自患者的呼出气体可以从患者接口沿着例如由呼吸导管形成的呼气流动路径流动,如下文进一步阐述的。替代性地,来自患者的呼出气体可以排放到大气中。呼出气体可以通过患者接口中的一个或多个排气孔排出。例如,CPAP和双水平呼吸治疗系统仅包括吸气回路,其中,呼出气体经由患者接口中的通气口排放到大气中。在包括的情况下,包括呼吸回路的呼气部分的呼吸支路的部件可以称为呼气支路。这种呼气支路可以包括呼气导管(例如下文阐述的呼吸导管)的一个或多个部分和连接器的组合。因此,呼吸回路可以向患者递送加热和加湿的空气。
能够控制可呼吸气流的流量和/或压力以便为患者实现期望的治疗是重要的。为此,已知在气体递送路径中提供一个或多个传感器,其输出由控制器处理以改变可呼吸气流的流量和/或压力。此类传感器可以包括流量传感器或压力传感器或此类传感器的任何组合。在一个实例中,提供了传感器,该传感器测量并产生指示通过系统的某些部分的可呼吸气体的动态压力的信号。处理该动态压力信号以产生输出,该输出可以用于确定系统(或系统的部分)中气体的压力和/或流速。在一些情况下,也可以提供其他传感器,诸如湿度传感器。
示例性呼吸治疗系统的概述
根据本披露,呼吸治疗系统100可以包括被配置为向用户递送可呼吸气体的各种不同的设备和部件。此处的“系统”用于覆盖单个外壳或壳体,其中包含呼吸治疗所需的主要部件,或多个外壳或壳体,每个外壳或壳体均包含系统的某些部件。如本文使用的“系统”还涵盖了多个部件,这些部件可以以指定的布置进行连接以执行功能,例如为患者递送气流。此外,以下对“控制器”的任何引用都将被视为对控制系统的引用,该控制系统可以或可以不包括多个单独的控制器,每个控制器具有一个或多个电子处理器。例如,系统可以包括单个主控制器,该主控制器控制系统的各方面,包括本披露的新颖控制方面。替代性地,系统可以包括多个控制器,每个控制器控制系统的特定方面。一个或多个控制器可以远离系统的硬件。例如,在患者处的系统的硬件可以包括主控制器,其中,辅助控制器是远程的并且被配置为经由有线或无线通信与主控制器通信。
图1A至图1D示出了可以实现本文所述的特征的示例性呼吸治疗系统100。图1A至图1D中描述的各种系统中的每一个可以与本申请中稍后描述的特定特征一起使用。转向图1A,示出了从模块化辅助呼吸单元和加湿器系统接收空气的用户1303的示意图。导管1341从辅助呼吸单元或鼓风机单元1301a向加湿器室1302a提供加压空气。模块化辅助呼吸单元和加湿器系统中的加热板组件可以与加湿器室1302a接触以加热室1302a中的水。通过加湿器室1302a的气体可以被加湿和加热。加湿、加热和加压的气体经由吸气导管1321离开加湿器室1302a,并且经由用户接口1304提供给患者或用户1303。图1A所示的用户接口1304是鼻罩,其覆盖用户1303的鼻子。然而,应当注意的是,在这些类型的系统中,可以用全面罩、鼻插管、气管造口术配件、鼻枕、口腔接口或任何其他合适的用户接口来代替所示的鼻罩。
图1B示出了从集成的鼓风机/加湿器单元1305接收空气的用户1303的示意图。除了加湿器室1302b已经与鼓风机单元1301b集成以形成集成单元1305之外,该系统通常以与图1A所示的模块化系统相同的方式操作。因此,集成的鼓风机/加湿器单元1305可以包括加热器板组件,该加热器板组件被配置为加热室1302b中的水。PCT申请WO 2008/056993中描述了集成单元的实例,该申请的全部内容通过援引并入本文。
辅助呼吸单元
现在将参考图1C和图1D描述示例性辅助呼吸单元或集成单元1306。图1A至图2D示出了示例性压力治疗装置,即控制气体以实现所需压力的装置,该压力是例如可由临床医生定义的规定压力或治疗压力。通过使用包括密封面罩的患者接口来产生压力。
集成单元1306可以包括两个主要部分:辅助呼吸或鼓风机单元1307和加湿单元1331。在使用时,可以包括加湿室的加湿单元1331通常被封闭在形成在集成单元1306的外壳中的壳体内。在展示的配置中,加湿单元1331的顶部部分没有被封闭在壳体1342内。鼓风机单元1307可以包括与加湿单元1331接触以加热加湿室内的水的加热板组件。
鼓风机单元1307具有外壳,该外壳通常是具有基本上竖直的侧壁和后壁以及略微向后成角度的正面的矩形块。在展示的实施例中,壁、底面和顶面都被制造并尽可能地连接以最小化接缝的产生。可以密封任何必要的接缝。该外壳通常封闭鼓风机单元1307的工作部件并形成鼓风机单元1307的一部分。
如图1C和图1D所示,用户接口位于所示集成单元1306的正面的下部分上,其中,控制显示器1309位于用户接口的正上方。用户接口可以包括控制旋钮1308。患者出口1325被示出从集成单元1306的后壁穿出。在展示的实施例中,在使用中,出口1325的自由端面朝向上以方便连接。然而,患者出口1325可以旋转到一侧或另一侧以将其移动或对准到更方便的位置中来进行存储或者提供更方便的使用位置。
展示的患者出口1325适于允许气动和电连接到导管的一端,例如导管(诸如图1B的吸气导管1321),其在单元1306与患者接口(例如图1B的接口1304)之间延伸。在美国专利号6,953,354中描述了可以使用的连接器类型和可以进行的双连接类型的实例,该申请的全部内容通过援引并入本文。应当注意,为了阅读本说明书的目的,患者接口通常可以被认为包括接口1304和吸气导管1321两者,其中,以这种方式阅读本说明书将是合适的。
集成单元1306可以包括进气口或进气端口(未示出)以从大气中吸入空气。入口端口或进气口也可以是适于从壁源、压力瓶等接收气体的连接器。集成单元1306还可以包括用于提供从进气口到加湿单元1331的加压空气流的机构。加压空气流机构可以包括风扇单元。通气口可以位于集成单元1306外表面上的任何方便的地方。通气口可以位于鼓风机单元1307的背面上。
空气沿着空气路径被输送或以其他方式引导穿过鼓风机单元1307的壳体,并被递送到加湿单元1331,在那里它被经加热的水加湿和加热,然后从加湿单元1331流出并向前到达鼓风机单元1307上的患者出口1325。经加热的加湿气体然后经由吸气导管1321和患者接口传递给用户1303,该患者接口可以包括本文披露的任何合适的患者接口实例。
出口端口或患者出口1325适于实现吸气导管1321的气动附接和经由电连接器的电连接两者。在图1C中,通常将装配到吸气导管1321的端部的导管连接器1334被示出连接到患者出口1325。出口端口或出口连接不必经由集成单元1306的外壳,如在所示的实施例中。相反,吸气导管1321的连接可以直接位于加湿单元1331的出口上。所展示的形式和变型通常可以称为连接机构。
集成单元1306还包含封装在壳体内的电子电路,该电子电路至少部分地包括控制器,诸如微处理器等,并且其提供控制信号以控制至少鼓风机单元1307以及优选地其他项目(诸如加湿单元1331)的一个或多个输出。控制电路还可以适于从系统中的传感器接收信号(例如,来自这些传感器的压力、流量、湿度和温度信号是适用的)并且相应地改变来自控制电路的输出。当用户控件被用户操纵时,控制电路还接收来自用户控件的信号并相应地改变输出信号。
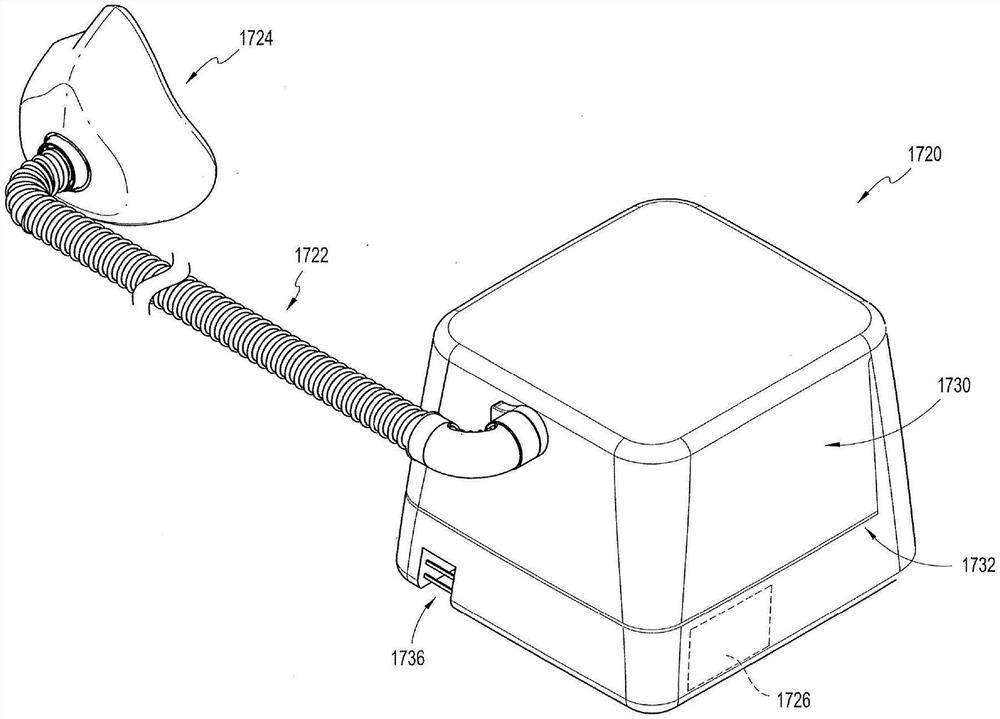
图2A至图2D示出了可以实现本文所述的特征的附加呼吸装置。同样,图2A至图2D中描述的各种系统中的每一个可以与本申请稍后描述的特定特征一起使用。转向图2A,示出了根据本发明的某些特征、方面和优点来布置和配置的呼吸辅助设备1720。在展示的配置中,呼吸辅助设备1720连接到吸气导管1722并且吸气导管1722连接到患者接口1724,诸如呼吸面罩等。可以使用任何合适的患者接口1724。
呼吸辅助设备1720被配置为通过导管1722和患者接口1724向用户递送加压呼吸气流。因此,所展示的呼吸辅助设备1720可以包括鼓风机单元1726,其已在图2A中示意性地展示。鼓风机单元1726可以具有任何合适的构造。鼓风机单元将环境空气吸入呼吸辅助设备1720中并产生加压呼吸气流。
呼吸辅助设备1720还被配置为在向用户递送之前对加压呼吸气流进行加湿。因此,如图2B所示,所展示的呼吸辅助设备1720还可以包括加湿室1728。加湿室1728是可以从呼吸辅助设备1720上移除的。任何合适的构造都可以用于加湿室1728。加湿室1728可以被配置成容纳一定体积的液体,诸如水。加压呼吸气流可以穿过该体积的液体而通往用户,从而可以增大加压呼吸气流的湿度。
如图所示,呼吸辅助设备1720通常可以包括主体1730。参考图2D,主体1730可以包括上部外壳1732和下部外壳1734。上部外壳1732和下部外壳1734可以以任何合适的方式固定在一起。在一些配置中,下部外壳1734的底部可以被另一个盖件封闭。
继续参考图2D,下部外壳1734可以包括空气入口1736,鼓风机单元1726通过该空气入口吸入空气。鼓风机单元1726可以安装到下部外壳1734或安装在下部外壳内。下部外壳1734还可以支撑加热板组件1738。加湿室1728内的液体可以通过与加热板组件1738的相互作用而被加热。在一些配置中,加湿室1728可以搁置在加热板组件1738的加热板上。其他构型也是可能的。
图3A和图3B示出了可以实现本文描述的特征的另外的呼吸装置实例。图3A和图3B中描述的各种系统中的每一个可以与本申请中稍后描述的特定特征一起使用。图3A和图3B示意性地展示了加湿系统2100的实例,在一些应用中,该加湿系统可以与呼吸疗法、正压设备、无创通气、有创通气、外科手术(包括但不限于腹腔镜手术)等一起使用。所希望的是,加湿系统2100可以适于向一定量的气体供应湿气或蒸汽。加湿系统2100可以用于呼吸机、鼻高流量系统、连续的、可变的或双水平的气道正压通气(PAP)系统或者其他形式的呼吸疗法。在一些配置中,加湿系统2100可以整合到递送任何这些类型的疗法的系统中。
加湿系统2100的实例可以包括加热器底座单元2102和加湿室2104。加热器底座单元2102可以包括加热板组件2108。加湿室2104可以被配置为容纳一定体积的液体,诸如水。加热板组件2108可以被配置为加热保持在加湿室2104内的一定体积的液体以产生蒸汽。
加湿室2104是从加热器底座2102可移除的,从而允许更容易地对加湿室2104进行消毒或处置。加湿室2104的主体可以由非传导玻璃或塑料材料形成,但是加湿室2104也可以包括传导部件。例如,加湿室2104可以包括与加热器底座单元2102上的加热板组件2108接触或相关联的高导热性底座(例如,铝底座)。
