托盘搬送系统、托盘搬送方法以及托盘搬送程序
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及一种托盘搬送系统中的托盘的搬送控制。
背景技术
已知一种能够按照预先设定的调度表来依次加工大量工件的托盘搬送系统。关于托盘搬送系统,专利文献1(日本特开平09-174371号公报)公开了一种“在与用户的要求相应地新构建装置时、追加扩展设备时,能够提高配置变更时的设计、制造上的灵活性、扩展性,并且能够降低成本的托盘池式机械加工装置”(参照“摘要”)。
现有技术文献
专利文献
专利文献1:日本特开平09-174371号公报
发明内容
发明要解决的问题
托盘搬送系统包括作业工位、机床以及托盘收纳部等。作业人员在作业工位处进行将作为加工对象的工件安装于托盘的作业。当工件的安装作业完成时,托盘被搬送到机床,开始工件的加工。当工件的加工完成时,搭载该托盘的托盘被搬送到托盘收纳部或者作业工位。
如此,工件在搬送过程中被搬送到各种各样的场所。根据工件种类的不同,仅对具有特别的权限的人才能够公开加工过程、加工后的形状。因此,当工件在托盘搬送系统中被随机地搬送时,工件的秘密信息可能会向不具有权限的人公开。
本公开是为了解决上述那样的问题点而完成的,某一方面的目的在于提供一种能够防止在工件的搬送过程中泄露工件的秘密信息的托盘搬送系统。另一方面的目的在于提供一种能够防止在工件的搬送过程中泄露工件的秘密信息的托盘搬送方法。另一方面的目的在于提供一种能够防止在工件的搬送过程中泄露工件的秘密信息的托盘搬送程序。
用于解决问题的方案
在本公开的一例中,托盘搬送系统具备:搬送装置,其用于搬送能够安装工件的托盘;托盘收纳部,其为上述搬送装置搬送托盘的搬送目的地之一,用于收纳多个托盘;作业工位,其为上述搬送装置搬送托盘的搬送目的地之一,用于供作业人员对从上述托盘收纳部搬送来的托盘进行工件的安装作业;机床,其为上述搬送装置搬送托盘的搬送目的地之一,用于对在上述作业工位处被安装于托盘的工件进行加工;以及控制装置,其用于控制上述搬送装置。上述控制装置基于表示作为加工对象的工件是否是保密对象的信息,来判断该工件是否是保密对象,上述控制装置在判断为上述作为加工对象的工件不是保密对象的情况下,通过第一搬送方法来搬送安装有上述作为加工对象的工件的托盘,上述控制装置在判断为上述作为加工对象的工件是保密对象的情况下,通过与上述第一搬送方法不同的第二搬送方法来搬送安装有上述作为加工对象的工件的托盘。
在本公开的一例中,上述控制装置使安装有上述作为加工对象的工件的托盘的搬送路径在上述第一搬送方法与上述第二搬送方法中发生改变。
在本公开的一例中,上述托盘搬送系统具备多个上述机床。在上述第一搬送方法中,安装有上述作为加工对象的工件的托盘被搬送到多个上述机床中的空闲的机床。在上述第二搬送方法中,安装有上述作为加工对象的工件的托盘被搬送到多个上述机床中的预先决定的机床。
在本公开的一例中,在上述第一搬送方法中,安装有上述作为加工对象的工件的托盘被搬送到上述托盘收纳部的空闲的场所。在上述第二搬送方法中,安装有上述作为加工对象的工件的托盘被搬送到上述托盘收纳部的预先决定的场所。
在本公开的一例中,上述托盘搬送系统具备多个上述作业工位。在上述第一搬送方法中,安装有上述作为加工对象的工件的托盘被搬送到多个上述作业工位中的空闲的作业工位。在上述第二搬送方法中,安装有上述作为加工对象的工件的托盘被搬送到多个上述作业工位中的预先决定的作业工位。
在本公开的一例中,在上述第二搬送方法中,在预先决定的时间段中,禁止搬送安装有作为保密对象的工件的托盘。
在本公开的一例中,上述作业工位包括:显示器,其用于显示与作为加工对象的工件有关的信息;以及显示控制部,其用于控制上述显示器的显示。在上述作为加工对象的工件为保密对象的情况下,当对上述作业人员赋予了规定的第一权限时,上述显示控制部允许在上述显示器上显示与上述作为保密对象的工件有关的信息,在上述作为加工对象的工件为保密对象的情况下,当对上述作业人员赋予了比上述第一权限低的第二权限时,上述显示控制部限制与上述作为保密对象的工件有关的信息的显示。
在本公开的其它例子中,提供一种托盘搬送系统中的托盘搬送方法。上述托盘搬送系统具备:搬送装置,其用于搬送能够安装工件的托盘;托盘收纳部,其为上述搬送装置搬送托盘的搬送目的地之一,用于收纳多个托盘;作业工位,其为上述搬送装置搬送托盘的搬送目的地之一,用于供作业人员对从上述托盘收纳部搬送来的托盘进行工件的安装作业;以及机床,其为上述搬送装置搬送托盘的搬送目的地之一,用于对在上述作业工位处被安装于托盘的工件进行加工。上述托盘搬送方法包括以下步骤:基于表示作为加工对象的工件是否是保密对象的信息,来判断该工件是否是保密对象;在判断为上述作为加工对象的工件不是保密对象的情况下,通过第一搬送方法来搬送安装有上述作为加工对象的工件的托盘;以及在判断为上述作为加工对象的工件是保密对象的情况下,通过与上述第一搬送方法不同的第二搬送方法来搬送安装有上述作为加工对象的工件的托盘。
在本公开的其它例子中,提供一种在托盘搬送系统中执行的托盘搬送程序。上述托盘搬送系统:搬送装置,其用于搬送能够安装工件的托盘;托盘收纳部,其为上述搬送装置搬送托盘的搬送目的地之一,用于收纳多个托盘;作业工位,其为上述搬送装置搬送托盘的搬送目的地之一,用于供作业人员对从上述托盘收纳部搬送来的托盘进行工件的安装作业;以及机床,其为上述搬送装置搬送托盘的搬送目的地之一,用于对在上述作业工位处被安装于托盘的工件进行加工。上述托盘搬送程序使上述托盘搬送系统执行以下步骤:基于表示作为加工对象的工件是否是保密对象的信息,来判断该工件是否是保密对象;在判断为上述作为加工对象的工件不是保密对象的情况下,通过第一搬送方法来搬送安装有上述作为加工对象的工件的托盘;以及在判断为上述作为加工对象的工件是保密对象的情况下,通过与上述第一搬送方法不同的第二搬送方法来搬送安装有上述作为加工对象的工件的托盘。
发明的效果
在某一方面,能够防止在工件的搬送过程中泄露工件的秘密信息。
关于本发明的上述以及其它的目的、特征、方面以及优点,应该能够根据与附图相关联地理解的本发明所涉及的下面的详细说明而变得明确。
附图说明
