就地热再生机组编队无人驾驶系统及方法
文献发布时间:2023-06-19 12:19:35
技术领域
本发明涉及一种车辆编队无人驾驶系统及方法,更具体的说,尤其涉及一种就地热再生机组编队无人驾驶系统及方法。
背景技术
高速公路是社会经济发展的“快捷通道”,条条高速遍神州,交通运输部指出,2020年我国高速公路总里程将突破15万公里。近年来,由于我国经济飞速发展,高速公路承载交通压力越来越大,路面故障的问题表现越来越多,高速公路养护管理工作越来越受到人们的重视。沥青路面就地热再生技术以其施工速度快、废料100%再生利用、交通影响小的优点,在沥青路面养护维修中应用广泛。就地热再生技术针对受损的旧沥青路面,通过就地热再生机组对路面进行加热、铣刨、翻松、回收处理,然后添加一定比例的再生剂、新沥青混合料使其重新恢复性能,达到使用要求的工艺技术。编队控制的研究来源于人们对大自然动物行为的探索,蚁群的分工合作,大雁的迁徙,鱼群的捕食,无不体现着合作协同的思想,他们通过肢体动作进行交流和互换信息,从而实现个体间的群体协作,高效的共同完成复杂任务。
近年来,编队控制广泛的应用在无人机编队、水下设备编队、多机器人编队以及多车编队中。无人车辆编队行驶控制的核心问题是车辆的跟随控制。多车组成编队协同行驶时,车辆之间需要保持相对固定的几何位姿及运动状态,同时又要满足任务需求和适应周边环境约束。车队中的无人驾驶汽车通过调节自身的行驶速度和转向,使得自身与相邻行驶车辆之间保持稳定的相对状态,从而实现多无人驾驶车辆之间以无线通信为纽带的编队行为。
目前就地热再生机组采用人工驾驶的方式,存在作业精度低、能源损耗高、施工环境差等问题,因此,实现就地热再生机组的编队协同无人驾驶意义重大,不仅提升养护施工质量,还可以提高施工作业效率。站在“十四五规划”的开局之年,把握新机遇,贯彻新理念,促进就地热再生技术的推广应用。
发明内容
本发明为了克服上述技术问题的缺点,提供了一种就地热再生机组编队无人驾驶系统及方法。
本发明的就地热再生机组编队无人驾驶系统,包括路径采集装置、加热机、铣刨机、HMI交互中心和差分GPS基站,加热机、铣刨机的数量均为1台或1台以上,最前端的加热机作为领航车辆,其余的加热机和铣刨机作为跟随车辆,领航车辆和跟随车辆上均设置有智能驾驶控制器;路径采集装置根据路面标线行驶,并通过与差分GPS基站的通信获取自身的实时位置信息,进而规划出行驶路径,并将规划的行驶路径发送至HMI交互中心;其特征在于:领航车辆和跟随车辆上的智能驾驶控制器与HMI交互中心和差分GPS基站均通过无线网络相通信;领航车辆通过与差分GPS基站的通信实时获取自身的位置信息,通过与HMI交互中心的通信获取行驶路径信息,并将自身的位置、速度和加速度信息发送至HMI交互中心;
跟随车辆通过与差分GPS基站的通信实时获取自身的位置信息,通过与HMI交互中心的通信获取行驶路径以及前车的位置、速度和加速度信息,并将自身的位置和加速度信息上传至HMI交互中心;领航车辆和跟随车辆上的智能驾驶控制器根据获取的行驶路径和自身的位置实现行驶路径跟随控制,跟随车辆根据获取的前车位置和加速度实现纵向车距跟随控制。
本发明的就地热再生机组编队无人驾驶系统,包括根据施工的实际需求对跟随车辆进行手动操控的车辆遥控器。