加热器底座单元2102还可以包括电子控件。在该实例中,加热器底座单元2102包括主控制器2025。主控制器2025可以包括电子、模拟或数字处理器或控制器。优选地,主控制器2025包括基于微处理器的控制器,该控制器被配置为执行存储在相关联的存储器中的计算机软件命令。响应于例如经由用户接口2133输入的用户设置的湿度或温度值以及其他输入,主控制器2025确定何时(或以何种水平)对加热板组件2108的加热元件进行供能,以便对加湿腔室2104内的液体进行加热。
加湿系统2100还可以包括气体供应源2125。在一些配置中,气体供应源2125可以包括呼吸机、鼓风机单元、或者适用于呼吸或在医疗程序中使用的任何其他适合的加压气体源。气体供应源2125可以与加热器底座2102分离或结合。
例如,如图3B所示,干燥或相对干燥的气体或环境空气通过通气口2119进入气体供应源2125。风扇2121可以凭借抽吸空气或其他气体通过通气口2119来改善进入该气体供应源的气流。例如,风扇2121可以是可变速风扇,在这种情况下控制器2023控制风扇速度。具体地,控制器2023的功能可以由主控制器2025响应于来自主控制器2025的输入以及经由拨盘2027的压力或风扇速度的用户设置的预定需要值(预设值)来控制。
加湿系统还可以包括呼吸回路2123。呼吸回路2123可以包括吸气导管2120。吸气导管2120的腔室端可以被配置成连接到加湿室2104的出口端口2412上。吸气导管2120的患者端可以被配置成例如经由患者接口2128连接到患者。在一些配置中,吸气导管2120可以直接联接到患者接口2128上。可以结合任何适合类型的患者接口2128。患者接口是广义术语,并且对本领域的普通技术人员给出了它的普遍并且惯常的含义(也就是说,它不限于特殊或自定义的含义),并且包括但不限于遮罩(诸如气管罩、面罩以及鼻罩)、插管以及鼻枕。
温度探头2135可以在患者接口2128附近连接到吸气导管2120上,或直接连接到患者接口2128上。温度探头2135监测患者接口2128附近或该患者接口处的温度。
加热元件(未示出),例如与温度探头相关联的加热元件或不与温度探头相关联的加热元件,可以用于调节患者接口2128和/或吸气管2120的温度,以便将吸气导管2120和/或患者接口2128的温度升高到高于饱和温度,由此减少不想要的冷凝的机会。
在其中气体供应源2125与加热器底座单元2102分离的一些配置中,呼吸回路2123可以包括供应导管2132。供应导管2132的气体供应端可以被配置成连接到气体供应源2125的输出端上。供应导管2132的腔室端可以被配置成连接到加湿室2104的入口端口2410上。
在一些配置中,诸如与呼吸机一起使用的那些配置,呼吸回路2123还可以包括呼气导管2122。呼气导管2122的用户端可以被配置成连接到患者接口2128上,并且呼气导管2122的气体供应端可以被配置成连接到气体供应源2125的回路管道(return)上。呼气导管2122可以具有与它整合的温度探头和/或加热元件(如上文关于吸气导管2120所描述的),从而减少冷凝的机会。此外,呼气导管2122不需要使呼出气体返回到气体供应源2125。在一些配置中,呼出气体可以被直接排送到周围环境或其他辅助设备,诸如空气净化器/过滤器(未示出)。可以完全省略呼气导管2122。
如图3A所示,吸气导管2120和呼气导管2122的用户端可以经由Y形件2124彼此连接。Y型件2124可以连接到患者供应导管2126上。在一些配置中,患者供应导管2126可以包括例如但不限于导管安装件。患者供应导管2126可以连接到患者接口2128上。Y形件2124可以在无患者供应导管2126介入的情况下联接到患者接口2128上。该图示出了患者供应导管2126可以包括加热丝。替代性地,患者供应导管2126可以不加热。在另外的配置中,患者供应导管2126可以是不加热的、可呼吸的管。
在使用中,加湿室2104被安装在加热板组件2108的加热板上。加热板组件2108对加湿室2104中的液体、诸如水进行加热以产生蒸汽。干燥或相对干燥的气体从气体供应源2125流过供应导管2132并且通过入口端口2410进入加湿室2104中。这些气体在加湿室2104中的液体上方经过并且由蒸汽加湿。加湿气体通过出口端口2412离开加湿室2104并且通过吸气导管2120流动到患者2101。患者2101呼出的气体可以通过呼气导管2122返回到气体供应源2125。呼吸回路2123的任何或所有部件可以包括加热元件,例如加热丝2127,以便帮助将这些气体维持在所希望的温度下并且降低这些导管中的大量冷凝形成的可能性。
在使用之前,操作员(诸如医护人员)将连接这些不同部件以装配加湿系统2100。由于部件的多样性和所形成的连接的数目,对加湿系统2100进行装配可能是复杂的过程。在一些情况下,提供了特殊训练来提高正确装配的可能性。加湿系统2100可以包括用于简化装配过程并且降低不正确装配的可能性的不同特征。例如,加湿系统2100的部件可以包括用于在部件之间提供更容易的且更安全的连接、促进正确连接、并且减少需要手动或单独进行的连接的数目的特征。
图4A中提供了示例性呼吸治疗系统100的示意图。该系统递送流量疗法,例如高流量疗法。该接口优选地是非密封的接口,例如以非密封方式接合患者鼻孔的鼻插管。替代性地,该接口可以是具有泄漏的气管接口。呼吸治疗系统100可以包括主装置外壳1001。主装置外壳1001可以包含可以为马达/叶轮布置的形式的鼓风机单元11、可选的加湿器或加湿室12、控制器13以及用户界面14。用户界面14可以包括显示器以及一个或多个输入装置,诸如一个或多个按钮、触摸屏、触摸屏与一个或多个按钮的组合等。控制器13可以包括一个或多个硬件和/或软件处理器,并且可以被配置或编程用于控制该设备的部件,包括但不限于操作鼓风机单元11以产生用于递送给患者的气流、操作加湿室12(如果存在)以加湿和/或加热气流、接收来自用户界面14的用户输入以便对呼吸治疗系统100进行重新配置和/或用户定义的操作、以及(例如,在显示器上)向用户输出信息。用户可以是患者、医疗保健专业人员或其他人。
继续参考图4A,吸气导管16可以联接到呼吸治疗系统10的主装置外壳1001中的气流出口21,并且联接到患者接口17(诸如非密封接口,如具有歧管19和鼻叉18的鼻插管)。吸气导管16也可以联接到面罩、鼻罩、鼻枕罩、气管内导管、气管造口术接口等。
气流可以由鼓风机单元11产生,并且可以在经由吸气导管16通过患者接口17递送至患者之前进行加湿。控制器13可以控制鼓风机单元11以产生期望流速的气流、和/或控制一个或多个阀以控制空气和氧气或其他可呼吸气体的混合。控制器13可以控制加湿室12下方的加热元件将气体加热至期望的温度,该期望的温度实现用于递送至患者的温度和/或湿度的期望的水平。吸气导管16可以具有加热元件16a,诸如加热丝,以加热穿行至患者的气流。加热元件16a也可以受控制器13的控制。
系统100可以使用与控制器13通信的一个或多个超声换能器、一个或多个热敏电阻、一个或多个压力传感器、一个或多个温度传感器、一个或多个湿度传感器或其他传感器,以便以提供适当疗法的方式来监测气流的特征和/或操作系统100。气流特性可以包括气体的浓度、流速、压力、温度、湿度或其他。诸如流量、温度、湿度和/或流量传感器的传感器3a、3b、3c、20、25可以放置在主装置外壳1001、吸气导管16和/或患者接口17中的不同位置中。控制器13可以接收来自传感器的输出,以帮助其以提供适当疗法的方式来操作呼吸治疗系统100,诸如用于确定气流的合适的目标温度、流速和/或压力。提供适当疗法可以包括满足患者的吸气需求。
系统100可以包括无线数据发射器和/或接收器或收发器15,以使控制器13能够以无线方式从操作传感器接收数据信号8和/或控制系统100的各种部件。此外或替代性地,数据发射器和/或接收器15可以将数据递送到远程服务器或实现对系统100的远程控制。系统100可以包括例如使用缆线或电线的有线连接,以使控制器13能够从操作传感器接收数据信号8和/或控制系统10的各种部件。
呼吸治疗系统100可以用于多种应用。例如,呼吸治疗系统100可以用于以下任何呼吸装置:持续气道正压(CPAP)装置、呼吸机、加湿器、高流量治疗装置、手术加湿器(例如,吹入器)、它们的组合等。
阻塞性睡眠呼吸暂停症的CPAP治疗涉及使用吸气导管和患者接口(诸如面罩)将加压的可呼吸气体(通常是空气)递送到用户的气道。用于CPAP的气体压力通常在约4cmH2O至约28cm H2O的范围内,流速高达约180L/min(在患者接口处测量),这取决于用户的要求。加压气体充当用户气道的气动夹板。因此,加压气体降低了气道塌陷的可能性。
图4A至图4D示出了具有主外壳1001的呼吸治疗系统100的示例性呼吸装置,其可以实现本文所述的特征。主外壳1001具有主外壳上机壳102和主外壳下机壳202。主外壳上机壳102具有外周壁布置106(参见图4C)。外周壁布置限定了加湿器或加湿室隔间108以用于接纳可移除的加湿室300。可移除的加湿室300容纳了诸如水等合适的液体,以用于加湿可以被递送给患者的气体。
在所示形式中,主外壳上机壳102的外周壁布置106可以包括:基本上竖直的左侧外壁110,该左侧外壁在主外壳1001的前后方向上定向;基本上竖直的左侧内壁112,该左侧内壁在主外壳1001的前后方向上定向;以及互连壁114,该互连壁在左侧外壁110的上端与左侧内壁112的上端之间延伸并且互连这些上端。主外壳上机壳102可以进一步包括:基本上竖直的右侧外壁116,该右侧外壁在主外壳1001的前后方向上定向;基本上竖直的右侧内壁118,该右侧内壁在主外壳1001的前后方向上定向;以及互连壁120,该互连壁在右侧外壁116的上端与右侧内壁118的上端之间延伸并且互连这些上端。这些互连壁114、120朝向主外壳1001的相应外边缘成角度,但可以替代性地是基本上水平的或向内成角度。
主外壳上机壳102可以进一步包括基本上竖直的后外壁122。主外壳上机壳102的上部部分可以包括向前成角度的表面124。表面124可以具有用于接纳显示器和用户界面模块14的凹陷部126。显示器可以被配置为实时地显示感测到的一种或多种气体的特性。互连壁128可以在后外壁122的上端与表面124的后边缘之间延伸并且互连该上端与该后边缘。