图1是示出托盘搬送系统的外观的图。
图2是示出托盘搬送系统的装置结构的一例的图。
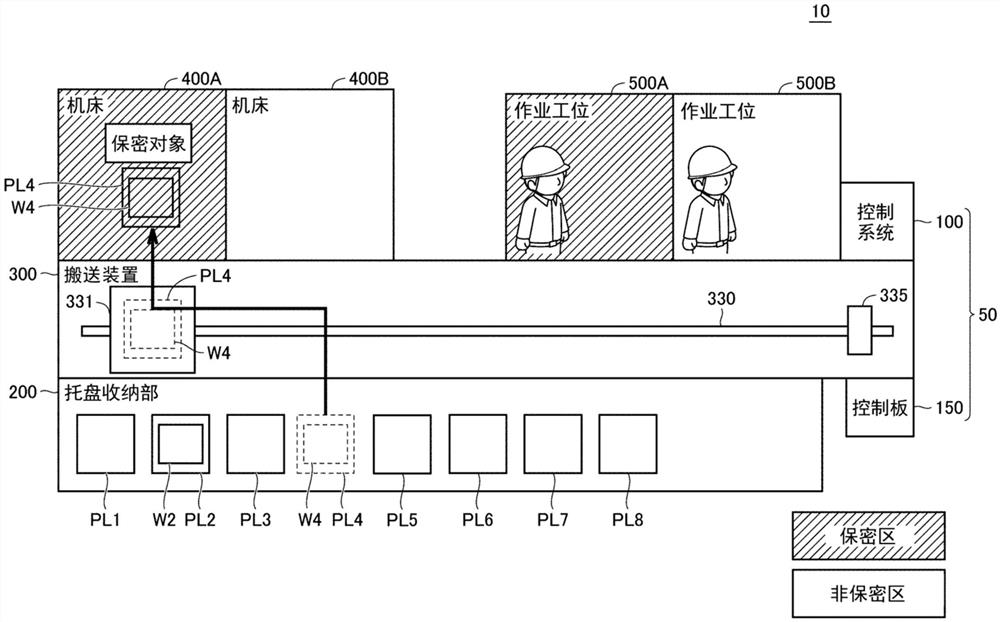
图3是示出保密搬送方法的具体例1的图。
图4是示出非保密搬送方法的具体例1的图。
图5是示出保密搬送方法的具体例2的图。
图6是示出非保密搬送方法的具体例2的图。
图7是示出保密搬送方法的具体例3的图。
图8是示出非保密搬送方法的具体例3的图。
图9是示出搬送禁止时间段的保密搬送方法的图。
图10是示出搬送允许时间段的保密搬送方法的图。
图11是示出保密设定画面的一例的图。
图12是概要性地示出构成托盘搬送系统的各种设备的协作关系的概念图。
图13是示出控制系统的硬件结构的一例的示意图。
图14是示出PLC(Programmable Logic Controller:可编程逻辑控制器)的主要的硬件结构的框图。
图15是示出机床的主要的硬件结构的框图。
图16是示出操作终端的硬件结构的一例的示意图。
图17是表示操作终端的处理器所执行的搬送处理的一部分的流程图。
具体实施方式
下面,参照附图来说明本发明的各实施方式。在下面的说明中,对于相同的部件和构成要素标注相同的标记。它们的名称和功能也相同。因而,不重复进行关于它们的详细说明。此外,在下面说明的各实施方式和各变形例可以适当选择性地组合。
参照图1来说明托盘搬送系统10。图1是示出托盘搬送系统10的外观的图。
如图1所示,托盘搬送系统10包括1个以上的托盘收纳部200、1个以上的搬送装置300、1个以上的机床400以及1个以上的作业工位500。
托盘收纳部200是搬送装置300搬送托盘PL的搬送目的地之一,是用于收纳托盘PL的场所。在托盘收纳部200中能够收纳多个托盘PL。在托盘收纳部200中能够收纳没有搭载工件的空的托盘、搭载有加工前的工件的托盘、搭载有加工过程中的工件的托盘、搭载有已加工的工件的托盘等。
搬送装置300将指定的托盘PL搬送到指定的场所。更具体地说,搬送装置300包括导轨330和台车331。台车331例如构成为能够通过后述的伺服马达335(参照图2)来沿导轨330移动。另外,台车331具有叉部333,该叉部333构成为能够沿与导轨330正交的方向(即,与台车331的行驶方向正交的方向)驱动。台车331沿着导轨330移动到作为搬送对象的托盘PL的位置,使用叉部333将作为搬送对象的托盘PL载置于台车331上。之后,台车331沿着导轨330移动到指定的搬送目的地,使用叉部333将作为搬送对象的托盘PL搬送到搬送目的地。
机床400是搬送装置300搬送托盘PL的搬送目的地之一。机床400按照预先设计的加工程序对搬入的托盘PL上安装的工件进行加工。当工件的加工完成时,机床400内的托盘PL被搬送装置300搬送到托盘收纳部200或者作业工位500。
作业工位500是搬送装置300搬送托盘PL的搬送目的地之一。作业人员在作业工位500对搬入的托盘PL进行各种作业。作为一例,作业人员在作业工位500对搬入的托盘PL进行安装作为加工对象的工件的作业、从托盘PL卸下已加工的工件的作业等。当对托盘PL的作业完成时,作业人员进行用于指示作业完成的操作。基于该操作,作业工位500内的托盘PL被搬送装置300搬送到托盘收纳部200或者机床400。
图2是示出托盘搬送系统10的装置结构的一例的图。参照图2来说明托盘搬送系统10的装置结构的一例。
如图2所示,托盘搬送系统10包括控制装置50、远程I/O(Input/Output:输入/输出)单元61~63、搬送装置300、机床400以及作业工位500。
本说明书中所谓的“控制装置50”是指用于控制托盘搬送系统10的装置。控制装置50的装置结构是任意的。控制装置50可以通过单体的控制单元构成,也可以通过多个控制单元构成。在图2的例子中,控制装置50包括控制系统100和控制板150。
控制系统100是用于控制托盘搬送系统10的主计算机。控制板150对用于将加工工序自动化的各种产业用设备进行控制。控制板150包括PLC 151。
控制系统100和PLC 151连接于网络NW1。控制系统100和PLC 151可以通过有线来通信连接,也可以通过无线来通信连接。对于网络NW1,采用EtherNET(注册商标)等。控制系统100经由网络NW1向PLC 151发送控制指令。通过该控制指令来指定作为搬送对象的托盘PL、该托盘PL的搬送目的地、该托盘PL的搬送开始/停止等。
远程I/O单元61~63和PLC 151连接于网络NW2。对于网络NW2,优选采用能够保证数据的到达时间的、进行固定周期通信的现场网络。作为此种进行固定周期通信的现场网络,能够采用EtherCAT(注册商标)、EtherNet/IP(注册商标)、CC-Link(注册商标)、或者CompoNet(注册商标)等。
搬送装置300包括1个以上的伺服驱动器334和1个以上的伺服马达335。在搬送装置300内或者搬送装置300周边设置有远程I/O单元61。远程I/O单元61对搬送装置300内的各种驱动单元(例如,伺服驱动器334)与PLC 151之间的数据交换进行中继。伺服驱动器334按恒定周期经由远程I/O单元61接受来自PLC 151的控制指令,按照该控制指令来对伺服马达335进行驱动控制。作为一例,一个伺服马达335对上述的台车331(参照图1)进行驱动控制,另一个伺服马达335对上述的叉部333(参照图1)进行驱动控制。
伺服驱动器334逐次地从PLC 151接受目标旋转速度(或者目标位置)的输入,将伺服马达335控制成伺服马达335以目标旋转速度旋转。更具体地说,伺服驱动器334根据伺服马达335用的编码器(未图示)的反馈信号来计算伺服马达335的实际旋转速度(或者实际位置),在该实际旋转速度比目标旋转速度小的情况下提高伺服马达335的旋转速度,在该实际旋转速度比目标旋转速度大的情况下降低伺服马达335的旋转速度。如此,伺服驱动器334一边逐次地接受伺服马达335的旋转速度的反馈,一边使伺服马达335的旋转速度接近目标旋转速度。由此,搬送装置300能够将托盘PL移动到任意的搬送目的地。