本发明的就地热再生机组编队无人驾驶系统的自动驾驶控制方法,其特征在于,通过以下步骤来实现:
a).规划行驶路径,路径采集装置以路面标线为参照行驶,在行驶的过程中通过与差分GPS基站的通信实时获取自身的位置坐标,进而规划出行驶路径,并将规划出的行驶路径信息上传至HMI交互中心;
b).获取车辆到行驶路径的距离和正负,领航车辆和跟随车辆上的智能驾驶控制器首先通过与HMI交互中心的通信获取行驶路径信息,通过与差分GPS基站的通信获取自身的实时位置信息,然后计算出当前位置与行驶路径之间的距离大小,以及当前位置相对于行驶路径的位置正负;
c).行驶路径跟随控制,领航车辆和跟随车辆上的智能驾驶控制器根据步骤b)中计算出的距离大小和位置正负,采用位置正负决定车辆的方向盘转向、距离大小决定方向盘的转向角度大小的PID控制方法来控制自身的自动驾驶,以实现行驶路径的跟随控制;
d).获取前车距离和加速度,跟随车辆上的智能驾驶控制器通过与HMI交互中心的通信,实时获取前车的加速度和位置坐标,并根据前车的位置坐标计算出与前车之间的距离;
e).跟随车辆的纵向车距跟随控制,跟随车辆通过步骤d)中获取的前车的加速度和距离来对自身的行驶速度进行纵向车距跟随控制,以便将跟随车辆之间的车距、跟随车辆与领航车辆之间的车距控制在设定车距之内。
本发明的就地热再生机组编队无人驾驶系统的自动驾驶控制方法,步骤b)所述的领航车辆或跟随车辆到行驶路径的距离通过以下步骤来求取:
b-1).获取当前位置,领航车辆或跟随车辆上的智能驾驶控制器获取其当前位置坐标,设为当前位置坐标为P
b-2).建立距离公式,设领航车辆或跟随车辆上的智能驾驶控制器所获取的领航车辆规划的行驶路径曲线方程如公式(1)所示:
y=ax
则领航车辆或跟随车辆当前位置与行驶路径上任一点P(x,y)的之间的距离通过公式(2)进行求取:
令:
L=(x
将公式(1)带入公式(3)中化简得:
将等式方程(4)对x一次求导得:
b-3).利用牛顿法求L′=0的近似解;
令:
迭代初始值为:
x
迭代公式为:
x
精度阈值为10
设求得的近似解为:x=x
b-4).计算当前位置到行驶路径曲线的最短距离,将步骤b-3)求得的近似解x=x
经公式(10)求切线与X轴的夹角θ
tanθ
设领航车辆或跟随车辆的当前位置P
本发明的就地热再生机组编队无人驾驶系统的自动驾驶控制方法,步骤b)所述的领航车辆或跟随车辆到行驶路径的位置正负通过以下步骤来求取:
b-5).建立与路径终点连线夹角,设P′(x,y′)为车辆行驶过程中真实的坐标点,点P″(x″,y″)为规划路径曲线方程y=ax
b-6).夹角的求取,设夹角θ
phid=atan2(y”-y,x”-x) (12)
phir=atan2(y”-y,x”-x') (13)
其中atan2函数通过如下公式求取:
b-7).判断位置正负,由于坐标的象限可能不同,通过公式(15)求取phid与phir的差值:
err_phi=phid-phir (15)
通过公式(16)求出实际反正切差值err_phi:
根据公式(16)求出反正切差值err_phi后,当err_phi大于0时,表明距离偏差为正;当err_phi小于0时,表明距离偏差为负;当err_phi等于0时,表明不存在距离偏差。
