一种移动式焊接机器人
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及焊接机器人设备技术领域,更具体的说是一种移动式焊接机器人。
背景技术
公开号为CN107378333A的发明公开了一种一体式智能焊接机器人系统及焊接方法,焊接机器人工作站的内部设置有焊接机器人和清枪剪丝机,焊接机器人工作站的前端面左侧边嵌入有触摸屏,焊接机器人工作站的前端面中部位置分别设置有两个安全光栅,安全光栅的左侧部均设置有工作站快速门和工作站快速门伺服系统,工作站快速门连接工作站快速门伺服系统。本发明有益效果:焊接机器人工作站内部机器人、清枪剪丝器、各气路/线路分布,负责快速门的升降,控制快速门,安全光栅更换零件时的安全检测,预约启动按钮预约/启动工位加工控制,急停按钮紧急情况快速急停加工工位,触摸屏用于焊接机器人工作站控制,三色报警器可显示、提醒工作站工作情况。该发明的缺点是不能对两个焊接母材的不同距离的焊接面进行加工。
发明内容
本发明的目的是提供一种移动式焊接机器人,具有能对两个焊接母材的不同距离的焊接面进行加工的优点。
本发明的目的通过以下技术方案来实现:
一种移动式焊接机器人,包括至少两个加工件,全部加工件能够连接成一个虚拟的圆形外轮廓线,所述全部加工件之间能够收缩和张开。
每个加工件的运动轨迹均为线性直线。
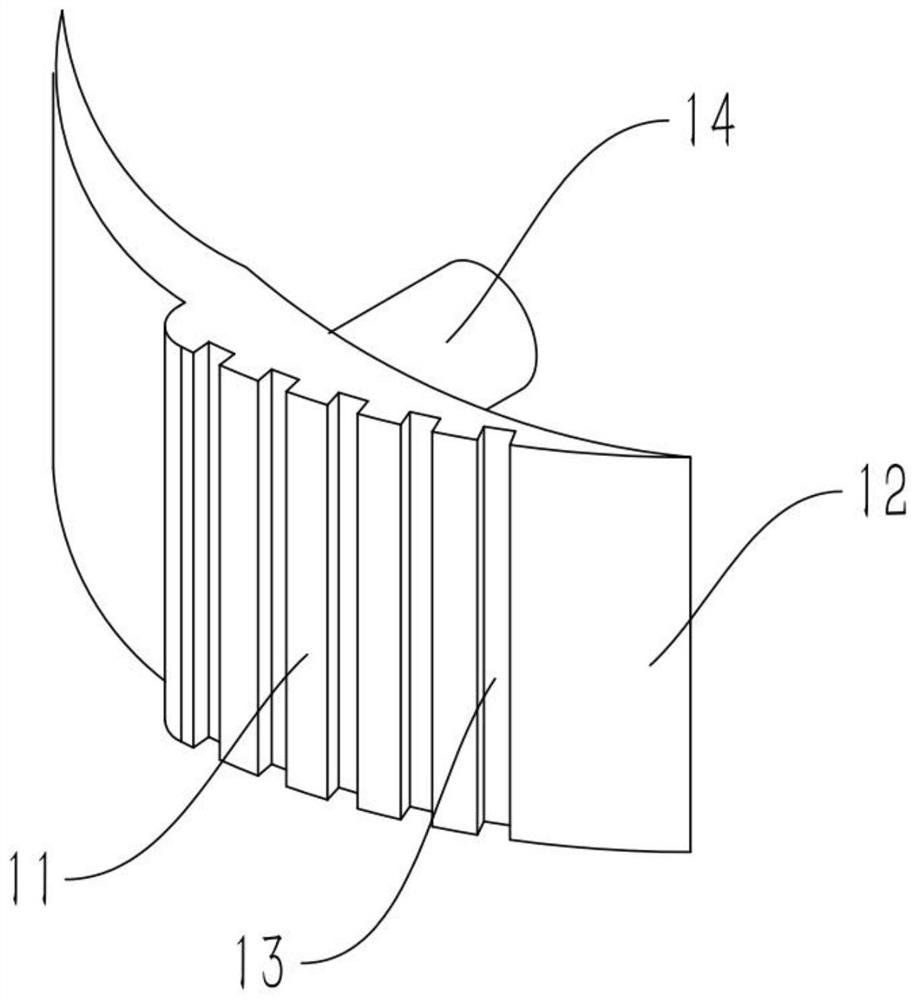
多个所述加工件均包括打磨头和加工套管,多个加工套管上均固接有打磨头。
所述移动式焊接机器人还包括滑动支架,多个加工套管均滑动连接在滑动支架上。
多个所述加工件还包括铣削刀刃和导流槽,多个打磨头上均设置有铣削刀刃,多个打磨头上均设置有多个导流槽。
所述移动式焊接机器人还包括滑动套管、涂料弧板和涂料滑杆,滑动支架上滑动连接有多个滑动套管,多个滑动套管滑动套管上均连接有涂料滑杆,多个涂料滑杆上均固定连接有涂料弧板。
多个所述涂料弧板和涂料滑杆上均套有海绵套。
所述移动式焊接机器人还包括调节轴孔、调节轴、调节板、连杆和调节环,所述滑动支架上设置有调节轴孔,调节轴孔上滑动连接有调节轴,调节轴上固定连接有调节板,调节板上转动连接有多个连杆,多个连杆上均转动连接有调节环,多个滑动套管和多个加工套管分别固定连接在多个调节环上。
所述移动式焊接机器人还包括避让气缸和避让连杆,多个涂料滑杆上均固定连接有避让连杆,多个避让连杆分别固定连接在多个避让气缸的气缸杆上,多个避让气缸分别通过安装板固定连接在对应的调节环上。
所述移动式焊接机器人还包括密封板和弹簧,多个涂料滑杆上均固定连接有密封板,多个密封板上均固定连接有弹簧,多个弹簧分别固定连接在多个滑动套管上,多个涂料滑杆分别滑动连接在多个滑动套管内。
本发明一种移动式焊接机器人的有益效果为:可以通过多个打磨头的转动直径的调节,实现对不同间距的两个母材的焊接面的打磨;还可以通过多个打磨头以及多个铣削刀刃的两个转动方向的切换,实现对两个母材的焊接面的铣削加工和打磨加工的两个功能的切换使用,还可以通过两个母材的焊接面在打磨时对多个涂料弧板的压缩,实现多个涂料弧板对两个母材的焊接面进行助焊剂的均匀涂抹。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