机床400包括CNC(Computer Numerical Control:计算机数字控制)401、伺服驱动器411以及伺服马达412。在机床400内或者机床400周边设置有远程I/O单元62。远程I/O单元62对机床400内的各种驱动单元(例如,CNC 401)与PLC 151之间的数据交换进行中继。伺服驱动器411与伺服驱动器334同样地,按恒定周期经由远程I/O单元62接受来自PLC 151的控制指令,按照该控制指令来对伺服马达412进行驱动控制。
作业工位500包括用于受理作业人员进行的操作的操作终端550。在作业工位500内或者作业工位500周边设置有远程I/O单元63。远程I/O单元63对操作终端550与PLC 151之间的数据交换进行中继。作业人员对操作终端550进行的操作内容按恒定周期经由远程I/O单元63向PLC 151发送。
控制系统100的控制装置50将工件搬送到托盘收纳部200、搬送装置300、或者机床400等各种各样的场所。此时,根据工件种类的不同,仅对具有特别的权限的人才能够公开加工过程、加工后的形状。
因此,控制装置50根据作为加工对象的工件是否是保密对象,来改变工件的搬送方法。更具体地说,控制装置50基于表示作为加工对象的工件是否是保密对象的信息,来判断该工件是否是保密对象。控制装置50在判断为作为加工对象的工件不是保密对象的情况下,通过通常的搬送方法(第一搬送方法)来搬送安装有该工件的托盘。另一方面,控制装置50在判断为作为加工对象的工件是保密对象的情况下,通过不同于通常的搬送方法的特别的搬送方法(第二搬送方法)来搬送安装有该工件的托盘。如此,通过针对作为保密对象的工件与作为非保密对象的工件而改变搬送方法,能够防止在工件的搬送过程中泄露该工件的秘密信息。
下面,为了便于说明,将作为保密对象的工件称为“保密工件”,将作为非保密对象的工件称为“非保密工件”。另外,将安装有作为保密对象的工件的托盘的搬送称为“保密搬送”,将安装有非保密工件的托盘的搬送称为“非保密搬送”。
此外,与非保密搬送方法(第一搬送方法)不同的保密搬送方法(第二搬送方法)是指,用于实现保密搬送的程序代码与用于实现非保密搬送的程序代码分别记述。这些程序代码可以记述在1个搬送程序内,也可以记述在不同的搬送程序内。只要是在非保密搬送与保密搬送之间内部处理不同,则即使是在如以结果而言工件的搬送路径相同那样的情况下,也不脱离本说明书所述的“保密搬送”和“非保密搬送”的概念。
下面,参照图3~图8来说明非保密搬送方法和保密搬送方法的具体例1~3。
此外,在图3~图8示出了托盘搬送系统10通过2个机床400A、400B构成的例子,但构成托盘搬送系统10的机床的数量并不限定于2个。托盘搬送系统10可以通过1个机床构成,也可以通过3个以上的机床构成。下面,将多个机床400A、400B也统称为机床400。
另外,在图3~图8示出了托盘搬送系统10通过2个作业工位500A、500B构成的例子,但构成托盘搬送系统10的作业工位的数量并不限定于2个。托盘搬送系统10可以通过1个作业工位构成,也可以通过3个以上的作业工位构成。下面,将多个作业工位500A、500B也统称为作业工位500。
(C1.具体例1)
首先,参照图3和图4来说明保密搬送方法和非保密搬送方法的具体例1。图3是示出保密搬送方法的具体例1的图。图4是示出非保密搬送方法的具体例1的图。
在本具体例中,托盘搬送系统10的控制装置50使安装有作为加工对象的工件的托盘的搬送路径在非保密搬送方法与保密搬送方法中发生改变。
管理者针对机床400A、400B,分别预先设定其是否允许作为保密工件的搬送目的地。在图3和图4的例子中,机床400A被设定为保密区,对于机床400A允许保密工件的搬送。
首先,参照图3来说明按照具体例1的保密搬送方法。假设在某一时刻,到了搭载有保密工件W4的托盘PL4的搬送时刻。基于该情况,控制系统100的控制装置50将台车331移动到处于托盘收纳部200的托盘PL4之前。之后,控制装置50驱动台车331的叉部333(参照图1),来将托盘PL4载置于台车331。接着,控制装置50向被设定为保密区的机床400A搬送托盘PL4。
如此,通过保密搬送,搭载有保密工件W4的托盘PL4被搬送到多个机床400A、400B中的预先决定的机床400A。通过由预先决定的机床400A来进行保密工件W4的加工,能够防止将保密工件W4的加工工序泄露给周围的人。
此外,在图3中示出了从托盘收纳部200搬送搭载有保密工件W4的托盘PL4的例子,但托盘PL4的搬送起点也可以是作业工位500A、500B。在该情况下,控制装置50从作业工位500A、500B向机床400A搬送搭载有保密工件W4的托盘PL4。
接着,参照图4来说明按照具体例1的非保密搬送方法。假设在某一时刻,到了搭载有非保密工件W5的托盘PL5的搬送时刻。基于该情况,控制系统100的控制装置50将台车331移动到处于托盘收纳部200的托盘PL5之前。之后,控制装置50驱动台车331的叉部333(参照图1),来将托盘PL5载置于台车331。接着,控制装置50向机床400A、400B中的空闲的机床搬送托盘PL5。在图4的例子中,托盘PL5被搬送到机床400B。
如此,由于非保密工件W5无需保密,因此,控制装置50向多个机床400A、400B中的空闲的机床搬送托盘PL5。典型地,托盘PL5被搬送到没有被设定为保密区的机床400B。
此外,在图4中示出了从托盘收纳部200搬送搭载有非保密工件W5的托盘PL5的例子,但托盘PL5的搬送起点也可以是作业工位500A、500B。在该情况下,控制装置50从作业工位500A、500B向机床400A、400B中的空闲的机床搬送搭载有非保密工件W5的托盘PL5。
(C2.具体例2)
接着,参照图5和图6来说明保密搬送方法和非保密搬送方法的具体例2。图5是示出保密搬送方法的具体例2的图。图6是示出非保密搬送方法的具体例2的图。
本具体例在保密工件的搬送路径与非保密工件的搬送路径的搬送路径不同的方面与上述具体例1相同,但工件的搬送目的地与上述具体例1不同。在本具体例中,保密工件/非保密工件被搬送到托盘收纳部200。
管理者针对托盘收纳部200内的托盘的各个收纳场所,分别在控制系统100中预先设定其是否允许作为保密工件的搬送目的地。在图5和图6的例子中,托盘PL1~PL4的收纳场所被设定为保密区AR1,对于保密区AR1允许保密工件的搬送。