本发明的就地热再生机组编队无人驾驶系统的自动驾驶控制方法,步骤c)中,当err_phi大于0时,表示车辆当前位置位于路径曲线的左侧,应向右打方向盘,方向盘的转动角度大小与车辆距离路径曲线的距离d成正比,使车辆向右行驶;当err_phi小于0时,表示车辆当前位置位于路径曲线的右侧,应向左打方向盘,方向盘的转动角度大小与车辆距离路径曲线的距离d成正比,使车辆向左行驶;当err_phi等于0时,保持方向盘方向不变;通过周期性的、不间断的调整车辆的方向盘,进而控制车辆的行驶路径,实现车辆的自动驾驶。
本发明的就地热再生机组编队无人驾驶系统的自动驾驶控制方法,步骤d)所述的获取前车距离和领航车辆加速度具体通过以下步骤来实现:
d-1).计算前车实际车距,设车辆之间的设定车距为D;跟随车辆通过与差分GPS基站的通信,获取自身的位置坐标,通过与HMI交互中心的通信获取前车的位置坐标,进而计算出与前车的实际车距Di;然后通过公式(17)计算出设定车距与实际车距之间的车距偏离差:
e
本次车距偏差与上一次车距偏差的差值称为车距偏差的变化率,记为e
e
d-2).获取领航车辆加速度,跟随车辆通过与HMI交互中心的通信,获取领航车辆的加速度值,设为a;
步骤e)中所述的跟随车辆的纵向车距跟随控制通过以下步骤来实现:
e-1).将步骤d-1)中获取的车距偏离差e
e-2).将步骤d-2)中获取的前车加速度a输入至前馈PD控制算法,再与步骤e-1)中输出的模糊控制数值相加,然后输入到跟随车辆的智能驾驶控制器中,实现对跟随车辆的纵向车距跟随控制。
本发明的就地热再生机组编队无人驾驶系统的自动驾驶控制方法,步骤c)中所述的行驶路径跟随控制中的PID控制算法中,比例参数kp=3-5,积分参数ki=0.005-0.015,微分参数kd=0.0005-0.0015;步骤e-2)中所述的前馈PD控制算法中,比例参数kp'=0.5-1.5,微分参数kd'=0.05-0.15。
本发明的有益效果是:本发明的就地热再生机组编队无人驾驶系统,设置有路径采集装置、HMI交互中心、差分GPS基站、多台加热机和铣刨机以及设置于车辆上的智能驾驶控制器,最前端的加热机作为领航车辆,其余的加热机和铣刨机作为跟随车辆,路径采集装置首先规划出行驶路径并发送至HMI交互中心,由HMI交互中心发送至领航车辆和跟随车辆,车辆上的智能驾驶控制器根据获取的行驶路径信息和自身位置实现路径跟随控制,根据获取的前车加速度及与前车车距实现纵向车距跟踪控制,以实现就地热再生机组编队的无人驾驶作业。
本发明的就地热再生机组编队无人驾驶系统的自动驾驶控制方法,领航车辆和跟随车辆根据自身位置坐标,计算出当前位置与行驶路径曲线间的最短距离,以及位置的正负,然后采用位置正负决定方向盘转向、距离决定转向角度的PID控制方法来实现行驶路径的跟随控制,可使每辆车辆均可按照规划的行驶路径形式。跟随车辆通过获取自身和前车的位置坐标来计算出前车实际车距,设定车距与实际车距的偏差及偏差的变化率作为模糊控制的输入,并根据前车加速度进行加速度前馈PD控制,采用模糊控制+加速度前馈PD相结合的方法来实现车距纵向跟随控制,可将每辆车与前车的车距控制在设定车距范围内。本发明的就地热再生机组编队无人驾驶系统及方法,可使就地热再生机组中的每辆车辆均按照规划路径形式,满足无人驾驶条件下就地热再生机组对沥青路面的重铺作业的精度要求,解决了加热机、铣刨机速度波动所带来的能源消耗高的问题,由于采用无人驾驶作业,改善了作业人员的施工环境。
