多信息融合特殊作业现场动态隐患识别和风险评估系统和方法
文献发布时间:2023-06-19 12:25:57
技术领域
本发明属于设备检修作业监测监控技术领域,特别涉及一种多信息融合特殊 作业现场动态隐患识别和风险评估系统和方法。
背景技术
化学品生产单位特殊作业诱发的安全生产事故层出不穷,特殊作业人员受限 空间窒息、不规范行为与穿戴、装备失效状态、物料泄漏引发燃爆等是造成特殊 作业安全事故和作业人员重伤、死亡,造成重大生命财产损失的主要原因。化工 园区特殊作业是风险防控和整治的重点,目前各化工企业特殊作业过程中安全管 控存在缺乏科学整体规划和整体风险评估、信息化水平不高、安全信息孤立、安 全要素不全、应急预警不及时,导致特殊作业过程中存在的安全隐患管理不足、 危险状态监测缺失、风险预警速度滞后、安全事故应急处置效率和效果不佳等问 题。
当前特殊作业的安全监管主要由企业按照企业自行制定的特殊作业安全管理 制度实行人工管理,缺乏信息化、定量化的检测识别技术,隐患识别力不足,预 警能力缺失,风险隐患不能及时发现,无法适应国家对生产安全精准管理的要求。 智能技术的发展可以为特殊作业安全隐患识别和风险管控提供技术支撑。在日本, 人工智能技术与工业的结合已经日趋成熟,利用智能视觉自动检测代替肉眼检测 作业,实现制造和检测过程的智能化与无人化;人工智能技术大幅改善工业机器 人的作业性能,提升制造流程的自动化与无人化水平,并且可以提前检知工业机 器人的异常状态,从而有效避免机器故障带来的损失;西门子公司提出,智能技 术可以实现数据的可视化分析,通过基于数据驱动的智能模型获得设备运行状态、 能耗情况、生产力状况等等情况,实现机器自我诊断、预测性维护、优化管理运 营等。目前智能技术在工业领域的应用重点仍然在提高生产性能方面,主要应用于传统离散制造业当中,在特殊作业过程中的智能检测识别技术仍然处于待发展 阶段。特殊作业过程中物料安全状态识别、人员安全行为规范穿戴识别监管、设 备状态识别和预警技术尚没有成熟技术和应用案例。
发明内容
为解决现有技术中存在的问题,提高特殊作业监测监护的准确性、高效性和 自动化水平,本发明提出一种多信息融合特殊作业现场动态隐患识别和风险评估 系统和方法,系统充分利用人工嗅觉、目标检测、行为识别和多信息融合技术, 针对典型特殊作业环境介质、作业人员行为、作业人员装备、作业现场物料等的 安全状态进行监测与风险评估,解决目前特殊作业中人工监护、安全监测信息缺 乏、识别要素不全、检测准确度低、预警滞后等问题。
为达到上述目的,本发明采用的技术手段是:
一种多信息融合特殊作业现场动态隐患识别和风险评估系统,包括:
特殊作业人工嗅觉检测单元,用于获取特殊作业现场气体产生响应信号,输 入计算控制中心,
特殊作业视觉检测单元,用于采集特殊作业现场的图像信息和视频信息,输 入计算控制中心;
计算控制中心,用于接收所述特殊作业人工嗅觉检测单元的特殊作业现场气 体产生响应信号和所述特殊作业视觉检测单元的图像信息和视频信息,并汇总提 供给多信息融合安全隐患识别单元及多信息融合风险评估与智能预警单元;
多信息融合安全隐患识别单元,用于根据收集的人工嗅觉的响应信号和视觉 检测的图像视频,进行场景匹配,并根据多信息融合算法进行识别,标记隐患位 置;
多信息融合风险评估与智能预警单元,用于根据获得的特殊作业过程中人工 嗅觉和摄像头信息,根据风险定级算法将作业过程中的危险程度进行实时风险评 定。