首先,参照图5来说明按照具体例2的保密搬送方法。假设在某一时刻,保密工件W4在机床400A中的加工已完成。基于该情况,控制系统100的控制装置50将台车331移动到机床400A之前。之后,控制装置50驱动台车331的叉部333(参照图1),来将托盘PL4载置于台车331。接着,控制装置50向托盘收纳部200的保密区AR1搬送托盘PL4。
如此,通过保密搬送,搭载有保密工件W4的托盘PL4被搬送到托盘收纳部200内的预先决定的场所。由此,能够防止保密工件W4的加工后的形状泄露。
此外,在图5中示出了从机床400A搬送搭载有保密工件W4的托盘PL4的例子,但托盘PL4的搬送起点也可以是作业工位500A、500B。在该情况下,控制装置50从作业工位500A、500B向托盘收纳部200内的保密区AR1搬送搭载有保密工件W4的托盘PL4。
接着,参照图6来说明按照具体例2的非保密搬送方法。假设在某一时刻,非保密工件W5在机床400B中的加工已完成。基于该情况,控制系统100的控制装置50将台车331移动到机床400B之前。之后,控制装置50驱动台车331的叉部333(参照图1),来将托盘PL5载置于台车331。接着,控制装置50向托盘收纳部200的空闲场所搬送托盘PL5。
如此,由于非保密工件W5无需保密,因此,控制装置50向托盘收纳部200内的任意的空闲场所搬送托盘PL5。典型地,托盘PL5被搬送到没有被设定为保密区AR1的空闲场所。
此外,在图6中示出了从托盘收纳部200搬送搭载有非保密工件W5的托盘PL5的例子,但托盘PL5的搬送起点也可以是作业工位500A、500B。在该情况下,控制装置50从作业工位500A、500B向托盘收纳部200内的保密区AR1以外的空闲场所搬送搭载有非保密工件W5的托盘PL5。
(C3.具体例3)
接着,参照图7和图8来说明保密搬送方法和非保密搬送方法的具体例3。图7是示出保密搬送方法的具体例3的图。图8是示出非保密搬送方法的具体例3的图。
本具体例在根据作为加工对象的工件是否是保密对象来改变搬送路径的方面与上述具体例1、2相同,但工件的搬送目的地与上述具体例1、2不同。在本具体例中,保密工件/非保密工件被搬送到作业工位500。
管理者针对作业工位500A、500B,分别在控制系统100中预先设定其是否允许作为保密工件的搬送目的地。在图7和图8的例子中,作业工位500A被设定为保密区,对于作业工位500A允许保密工件的搬送。
首先,参照图7来说明按照具体例3的保密搬送方法。假设在某一时刻,到了搭载有保密工件W4的托盘PL4的搬送时刻。基于该情况,控制系统100的控制装置50将台车331移动到处于托盘收纳部200的托盘PL4之前。之后,控制装置50驱动台车331的叉部333(参照图1),来将托盘PL4载置于台车331。接着,控制装置50向被设定为保密区的作业工位500A搬送托盘PL4。
如此,通过保密搬送,搭载有保密工件W4的托盘PL4被搬送到多个作业工位500A、500B中的预先决定的作业工位500A。由此,能够防止保密工件W4的形状泄露。
此外,在图7中示出了从托盘收纳部200搬送搭载有保密工件W4的托盘PL4的例子,但托盘PL4的搬送起点也可以是机床400A、400B。在该情况下,控制装置50从机床400A、400B向作业工位500A搬送搭载有保密工件W4的托盘PL4。
接着,参照图8来说明按照具体例3的非保密搬送方法。假设在某一时刻,到了搭载有非保密工件W5的托盘PL5的搬送时刻。基于该情况,控制系统100的控制装置50将台车331移动到处于托盘收纳部200的托盘PL5之前。之后,控制装置50驱动台车331的叉部333(参照图1),来将托盘PL5载置于台车331。接着,控制装置50向作业工位500A、500B中的空闲的机床搬送托盘PL5。在图8的例子中,托盘PL5被搬送到作业工位500B。
如此,由于非保密工件W5无需保密,因此,控制装置50向多个作业工位500A、500B中的空闲的作业工位搬送搭载有非保密工件W5的托盘PL5。典型地,托盘PL5被搬送到没有被设定为保密工件的搬送目的地的作业工位500B。
此外,在图8中示出了从托盘收纳部200搬送搭载有非保密工件W5的托盘PL5的例子,但托盘PL5的搬送起点也可以是机床400A、400B。在该情况下,控制装置50从机床400A、400B向作业工位500A、500B中的空闲的机床搬送搭载有非保密工件W5的托盘PL5。
接着,参照图9和图10来说明保密搬送方法的变形例。在上述中,通过在保密搬送方法与非保密搬送方法之间改变搬送路径,实现了保密工件的保密化。与此相对,在本变形例中,托盘搬送系统10在预先决定的时间段禁止搬送保密工件,由此实现保密工件的保密化。
禁止搬送保密工件的时间段是由管理者等来预先设定的。下面,将禁止搬送保密工件的时间段也称为“搬送禁止时间段”。与此相对,将允许搬送保密工件的时间段也称为“搬送允许时间段”。
图9是示出搬送禁止时间段的保密搬送方法的图。在图9的例子中,核心时间(例如,8时~18时)被设定为搬送禁止时间段。
如图9所示,假设在搬送禁止时间段的某一时刻,到了搭载有保密工件W4的托盘PL4的搬送时刻。在当前时刻包含于搬送禁止时间段的情况下,托盘搬送系统10的控制装置50禁止搬送搭载有保密工件W4的托盘PL4。另一方面,对于搭载非保密工件的托盘,控制装置50无论当前时刻是否包含于搬送禁止时间段,都执行工件的搬送。
如此,在搬送禁止时间段禁止搬送搭载保密工件W4的托盘PL4,由此例如能够降低在作业人员多的时间段(例如,核心时间)向不具有特别的权限的作业人员泄露与保密工件W4有关的信息的风险。
图10是示出搬送允许时间段的保密搬送方法的图。在图10的例子中,夜间的时间段(例如,18时~8时)被设定为搬送允许时间段。
如图10所示,假设在搬送允许时间段的某一时刻,到了搭载有非保密工件W5的托盘PL5的搬送时刻。在当前时刻包含于搬送允许时间段的情况下,托盘搬送系统10的控制装置50允许搬送托盘PL5,向所指定的搬送目的地搬送托盘PL5。此时,优选为,控制装置50执行通过上述具体例1~4说明的保密搬送,将搬送目的地限制于预先设定的保密区。在图10的例子中,保密工件W4被搬送到被设定为保密区的机床400A或者作业工位500A。