基本上竖直的壁部分130可以从表面124的前端向下延伸。基本上水平的壁部分132可以从壁部分130的下端向前延伸以形成凸缘。基本上竖直的壁部分134可以从壁部分132的前端向下延伸并且终止于加湿室隔间108的基本上水平的底板部分136。左侧内壁112、右侧内壁118、壁部分134以及底板部分136一起可以限定加湿室隔间108。加湿室隔间108的底板部分136可以具有凹陷部138,以接纳用于加热加湿室300中的液体以供在加湿过程期间使用的加热器布置,诸如加热板组件140或其他适合的加热机构。
主外壳下机壳202可以通过适合的紧固件或者一体的附接特征(例如像夹子)是可附接到上机壳102上的。主外壳下机壳202可以包括:基本上竖直的左侧外壁210,该左侧外壁在主外壳1001的前后方向上定向并且与上机壳102的左侧外壁110毗连;以及基本上竖直的右侧外壁216,该右侧外壁在主外壳1001的前后方向上定向并且与上机壳102的右侧外壁116毗连。主外壳下机壳202可以进一步包括基本上竖直的后外壁222,该后外壁与上机壳102的后外壁122毗连。
外壳下机壳202可以具有唇缘242,该唇缘与外壳上机壳102的唇缘142毗连并且还形成该凹陷部的用于接纳杆件500的手柄部分506的一部分。下唇缘242可以包括指向前方的突起243,该突起充当杆件500的手柄部分506的固位件。代替杆件500,该系统可以具有弹簧加载的防护件,以将加湿室300固位在加湿室隔间108中。
外壳下机壳202的底侧可以包括底壁230。相应互连壁214、220、228可以在基本上竖直的壁210、216、222与底壁230之间延伸并且互连这些壁与该底壁。底壁230可以包括具有多个孔的格栅232以使得能够在从加湿室300泄露(例如,由于溢出)的情况下排出液体。底壁230还可以包括长形的前后定向的狭槽234。狭槽234还可以使得能够在从加湿室300泄露的情况下排出液体,而不使液体进入电子器件外壳。在所示的构型中,狭槽234相对于格栅232的孔可以是宽的和长形的,以最大化液体的排出。
下机壳202可以具有用于接纳马达和/或传感器模块的马达凹陷部250。马达和/或传感器模块可以是不可从主外壳1001移除的。马达和/或传感器模块是可以从主外壳1001(未示出)可移除的或不可移除的。除了气流通道,所有壁和顶板262可以是连续的、气体不可渗透的且未中断的。因此,除了气流通道,整个马达凹陷部250可以是气体不可渗透的且未中断的。
马达和/或传感器模块可以是可插入凹陷部250中的并且可以是可附接到下机壳202上的。在将马达和/或传感器模块插入到下机壳202中后,气流通道管264可以延伸穿过向下延伸管133并且被软密封件密封。
加湿室300可以如下地流体联接到设备10:通过加湿室300从外壳1001的前部处的位置在朝向外壳1001后部的方向上进入加湿室隔间108中的在向后方向上的线性滑入运动。气体出口端口322可以与马达流体连通。
加湿室气体入口端口306可以与气体出口端口322互补,并且加湿室气体出口端口308可以与气体入口端口340互补。这些端口的轴线可以彼此平行,以便使得加湿室300能够以线性移动被插入到室隔间108中。呼吸装置可以具有与马达流体连通的空气和氧气(或替代性辅助气体)入口,以使得马达能够将空气、氧气(或替代性辅助气体)或其混合物递送至加湿室300,并且从而递送至患者。
如图4D所示,外壳下机壳202可以包括合适的电子器件板272,诸如感测电路板。电子器件板可以邻近外壳下机壳202的相应外侧壁210、216定位。电子器件板272可以容纳适合的电气或电子部件或与其电连通,该电气或电子部件是诸如但不限于微处理器、电容器、电阻器、二极管、运算放大器、比较器以及开关。传感器可以与电子器件板272一起使用。电子器件板272的部件(诸如但不限于一个或多个微处理器)可以充当该设备的控制器13。
电子器件板272中的一者或两者可以与设备100的电气部件(包括显示单元和用户界面14、马达、阀以及加热板组件140)电连通,以便操作马达来提供气体的期望流速、操作加湿室12来将气流加湿并加热到适当的水平、并且向该气流供应适当量的氧气(或适当量替代性辅助气体)。
电子器件板272可以与从外壳上机壳102的后壁122突起的连接器布置274电连通。连接器布置274可以联接到警报器、脉搏血氧仪端口和/或其他适合的附件。电子器件板272还可以与还可以设置在外壳上机壳102的后壁122中的电连接器276电连通,以向该装置的部件提供干线电力或电池电力。
如上所述,操作传感器(诸如流量、温度、湿度和/或压力传感器)可以被放置在呼吸装置、吸气导管16和/或插管17中的不同位置中。电子器件板272可以与那些传感器电连通。当该系统是高流量治疗系统时,来自传感器的输出可以由控制器13接收,以辅助控制器13以提供包括满足吸气需求的最佳治疗的方式来操作呼吸治疗系统100。
如上所述,电子器件板272以及其他电气和电子部件可以与气体流动路径气动隔离以提高安全性。这种密封还防止水进入。
根据本披露的呼吸治疗系统100的另一个实例包括高流量治疗系统。本文所讨论的高流量治疗旨在被赋予本领域技术人员所理解的其典型的普通含义,其通常指的是呼吸辅助系统,该呼吸辅助系统经由有意未密封的患者接口以总体上旨在满足或超过患者的吸气流量的流速递送目标流量的加湿的呼吸气体。典型的患者接口包括但不限于鼻或气管患者接口。成人的典型流速的范围通常在(但不限于)每分钟约十五升(LPM)到每分钟约七十升或更大。小儿患者(诸如新生儿、婴儿和儿童)的典型流速的范围通常在(但不限于)每千克患者体重每分钟约一升至每千克患者体重每分钟约三升或更大。高流量治疗还可以任选地包括气体混合物组合物,该气体混合物组合物包括补充氧气和/或施用治疗药物。高流量治疗通常指经鼻高流量氧疗(NHF)、湿化高流量鼻插管氧疗(HHFNC)、高流量鼻导管氧疗(HFNO)、高流量疗法(HFT)或经气管高流量氧疗(THF)等等。用于实现“高流量”的流速可以是以下列出的流速中的任一者。例如,在一些配置中,对于成人患者,“高流量治疗”可以指代以以下流速将气体递送到患者:大于或等于约10升/分钟(10LPM),诸如在约10LPM与约100LPM之间、或在约15LPM与约95LPM之间、或在约20LPM与约90LPM之间、或在约25LPM与75LPM之间、或在约25LPM与约85LPM之间、或在约30LPM与约80LPM之间、或在约35LPM与约75LPM之间、或在约40LPM与约70LPM之间、或在约45LPM与约65LPM之间、或在约50LPM与约60LPM之间。在一些配置中,对于新生儿、婴儿或儿童患者,“高流量治疗”可以是指以以下流速向患者递送气体:大于1LPM,诸如在约1LPM与约25LPM之间、或在约2LPM与约25LPM之间、或在约2LPM与约5LPM之间、或在约5LPM与约25LPM之间、或在约5LPM与约10LPM之间、或在约10LPM与约25LPM之间、或在约10LPM与约20LPM之间、或在约10LPM与15LPM之间、或在约20LPM与25LPM之间。用于成人患者、新生儿、婴儿或儿童患者的高流量疗法设备可以以约1LPM与约100LPM之间的流速或以上文列出的任何子范围中的流速向患者递送气体。流量治疗设备10可以以在约1LPM与约100LPM之间的任何流速递送高达100%的任何浓度的氧气(例如,FdO2)。在一些配置中,这些流速中的任一者都可以与约20%至30%、21%至30%、21%至40%、30%至40%、40%至50%、50%至60%、60%至70%、70%至80%、80%至90%和90%至100%的氧气浓度(FdO2)相组合。在一些组合中,流速可以在约25LPM与75LPM之间并与约20%至30%、21%至30%、21%至40%、30%至40%、40%至50%、50%至60%、60%至70%、70%至80%、80%至90%和90%至100%的氧气浓度(FdO2)相组合。在一些配置中,流量治疗设备10可在以手动模式操作时包括安全阈值,这些安全阈值防止用户将太多氧气递送到患者。
高流量治疗可以施用到用户的鼻孔和/或口服、或经由气管造口接口来施用。高流量治疗可以以处于或超过预期用户的峰值吸气流量要求的流速将气体递送到用户。高流量治疗可以在鼻咽中产生冲洗效果,使得上气道的解剖死腔被进入的高气流冲洗。这可以产生出可供用于每次呼吸的新鲜气体储备,同时最小化对氮气和二氧化碳的再呼吸。另外,当试图控制患者的FdO2时,满足吸气需求和冲洗气道是重要的。
高流量治疗可以利用不密封的患者接口(例如像鼻插管)来递送。鼻插管可以被配置为以超过预期用户的峰值吸气流量要求的流速将呼吸气体递送到用户的鼻孔。
如本文中所使用的术语“非密封的患者接口”可以指代在患者的气道与不完全堵塞患者的气道的气流源(诸如来自流发生器11)之间提供气动链路的接口。非密封的气动链路可以包括小于患者的气道的约95%的堵塞。非密封的气动链路可以包括小于患者的气道的约90%的堵塞。非密封的气动链路可以包括在患者的气道的约40%与约80%之间的堵塞。气道可以包括患者的鼻孔或口部中的一个或多个。对于鼻插管,气道穿过鼻孔。
为了防止“凝结沉降”(在呼吸回路中形成冷凝物),可以对吸气导管进行隔热和/或加热(例如通过可选地包括加热丝的加热器),以至少最小化沿着吸气支路流动的可呼吸气体的温度下降。
然而,一个或多个呼吸支路的全部或部分可以不被加热。例如,可以不加热呼吸回路的呼气支路,因为这对患者没有益处并且将加湿空气再递送到呼吸机可能会导致损坏。因此,气体中的冷却水蒸气可以在呼气支路中冷凝。呼气支路中的这种冷凝物可能进入呼吸机,从而对呼吸机造成损坏。
本发明披露的一个方面是利用与呼吸导管(例如吸气导管、呼气导管或共用吸气和呼气导管)中的气体流量和/或压力相关联或指示其的至少一个信号,以用于检测出在呼吸导管中存在液态水,并且因此使用该检测来生成用于控制呼吸治疗系统100的输出控制信号,例如像上文关于图1至图4D所描述的。该检测可以用于被配置为向用户递送可呼吸气体的任何呼吸治疗系统中。液态水存在于呼吸导管中的确定可以用于更好地控制呼吸治疗系统100的诸如加热器或加湿器等部件的操作设置,以便减少液态水的存在。例如,在确定呼吸导管中存在液态水时,通过增加呼吸导管内的温度,例如通过控制加热器的操作设置,一部分液态水将转变为气相并与其他气体一起离开呼吸导管,从而减少了呼吸导管中的液态水的体积。为了不对系统部件施加不必要的应力,并且保持整体系统功耗相对较低,可能希望仅在暂时的时间段内维持呼吸导管中的较高温度,至少直到可能不再检测到存在液态水为止。