作为本发明的进一步改进,所述特殊作业人工嗅觉检测单元包括人工嗅觉模 块、盲源分离模块和模式识别模块,人工嗅觉模块用于采集特殊作业现场的气体 信息得到人工嗅觉响应信号,盲源分离模块将气体人工嗅觉响应的真实浓度信号 与噪声信号的分离,经过模式识别模块处理进行特殊作业现场痕量气体组分种类 和浓度的定性定量分析。
作为本发明的进一步改进,所述特殊作业人工嗅觉检测单元还包括滤波器、 信号转换模块、盲源分离模块和模式识别模块;
所述人工嗅觉模块采集现场气体信号,产生气体浓度信号响应矩阵,经过滤 波器处理,将时间序列的响应信号经过信号转换模块进行信号转换,输入盲源分 离模块得到真实浓度信号与噪声信号分离模块,真实浓度信号经过模式识别模块 处理实现痕量气体的准确识别。
作为本发明的进一步改进,所述特殊作业视觉检测单元包括摄像头模块、图 像目标检测模块与视频行为识别方法;摄像头模块采集特殊作业现场的图像信息 和视频信息,图像目标检测模块和视频行为识别方法对图像和视频处理后标记目 标特征,对特殊作业现场的安全隐患识别和操作人员作业规范识别。
作为本发明的进一步改进,所述图像目标检测模块还用于根据摄像头模块获 取特殊作业现场的红外图像与可见光图像,红外图像与可见光图像分别经过图像 增强预处理,进行双视融合,增强图像细节,融合后的图像输入计算控制中心中, 经过深度学习目标检测模型分析,实现特殊作业现场安全隐患目标的检测与标记。
作为本发明的进一步改进,所述视频行为识别方法用于根据摄像头模块获取 可见光画面与红外画面,基于红外画面信息获取特殊作业人员的人体骨架数据, 之后与可见光视频进行融合,形成带人体骨架信息的视频序列,融合后的视频序 列输入计算控制中心中,经过深度学习行为识别模型分析,实现特殊作业现场作 业人员的行为识别与隐患标记。
作为本发明的进一步改进,所述多信息融合安全隐患识别单元包括场景匹配 分析模块、多信息融合隐患识别分析模块和安全隐患识别与隐患标记模块,场景 匹配分析模块与多信息融合隐患识别分析模块根据计算控制中心提供汇总的人工 嗅觉数据与视觉检测数据,实现作业现场的定性识别和当前作业场景下的安全隐 患识别与隐患标记,给出作业条件整改方案,并将检测识别到的安全隐患数据发 送到计算控制中心。
作为本发明的进一步改进,所述多信息融合风险评估与智能预警单元包括多 信息融合风险评级分析模块、风险程度实时量化模块、智能预警模块和特殊作业 智能建议模块;
多信息融合风险评级分析模块根据计算控制中心提供汇总人工嗅觉数据、视 觉检测数据和多信息融合安全隐患识别单元数据,将作业过程中的风险程度实时 量化,智能预警模块在作业风险高于阈值时发出智能预警,特殊作业智能建议模 块给出特殊作业智能建议。
基于多信息融合特殊作业现场动态隐患识别和风险评估系统的方法,包括以 下步骤:
获取特殊作业现场气体产生响应信号;
采集特殊作业现场的图像信息和视频信息;
根据收集的人工嗅觉的响应信号和视觉检测的图像视频,进行场景匹配,并 根据多信息融合算法进行识别,标记隐患位置;
根据获得的特殊作业过程中人工嗅觉和摄像头信息,根据风险定级算法将作 业过程中的危险程度进行实时风险评定。
作为本发明的进一步改进,所述实时风险评定具体步骤为:
计算局部风险评估因子R
由风险基准因子R
R
R
O——超出标准因子,由多信息融合终端测定;