控制系统100受理用于实现保密搬送的各种设定(下面,也称为“保密设定”。)。下面,参照图11来说明用于受理与保密搬送有关的各种设定的保密设定画面的一例。
图11是示出保密设定画面的一例的图。在图11中,作为保密设定画面的一例,示出了保密设定画面130。保密设定画面130具有用于受理用户设定的设定栏131~135。
设定栏131按工件的种类来受理保密对象/非保密对象的选择。作为一例,通过下拉菜单选择了“是”的工件被设定为保密对象。另一方面,通过下拉菜单选择了“否”的工件被设定为非保密对象。
设定栏132针对多个机床400分别受理保密区/非保密区的选择。作为一例,通过下拉菜单选择了“是”的机床被设定为保密区。另一方面,通过下拉菜单选择了“否”的机床被设定为非保密区。
设定栏133针对托盘收纳部200内的托盘的各个收纳场所分别受理保密区/非保密区的选择。作为一例,通过下拉菜单选择了“是”的收纳场所被设定为保密区。另一方面,通过下拉菜单选择了“否”的收纳场所被设定为非保密区。
设定栏134针对多个作业工位500分别受理保密区/非保密区的选择。作为一例,通过下拉菜单选择了“是”的作业工位被设定为保密区。另一方面,通过下拉菜单选择了“否”的作业工位被设定为非保密区。
设定栏135用于受理保密工件的搬送禁止时间段的设定。搬送禁止时间段可以按星期来设定,也可以以日为单位来设定。在设定栏135为空栏的情况下,搬送禁止时间段被视为未设定。除被设定的搬送禁止时间段以外的时间段被视为搬送允许时间段。
此外,在图11中示出了在设定栏135中设定搬送禁止时间段的例子,但是作为其代替,也可以在设定栏135中设定搬送允许时间段。在该情况下,除搬送允许时间段以外的时间段被视为搬送禁止时间段。
在保密设定画面130的确定按钮136被按下的情况下,控制系统100将在设定栏131~135中设定的各种信息作为后述的保密设定信息126(参照图13)保存于存储装置120(参照图13)。另一方面,在保密设定画面130的取消按钮137被按下的情况下,控制系统100不保存在设定栏131~135设定的各种信息,并关闭保密设定画面130。控制系统100中保存的保密设定信息126被传送到PLC 151。
此外,在图11的例子中,在由管理者在保密设定画面130中设定保密设定信息126的前提下进行了说明,但保密设定信息126的一部分或者全部可以自动设定。例如,托盘搬送系统10可以基于规定的图像处理来自动确定作为搬送对象的各工件是否是保密对象。例如,托盘搬送系统10对通过摄像机(未图示)拍摄作为搬送对象的工件而得到的摄影图像执行预先决定的图像处理,由此来判断作为搬送对象的工件是否是保密对象。在使用摄影图像来判断作为搬送对象的工件是否是保密对象的方法中,能够采用各种算法。
作为一例,预先准备表示作为保密对象的工件形状的图像(下面,也称为“基准图像”。)。该基准图像可以是二维图像,也可以是三维图像。托盘搬送系统10将拍摄作为搬送对象的工件而得到的摄影图像与基准图像进行比较,计算基准图像与摄影图像的相似度。在该相似度的计算方法中能够采用任意的算法。能够采用SSD(Sum of SquaredDifference:平方差之和)、SAD(Sum of Absolute Difference:绝对差之和)、NCC(Normalized Cross-Correlation:归一化互相关)、或者ZNCC(Zero-mean NormalizedCross-Correlation:零均值归一化互相关)等来作为该相似度的计算方法。
托盘搬送系统10在计算出的相似度超过了规定阈值的情况下,判断为作为搬送对象的工件为保密对象。另一方面,托盘搬送系统10在计算出的相似度为规定阈值以下的情况下,判断为作为搬送对象的工件为非保密对象。
参照图12来说明构成托盘搬送系统10的各种设备间的数据的共享方法。图12是概要性地示出构成托盘搬送系统10的各种设备的协作关系的概念图。
如上所述,控制系统100和PLC 151连接于EtherNET等网络NW1。远程I/O单元61~63和PLC 151连接于现场网络即网络NW2。
在网络NW2中传输帧72。帧72按预先决定的控制周期在网络NW2上环行。远程I/O单元61~63与PLC 151借助帧72来共享各种数据。
帧72例如具有PLC 151用数据区域71A、与远程I/O单元61连接的搬送装置300用数据区域71B、与远程I/O单元62连接的机床400用数据区域71C以及与远程I/O单元63连接的操作终端550用数据区域71D。
帧72的数据区域71A是供PLC 151写入各种数据的区域。向数据区域71A写入托盘PL的搬送指示等。在该搬送指示中包含托盘PL的搬送目的地。该搬送目的地例如通过表示托盘收纳部200内的保存场所的识别编号(例如,表示保存场所的ID(Identification:身份标识))、用于识别机床400的识别编号(例如,机床的ID)等来表示。由PLC 151写入到数据区域71A的各种数据能够被连接于网络NW2的各种设备参照。
帧72的数据区域71B是供远程I/O单元61写入与搬送装置300有关的各种数据的区域。写入到数据区域71B的各种数据被连接于网络NW2的各种设备参照。
帧72的数据区域71C是供远程I/O单元62写入与机床400有关的各种数据的区域。写入到数据区域71C的各种数据被连接于网络NW2的各种设备参照。
帧72的数据区域71D例如是供远程I/O单元63写入对操作终端550的操作内容的区域。作为一例,向帧72的数据区域71D写入对于从作业工位500搬送托盘的允许或者拒绝的选择结果等。
参照图13来说明控制系统100的硬件结构。图13是示出控制系统100的硬件结构的一例的示意图。
控制系统100包括处理器101、ROM(Read Only Memory:只读存储器)102、RAM(Random Access Memory:随机存取存储器)103、通信接口104、显示接口105、输入接口107以及存储装置120。这些组件与总线110连接。