附图说明
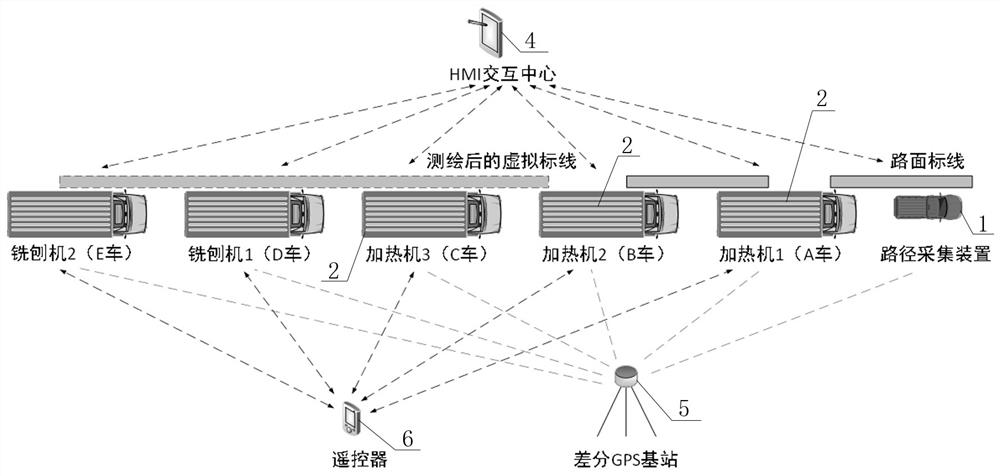
图1为本发明的就地热再生机组编队无人驾驶系统的原理图;
图2为本发明中跟随车辆的纵向车距跟随控制的原理图;
图3为本发明中领航车辆和跟随车辆的行驶路径跟随控制方法示意图;
图4为本发明中车辆实际位置与行驶路径曲线最短距离的求解示意图;
图5为本发明中车辆位置到行驶路径的正负计算示意图;
图6为本发明中跟随车辆的纵向车距跟随控制的方法示意图;
图7为实例中车辆实际运行轨迹与期望行驶路径的曲线图;
图8为实例中路径偏差随时间的变化关系;
图9为实例中角度偏差随时间的变化关系;
图10为实例中匀速条件下领航车辆与跟随车辆车距随时间的变化曲线图;
图11为实例中领航车辆加速运动时在无加速度反馈PD控制的情况下得到的车距曲线;
图12为实例中领航车辆加速运动时有无加速度反馈PD控制的情况下得到的车距曲线;
图中:1路径采集装置,2跟随车辆,3领航车辆,4HMI交互中心,5差分GPS基站,6车辆遥控器。
具体实施方式
下面结合附图与实施例对本发明作进一步说明。
如图1所示,给出了本发明的就地热再生机组编队无人驾驶系统的原理图,图2给出了本发明中跟随车辆的纵向车距跟随控制的原理图,其由路径采集装置1、HMI交互中心4、差分GPS基站5以及多个加热机和铣刨机组成,最前端的加热机作为领航车辆,其余的每个加热机和铣刨机作为单独的跟随车辆2。路径采集装置1、领航车辆3和跟随车辆2均与差分GPS基站5无线通信,以获取自身的位置信息;路径采集装置1、领航车辆3和跟随车辆2均与HMI交互中心无线通信,以实现数据信息的上传和接收。差分GPS基站5设置于施工路段的中点位置处。路径采集装置1依据路面标线(或施工时现画的水样标线)进行行驶,并根据实时获取的自身位置坐标规划出路段施工过程中的行驶路径曲线,并将规划的行驶路径数据上传至HMI交互中心4。
在就地热再生机组编队对沥青路面翻新作业过程中,以领航车辆3在前、跟随车辆2在后的布置行驶,领航车辆3和跟随车辆2首先通过与HMI交互中心4的通信获取行驶路径信息,然后根据与差分GPS基站5通信获取的自身坐标实现行驶路径的跟随控制。同时,跟随车辆2根据获取的前车的加速度和自身与前车的实际车距来实现车距纵向跟随控制。还包括对跟随车辆2进行手动操控的车辆遥控器6,以根据施工的实际需求单独对每辆车辆进行控制。
首先,需要说明的一点是,受外界环境的不同,施工过程中路面的温度会存在不同,为了将路面温度加热到铣刨机工作的合适温度,所需加热机的加热功率或时长也会不同,如果加热时长过程,会造成能源的浪费,如果加热温度不够,又会影响正常铣刨。这就需要根据实际情况对整个就地热再生机组编队的行进速度进行调整,速度的调整是通过领航车辆3(即最前端的加热机)来实现的。领航车辆3在加速或减速的过程中,会造成车距的变化,为了保证车距在设定范围内,本发明的控制方法引入了根据领航车辆加速度来控制车距的概念和方法,以有效避免领航车辆3加速或减速所带来的车距的较大波动。