I——增长趋势因子,由多信息融合终端测定;
W
局部风险评估因子根据量化值界定为三级:0 计算全要素风险评价因子R 由前三个最大的局部风险评估因子R
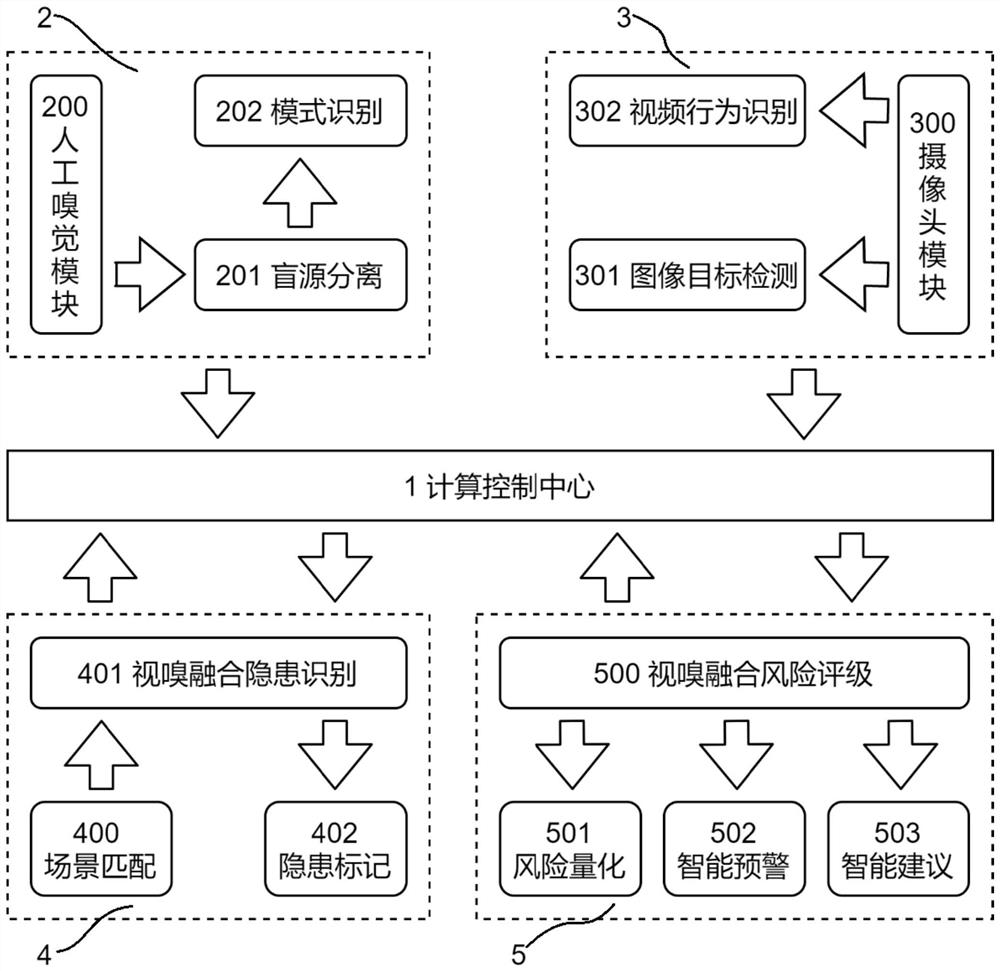
R W 全要素风险评价因子根据量化值界定为三级:0 与现有技术相比,本发明的优点为: 本发明多信息融合特殊作业现场动态隐患识别和风险评估系统,充分利用人 工嗅觉、目标检测、行为识别和多信息融合技术,针对典型特殊作业环境介质、 作业人员行为、作业人员装备、作业现场物料等的安全状态进行监测与风险评估, 解决目前特殊作业中人工监护、安全监测信息缺乏、识别要素不全、检测准确度 低、预警滞后等问题。 进一步,特殊作业人工嗅觉准确检测方法,依赖于人工嗅觉模块和盲源分离 痕量气体准确检测算法:人工嗅觉模块基于传感器阵列,采集特殊作业环境中的 气体数据,产生的人工嗅觉响应信号经过信号处理、信号转换,输入图谱盲源分 离模型,分离噪声信号和真实浓度信号,真实浓度信号经过模式识别模块分析, 实现现场气体组分种类和浓度的定性定量分析。 进一步,一种红外/可见光图像双视融合的安全隐患识别方法,包含特殊作业 目标检测与安全行为识别,依赖于摄像头模块和双视融合算法:摄像头模块获取 现场红外图像和可见光图像,图像经过预处理,进行红外/可见光双视融合,融合 后的图像具有更强的细节,经过目标检测算法、行为识别算法分析,识别特殊作 业现场中的安全隐患。图像目标检测模块基于红外图像与可见光图像的双视融合, 摄像头阵列模块采集到特殊作业环境中的图像信息,经过一系列图像预处理、图 像融合与目标检测等方法的处理,检测并识别现场视频画面中是否出现目标安全 隐患;视频行为识别方法基于人体骨架与深度学习模型,摄像头阵列模块采集特 殊作业过程中操作人员的视频数据,提取骨架信息,后经过深度学习模型处理, 检测并识别作业过程中作业人员是否出现不规范操作。实现作业现场操作人员准 入识别、身份识别、安全防护用具穿戴规范识别和操作行为规范识别等。 进一步,一种多信息融合的作业现场全要素安全隐患识别模型,包括环境监 测、安全装置监测和行为监测。环境监测包括作业现场危险气体浓度和氧气浓度 的实时监测,作业现场危险物料如动火作业现场易燃易爆堆放物料等实时监测; 安全装置监测包括作业人员进入作业现场前穿戴规范识别和作业中安全保障装置 的有效性监测,如安全帽、安全绳等的实时监测;行为监测包括作业人员作业全 程的行为监测,包括受限空间准入检测、作业操作规范检测等。 进一步,一种多信息融合安全隐患识别单元,安全隐患识别单元由计算控制 中心提供数据,汇总人工嗅觉数据与视觉检测数据,后经过场景匹配分析模块(400) 与多信息融合分析,实现作业现场的定性识别和当前作业场景下的安全隐患识别, 标记安全隐患位置,智能化给出作业条件整改方案。建立与特殊作业不同作业场 景高度匹配的多信息融合模型库,实现特殊作业过程信息化、定量化和智能化的 安全隐患识别。 进一步,一种多信息融合的特殊作业安全风险综合评价因子,形成多信息融 合风险评价方法,对典型作业场景(动火作业、高处作业、盲板抽堵作业、塔罐 受限空间作业、吊装作业、压力容器检测作业)全过程实时动态风险评估,对特 殊作业操作人员作业全程进行风险评级,根据风险评级和隐患识别实时提出作业 建议,构成多信息融合风险评价与动态预警方法。 