处理器101例如由至少一个集成电路构成。集成电路例如能够由至少一个CPU(Central Processing Unit:中央处理单元)、至少一个GPU(Graphics Processing Unit:图形处理单元)、至少一个ASIC(Application Specific Integrated Circuit:专用集成电路)、至少一个FPGA(Field Programmable Gate Array:现场可编程门阵列)、或者它们的组合等构成。
处理器101执行托盘搬送程序122、操作系统等各种程序,由此对控制系统100的动作进行控制。处理器101基于受理到托盘搬送程序122的执行命令,来从存储装置120或者ROM 102向RAM 103读出托盘搬送程序122。RAM 103作为工作存储器发挥功能,暂时保存托盘搬送程序122的执行所需的各种数据。
在通信接口104上连接有LAN(Local Area Network:局域网)、天线等。控制系统100经由通信接口104连接于网络NW1。由此,控制系统100与连接于网络NW1的外部设备交换数据。该外部设备例如包括控制板150、服务器(未图示)等。控制系统100可以构成为能够从该外部设备下载托盘搬送程序122。
在显示接口105上连接有显示器106。显示接口105按照来自处理器101等的指令对显示器106送出用于显示图像的图像信号。显示器106例如为液晶显示器、有机EL(ElectroLuminescence:电致发光)显示器、或者其它的显示设备。此外,显示器106可以与控制系统100一体构成,也可以与控制系统100分别构成。在显示器106上例如显示上述的保密设定画面130(参照图11)。
在输入接口107上连接有输入设备108。输入设备108例如是鼠标、键盘、触摸面板、或者能够受理用户的操作的其它装置。此外,输入设备108可以与控制系统100一体构成,也可以与控制系统100分别构成。
存储装置120例如为硬盘、闪存等存储介质。存储装置120保存托盘搬送程序122、调度表信息124以及保密设定信息126等。在调度表信息124中,规定有托盘(或者工件)的搬送顺序、托盘(或者工件)的加工优先度等。保密设定信息126包含在上述的保密设定画面130(参照图11)中设定的各种信息。存储于存储装置120的各种数据的保存场所并不限定于存储装置120,也可以保存于处理器101的存储区域(例如,高速缓冲存储器等)、ROM 102、RAM 103、外部设备(例如,服务器)等。
托盘搬送程序122可以不作为单体的程序提供,而是嵌入为任意的程序的一部分来提供。在该情况下,基于托盘搬送程序122的搬送控制处理是与任意的程序协作来实现的。即使是此种的不包含一部分模块的程序,也不脱离根据本实施方式的托盘搬送程序122的宗旨。并且,通过托盘搬送程序122提供的功能的一部分或者全部也可以通过专用的硬件来实现。并且,也可以通过由至少一个服务器执行托盘搬送程序122的处理的一部分的所谓云服务那样的方式,来构成控制系统100。
参照图14来说明PLC 151的硬件结构的一例。图14是示出PLC 151的主要的硬件结构的框图。
PLC 151包括处理器161、ROM(Read Only Memory:只读存储器)162、RAM(RandomAccess Memory:随机存取存储器)163、通信接口164、165以及存储装置170。
处理器161由至少一个集成电路构成。集成电路例如由至少一个CPU、至少一个MPU(Micro Processing Unit:微处理单元)、至少一个ASIC、至少一个FPGA、或者它们的组合等构成。
处理器161执行控制程序172等各种程序,由此控制搬送装置300、机床400的动作。处理器161基于受理到控制程序172的执行命令,来从存储装置170向ROM 162读出控制程序172。RAM 163作为工作存储器发挥功能,暂时保存控制程序172的执行所需的各种数据。
在通信接口164上连接有LAN、天线等。PLC 151经由通信接口164连接于网络NW1。由此,PLC 151与连接于网络NW1的外部设备交换数据。该外部设备例如包括控制系统100、服务器(未图示)等。
通信接口165是用于与现场网络即网络NW2连接的接口。PLC 151经由通信接口165与连接于网络NW2的外部设备交换数据。该外部设备例如包括远程I/O单元61~63等。
存储装置170例如为硬盘、闪存等存储介质。存储装置170保存控制程序172和保密设定信息176等。保密设定信息176相当于从上述的控制系统100接收到的保密设定信息126。存储于存储装置170的各种数据的保存场所并不限定于存储装置170,也可以保存于处理器161的存储区域(例如,高速缓冲区域等)、ROM 162、RAM 163、外部设备(例如,服务器)等。
控制程序172可以不作为单体的程序提供,而是嵌入为任意的程序的一部分来提供。在该情况下,根据本实施方式的控制处理是与任意的程序协作来实现的。即使是此种的不包含一部分模块的程序,也不脱离根据本实施方式的控制程序172的宗旨。并且,通过控制程序172提供的功能的一部分或者全部也可以通过专用的硬件来实现。并且,也可以通过由至少一个服务器执行控制程序172的处理的一部分的所谓云服务那样的方式,来构成PLC151。
参照图15来说明机床400的硬件结构的一例。图15是示出机床400的主要的硬件结构的框图。
机床400包括CNC 401、ROM 402、RAM 403、现场总线控制器404、显示接口405、输入接口409、伺服驱动器411A~411D、伺服马达412A~412D、编码器413A~413D、滚珠丝杠414A、414B以及用于安装工具的主轴415。这些设备经由总线(未图示)连接。
CNC 401由至少一个集成电路构成。集成电路例如由至少一个CPU、至少一个MPU、至少一个ASIC、至少一个FPGA、或者它们的组合等构成。
CNC 401执行加工程序422等各种程序,由此控制机床400的动作。CNC 401基于受理到加工程序422的执行命令,来从存储装置420向ROM 402读出加工程序422。RAM 403作为工作存储器发挥功能,暂时保存加工程序422的执行所需的各种数据。
现场总线控制器404是用于经由远程I/O单元62实现与PLC 151的通信的接口。CNC401经由现场总线控制器404来与PLC 151之间交换数据。