如果检测到液体冷凝物,例如液态水,加热丝被控制以在一段时间内加热到更高的功率,例如最大功率,以尝试并使液体冷凝物蒸发。替代性地或附加地,加热板功率可以被控制为降低,或者可以被关闭。加热板电源可以在一段时间内被降低或者可以被关闭。加热板可以被控制为降低的功率或者关闭以便降低湿度输出。例如,可以关闭加热板以减少湿度输出并且可以将加热丝加热到最大功率以便使液体冷凝物蒸发。
在包括鼓风机的呼吸装置或系统中,加热板和呼吸导管加热器可以如先前描述地被控制。此外或替代性地,鼓风机可以被控制以在一段时间内以最大马达速度供电,以便至少部分地干燥呼吸导管,即,使液体冷凝物蒸发或沿着呼吸导管移动。
换句话讲,该系统被配置成使得如果检测到液体冷凝物,则控制器产生响应,该响应用于控制系统的一个或多个部件。
呼吸装置或系统可以包括显示器,例如像触摸屏显示器。如果检测到液态水,则可以生成消息或警报并将其显示在显示器上。警报可以包括视觉、听觉或触觉警报中的任何一种或多种。当检测到液体冷凝物时,响应于显示器从控制器接收一个或多个控制信号,可以生成警报消息或警报图像并将其呈现在显示器上。
呼吸装置或系统可以根据以下控制协议中的任何一个或多个操作:
o鼓风机速度增加,加热板功率不变,并且加热丝功率增加。呼吸导管加热丝功率可以增加到最大值并且鼓风机速度可以增加到阈值以上。该阈值足以促进管的干燥。加热丝最大功率和高于阈值的鼓风机速度的组合可以有助于干燥呼吸导管并且通过蒸发去除冷凝物。
o鼓风机速度增加,加热板功率降低或关闭,并且加热丝功率增加。例如,加热丝功率可以增加到最大值。鼓风机速度可以增加到阈值以上。加热丝最大功率和高于阈值的鼓风机速度的组合可以有助于干燥管并且通过蒸发去除冷凝物。可以关闭加热板以便降低湿度输出。
o加热板关闭并且呼吸导管加热丝功率增加例如到最大,并且鼓风机在第一流速与第二流速之间循环。加热丝处于最大值并且鼓风机循环也可以有助于使冷凝物蒸发。
o可以向用户界面提供指令,例如指令消息或消息序列,包括文本和/或视频和/或一系列图像,其展示了如何断开呼吸回路并排出至少一些液体冷凝物。
当行进穿过呼吸导管的气体经过部分阻塞呼吸导管的液态水时,作为水与气体之间的气体相对移动的结果,可以在水气界面处形成压力和/或流动波。压力和/或流动波可以形成汩汩声或冒泡声或者其他不规则的声音。压力和/或流动波对行进穿过呼吸导管的气体的流量和/或压力有影响,从而由于积聚在呼吸导管中的水而在相关联的流量和/或压力数据中形成扰动,诸如尖峰。
本披露是基于对利用这些扰动来检测存在于呼吸治疗系统100的呼吸导管中的水的可能性的实现。
因此,一般而言,本披露提供了用于至少部分地基于相关扰动来检测呼吸导管中的水的装置。
我们已经发现,从呼吸导管中积聚的水中检测到的气体流量和/或压力模式可以与由打鼾产生的或指示打鼾的那些模式区分开来。
我们进一步发现,与和呼吸导管的水积聚相关扰动频率相比,打鼾与更高的扰动频率相关联。此外,打鼾模式不包含我们已经确定可能在与呼吸导管中的水积聚相关联的流量和/或压力模式中观察到的短持续时间高幅值峰值或尖峰。考虑到这些发现,在一些配置中,可以将由打鼾引起的扰动与和呼吸导管中的水积聚相关联的那些扰动区分开来,并且相应地控制呼吸治疗系统100的一个方面。
检测与水相关扰动的一种方法可以是将呼吸导管的测量的气体流量与呼吸导管中的参考气体流量进行比较。
检测与水相关扰动的另一种方法可以是将呼吸导管中的测量的气体压力与呼吸导管的参考气体压力进行比较。
因此,可以通过知道呼吸导管的参考气体流量或压力来检测第一信号的气体流量和/或压力相关的扰动。该“参考”气体流量或压力取决于呼吸治疗系统设置的配置,如将在下文进一步阐述的。
参考图5,提供了系统100,该系统用于检测用于患者的呼吸治疗的呼吸导管中的水的积聚。系统100可以是呼吸治疗系统的补充或者包括呼吸治疗系统的整体部分。图5是上述任何呼吸治疗系统100的示意图,并且为了下文的描述的清楚而被包括在内。
如前所述,呼吸治疗系统100通常可以包括流发生器、加湿器、控制器、形成呼吸气体递送导管的呼吸导管(其可以或可以不被加热)、以及被配置为提供与患者的密封的或非密封的流体接口的患者接口,以便将呼吸气体递送到患者的一个或多个呼吸道。这些一起可以在流发生器与患者之间形成呼吸气体递送流动路径。传感器可以被设置在系统中的不同位置以测量呼吸气体的特性,并且生成传感器信号,控制器使用这些信号来控制呼吸气流的特性,诸如压力、流量、温度和湿度中的任何一个或多个。可选地,呼吸治疗系统100可以包括被配置为输送来自患者的呼出的呼吸气体的呼气导管。
系统100包括控制器1011。控制器1011可以包括呼吸治疗系统的控制器,或者一个或多个单独的控制器。控制器101通常可以包括由合适的硬件和软件控制的一个或多个微处理器。
控制器1011被配置为获取1011a与呼吸导管中的气体流量和/或压力相关联的至少一个第一信号。控制器1011被进一步配置为针对获取的至少一个第一信号的至少一部分确定1012a与气体流量和/或压力相关的扰动相关联的至少一个第一参数的测量值。此外,控制器1011被配置为至少部分地基于满足第一阈值的至少一个第一参数的该或这些测量值来确定1013在呼吸导管中存在液态水。
应当理解,在这方面的液态水不属于在使用中存在于呼吸导管中的水滴或水蒸气。相反,液态水是指存在于呼吸导管中的液态水的集合或积聚,这可能是例如在使用中流过呼吸导管的气体的冷凝的结果。当液态水的收集或积聚已经达到足以至少局部地部分阻塞呼吸导管的体积时,可检测的流动扰动和/或压力扰动可能形成。在一些配置中,这些扰动可以通过汩汩声或冒泡声或其他独特的或可检测的声音来识别。
表达“满足”阈值应理解为满足或实现阈值。应当理解,在导出测量值之前的格式和/或计算形成用于定义阈值的参考点。
作为实例,考虑测量值与概率得分相关的情况,其中,计算所述概率得分使得它仅可以达到介于0和1之间或等于0和1的值,其中,1表示管中存在液态水,并且0表示管中不存在液态水。让我们假设实际概率得分为0.8,并且阈值设置为0.6,这表明所有等于或高于此数字的概率得分都指示存在液态水。然后在这种情况下,0.8的概率得分满足水存在阈值,因为0.8的概率得分高于0.6的阈值。
然而,通过修改先决条件,使得现在0指示管中存在液态水,并且1指示管中不存在液态水,计算需要进行修改。这将对阈值产生影响,在所有其他条件不变的情况下,阈值将被重新定义为0.4(即1-0.6),因此概率得分等于或小于将指示呼吸导管中存在液态水。在所有其他条件不变的情况下,实际概率得分将重新计算为0.2(即1-0.8)。因此,在这种情况下,概率得分将满足阈值,因为0.2小于阈值。
因此,在一些配置中,当测量值和相关联的阈值与值相关时,取决于基础计算及其先决条件,表达“满足”可以是“高于”、“等于或高于”、“低于”或“等于或低于”,这取决于先决条件设置。
当测量值和/或阈值与函数相关时,“满足”的相同基本解释适用,因为满足阈值的要求取决于基本计算及其先决条件。在一些配置中,控制器可以包括用于从外部装置接收第一信号的输入,例如在使用中可操作地联接到呼吸导管的传感器。相关联的传感器可以是流量传感器,其中第一信号与流量信号有关。替代性地或附加地,相关联的传感器可以是压力传感器,其中,第一信号与压力信号有关。这种传感器可以被配置为直接测量流量或压力,或者测量足以使该或另外的控制器可以从传感器输出确定流量或压力的气流的一个或多个其他特性。
控制器1011可以包括处理器和可选的存储器,以便执行存储在存储器上的软件可执行指令以执行本文披露的相关联的功能。在一些配置中,控制器1011可以作为独立单元提供。替代性地,控制器可以集成在呼吸治疗系统/装置的装置或控制器内,例如流发生器或流发生器控制器内。在一些配置中,在此呈现的软件可执行指令中的至少一些可以在两个或更多个处理器上执行。例如,第一处理器可以用于获取至少第一信号,并且确定至少一个第一参数的测量值,而第二处理器可以确定存在液态水。在一些配置中,相关联的处理器可以可操作地耦接。附加地或替代性地,可以从存储器访问作为用于由处理器执行特定软件可执行指令的输入所需的信息,该存储器可选地可操作地到耦接执行其他相关联的软件指令以提供所述输入的另一处理器。
气体流量扰动和/或压力扰动
与高于呼吸模式的频率相关联的气体流量扰动和/或压力扰动可以是在呼吸导管中存在液态水的指示。通常,扰动,例如尖峰,持续时间很短。扰动可以替代性地或附加地具有显著的幅值和/或强度。
作为非限制性实例,扰动可以与在相对较短的时间段(例如50ms)内与约2cmH
压力相关的扰动可以是可从压力信号中检测到的,例如在使用中由可操作地耦合到呼吸导管的气体压力传感器输出。
此处,技术人员清楚的表达“可操作地耦合”建立链接,例如两个部件之间的功能链接。该表达意味着相关联的两个部件至少在某种程度上相互兼容,并且以某种方式协同工作,或者一个部件以某种方式使另一个部件受益。例如,“可操作地耦合”可以包括将一个部件与另一个部件相关地布置以允许与这些部件中的一个相关联的信息(例如物理现象)到另一个部件的交换。在一些配置中,表达可操作地耦合意味着以允许在两个部件之间交换信息的信息传递的方式布置两个部件。例如,“可操作地耦合”可以包括以直接或间接的方式、例如经由其间的其他部件将第一部件布置到第二部件。附加地或替代性地,表达“可操作地耦合”可以通过布置两个部件以便在它们之间形成物理连通(诸如流体连通或电连通)来实现。
流量相关的扰动可以是可从流量信号中检测到的,例如在使用中由可操作地耦合到呼吸导管的气体流量传感器输出。
参考信号
许多技术可以用于检测由呼吸导管中的水积聚引起的流量和/或压力信号的不规则性。
识别流量和/或压力相关扰动的一种方式是将该或这些第一信号与计算的或预定的参考信号进行比较,该参考信号是指示呼吸导管中的流量或压力的参考信号,或者是指示在呼吸导管中的预期流量或压力的参考信号。
为此,该控制器可以被配置为至少部分地基于该获取的信号的该至少一部分与参考信号之间的比较来针对该获取的至少一个第一信号的相关联的部分识别这些气体流量扰动和/或压力扰动。
在一些配置中,控制器被配置为至少部分地基于比较来识别包括相关联的气体流量扰动和/或压力扰动的至少一个第一信号的该或这些相关联的部分,由此确定一个或多个测量值可以仅针对第一信号的被识别为包括气体流量扰动和/或压力扰动的部分。确定一个或多个测量值的这种目标方法减少了控制器上的计算载荷,因为与气体流量扰动和/或压力扰动不相关联的信号部分可以被丢弃。
在时域中,可以将扰动的形态与充当参考信号的至少一个先前选择的模板进行比较。
可以使用机器学习算法完成代表管中的过量水的模式与正常呼吸模式之间的分离,其中,正负模式的实例用于训练和优化两个种类之间的分离。