进一步,本发明一种多信息融合风险评估与智能预警单元。多信息融合风险 评估与智能预警单元由计算控制中心提供数据,汇总人工嗅觉数据、视觉检测数 据和曾经检测到过的安全隐患数据,经过多信息融合风险评级分析,将作业过程 中的风险程度实时量化,并在作业风险高于阈值时发出预警,智能化给出作业建 议。 附图说明 图1为本发明的研究方案图;其中1系统计算控制中心;2为特殊作业人工嗅 觉检测单元;3为特殊作业视觉检测单元;4为多信息融合安全隐患识别单元;5 为多信息融合风险评估与智能预警单元; 图2为本发明的特殊作业现场动态隐患识别和风险评估系统的工作流程图; 图3为本发明多信息融合安全隐患识别人工嗅觉模块痕量危险气体检测原理 图; 图4为本发明多信息融合安全隐患识别图像目标检测模块原理图; 图5为本发明多信息融合风险评估与智能预警工作流程图。 图6为本发明多信息融合风险评估与智能预警单元原理图。 具体实施方式 下面结合具体的实例和附图对本发明做进一步的详细说明,所述是对本发明 的解释而不是限定。 本发明属于化学品生产单位特殊作业过程中可能涉及的动火、进入受限空间、 盲板抽堵、高处作业、吊装、临时用电等对操作者本人、他人及周围建筑、设备、 设施等安全可能造成危害的设备检修作业监测监控、安全隐患识别与风险预警的 技术,特别涉及危险挥发性组分准确检测、现场危化品识别和作业人员安全行为 识别、防护用具佩戴规范检测的方法并提出一种多信息融合安全隐患识别单元和 多信息融合风险评估与智能预警单元。 本发明一种多信息融合特殊作业现场动态隐患识别和风险评估系统,由特、 特殊作业视觉检测单元、多信息融合安全隐患识别单元、多信息融合风险评估与 智能预警单元四部分构成。 其中,特是特殊作业现场气体引起人工嗅觉模块响应,产生响应信号,输入 计算控制中心,人工嗅觉信号经过信号处理、盲源分离处理,分离出噪声信号和 有效响应信号,有效响应信号经过模式识别处理,得到特殊作业现场气体的相关 组成信息。 特殊作业视觉检测单元包括图像目标检测模块和视频行为识别检测方法。图 像目标检测模块是特殊作业现场的可见光图像和红外图像,经过预处理后进行双 视融合,增强局部细节,后在计算控制中心中进行目标检测模型的处理,标记目 标特征,即找出特殊作业现场安全隐患;视频行为识别检测方法是采集特殊作业 现场的可见光视频和红外视频,根据红外视频获取人体骨架信息,经过双视融合 形成带人体骨架信息的可见光视频,在计算控制中心中经过行为识别模型的处理, 识别作业人员的操作行为,标记危险行为。 多信息融合安全隐患识别单元是特殊作业开始前收集来自人工嗅觉的响应信 号和视觉检测的图像视频,进行场景匹配,并根据多信息融合算法,标记隐患位 置,实现危险气体检测、危险物料识别、穿戴规范检测、准入识别等。 多信息融合风险评估与智能预警单元是特殊作业过程中收集人工嗅觉模块和 摄像头模块的信息,根据风险定级算法将作业过程中的危险程度实时量化,在氧 气含量监测、痕量危险气体监测、安全用具监测、设备状态识别和操作规范监测 的基础上,汇总全要素安全状态信息,进行实时风险评定,在超过风险阈值时, 进行智能预警。 其中,所述计算控制中心用于接收人工嗅觉模块和摄像头模块的信号,并为 多信息融合安全隐患识别和多信息融合风险评估与智能预警提供算法算力支持。 