显示接口405与显示器430等显示设备连接,按照来自CNC 401等的指令对显示器430送出用于显示图像的图像信号。显示器430例如为液晶显示器、有机EL显示器、或者其它的显示设备。
输入接口409能够与输入设备431连接。输入设备431例如是鼠标、键盘、触摸面板、或者能够受理用户操作的其它输入设备。
CNC 401按照加工程序422来控制伺服驱动器411A。伺服驱动器411A逐次地从CNC401接受目标转速(或者目标位置)的输入,并将伺服马达412A控制成伺服马达412A以目标转速旋转,来沿X轴方向驱动工件设置台(未图示)。更具体地说,伺服驱动器411A根据编码器413A的反馈信号来计算伺服马达412A的实际转速(或者实际位置),在该实际转速比目标转速小的情况下提高伺服马达412A的转速,在该实际转速比目标转速大的情况下降低伺服马达412A的转速。如此,伺服驱动器411A一边逐次地接受伺服马达412A的转速的反馈,一边使伺服马达412A的转速接近目标转速。伺服驱动器411A使与滚珠丝杠414A连接的工件设置台沿X轴方向移动,来将工件设置台移动到X轴方向的任意的位置。
通过同样的马达控制,伺服驱动器411B使与滚珠丝杠414B连接的工件设置台按照来自CNC 401的控制指令沿Y轴方向移动,来将工件设置台移动到Y轴方向的任意的位置。通过进行同样的马达控制,伺服驱动器411C按照来自CNC 401的控制指令,使主轴415沿Z轴方向移动,来将主轴415移动到Z轴方向的任意的位置。通过进行同样的马达控制,伺服驱动器411D按照来自CNC 401的控制指令,控制主轴415的旋转速度。
存储装置420例如为硬盘、闪存等存储介质。存储装置420保存加工程序422等。加工程序422的保存场所并不限定于存储装置420,也可以保存于CNC 401的存储区域(例如,高速缓冲区域等)、ROM 402、RAM 403、外部设备(例如,服务器)等。
参照图16来说明设置于作业工位500的操作终端550的硬件结构。图16是示出操作终端550的硬件结构的一例的示意图。
操作终端550包括处理器501、ROM 502、RAM 503、通信接口504、显示接口505、输入接口507以及存储装置520。这些组件与总线510连接。
处理器501例如由至少一个集成电路构成。集成电路例如能够由至少一个CPU、至少一个GPU、至少一个ASIC、至少一个FPGA、或者它们的组合等构成。
处理器501执行控制程序522、操作系统等各种程序,由此对操作终端550的动作进行控制。处理器501基于受理到控制程序522的执行命令,来从存储装置520或者ROM 502向RAM 503读出控制程序522。RAM 503作为工作存储器发挥功能,暂时保存控制程序522的执行所需的各种数据。
在通信接口504上连接有LAN、天线等。操作终端550经由通信接口504连接于网络NW1、NW2。由此,操作终端550与连接于网络NW1、NW2的外部设备交换数据。该外部设备例如包括控制板150、服务器(未图示)等。操作终端550可以构成为能够从该外部设备下载控制程序522。
在显示接口505上连接有显示器506。显示接口505按照来自处理器501等的指令对显示器506送出用于显示图像的图像信号。在显示器506中显示用于受理允许或者拒绝强制搬送处于作业工位500的作业中的托盘的选择画面等。显示器506例如为液晶显示器、有机EL显示器、或者其它的显示设备。此外,显示器506可以与操作终端550一体构成,也可以与操作终端550分别构成。
在输入接口507上连接有输入设备508。输入设备508例如是鼠标、键盘、触摸面板、或者能够受理用户的操作的其它装置。此外,输入设备508可以与操作终端550一体构成,也可以与操作终端550分别构成。
存储装置520例如为硬盘、闪存等存储介质。存储装置520保存控制程序522、作业人员信息524等。在作业人员信息524中,针对每个作业人员ID规定赋予各作业人员的权限。控制程序522、作业人员信息524的保存场所并不限定于存储装置520,也可以保存于处理器501的存储区域(例如,高速缓冲存储器等)、ROM 502、RAM 503、外部设备(例如,服务器)等。
控制程序522可以不作为单体的程序提供,而是嵌入为任意的程序的一部分来提供。在该情况下,基于控制程序522的控制处理是与任意的程序协作来实现的。即使是此种的不包含一部分模块的程序,也不脱离根据本实施方式的控制程序522的宗旨。并且,通过控制程序522提供的功能的一部分或者全部也可以通过专用的硬件来实现。并且,也可以通过由至少一个服务器执行控制程序522的处理的一部分的所谓云服务那样的方式,来构成操作终端550。
接着,参照图16来说明操作终端550的显示器506中的显示画面。
作业人员在作业工位500进行对搬入的托盘安装工件的作业、从搬入的托盘卸下已加工的工件的作业。在该作业过程中,在显示器506中显示用于辅助作业人员的信息。作为一例,显示作业工序、作业方法以及作业上的注意点等来作为作业人员的辅助信息。作业人员一边确认所显示的辅助信息一边进行作业,由此能够高效地进行作业。
此时,操作终端550的处理器501作为显示控制部发挥功能,用于控制显示器506的显示。更具体地说,在对作业工位500内的作业人员赋予了规定的第一权限时,处理器501在显示器506中显示与作为保密对象的工件有关的信息。另一方面,在对作业工位500内的作业人员赋予了比第一权限低的第二权限时,处理器501限制与保密工件有关的一部分信息的显示。作为被限制的显示信息的一例,能够例举保密工件的加工形状、保密工件的加工工序等。对于被赋予了第二权限的作业人员,限制与保密工件有关的信息的公开,由此防止工件的秘密信息的泄露。
对作业人员赋予的权限的种类能够通过各种方法来确定。作为一例,各作业人员的权限由管理者预先登记。该登记内容作为作业人员信息524被保存于存储装置520。在作业人员信息524中,针对每个作业人员ID来规定赋予各作业人员的权限。作业人员在作业开始时,使用输入设备508输入自身的作业人员ID,来登录操作终端550。基于该情况,操作终端550的处理器501参照作业人员信息524,来确定与所输入的作业人员ID(登录信息)相关联的权限的种类。