该参考信号可以与其中没有积聚的水的相同呼吸导管的预期气体流量和/或压力相关联。
在一些配置中,预期的气体流量和/或压力可以取决于气体流量和/或压力相关联的分布或者例如可操作地连接到呼吸导管的流发生器的呼吸设备的主动操作模式的设置。当处于主动操作模式时,呼吸治疗设备通过呼吸气体递送流动路径主动递送呼吸气体。
在一些配置中,呼吸导管的预期气体流量和/或压力可以至少部分地基于响应于在呼吸治疗设备上选择的主动操作模式而从呼吸治疗设备递送到呼吸导管中的已知的总气体流量和/或压力。
在一些配置中,呼吸导管的预期气体流量和/或压力可以至少部分地基于在一个或多个气体流量和/或压力相关扰动之前和之后从呼吸治疗设备递送到呼吸导管中的已知的总气体流量和/或压力。因此,预期的气体流量和/或压力可以包括使用在一个或多个气体流量和/或压力相关扰动之前和之后从呼吸治疗设备递送的已知的流量和/或压力的插值。
由呼吸治疗设备响应于该呼吸治疗设备的主动操作模式而产生的总的气体流量在下文中可以称为“原始流量”。原始流量可以从测量的流量数据导出,例如借助于可操作地耦合到呼吸治疗设备的流量传感器。
在一些配置中,预期的气体流量和/或压力可以进一步取决于呼吸设备与患者之间的预期泄漏。
因此,在一些配置中,预期气体流量和/或压力可以是从原始流量中减去与预期泄漏相关联的流量的结果。这可以是递送给患者的有效流量。
替代性地,呼吸导管的预期气体流量和/或压力可以与响应于呼吸治疗系统/设备的主动操作模式或气体流量和/或压力关联曲线或设置从呼吸治疗设备递送到呼吸导管中的预估总的气体流量和/或压力有关。
由呼吸治疗系统/设备响应于该呼吸治疗系统/设备的主动操作模式而产生的预估总气体流量在下文中可以称为“预估原始流量”。
在一些配置中,考虑到预期的泄漏,预期气体流量和/或压力可以是从预估原始流量中减去与预期泄漏相关联的流量的结果。
替代性地或附加地,预期气体流量和/或压力可以取决于响应于主动操作模式的预期的患者呼吸模式、和/或呼吸治疗系统/设备的相关联的气体流量和/或压力相关联的曲线或设置。预期的患者呼吸模式可以由控制器至少部分地基于由一个或多个传感器提供的传感器信号来导出。预期的患者呼吸模式可以由过去或历史数据确定,例如平均呼吸模式曲线(由流量和/或压力数据表示)。通过使用来自会话中较早或先前会话中的患者流量/压力数据,该平均呼吸模式曲线可以是患者特定的。替代性地,它可以是一般呼吸曲线。通常,呼吸模式由作为吸气部分的第一部分和作为呼气部分的第二部分组成。
应当注意,即使水积聚在呼吸导管中,也可能无法始终检测到气体流量和/或压力相关扰动。例如,物理地移动呼吸导管位置可能会导致积聚的水在呼吸导管中移动或扩散,从而导致与冒泡声或汩汩声相关扰动不那么突出或停止,或者至少不能被准确地检测到。
图6是示出了当水积聚在呼吸导管中时在呼吸导管中的气体流量和压力信号中发现的扰动的间歇阶段的图示。在图6中,原始流量信号,即由呼吸治疗设备产生的总气体流量结合参考预期气体流量的预估流量信号一起示出,该预期的气体流量是原始流量减去预期的泄漏。此外,还示出了预期的压力信号。出于本说明书通篇使用的术语的目的,原始流量信号、预估流量信号和压力信号各自形成第一信号的相应实例。如从图6可以看出,三个信号的时间部分直到大约时间指数36000示出相当分层的外观而没有快速的频率扰动为止。在这个非扰动时间段中,预估流量和原始流量可以看作是正弦曲线,而图6中的压力信号类似于周期性方波,以便在患者呼吸模式的吸气和/或呼气阶段递送恒定的压力。相应的第一信号中的每一个在该分层的、非扰动的时间区域中形成相应的基础频率。在该非扰动时间区域中,相应的第一信号不受呼吸导管中积聚的水的影响。在图6中,由于原始流量信号的一部分在虚线参考线上方,因此可以观察到患者呼吸模式的吸气阶段。患者呼吸模式的呼气阶段可以被观察为原始流量信号的低于虚线参考线的部分。
然而,如从虚线区域可以看出的,大约从时间指数36000开始并持续直到时间指数38000为止,存在高频扰动的急剧开始。这个时间段形成扰动时间段,从而指示在呼吸导管中存在液态水。在扰动区段中,高频扰动被叠加在非扰动时间段的基础频率上。在图6中,高频扰动是在时间指数36000附近实际将水引入呼吸导管中的结果,并且示出了呼吸导管中的水对相应信号的影响,并且具体是水的冒泡声或汩汩声的影响。相对平坦的原始流量、预估流量和预期的压力信号被示出在大约时间指数38000与42500之间,并且相关联的时间段可能代表患者已移除患者接口的情况,并且因此没有呼吸进入/离开流动路径。高频扰动的另一个开始从大约时间指数42500开始,从而形成又一个扰动时间段。该扰动区段可以代表患者重新连接患者接口以继续他们的呼吸治疗的情况。
图7是示出了在呼吸导管中的气体流量信号中发现的扰动的间歇阶段的实例的图示,以及所述呼吸导管中的水的相关联的检测,其中,使用双水平压力信号。这种双水平系统在吸气过程中递送第一压力的呼吸气体,并且在呼气过程中递送第二、较低压力的气体。在使用双水平压力信号时示出当水积聚在呼吸导管中时产生的原始流量、预估流量和压力信号。图7中所示的信号可以看作是图6中信号的放大图。在用户的呼吸的吸气阶段过程中,由呼吸导管中的水引起的扰动可能比呼气阶段更明显。
为此,在一些配置中,控制器可以被配置为通过针对获取的至少一个第一信号的部分确定与气体流量扰动和/或压力扰动相关联的至少一个第一参数的测量值来确定在呼吸导管中存在液态水,其中,所述部分中的至少一个与呼吸的吸气阶段相关联。
在一些配置中,控制器可以仅使用与吸气阶段相关联的信号部分来确定在呼吸导管中存在液态水,从而减少控制器的计算需求。
图8是示出了在呼吸导管中的气体流量信号中发现的扰动的间歇阶段的另一实例的图示,以及所述呼吸导管中的水的相关联的检测。图8中所示的数据代表了呼吸治疗的用户的呼吸模式。由一个或多个传感器提供的原始流量、预估流量和压力信号被示出用于向用户提供双水平呼吸治疗的呼吸治疗装置。在图8中,由于原始流量信号的一部分在虚线参考线上方,因此可以观察到患者呼吸模式的吸气阶段。患者呼吸模式的呼气阶段可以被观察为原始流量信号的低于虚线参考线的部分。
一个或多个第一参数
该或这些第一参数可以选自一组气体流量和/或压力相关参数。这种气体流量和/或压力相关参数可以由流量信号、压力信号或任何其他信号或所提供的计算装置来提供或从其推导出。
例如,该或这些第一参数可以选自至少包括以下各项的组:
a)气体流量和/或压力相关扰动的一个或多个相关联频率;
b)时域中的流量和/或压力相关扰动的幅值;
c)频域中的流量和/或压力相关扰动的强度;
d)相关联的流量扰动和/或压力扰动的持续时间;
e)流量和/或压力相关扰动的一组峰值的周期性;
f)流量和/或压力相关扰动的不同组峰值之间的周期;以及
g)患者呼吸周期中的急剧变化的位置。
第一参数的共同点是它们与呼吸导管的气体流量和/或气体压力直接相关联和/或指示它们。
根据第一参数的类型,可以在例如时域、频域或另一个域的不同域中确定相关联的测量值。
至少一个第一参数的测量值可以从源自该或这些第一信号的呼吸导管的测量的气体流量和/或压力的收集信息导出。因此,通过获取该或这些第一信号,控制器可以存储与呼吸导管的气体流量和/或压力的历史和当前信息相关的收集数据的数据集。
图9是在患者呼吸循环的吸气和呼气阶段过程中的第一信号的图示,其中,已经选择了与扰动幅值和相关联峰值之间的周期相关的第一参数。该或这些第一参数可以由控制器选择。
控制器可以被配置为对该或这些第一信号或收集的数据集(或其时间段)中的至少一个进行频率分析,以允许确定与频率或周期性相关联的该或这些第一参数的频率相关的第一参数测量值。
频率分析可以例如至少部分地基于傅立叶变换(FT),诸如至少一个第一信号的快速傅立叶变换(FFT)。由于空间或时间信息,例如时间,在进行FT或FTT时丢失,控制器可以在该或者这些第一信号的定义时间段上利用FT或FFT。以这种方式可以获得每个定义的时间段的频谱。控制器可以替代性地或附加地比较不同时间段之间的频谱以便确定相关联的第一参数测量值中的至少一些。因此,可以使用FFT以时间扩展中的零位控制为代价在频率方面获得非常准确的精度。然而,通过对该或这些第一信号的多个明确定义的时间段进行FFT,其中,每个时间段具有相对较短的持续时间,可以在所述时间段过程中提取关于呼吸导管的气体流量和/或压力相关不规则性的信息。例如,应用该或这些第一信号或收集的数据集(或其时间段)中的至少一个的频率分析可以允许识别呼吸导管中的水的积聚或存在,例如通过检测扰动的时间开始。
替代性地或附加地,可以对该或这些第一信号进行小波分析。通常,小波分析提供关于相关联频谱的信息不如FFT准确,然而在时间扩展方面具有增强的控制。因此,使用小波分析,可以识别关于在该或这些第一信号的不同时间位置处的呼吸导管的气体流量和/或压力相关的不规则性的频率相关联信息。
附加地或替代性地,频率分析可以至少部分地基于与至少一个第一信号相关联的至少一个频谱图。频谱图可以具有与频率相关的一个轴和与时间相关的另一个轴。可以识别每个相关联时间段的频率。图10b、图11b和图12c示出了具有图10a、图11a和图12a中表示的相关联的第一信号的这种频谱图的三个实例。
图10a和图10b示出了从代表正弦流动模式的第一信号导出的流量数据,该正弦流动模式类似于可以使用呼吸流动系统由患者观察到的流动模式。第一信号的流量数据包括具有由呼吸导管中的水起泡引起的扰动的时间部分,以及呼吸导管(中心部分)中没有水(或没有水存在的指示)的时间部分。
图10a的第一信号的相应频谱图如图10b所示。图10b因此提供了第一信号的数据信息的频率的频谱的可视化表示,其可以与压力波,例如声音,或其他信息有关。图10b的频谱图是通过对第一信号的流量数据进行傅立叶变换而建立的。在这个特定示例性附图中,频谱图在Y轴上示出了相关联的频率,并且沿着X轴示出了时间。然后可以确定从傅立叶变换导出的组成频率的幅值(强度),并由频谱图中的颜色或阴影表示。频谱图包括频谱上的从代表第一强度(0)的第一阴影到代表第二强度的第二阴影的一系列阴影。在图10b的频谱图中,第一阴影比第二阴影更暗。更暗的阴影表示所指频率的更低强度,而更亮的阴影表示所指频率的更高强度。
来自呼吸治疗的患者的普通呼吸频率往往相对较低。正常静息速率呼吸和/或睡眠期间的呼吸速率可以在大约每分钟10到15次呼吸的范围内,从而导致呼吸频率为0.16至0.25Hz。在1至25Hz的频率下的流量信号中的频率的突出是在冒泡的呼吸导管中积聚了水的指示。这在图10b的频谱图中由当观察到冒泡时在该频率范围内的较高幅值(第二强度区域)以及当不存在水和/或冒泡时在该频率范围内的较低幅值(第一强度区域)示出。