图1是立体图示意性显示了本发明的第一部分结构;
图2是立体图示意性显示了本发明的第二部分结构;
图3是立体图示意性显示了本发明的第三部分结构;
图4是立体图示意性显示了本发明的第四部分结构;
图5是立体图示意性显示了本发明的第五部分结构;
图6是立体图示意性显示了本发明的第六部分结构;
图7是立体图示意性显示了本发明的部分结构。
图中:打磨头11;铣削刀刃12;导流槽13;加工套管14;滑动支架21;调节轴孔22;调节轴31;调节板32;连杆33;调节环34;组合套管41;滑动槽42;加料孔43;储料槽44;分隔板45;避让气缸51;避让连杆52;涂料弧板61;涂料滑杆62;密封板63;弹簧64。
具体实施方式
容易理解,根据本发明的技术方案,在不变更本发明实质精神下,本领域的一般技术人员可以提出可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本发明的技术方案的示例性说明,而不应当视为本发明的全部或者视为对本发明技术方案的限定或限制。
在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于各附图中所示的构造进行定义的,它们是相对的概念,因此有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。另外,第一、第二、第三等等类似描述用于区分而不是用于限定重要性。
下面结合附图对本发明作进一步详细说明。
两个焊接母材需要根据母材厚度的不同调节两个母材焊缝的距离,而多个加工件的收缩和张开可以对不同大小的焊缝进行定位,确保焊边不规整的母材进行加工后,两个母材间的焊缝距离相同。
多个加工件向中心收缩则多个加工件的转动直径缩小,可以对焊缝小的母材进行加工,而多个加工件背离中心滑动,则多个加工件的转动直径变大,可以对两个较厚的母材,较大的焊缝进行加工。
该部分根据图1中所示移动式焊接机器人的一个示例性的工作过程是:当多个打磨头11转动时,多个打磨头11的外侧弧形面对所接触的平面进行打磨,实现两个母材焊接处的平面的平整性和光洁性。
该部分根据图1和2中所示移动式焊接机器人的一个示例性的工作过程是:多个加工套管14在滑动支架21上进行滑动,多个加工套管14带动多个打磨头11滑动,从而实现多个打磨头11的转动直径的调节,进而实现对不同间距的两个母材的焊接面的打磨。
该部分根据图1中所示移动式焊接机器人的一个示例性的工作过程是:当多个打磨头11转动时,多个打磨头11先接触到两个焊接母材时,多个打磨头11对两个焊接的母材对应的两个焊接面进行打磨,而打磨掉的碎屑可以通过多个打磨头11上的多个导流槽13将打磨下来的碎屑进行排出,防止过多的碎屑堆积,造成多个打磨头11的打磨弧面出现碎屑,影响多个打磨头11对两个母材焊接面的打磨效果,影响最终的焊接效果,当多个打磨头11转动时,多个铣削刀刃12先接触到两个焊接母材的焊接平面,则多个铣削刀刃12的转动会对两个焊接平面进行铣削,确保两个焊接平面的距离的相等,还可以确保两个焊接平面凹凸不平时进行两个焊接平面的铣削平整。