本发明的就地热再生机组编队无人驾驶系统的自动驾驶控制方法,通过以下步骤来实现:
a).规划行驶路径,路径采集装置以路面标线为参照行驶,在行驶的过程中通过与差分GPS基站的通信实时获取自身的位置坐标,进而规划出行驶路径,并将规划出的行驶路径信息上传至HMI交互中心;
b).获取车辆到行驶路径的距离和正负,领航车辆和跟随车辆上的智能驾驶控制器首先通过与HMI交互中心的通信获取行驶路径信息,通过与差分GPS基站的通信获取自身的实时位置信息,然后计算出当前位置与行驶路径之间的距离大小,以及当前位置相对于行驶路径的位置正负;
该步骤中,领航车辆或跟随车辆到行驶路径的距离通过以下步骤来求取:
b-1).获取当前位置,领航车辆或跟随车辆上的智能驾驶控制器获取其当前位置坐标,设为当前位置坐标为P
b-2).建立距离公式,设领航车辆或跟随车辆上的智能驾驶控制器所获取的领航车辆规划的行驶路径曲线方程如公式(1)所示:
y=ax
则领航车辆或跟随车辆当前位置与行驶路径上任一点P(x,y)的之间的距离通过公式(2)进行求取:
令:
L=(x
将公式(1)带入公式(3)中化简得:
将等式方程(4)对x一次求导得:
b-3).利用牛顿法求L′=0的近似解;
令:
迭代初始值为:
x
迭代公式为:
x
精度阈值为10
设求得的近似解为:x=x
b-4).计算当前位置到行驶路径曲线的最短距离,将步骤b-3)求得的近似解x=x
经公式(10)求切线与X轴的夹角θ
tanθ
设领航车辆或跟随车辆的当前位置P
领航车辆或跟随车辆到行驶路径的位置正负通过以下步骤来求取:
b-5).建立与路径终点连线夹角,设P′(x,y′)为车辆行驶过程中真实的坐标点,点P″(x″,y″)为规划路径曲线方程y=ax
b-6).夹角的求取,设夹角θ
phid=atan2(y”-y,x”-x) (12)
phir=atan2(y”-y,x”-x') (13)
其中atan2函数通过如下公式求取:
b-7).判断位置正负,由于坐标的象限可能不同,通过公式(15)求取phid与phir的差值:
err_phi=phid-phir (15)
通过公式(16)求出实际反正切差值err_phi:
根据公式(16)求出反正切差值err_phi后,当err_phi大于0时,表明距离偏差为正;当err_phi小于0时,表明距离偏差为负;当err_phi等于0时,表明不存在距离偏差。
c).行驶路径跟随控制,领航车辆和跟随车辆上的智能驾驶控制器根据步骤b)中计算出的距离大小和位置正负,采用位置正负决定车辆的方向盘转向、距离大小决定方向盘的转向角度大小的PID控制方法来控制自身的自动驾驶,以实现行驶路径的跟随控制;
该步骤中,当err_phi大于0时,表示车辆当前位置位于路径曲线的左侧,应向右打方向盘,方向盘的转动角度大小与车辆距离路径曲线的距离d成正比,使车辆向右行驶;当err_phi小于0时,表示车辆当前位置位于路径曲线的右侧,应向左打方向盘,方向盘的转动角度大小与车辆距离路径曲线的距离d成正比,使车辆向左行驶;当err_phi等于0时,保持方向盘方向不变;通过周期性的、不间断的调整车辆的方向盘,进而控制车辆的行驶路径,实现车辆的自动驾驶。