图11a示出了与呼吸导管中的气流相关联的第一信号随时间变化的图示的另一实例。更具体地,图11a示出了与图10a至图10b相比在更小的时间窗口上的流量数据的时间序列。相关联的频谱图如图11b所示。与图10b类似,在图11b中,呼吸导管中积聚的水由当观察到冒泡时在相关联的频率范围内的较高幅值(第二强度区域)以及当不存在水和/或冒泡时在该频率范围内的较低幅值(第一强度区域)表示。
图12a示出了与呼吸导管中的气流相关联的第一信号随时间变化的图示的另一实例。更具体地,图12a示出了与图10a至图10b相比在更小的时间窗口上的流量数据的时间序列。相应的频谱图在图12b中示出。与图10b和图11b相似,在图12b中,呼吸导管中积聚的水由当观察到冒泡时在相关联的频率范围内的较高幅值(第二强度区域)以及当不存在水和/或冒泡时在该频率范围内的较低幅值(第一强度区域)表示。
如从图10b、图11b和图12b的每个频谱图中看出,与呼吸导管中积聚的水相关扰动的开始可以被视觉检测到。
在一些配置中,可以将常规图像分析边缘检测模型应用于频谱图以识别扰动的开始,例如时间开始。
一个或多个第二参数
在一些配置中,在水积聚确定过程期间,控制器还可以考虑除了那些直接影响或指示气体流量和/或压力的参数之外的参数。通过分析与流量和/或压力直接相关联的参数以及间接相关的参数两者,可以增加正确的水积聚检测的置信度。
为此,控制器1011可以被配置为获取1011b与呼吸导管的气体流量和/或压力间接相关的信息。此外,控制器1011可以被配置为确定1012b与获取的信息相关联的至少一个第二参数的测量值。
控制器1011可以处理该或这些第二参数的该或这些测量值以达成在呼吸导管中存在液态水的肯定决策或确定。
因此,控制器1011可以被配置为至少部分地基于满足第一阈值的至少一个第一参数的该或这些测量值以及满足第二阈值的至少一个第二参数的该或这些测量值来确定1013在呼吸导管中存在液态水。
该或这些第二参数可以从一组间接气体流量和/或压力相关参数中选择。
例如,该或这些第二参数可以选自至少包括以下各项的组:
a)该气流的温度;
b)环境温度;
c)该气流的湿度;
d)环境湿度;
e)装置气体湿度设置;
f)装置气体温度设置;
g)装置地理位置;
h)环境天气预报;和/或
i)装置高度。
实例1
在气流温度相对较低而气体湿度较高的情况下,冷凝的可能性较高,并且增加了呼吸导管中的水的积聚的风险。在这种情况下,气体流量和/或压力相关的扰动很可能与呼吸导管中积聚的水有关。由于温度低且湿度高,因此在呼吸导管中积聚水的最终风险因素很高,这表明气体温度非常接近其露点。将气体温度降低到甚至进一步超过露点将意味着气体中的一些水分必须冷凝,从而导致呼吸导管中的水积聚。控制器可以使用与第二参数相关联的信息作为做出呼吸导管中存在液态水的肯定决策或确定的一部分。在这种情况下,该信息可以增加确定水积聚在呼吸导管中的可能性。此外,在这种情况下,可以使用该或这些第二参数的相关联信息来增加正确的水积聚检测的置信度。
实例2
在气流温度相对较高而气体湿度较低的情况下,冷凝的可能性较低,并且降低了呼吸导管中的水的积聚的风险。在这种情况下,气体流量和/或压力相关的扰动不太可能与呼吸导管中积聚的水有关。由于温度高且湿度低,因此在呼吸导管中积聚水的最终风险因素很低,这表明气体温度相对远离其露点。因此,将气体温度降低至露点并不意味着气体冷凝的显著风险,因为露点相对远离实际气体温度。在这种情况下,与该或这些第二参数相关联的信息可以降低确定水积聚在呼吸导管中的可能性。
可以在第二信号中提供与气体流量和/或压力间接相关的信息。在一些配置中,在使用中,第二信号可以由传感器输出,例如可操作地耦合到呼吸导管和/或呼吸治疗系统的一个或多个温度传感器、一个或多个湿度传感器、一个或多个气压计、一个或多个全球定位系统(GPS)传感器或模块。至少一个传感器可以与呼吸治疗系统集成。例如,至少一个传感器可以与流发生器、加湿器、呼吸气体递送导管和/或患者接口集成。为此,控制器可以包括用于从传感器接收第二信号的输入端。
尽管传感器可以用于向控制器1011提供与第一和/或第二参数相关联的信息,但替代性地或附加地,与第一或第二参数中的一些相关联的至少一些信息可以例如经由外部或内部输出端直接从呼吸治疗设备获取。
因此,控制器1011可以包括一个或多个输入端,以用于从呼吸治疗系统/设备100的一个或多个传感器或终端接收信号。
水积聚的确定
为了肯定地确定呼吸导管中存在水,控制器1011可以被配置为基于该或这些第一参数来计算得分。例如,得分可以是第一参数的函数,使得:
S
其中,S
替代性地,控制器1011可以被配置为基于该或这些第一参数和该或这些第二参数来计算得分。例如,得分可以是该或这些第一参数和该或这些第二参数的函数,使得:
S
其中,S
得分可以是单个参数得分的聚合。例如,得分可以是一个或多个第一参数得分和一个或多个第二参数得分的函数,使得:
S
其中,S
因此,在一些配置中,为了使控制器1011确定在呼吸导管中存在液态水,可能需要利用第一信号和参考信号的数据的许多计算。换句话讲,控制器1011可以利用第一信号和参考信号的数据来执行多个计算以确定在呼吸导管中存在液态水。
每个参数都可以被分配定义的权重。控制器1011可以被配置为基于定义的权重和每个相关联参数的测量值来计算单独的参数得分。例如,单个参数得分可以是参数及其定义权重的函数,使得:
S
其中,S
替代性地,控制器1011可以被配置为通过聚合各个单独的参数得分来计算总得分。例如,聚合可以是单个参数得分的总和,使得:
其中,S是总得分,并且S
替代性地,聚合可以是各个参数得分的积级数,使得:
其中,S是总得分,并且S
可以使用替代性聚合方法和/或运算符来代替所描述的求和运算符和乘积运算符。
替代性地,控制器1011可以被配置为通过基于定义的单个参数权重来聚合相应的导出的参数测量值来计算总得分。
在一些配置中,参见图1,当总分满足第一阈值时,可以做出在呼吸导管中存在液态水的肯定确定。在这种配置中,第一阈值可以是预定值。
在替代性配置中,第一阈值可以是考虑该或这些获取的第一信号、该或这些第一参数及其该或这些确定的测量值的函数。因此,在这些情况下,第一阈值函数在同一第一信号的不同时间部分之间可能不同。
当第一阈值是函数时,在一些配置中,该函数的输出可以是一个值(与相关联的总得分进行比较),或者该函数可以提供“肯定”或“否定”水检测决策。
应当理解,单个参数权重可以根据单个参数的测量值而改变。例如,一个参数的权重可以基于所述参数的测量值来调整。然而,其他参数的该或这些测量值也可以用于调整所述参数的相应权重。
在一些情况下,可能希望在第一信号的时间部分以外的地方收集证据,例如以避免呼吸导管中的水的错误检测。在这种情况下,可以单独分析时间部分并且可以组合结果以做出在呼吸导管中存在液态水的最终决策或确定。替代性地,可以一起分析时间部分以推断结果。
应当理解,不同的参数集,例如第一参数的选择和/或第二参数的选择可以用于每个时间部分,因为一些第一参数可能不是从第一信号的每个时间部分确定的并且某些第二参数可能在与第一信号的时间部分相关联的时间内不可用。
为此,因为可以在不同部分,即第一信号的不同时间部分或时间位置处发现气体流量扰动和/或压力扰动,所以控制器可以被配置为计算每个部分的总得分。每个时间部分可以可选地包括多个时间段。每个时间段可以跨越从开头或开始t
应当理解,由于该或这些第一参数及其相关联的确定测量值在不同时间位置之间可能不同。因此,第一信号的第一时间部分的任何第一参数的相关联权重可以不同于同一第一信号的第二时间部分的任何第一参数。
为了达到肯定地确定在呼吸导管中存在液态水,控制器1011可以有利地分析每个第一信号的多于一个时间部分。因此,在一些配置中,与第一信号的第一时间部分相关联的每个参数的单独参数得分或第一信号的每个时间部分的总得分可以在做出肯定地确定在呼吸导管中存在液态水之前由控制器1011来确定。
为此,控制器1011可以被进一步配置为针对所接收到的至少一个第一信号的至少一个另外的时间部分确定与流动扰动和/或压力扰动相关联的至少一个另外的第一参数的测量值,并且进一步至少部分地基于满足第一阈值的至少一个另外的第一参数的该或这些测量值来确定在呼吸导管中存在液态水。
在一些配置中,控制器1011被配置为当与第一信号的一个时间部分相关联的总得分或多个单独参数得分满足第一阈值时确定1013在呼吸导管中存在液态水。
在一些配置中,控制器1011被配置为当与第一信号的一个时间部分相关联的总得分或多个单独参数得分满足第一阈值而至少一个第二参数满足第二阈值时确定1013在呼吸导管中存在液态水。
在其他配置中,控制器1011可以被配置为当与第一信号的一个时间部分相关联的总得分或多个单独参数得分满足第一阈值并且与第一信号的另一个时间部分相关联的总得分或多个单独的参数得分满足另外的第一阈值时确定1013在呼吸导管中存在液态水。
在其他配置中,控制器1011可以被配置为当与第一信号的一个时间部分相关联的总得分或多个单独参数得分满足第一阈值并且与第一信号的另一个时间部分相关联的总得分或多个单独的参数得分满足另外的第一阈值而至少一个第二参数满足第二阈值时确定1013在呼吸导管中存在液态水。
滤波
在一些配置中,控制器1011被配置为在做出肯定决策或确定在呼吸导管中存在液态水之前使用滤波器对该或这些第一信号中的至少一个进行滤波。
如前所述,可以将与打鼾和/或患者的一般呼吸模式相关的气体流量扰动和/或压力扰动与和呼吸导管中积聚的水相关的那些气体流量扰动和/或压力扰动区分开。在一些配置中,可以使用低通滤波器来丢弃与打鼾相关联的较高扰动频率。
在一些配置中,将高通滤波器应用于第一信号以将可能在与呼吸导管中的水积聚相关联的流量和/或压力模式中观察到的短持续时间高幅值峰值或尖峰与患者的一般呼吸模式隔离。
在一些配置中,将带通滤波器应用于第一信号以丢弃与打鼾相关联的较高频率以及与患者的一般呼吸模式相关联的较低频率。更一般地,带通滤波器可以被调谐以对低于较低频率滤波器阈值的频率以及高于较高频率滤波器阈值的频率进行滤波。这允许在较低频率滤波器阈值与较高频率滤波器阈值之间的信号的隔离。例如,在至少一种配置中,带通滤波器可以适当地调谐到大约1至25Hz的范围。在至少一种配置中,一个或多个带通滤波器可以隔离在1到25、2到25、3到25、4到25、5到25、10到25、15到25、20到25、5到10、10到15、15到20、1到30、5到30、10到30和/或10到35Hz的范围内的频率以便进行分析。这可以将与呼吸导管中的水积聚相关联的流量和/或压力模式与和打鼾或患者的一般呼吸模式相关联的频率隔离。换句话讲,我们可以选择与呼吸导管中的冒泡声或汩汩声相关联的一个或多个频带,这些频带不同于与打鼾相关联的一个或多个频带。