该部分根据图4和6中所示移动式焊接机器人的一个示例性的工作过程是:多个涂料滑杆62可以在对应的滑动套管内进行滑动,实现多个涂料滑杆62带动多个涂料弧板61进行伸缩滑动,便于多个涂料弧板61将滑动套管内的助焊剂涂抹在两个焊接面上,方便焊接母材后续的焊接。
该部分根据图4和6中所示移动式焊接机器人的一个示例性的工作过程是:当涂料滑杆62上的海绵套滑进滑动套管内,将滑动套管内部的助焊剂吸收到涂料滑杆62的海绵套上,再被涂料弧板61上的海绵套吸收,当多个涂料弧板61转动时,通过两个焊接面对多个涂料弧板61的挤压和摩擦,使得多个涂料弧板61上的海绵套对两个焊接面进行助焊剂的均匀涂抹,方便两个焊接面的后续焊接。
该部分根据图2和3中所示移动式焊接机器人的一个示例性的工作过程是:当调节轴22进行升降运动时,调节轴31带动调节板32进行竖直方向的线性运动,调节板32带动多个连杆33的上端进行线性运动,多个连杆33的下端在多个调节环34的限位下,推拉多个调节环34进行水平方向的线性,多个调节环34带动多个加工套管14进行水平面上的线性滑动,实现对多个打磨头11和多个涂料弧板61的转动直径的调节。
该部分根据图1、5和6中所示移动式焊接机器人的一个示例性的工作过程是:启动多个避让气缸51,多个避让气缸51的气缸杆带动多个避让连杆52进行气缸杆轴线上的线性运动,多个避让连杆52带动多个涂料滑杆62进行线性滑动从而实现多个涂料弧板61在进行转动直径调节后的小距离调整,避免在多个铣削刀刃12进行转动对焊接面进行铣削时,多个涂料弧板61接触到两个未经打磨的铣削平面,造成多个涂料弧板61及其上的海绵套的刮伤,当多个打磨头11对两个焊接的母材对应的两个焊接面进行打磨时,启动多个避让气缸51带动多个涂料弧板61伸出,使得多个涂料弧板61的转动直径大于多个打磨头11的转动直径,使得多个涂料弧板61可以对两个焊接面进行助焊剂的涂抹。
该部分根据图4和6中所示移动式焊接机器人的一个示例性的工作过程是:当多个涂料弧板61被两个焊接面压缩时,多个密封板63在滑动时压缩对应的弹簧64,使得多个涂料滑杆62与多个滑动套管内的助焊剂进行接触,确保多个涂料滑杆62和多个涂料弧板61外的海绵套上吸附有足够的助焊剂,且多个涂料弧板61伸缩一次吸附一次助焊剂,防止多个涂料弧板61外的海绵套上的助焊剂过多,造成两个焊接面的助焊剂涂抹的补均匀,造成助焊剂的浪费,同时也影响两个焊接母材的焊接效果,当多个涂料弧板61不与两个焊接平面接触时,压缩的多个弹簧64复位,防止多个滑动套管内的助焊剂出现泄露。
该部分根据图4和6中所示移动式焊接机器人的一个示例性的工作过程是:多个所述滑动套管均包括组合套管41、滑动槽42、加料孔43、储料槽44和分隔板45,组合套管41上设置有滑动槽42和储料槽44,设置有滑动槽42和储料槽44连通,组合套管41上设置有加料孔43,加料孔43和储料槽44连通,组合套管41内固定连接有分隔板45,多个滑动槽42内均滑动连接有涂料滑杆62,多个弹簧64分别固定连接在多个分隔板45上。