以下结合附图对发明的内容进行详细说明: 如图1所示,本发明主要由五部分组成:计算控制中心1、特殊作业人工嗅觉 检测单元2、特殊作业视觉检测单元3、多信息融合安全隐患识别单元4、多信息 融合风险评估与智能预警单元5。 各部分主要功能为:计算控制中心1负责人工嗅觉模块和摄像头模块的数据 采集、分析、连接、整合;特殊作业人工嗅觉检测单元2负责对特殊作业现场气 体进行收集,对收集到的气体数据进行浓度和组分分析识别;特殊作业视觉检测 单元3负责采集特殊作业现场的图像和视频信息,经过目标检测和行为识别,为 安全隐患识别和风险评估提供算法支持;多信息融合安全隐患识别单元4对特殊 作业现场作业前进行安全隐患识别,包括危险气体检测、危险物料识别、穿戴规 范检测、准入识别等;多信息融合风险评估与智能预警单元5对特殊作业过程中 的实时危险程度进行量化,氧气含量监测、痕量危险气体监测、安全用具监测、 设备状态识别和操作规范监测的基础上,汇总全要素安全状态信息,进行实时风 险评定,在超过风险阈值时,进行智能预警。 具体的,各部分的作用如下: 所述特殊作业人工嗅觉检测方法2依赖于人工嗅觉模块200、盲源分离模块 201和模式识别模块202,人工嗅觉模块200采集特殊作业现场的气体信息,产生 的人工嗅觉响应信号经过一系列的信号处理与盲源分离模块201,实现现场气体人 工嗅觉响应的真实浓度信号与噪声信号的分离,经过模式识别模块202处理,实 现特殊作业现场痕量气体组分种类和浓度的定性定量分析。采集与识别的数据发 送到计算控制中心1。 所述特殊作业视觉检测单元3依赖于摄像头模块300、图像目标检测模块301 与视频行为识别模块302。摄像头模块300采集特殊作业现场的图像信息和视频信 息,图像和视频经过一系列的图像目标检测模块301和视频行为识别模块302处 理后标记目标特征,实现特殊作业现场的安全隐患识别和操作人员作业规范识别。 图像目标检测模块301基于红外图像与可见光图像的双视融合,摄像头模块300 采集到特殊作业环境中的图像信息,经过一系列图像预处理、图像融合与目标检 测等方法的处理,检测并识别现场视频画面中是否出现目标安全隐患;视频行为 识别模块302基于人体骨架与深度学习模型,摄像头模块300采集特殊作业过程 中操作人员的视频数据,提取骨架信息,后经过深度学习模型处理,检测并识别 作业过程中作业人员是否出现不规范操作。特殊作业视觉检测单元3检测识别后 的特征数据发送到计算控制中心1。 所述多信息融合安全隐患识别单元4应用于作业现场的全要素安全隐患识别, 由计算控制中心1提供数据,汇总人工嗅觉数据与视觉检测数据,后经过场景匹 配分析模块400与多信息融合隐患识别分析模块401,实现作业现场的定性识别和 当前作业场景下的安全隐患识别与隐患标记模块402,智能化给出作业条件整改方 案,并将检测识别到的安全隐患数据发送到计算控制中心1。 所述多信息融合风险评估与智能预警单元5应用于作业过程中风险实时评估, 由计算控制中心1提供数据,汇总人工嗅觉数据、视觉检测数据和多信息融合安 全隐患识别单元数据,经过多信息融合风险评级分析模块500,将作业过程中的风 险程度实时量化模块501,并在作业风险高于阈值时发出智能预警模块502,给出 特殊作业智能建议模块503。 所述计算控制中心1与各个模块之间相互通信,用于特殊作业人工嗅觉检测 方法2、特殊作业视觉检测单元3的数据采集、数据预处理、数据交换;同样为多 信息融合安全隐患识别单元4与多信息融合风险评估与智能预警单元5提供信号 处理、模式识别、目标检测与行为识别等算法算力支持。 