控制器1011可以被进一步配置为在确定该或这些第一参数中的至少一个之前使用滤波器对该或这些第一信号中的至少一个进行滤波。
图9是示出与呼吸导管中的流量有关的第一信号对第一信号的经滤波版本的图示,该第一信号示出了所述原始流量信号的扰动强度。经滤波的信号被滤波,使得已使用截止频率为5Hz和20Hz的带通滤波器提取高频分量。经滤波的信号相当于5至20Hz的频率范围内频率的叠加幅值。
图14是示出图13的原始流量信号和经滤波版本以及相关联的时间部分的图示,其中,发现积聚在呼吸导管中的水的检测。在一些配置中,当经滤波的信号在给定时间窗口中大于某个阈值时,可以检测到由于呼吸导管中的水积聚引起的冒泡声。图14示出了其中这种阈值覆盖在图13的流量和滤波信号上的实例,使得仅示出流量信号和经滤波信号的满足阈值的部分。如图14所示,由此断定在这些相关联的时间部分中检测到水。经滤波的信号的峰值的幅值可以在一些配置中用作第一参数。在一些配置中,在时间段上的经滤波信号的峰值的平均幅值可以用作第一参数。
机器学习
肯定地确定在呼吸导管中存在液态水的过程可能需要在时域、频域或任何其他域中分析该或这些第一信号以获取指示由呼吸导管中的过量的水引起的流量/压力的急剧变化的模式。
可以使用机器学习算法来执行确定相应参数的测量值并且肯定地确定在呼吸导管中存在液态水的过程。
该或这些第一信号和与该或这些第二参数相关的信息的这种潜在分析可以以描述形式完成,即通过选择算法和启发法来检测特定模式,或者使用通用机器学习技术(例如线性回归、神经网络、深度学习神经网络、贝叶斯网络等)以从该或这些第一信号或该或这些第一信号的经滤波版本中提取与呼吸导管中积聚的水的检测相关的特征。在后一种情况下,与在呼吸导管模式中积聚水和呼吸导管中没有水的模式相关联的信号被用于提取特征以执行分类。
通过输入表示在没有水积聚的呼吸导管中的“正常”气体流量和/或压力模式的多个第一信号,以及表示在同一呼吸导管中的“水积聚”的第一信号,可选地结合与气体流量和/或压力间接相关的信息,相关联的分类器被训练以便能够将新的观察结果(例如第一信号或其表示,可选地包括与气体流量和/或压力间接相关的信息)分类到“正常”或“水积聚”类别。在这种新的观察结果落入水积聚类别的情况下,可以肯定地确定在呼吸导管中存在液态水。
因此,作为训练机器学习算法的结果,形成了许多经训练的分类器,这些分类器可以用于将任何新的观察分类为属于正常或水积聚类别。
如前所述,可以将多个变量权重分配给每个参数,以便计算整体或单独的得分。在一些配置中,可以训练机器学习算法以为每个参数应用正确的权重,从而考虑手头的所有其他信息,例如相关于已经考虑的观察结果的当前观察结果的相关联的权重、参数类型和参数测量值。
在一些配置中,第一阈值和/或第二阈值可以被定义为使用机器学习算法训练的训练函数,并且因此可以形成机器学习算法的整体部分。
根据机器学习算法的配置,可以使用各种输入或特征来进行训练并且对新的观察结果进行分类。
不同的输入/特征可以与以下各项有关:
·该或这些第一信号;
·该或这些第一信号的表示,例如频谱图、FFT分布、小波谱等;
·一个或多个第一参数的类型;
·相应类型的一个或多个第一参数的幅值;
·与气体流量和/或压力间接的信息;
·一个或多个第二参数的类型;和/或
·相应类型的一个或多个第二参数的幅值。
频域实例
在一个实施例中,控制器1011被配置为通过以下方式进行确定1012a的至少一个第一参数的测量值的步骤:
a)对与呼吸导管中的气体流量和/或压力相关联的至少一个第一信号进行傅立叶变换,以及
b)确定至少一个第一信号的傅立叶变换数据的至少一个高能量频率幅值/强度,并且可选地将至少一个高能量频率幅值/强度与第一阈值进行比较。
控制器1011然后被配置为如果至少一个高能频率幅值/强度满足(例如高于)第一阈值,则确定1013在呼吸导管中存在液态水。
在该实施例中,确定1012a的步骤可以在患者呼吸模式的吸气阶段过程中进行。关于这种吸气阶段的开始的信息可以由控制器1011从例如流发生器或者从可操作地连接到呼吸导管的一个或多个流量/压力传感器接收。
在替代性实施例中,确定1012a至少一个第一参数的测量值的步骤包括:
a)对与呼吸导管中的气体流量和/或压力相关联的至少一个第一信号进行傅立叶变换,从而产生傅立叶变换的数据;
b)计算代表傅立叶变换数据的频谱特征的幅值的矢量;以及
c)将计算的矢量与代表在呼吸导管中没有水积聚的情况下的气体流量和/或压力(例如正常呼吸流量/压力)的模板进行比较。
控制器1011然后被配置为如果计算的矢量与正常呼吸模板显著不同,则确定1013在呼吸导管中存在液态水。
在替代性实施例中,确定1012a至少一个第一参数的测量值的步骤包括:
a)对与呼吸导管中的气体流量和/或压力相关联的至少一个第一信号进行傅立叶变换,从而产生傅立叶变换的数据;
b)计算代表傅立叶变换数据的频谱特征的幅值的矢量;以及
c)将计算的矢量与代表在呼吸导管中没有水积聚的情况下的气体流量和/或压力的模板进行比较,并且将其与代表在呼吸导管中有水积聚的情况下的气体流量和/或压力的模板进行比较。
控制器1011然后被配置为如果计算的矢量与和没有水积聚相关联的模板相比更类似于与水积聚相关联的模板,则确定1013在呼吸导管中存在液态水。
在替代性实施例中,确定1012a至少一个第一参数的测量值的步骤包括:
a)对与呼吸导管中的气体流量和/或压力相关联的至少一个第一信号进行傅立叶变换,从而产生傅立叶变换的数据;
b)计算代表傅立叶变换数据的频谱特征的幅值的矢量;以及
c)将计算的矢量与代表在呼吸导管中有水积聚的情况下的气体流量和/或压力的模板进行比较。
控制器1011然后被配置为如果计算的矢量基本类似于与水积聚相关联的模板,则确定1013在呼吸导管中存在液态水。
在替代性实施例中,确定1012a至少一个第一参数的测量值的步骤包括:
a)使用至少一个第一信号作为输入获取表示使用机器学习算法得出的呼吸导管中积聚水的方程或函数;
b)对与呼吸导管中的气体流量和/或压力相关联的至少一个第一信号进行傅立叶变换,从而产生傅立叶变换的数据;以及
c)将傅立叶变换的数据输入到获取的方程或函数中。
如果方程或函数的输出满足第一阈值,则控制器1011然后被配置为确定1013在呼吸导管中存在液态水。
时域实例
在替代性实施例中,确定1012a至少一个第一参数的测量值的步骤包括:
a)对至少一个第一信号应用高通滤波器以去除呼吸流迹线和DC(偏移)电平,从而产生至少一个经滤波信号;
b)确定在至少一个经滤波信号的第一时间部分处的第一高能量频率幅值;
c)确定在至少一个经滤波信号的第二时间部分处的第二高能量频率幅值。
DC偏移是流量信号中相对于流量基线的偏移。流量基线可以是零流量基线。流量信号中的DC电平通常与系统中的泄漏相关联,或者一些配置中与指示治疗(基于流量的治疗)的提供的恒定流量水平相关联。压力信号中的DC电平通常与压力相关联,并且为治疗(基于压力的治疗)提供指示。例如,如果在CPAP治疗中递送了一些最小压力(例如4cmH
如果第一和第二高能量频率幅值在阈值时间段内发生,则控制器1011然后被配置为确定1013在呼吸导管中存在液态水。在这种情况下,第一阈值可以定义阈值时间段,并且前提是第一和第二高能量频率幅值满足第一阈值,即它们的相互相对时间距离在所述阈值时间段内,则可以做出在呼吸导管中存在液态水的决策。
在替代性实施例中,确定1012a至少一个第一参数的测量值的步骤包括:
a)对至少一个第一信号应用滤波器,从而产生至少一个经滤波信号;以及
b)确定至少一个经滤波信号的给定时间范围(例如时间段)内的峰值的数量。
如果给定时间范围内的峰值之间的平均时间段在第一阈值内,则控制器1011然后被配置为确定1013在呼吸导管中存在液态水。在此,第一阈值可以与设定值有关。
在替代性实施例中,确定1012a至少一个第一参数的测量值的步骤包括:
a)对至少一个第一信号应用滤波器,从而产生至少一个经滤波信号;以及
b)确定至少一个经滤波信号的给定时间范围(例如时间段)内的峰值的数量。
如果峰值的数量满足(例如超过)第一阈值,则控制器1011然后被配置为确定1013在呼吸导管中存在液态水。在此,第一阈值可以与设定值有关。
在替代性实施例中,确定1012a至少一个第一参数的测量值的步骤包括:
a)计算至少一个第一信号的导数,从而得到导数数据;以及
b)确定在给定时间范围(例如时间段)内导数数据的过零点的数量;
如果过零点的数量满足(例如超过)第一阈值,则控制器1011然后被配置为确定1013在呼吸导管中存在液态水。在此,第一阈值可以与设定值有关。
替代性地,如果给定时间范围内的过零点之间的平均时间段在第一阈值内,则控制器1011可以被配置为确定1013在呼吸导管中存在液态水。在此,第一阈值可以与设定值有关。
替代性地,如果在由第一阈值限定的预定时间段内发生过零点中的至少两个,则控制器1011可以被配置为确定1013在呼吸导管中存在液态水。
如上所述,控制器1011可以被配置为分析给定时间周期中的数据,并且如果该时间段内满足某些条件,则得出指示管中的水的输出。因此,导出的测量值可以针对第一信号的第一部分(例如一个吸气阶段或多个呼吸阶段)导出。该测量值可以与在呼吸导管中存在液态水的概率得分有关。例如,如果呼吸导管的管中可能有液态水,则该数值可能接近1,而如果不太可能有液态水,则该数值可能接近0。以这种方式分析一个或几个信号部分可以称为短期模式分析。
此处,模式分析应理解为流量/压力信号模式的分析,例如时域中的形状、任何其他域中的频谱模式或任何其他特征。
在流量/压力信号的短期分析部分期间,即基于时间的短持续时间段,例如可以由控制器1011分析一秒流量段。在此,控制器1011确定每个部分的至少一个参数的测量值。部分可以重叠,例如50%重叠。对于每个信号部分,可以由控制器1011确定指示在呼吸导管中存在液态水的得分或概率因子。
可以以不同方式(例如取平均)组合或聚合不同部分的概率得分以提供长期模式分析,这将在下文进一步阐述的。