d).获取前车距离和加速度,跟随车辆上的智能驾驶控制器通过与HMI交互中心的通信,实时获取前车的加速度和位置坐标,并根据前车的位置坐标计算出与前车之间的距离;
该步骤中,获取前车距离和加速度具体通过以下步骤来实现:
d-1).计算前车实际车距,设车辆之间的设定车距为D;跟随车辆通过与差分GPS基站的通信,获取自身的位置坐标,通过与HMI交互中心的通信获取前车的位置坐标,进而计算出与前车的实际车距Di;然后通过公式(17)计算出设定车距与实际车距之间的车距偏离差:
e
本次车距偏差与上一次车距偏差的差值称为车距偏差的变化率,记为e
e
d-2).获取领航车辆加速度,跟随车辆通过与HMI交互中心的通信,获取领航车辆的加速度值,设为a;
e).跟随车辆的纵向车距跟随控制,跟随车辆通过步骤d)中获取的前车的加速度和距离来对自身的行驶速度进行纵向车距跟随控制,以便将跟随车辆之间的车距、跟随车辆与领航车辆之间的车距控制在设定车距之内。
该步骤中,跟随车辆的纵向车距跟随控制通过以下步骤来实现:
e-1).将步骤d-1)中获取的车距偏离差e
e-2).将步骤d-2)中获取的前车加速度a输入至前馈PD控制算法,再与步骤e-1)中输出的模糊控制数值相加,然后输入到跟随车辆的智能驾驶控制器中,实现对跟随车辆的纵向车距跟随控制。
步骤c)中所述的行驶路径跟随控制中的PID控制算法中,比例参数kp=3-5,积分参数ki=0.005-0.015,微分参数kd=0.0005-0.0015;步骤e-2)中所述的前馈PD控制算法中,比例参数kp'=0.5-1.5,微分参数kd'=0.05-0.15。
实际应用实例:
根据对实际施工路段的行驶路径规划,规划出了如公式(19)所示的行驶路径曲线:
然后获取到领航车辆3初始位置横坐标为0.1、纵坐标为0.1,初始速度为3m/min,计算出领航车辆3的当前位置偏差(距离规划行驶路径的最短距离及正负),输入至kp=4、ki=0.01、kd=0.001的PID控制器,得到领航车辆3的实际运行轨迹与公式(16)所示的期望行驶路径的曲线图。
如图8和图9所示,分别给出了路径偏差、角度偏差随时间的变化关系,可见,在时间为130s时,位置偏差基本为零,并继续保持稳定,同时控制的角度输出稳定。智能体实际跟踪的轨迹在稳定后基本与期望轨迹重合,能够满足控制要求。
设车距设定值为2m,在领航车辆3匀速行驶的状态下,初始车距设定为2.2m(大于2m),如图10所示,给出了领航车辆3匀速条件下领航车辆与跟随车辆车距随时间的变化曲线图,车距在120s附近达到设定车距并趋于稳定,响应速度与精确性均满足系统设计要求。
如果在领航车辆3匀速行驶的过程中,在某个时刻进行加速运动,在无加速度反馈PD控制的情况下,得到的车距曲线图如图11所示,可见,车距波动较大。
在领航车辆3匀速行驶的过程中,在某个时刻进行加速运动,在有无加速度反馈PD控制的情况下,得到的车距曲线图如图12所示,可见,通过加速度前馈PD控制结合模糊控制,大大削弱了因速度变化车距出现波动较大的现象,使得跟随车辆智能体能够在较短的时间内追踪设定车距并趋于稳定。控制效果明显优于模糊控制,纵向控制精度满足系统控制要求。
- 就地热再生机组编队无人驾驶系统及方法
- 基于Lora的就地热再生机组数据共享方法、系统及监控系统