包括一种人工嗅觉痕量气体检测方法。所述人工嗅觉痕量气体检测方法的基 本流程为:人工嗅觉模块200采集现场气体信号,产生气体浓度信号响应矩阵, 经过滤波器203处理,过滤部分噪声,后将时间序列的响应信号进行信号转换模 块204,输入盲源分离模块205,将真实浓度信号206与噪声信号分离207,真实 浓度信号经过模式识别模块208处理,实现痕量气体的准确识别。 如图2所示,本发明的特殊作业现场动态隐患识别和风险评估系统的工作流 程为: 特殊作业前,作业现场的气体引起人工嗅觉模块的响应,响应信号经过盲源 分离模块、模式识别模块分析现场气体种类及浓度,实现危险气体检测,检测结 果输入多信息融合安全隐患识别单元;特殊作业现场环境画面、作业人员穿戴画 面经摄像头模块采集,经过目标检测算法,实现特殊作业现场危险物料识别、穿 戴规范检测和准入识别,识别结果输入多信息融合安全隐患识别单元。 特殊作业过程中,作业现场气体引起人工嗅觉模块的响应,响应信号经过盲 源分离和模式识别模块分析,实现实时氧气监测和痕量危险气体监测;作业现场 的安全用具、人员操作视频被摄像头模块采集,经过行为识别算法分析,实现安 全用具监测、设备状态监测和作业人员操作规范监测;在实现作业现场监测的基 础上,在多信息融合风险评估与智能预警单元中对作业过程的危险程度实时量化。 如图3所示,多信息融合安全隐患识别人工嗅觉模块痕量危险气体检测原理, 人工嗅觉模块检测特殊作业现场气体,产生人工嗅觉响应信号,响应信号经过滤 波器处理,过滤部分噪声,多维人工嗅觉响应时间序列经过信号转换,生成二维 图谱,经过盲源分离模块处理,分离噪声信号和真实浓度信号,真实浓度信号经 过模式识别模块处理,得到痕量危险气体的准确浓度。 如图4所示,本发明图像目标检测的原理为:摄像头模块获取特殊作业现场 的可见光图像和红外图像,可见光图像和红外图像经过图像增强,初步提升画面 细节,后经过双视融合,红外图像和可见光图像融合为更具有画面细节的图像, 输入计算控制中心,在计算控制中心中进行目标检测,实现特殊作业场景匹配、 准入识别、危险物料识别、不规范穿戴识别等。 所述图像目标检测模块301,包括一种红外/可见光图像双视融合的安全隐患 识别算法。所述红外/可见光图像双视融合的安全隐患识别算法依赖于摄像头模块 300获取特殊作业现场的红外图像与可见光图像,红外图像与可见光图像分别经过 图像增强预处理,进行双视融合,增强图像细节,融合后的图像输入计算控制中 心1中,经过深度学习目标检测模型分析,实现特殊作业现场安全隐患目标的检 测与标记。 如图5所示,本发明视频行为识别检测的原理为:摄像头模块获取特殊作业 现场的可见光视频和红外视频,可见光视频经过图像增强,红外视频提取操作人 员的人体骨架数据,增强后的可见光视频融合人体骨架数据,进行双视融合,输 入计算控制中心,在计算控制中心中进行行为识别,实现设备状态监测、安全用 具监测、操作规范监测等。 所述视频行为识别模块302,包括一种人体骨架视频特殊作业行为隐患识别算法。所述人体骨架视频特殊作业行为隐患识别算法依赖于摄像头模块300,获取可 见光画面与红外画面,基于红外画面信息获取特殊作业人员的人体骨架数据,之 后与可见光视频进行融合,形成带人体骨架信息的视频序列,融合后的视频序列 输入计算控制中心1中,经过深度学习行为识别模型分析,实现特殊作业现场作 业人员的行为识别与隐患标记。 