当多个密封板63在滑动时,多个密封板63失去对储料槽44的密封,多个密封板63压缩多个弹簧64,使得储料槽44与涂料滑杆62接触,而涂料滑杆62上套设的海绵套与对应的储料槽44接触,储料槽44内的助焊剂被涂料滑杆62上套设的海绵套吸收,进而被多个涂料弧板61上套设的海绵套吸收,当多个涂料弧板61不与两个焊接平面接触时,压缩的多个弹簧64复位,防止多个滑动套管内的助焊剂出现泄露,当两个焊接母材焊接完成后,再次对多个储料槽44内进行助焊剂的添加。
该部分根据图4和6中所示移动式焊接机器人的一个示例性的工作过程是:多个所述密封板63与滑动槽42接近的一面均设置有密封环。
多个密封板63上的密封环在密封板63与滑动槽42的端面接触时,该密封环对对应的储料槽44进行密封,防止滑动槽42内的助焊剂出现泄露,造成资源的浪费。
该部分根据图4中所示移动式焊接机器人的一个示例性的工作过程是:多个所述加料孔43上均设置有单向阀门,多个单向阀门分别与对应的滑动槽42连通。
多个滑动槽42内的助焊剂经过一次焊接后,就需要进行补充,而多个单向阀门可以实现助焊剂的单向添加,且有效防止多个滑动槽42内的助焊剂从添加口的流出,并且通过多个单向阀门可以实现助焊剂的快速添加,与常用的通过螺纹连接的盖相比,添加更加方便,使用更加便捷,且具有更加良好的密封性能,保证助焊剂不从缝隙处泄露的可靠性。
该部分根据图1、2、4和6中所示移动式焊接机器人的一个示例性的工作过程是:所述移动式焊接机器人还包括驱动组件,该驱动组件的输出件固定连接在滑动支架21上。
启动驱动组件,驱动组件的输出件带动滑动支架21进行转动,滑动支架21带动多个加工套管14转动,多个加工套管14带动多个打磨头1转动板,实现对两个焊接面的打磨,滑动支架21带动多个组合套管41转动,多个组合套管41带动多个涂料滑杆62转动,多个涂料滑杆62带动多个涂料弧板61转动,实现多个涂料弧板61及其上的海绵套对两个焊接面的助焊剂的均匀涂抹,当驱动组件进行另一个方向转动时,滑动支架21带动多个加工套管14转动,多个加工套管14带动多个铣削刀刃12转动,对两个焊接面进行铣削加工。
所述移动式焊接机器人还包括升降调节组件,调节轴31固定连接在该升降调节组件上。
该部分根据图1、3和6中所示移动式焊接机器人的一个示例性的工作过程是:启动升降调节组件,升降调节组件可以实现带动调节轴31进行竖直方向上的升降,实现调节轴31调节多个打磨头11和多个涂料弧板61的转动直径,升降调节组件可以为气缸、液压缸、电动丝杆套装和齿轮齿条套装等可以实现升降功能的成品装置,均为本领域技术人员熟知的惯用技术手段。
所述移动式焊接机器人还包括焊接组件和支撑组件,该焊接组件、升降调节组件和驱动组件均固定连接在支撑组件上,支撑组件上设置有可自由移动和停止的行走机构,该焊接组件组件包括焊枪及调节焊枪位置的调节机构。
该焊接组件组件包括焊枪及调节焊枪位置的调节机构,焊接组件为常用的焊接装置,可以实现常用的焊接需求,该支撑组件上的行走机构可以在两个焊接母材固定的情况下,实现自由移动和停止,方便对两个焊接母材进行移动式的焊接和加工。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种汽车车身焊接用多自由度移动式六轴焊接机器人
- 一种用于超导焊接的可移动式焊接机器人