参照图17来说明PLC 151的处理器161的控制流程。图17是表示处理器161所执行的搬送处理的一部分的流程图。
在步骤S110中,处理器161判断是否受理到工件的搬送指令。作为一例,基于在搬送程序上执行了表示工件的搬送的命令代码,来发出该搬送指令。在该命令代码中例如规定有作为搬送对象的工件的识别信息、该工件的搬送目的地等。处理器161在判断为受理到工件的搬送指令的情况下(步骤S110中为“是”),将控制切换到步骤S170。否则(步骤S110中为“否”),处理器161将控制切换到步骤S120。
在步骤S120中,处理器161基于上述的保密设定信息176(参照图14),来判断作为搬送对象的工件是否是保密对象。处理器161在判断为作为搬送对象的工件是保密对象的情况下(步骤S120中为“是”),将控制切换到步骤S130。否则(步骤S120中为“否”),处理器161将控制切换到步骤S122。
在步骤S122中,处理器161向在搬送程序中所指定的场所搬送非保密工件。
在步骤S130中,处理器161根据上述的保密设定信息176(参照图14)来确定搬送禁止时间段,判断当前时刻是否包含于该搬送禁止时间段。处理器161在判断为当前时刻包含于搬送禁止时间段的情况下(步骤S130中为“是”),将控制切换到步骤S132。否则(步骤S130中为“否”),处理器161将控制切换到步骤S140。
在步骤S132中,处理器161禁止搬送保密工件。典型地,处理器161在步骤S132中不执行任何操作,使处理进入步骤S170。或者,处理器161在输出规定的警告的基础上,使处理进入步骤S170。
在步骤S140中,处理器161判断保密工件的搬送目的地是否为机床400。例如基于在步骤S120中接受到的搬送指令,来判断搬送目的地是否为机床400。处理器161在判断为保密工件的搬送目的地为机床400的情况下(步骤S140中为“是”),将控制切换到步骤S142。否则(步骤S140中为“否”),处理器161将控制切换到步骤S150。
在步骤S142中,处理器161根据上述的保密设定信息176(参照图14)来确定被设定为保密区的机床400,向确定出的机床400中的空闲的机床搬送保密工件。
在步骤S150中,处理器161判断保密工件的搬送目的地是否为托盘收纳部200。例如基于在步骤S120中接受到的搬送指令,来判断搬送目的地是否为托盘收纳部200。处理器161在判断为保密工件的搬送目的地为托盘收纳部200的情况下(步骤S150中为“是”),将控制切换到步骤S152。否则(步骤S150中为“否”),处理器161将控制切换到步骤S160。
在步骤S152中,处理器161根据上述的保密设定信息176(参照图14)来确定托盘收纳部200内的被设定为保密区的收纳场所,向确定出的收纳场所内的任意的空闲场所搬送保密工件。
在步骤S160中,处理器161判断保密工件的搬送目的地是否为作业工位500。例如基于在步骤S120中接受到的搬送指令,来判断搬送目的地是否为作业工位500。处理器161在判断为保密工件的搬送目的地为作业工位500的情况下(步骤S160中为“是”),将控制切换到步骤S162。否则(步骤S160中为“否”),处理器161将控制切换到步骤S170。
在步骤S162中,处理器161根据上述的保密设定信息176(参照图14)来确定被设定为保密区的作业工位500,向确定出的作业工位500中的空闲的作业工位搬送保密工件。
在步骤S164中,处理器161向作业工位500内的操作终端550发送指示,以限制与保密工件有关的信息的显示。
在步骤S170中,处理器161判断是否结束搬送处理。作为一例,在搬送程序上执行了搬送的结束命令的情况下、发生了某种错误的情况下,发出搬送处理的结束命令。处理器161在判断为结束搬送处理的情况下(步骤S170中为“是”),结束图17所示的处理。否则(步骤S170中为“否”),处理器161将控制返回到步骤S110。
如上所述,托盘搬送系统10在作为搬送对象的工件为保密对象的情况下,通过特别的搬送方法(即,保密搬送)来搬送该保密工件。通过保密搬送,保密工件被搬送到预先决定的保密区。另一方面,托盘搬送系统10在作为搬送对象的工件为非保密对象的情况下,通过通常的搬送方法(即,非保密搬送)来搬送该非保密工件。
如此,托盘搬送系统10根据作为搬送对象的工件是否是保密对象来改变工件的搬送方法。由此,能够防止在工件的搬送过程中泄露该工件的秘密信息。
应当认为,本次公开的实施方式在全部方面均为例示而并非限制性的。本发明的范围通过权利要求书示出而非通过上述说明示出,意图包含与权利要求书等同的含义和范围内的全部变更。
附图标记说明
10:托盘搬送系统;50:控制装置;61、62、63:远程I/O单元;71A、71B、71C、71D:数据区域;72:帧;100:控制系统;101、161、501:处理器;102、162、402、502:ROM;103、163、403、503:RAM;104、164、165、504:通信接口;105、405、505:显示接口;106、430、506:显示器;107、409、507:输入接口;108、431、508:输入设备;110、510:总线;120、170、420、520:存储装置;122:托盘搬送程序;124:调度表信息;126、176:保密设定信息;130:保密设定画面;131、132、133、134、135:设定栏;136:确定按钮;137:取消按钮;150:控制板;151:PLC;172、522:控制程序;200:托盘收纳部;300:搬送装置;330:导轨;331:台车;333:叉部;334、411、411A、411B、411C、411D:伺服驱动器;335、412、412A、412B、412C、412D:伺服马达;400、400A、400B:机床;401:CNC;404:现场总线控制器;413A、413B、413C、413D:编码器;414A、414B:滚珠丝杠;415:主轴;422:加工程序;500A、500B:作业工位;524:作业人员信息;550:操作终端。
- 托盘搬送系统、托盘搬送方法以及托盘搬送程序
- 托盘搬送系统、托盘搬送方法以及托盘搬送程序