所述的多信息融合安全隐患识别单元4,由多信息融合终端采集特殊作业环境 中的气体、图像信息,由计算控制中心1分析、预处理数据,后经过模式识别、 目标检测、行为识别等算法,实现特殊作业环境全要素的安全隐患检测,包括特 殊作业现场痕量气体组分识别分析(判别痕量气体种类及浓度);特殊作业现场危 险物料识别(包括易燃易爆固体、高空坠物危险等);特殊作业场景匹配(判断特 殊作业基本作业形式,包括吊装作业、动火作业、动土作业、断路作业、高处作 业、设备检修维修作业、盲板抽堵作业和受限空间作业);特殊作业准备阶段安全 隐患检测(包括作业人员的身份识别、作业人员准入识别、单人作业隐患识别、 作业资质审查);特殊作业人员进入作业现场前的穿戴规范检测(安全帽、防护面 具、劳保用具等检测识别);特殊作业过程中的安全隐患识别(作业过程中气体组 分监测、氧浓度监测、有害气体监测、作业人员安全行为监测、作业人员操作规 范监测)。 如图6所示,本发明多信息融合风险评估与智能预警单元原理为:人工嗅觉 模块摄像头模块监测特殊作业现场气体、环境和人员信息,实现氧气浓度监测、 危险气体监测、安全用具监测、设备状态监测、人员穿戴监测、操作规范监测等, 并对每项监测结果根据系统预设的特殊作业过程风险评价权重库、场景匹配结果、 修正系数,生成实时局部风险评估因子,其方法为: 所述的多信息融合风险评估与智能预警单元5,基于多信息融合安全隐患识别 单元4,根据特殊作业场景匹配400信息,调用系统预设的特殊作业过程风险评价 权重库,用于特殊作业过程中以安全隐患实时监测数据为基础的风险动态评价。 一种局部风险评估因子R R R O——超出标准,由多信息融合终端测定; I——增长趋势,由多信息融合终端测定; W 局部风险评估因子根据量化值界定为三级:0 在局部风险评估因子的基础上,提出一种全要素风险评价因子R
R W 同样,全要素风险评价因子根据量化值界定为三级:0 综上所述,本发明一种多信息融合特殊作业现场动态隐患识别和风险评估系 统和方法。监测系统中包含特殊作业人工嗅觉检测方法、特殊作业视觉检测单元、 多信息融合安全隐患识别单元和多信息融合风险评估与智能预警单元,对特殊作 业全过程、全要素进行监测识别分析;提出一种特殊作业人工嗅觉痕量气体监测 方法,现场环境气体经过人工嗅觉响应、信号处理、盲源分离和模式识别,准确 检测特殊作业空间内的有害气体成分;提出一种特殊作业视觉检测单元,对特殊 作业中危险物料、人员穿戴规范、人员准入、安全用具、设备状态及操作规范等 监测分析;提出一种多信息融合安全隐患识别单元,对特殊作业全要素进行安全 隐患识别、分析和标记,实现特殊作业监管的自动化;提出一种多信息融合风险 评估与智能预警单元,对特殊作业过程中全要素进行实时风险评级与量化,并在 出现异常时及时预警。本发明解决目前特殊作业中人工监护、安全监测信息缺乏、 识别要素不全、检测准确度低、预警滞后等问题。 以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据 本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均 仍属于本发明技术方案的保护范围内。