此外,还可以重复此过程,从而在信号的后期阶段(例如第二吸气、第一吸气的后期或第一/多个吸气的重叠部分)产生多个概率因子(第二、第三等)。这可以称为长期模式分析,它是对在较长时间段内确定的这些概率因子的分析(例如,对概率因子求和,从而找到给定时间段内的因子的平均值等),这可以用于确定在呼吸导管中存在液态水。作为非限制性实例,如果在x的时间部分上的平均概率因子>0.7(在0与1之间的规模上),则很可能在与该时间部分相关联的该时间段内在呼吸导管中存在液态水。
因此,在替代性实施例中,确定1012a至少一个第一参数的测量值的步骤包括:
a)针对所获取的不同于参考信号的至少一个第一信号的第一部分,确定与气体流量扰动和/或压力扰动相关联的一个第一参数的测量值,其中,第一参数的测量值与指示在呼吸导管中存在液态水的第一概率得分有关;
b)针对所获取的不同于参考信号的至少一个第一信号的第二部分,确定与气体流量扰动和/或压力扰动相关联的另一个第一参数的测量值,其中,另一个第一参数的测量值与指示在呼吸导管中存在液态水的第二概率得分有关,以及可选地
c)迭代地确定至少一个第一信号的另一部分的一个或多个另外的概率得分。
控制器1011然后被配置为:如果满足概率得分阈值的确定的概率得分的数量满足(例如超过)第一阈值,则确定1013在呼吸导管中存在液态水。在此,概率阈值和第一阈值可以表示一个值。概率阈值可以充当滤波器,例如滤除低于某个水平的概率得分,使得为了满足第一阈值,仅考虑高于概率阈值的概率得分。
替代性地,如果所确定的概率得分的聚合测量值满足(例如超过)第一阈值,则控制器1011可以被配置为确定1013在呼吸导管中存在液态水。在简单的情况下,聚合测量值可以是确定的概率得分的总和。替代性地,聚合测量值可以是应用于概率得分的统计聚合函数的结果。
输出控制信号
控制器1011可以被进一步配置为输出1014随后由控制器1011或呼吸治疗系统100的该或另一控制器使用的至少一个控制信号,以控制系统100的一个或多个方面或部件。例如,控制信号可以用于控制流发生器、加湿器加热器或呼吸导管加热器中的任何一个或多个或全部。在一个实例中,如果在呼吸导管中检测到液态水,则系统100可以使用控制信号来增加供应给呼吸导管加热器的电流,以根据控制信号改变呼吸导管加热器的热输出。
控制信号可以输出到系统100或由系统使用以控制可操作地连接到呼吸导管的至少一个装置。
在一些配置中,控制器1011被配置为响应于对在呼吸导管中存在液态水的肯定确定而输出至少一个控制信号。
替代性地或附加地,控制器1011可以被配置为在没有在呼吸导管中存在液态水的肯定确定的时段期间输出控制信号。
控制信号可以包括用于将至少一个装置的操作设置或模式从其当前设置或模式改变为水积聚决策相关模式的指令。
该装置可以是与呼吸导管相关联地设置的加热丝,以用于加热存在于呼吸导管中或即将存在于呼吸导管中的气体。
替代性地或附加地,该装置可以是包含加热元件的加热板,该加热元件用于加热向呼吸导管提供加湿气体的加湿室。
在一些配置中,一个控制信号被配置为控制加热丝的操作,以便响应于在呼吸导管中存在液态水的肯定确定来增加呼吸导管中气体的气体温度。
附加地或替代性地,一个控制信号可以被配置为控制加热板的操作,以便响应于在呼吸导管中存在液态水的肯定确定来降低呼吸导管中气体的湿度。
在一些配置中,一个控制信号被配置为控制加热丝的操作,以便在没有做出在呼吸导管中存在液态水的肯定确定的时间段内维持呼吸导管中气体的当前气体温度。
附加地或替代性地,一个控制信号可以被配置为控制加热板的操作,以便在没有做出在呼吸导管中存在液态水的肯定确定的时间段内维持呼吸导管中气体的湿度。
在一些配置中,控制器1011被配置为在输出原始控制信号之后的预定时间向装置输出另外的控制信号。另外的控制信号可以包括从水积聚决策相关模式恢复到装置的原始操作设置或模式的指令。
可以连续地或周期性地监测控制器1011的输入,以便允许做出呼吸导管中的水积聚的肯定决策或确定。控制器1011可以被进一步配置为持续地或周期性地更新输出到至少一个装置的该或这些相关联的控制信号。
图15是示出与气体流量相关联的第一信号以及用于指示在相关联的呼吸导管中检测到水的相关联的识别触发和循环标志的图示。第一信号是指双水平流量/压力信号。通常,双水平算法基于流量信号触发呼气气道正压通气(EPAP)和吸气气道正压通气(IPAP)。如果流量/压力信号存在失真,例如由于管中的水冒泡,这些失真可以满足用于触发双水平算法的条件,(例如流量信号的梯度、流量信号的过零点等),并且导致错误的触发,如图15所示。由于流量信号的失真,呼吸导管中的水积聚可能导致触发和循环在单次呼吸中发生多次。双水平算法被设计成用于降低用户在呼气时递送给用户的压力。流量/压力信号的快速下降可能会被算法误认为是患者已停止吸气并开始呼气的指示,因此该算法可能会误触发。如图15所示,流量信号扰动可能会影响双水平系统的触发标志。快速变化的信号可能会导致错误的触发标志或循环标志。触发标志通常基于与基线相比的流量信号的幅值。例如,如果幅值超过触发标志,则确定患者已经开始吸气,并且这可以触发呼吸治疗系统施加IPAP压力。循环标志是指吸气结束的指示点,并且通常出现在流量已经达到峰值并已从峰值下降到一定程度的地方。循环标志可能会触发EPAP压力。
在一些配置中,由控制器输出的控制信号可以被配置为向液态水的存在的双水平算法提供输入,以便响应于该或这些第一信号的气体和/或压力扰动最小化双水平算法的误触发标志或循环标志。换句话讲,当由控制器确定在呼吸导管中存在液态水时,控制信号可以用于例如在流发生器中抑制IPAP或EPAP压力的触发。
因此,当发现由在呼吸导管中存在液态水引起的扰动时,相关联的输出控制信号可以用于指示流发生器忽略触发标志和/或循环标志。可选地,控制信号可以用于将流发生器的操作模式改变为默认的(非患者触发的)IPAP/EPAP模式,而不管患者的呼吸模式如何,直到扰动停止存在为止,此时控制信号可以再次重新激活患者呼吸模式触发的双水平模式。
在一些配置中,控制信号被配置为更新、例如改变或控制装置的操作设置,而不是改变装置的模式。以这种方式,可以说控制器1011向可操作地连接到呼吸导管的该或这些装置的操作设置提供反馈回路。该或这些装置可以形成系统100的能够控制呼吸导管中气体的湿度的湿度控制系统的一部分。
操作设置可以与降低/维持/增加湿度、增加/维持/降低温度或增加/维持/降低到可操作地连接到装置的加热装置(例如加热丝或加热板)的功率相关联。
在一些配置中,控制信号可以被配置为向装置可执行的算法提供反馈,例如双水平触发算法、呼吸检测算法或流量限制检测算法。
呼吸检测算法可以用于确定患者的当前呼吸速率。在呼吸导管中存在液态水的情况下,呼吸检测算法可能无法正常工作,因此它可以被控制信号禁用以便避免执行依赖于呼吸检测算法的功能。错误或不准确的呼吸检测也可能影响其他基于呼吸的算法(例如,流量限制检测),这些算法依赖于对呼吸的吸气部分的模式的分析。例如,如果液态水在呼吸导管中,则控制器1011可以在分析信号以确定双水平触发点之前滤除冒泡频率。
替代性地,如果液态水存在于呼吸导管中,则系统100可以仅递送CPAP,因为患者可能睡着了。换句话讲,响应于液态水存在于呼吸导管中的确定,系统100可以从第一操作模式改变成第二操作模式。
在一些配置中,提供了一种计算机实现的方法,该方法用于检测用于患者的呼吸治疗的呼吸气体。该方法包括:
由控制器1011获取1011a与该呼吸导管中的气体流量和/或压力相关联或指示其的至少一个第一信号,
由控制器1011针对该获取的至少一个第一信号的至少一部分来确定1012a与气体流量扰动和/或压力扰动相关联的至少一个第一参数的测量值,以及
由控制器1011至少部分地基于满足第一阈值的该至少一个第一参数的该或这些测量值来确定1013在呼吸导管中存在液态水。
在一些配置中,计算机实现的方法进一步包括在控制器1011中执行由本文披露的系统100的控制器执行的任何一个功能步骤。
在计算机实现的方法中定义的控制器1011可以是上述系统100的控制器。替代性地,在计算机实现的方法中定义的控制器1011可以不同于上述系统100的控制器。计算机实现的方法和系统100分别改进了计算机技术,使得当仅存在相对非常少量的液态水时能够检测出在呼吸治疗系统的呼吸导管中存在液态水。人类将无法检测到存在如此少量液态水,因为人类听觉无法记录如此少量水的相关联的频率扰动。因此,计算机实现的方法带来了人类感官无法实现的实质性技术改进,因为可以在较早的阶段确定在呼吸导管中存在水,在较早的阶段可以在一些情况下自动采取纠正措施或系统操作调整,以减少呼吸导管中的液态水。当检测到管中的水冒泡时,人类将无法实时调整双水平系统的触发和循环标志。
一旦系统与患者断开连接,就可以执行上述对呼吸导管中的液体冷凝物进行干燥或至少部分干燥的对策,从而使患者不会暴露于不利条件,例如相对高温的气体或相对高焓的气体。替代性地,这些纠正措施可以在使用中进行,即当附接到患者身上时。控制器被配置为控制系统的一个或多个部件以便保持在安全操作条件内,即气体的焓和/或温度和/或气流的流量和/或压力低于预定限制。控制器可以被设置有对温度、流量、压力和/或焓的预定阈值或限制,例如,其限制提供给加湿器加热器、呼吸导管加热器和/或流发生器的电功率。
上述呼吸治疗装置和系统可以被配置为与远程系统(例如服务器或远程患者和装置管理系统)通信。当检测到液体冷凝物时,控制器可以被配置为向远程系统发送消息或信号。这可能是有利的,因为远程系统可以监控呼吸装置的故障状况并记录诸如呼吸导管中的液体冷凝物的故障实例。此外,呼吸治疗装置或系统可以被配置为与移动装置通信,例如当在家庭护理中使用时的患者的移动装置或临床医生的移动装置。当检测到液体冷凝物时,可以向移动装置发送消息以关于呼吸导管中的液体冷凝物来警告患者或临床医生。
除非上下文明确要求,否则在整个描述中,词语“包括(comprise)”、“包括(comprising)”等被解释成涵盖性意义而非独占或详尽意义,即,被解释成“包括但不限于”的意义。
尽管已经通过实例且参考其可能配置来描述本发明,但应理解,在不脱离本发明的范围的情况下,可以对本发明进行修改或改进。本发明还可以广义地说成在于本申请的说明书中单独地或共同地提及或指示的部分、元件和特征,以及两个或更多个所述部件、元件或特征的任何或所有组合。此外,在提及本发明的具有已知等同物的具体部件或整体的情况下,那么此类等同物合并在此,如同单独进行了阐述一般。
在整个本说明书中对现有技术的任何讨论决不应该被认为承认这种现有技术是广泛已知的或形成本领域中公共常识的一部分。
- 用于对呼吸治疗系统的导管中的水进行检测的系统和方法
- 用于呼吸治疗系统的气体输送导管