驾驶辅助系统、车辆、车辆用灯具
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及驾驶辅助系统。
背景技术
车辆用的灯具的高功能化不断发展,作为其一例,提出了一种灯,其向路面照射光束的图案,并描绘出图形及文字。
[现有技术文献]
[专利文献]
专利文献1:日本特开2016-030527号公报
发明内容
[发明要解决的课题]
本发明在这样的状况下完成,其一个方案的例示性目的之一在于提供一种有助于交通安全的驾驶辅助系统。
[用于解决技术课题的技术方案]
本发明的一个方案涉及一种驾驶辅助系统。驾驶辅助系统包括:照明装置,其被构成为:能够以驾驶员可视认的形态,将表示本车应行驶的车道或本车应行进的方向的图案描绘于路面;以及控制器,其在通过传感器或通信在本车前方检知到障碍物时,使照明装置描绘图案。
另外,以上构成要素的任意组合、以及将本发明的表达方式在方法、装置、系统等之间转换后的结果,作为本发明的方案也是有效的。
[发明效果]
根据本发明的一个方案,能够提供一种有助于交通安全的驾驶辅助系统。
附图说明
图1是实施方式1的驾驶辅助系统的框图。
图2的(a)~图2的(c)是对驾驶辅助系统的动作进行说明的图。
图3的(a)~图3的(d)是对驾驶辅助系统的动作进行说明的图。
图4是表示躲避图案PTN的变形例的图。
图5是表示实施方式2的驾驶辅助系统的图。
图6的(a)~图6的(d)是表示躲避图案的变形例的图。
具体实施方式
(实施方式的概要)
本说明书所公开的一个实施方式涉及一种驾驶辅助系统。驾驶辅助系统包括照明装置和控制器。照明装置被构成为:能够以驾驶员可视认的形态,将表示本车应行驶的车道或本车应行进的方向的图案描绘于路面。控制器包括在通过传感器或通信在本车前方检知障碍物时,使照明装置描绘图案的控制器。
也可以是,控制器在比距障碍物停止距离的地点靠本方处,使照明装置描绘图案。由此,万一无法向图案所示的推荐方向进行转向操作,也能够在障碍物的前方停止。
也可以是,控制器在本车比停止距离更接近障碍物的情况下,报知驾驶员。由此,能够促使驾驶员进行制动或转向操作。
也可以是,控制器根据周围的状况来调节图案的描绘定时。
也可以是,控制器能够检知来自本车后方的超车车辆,并在检知到超车车辆时,在超车完成后使图案被描绘。由此,能够防止插入到超车车辆之前、妨碍超车车辆通行的情况。
也可以是,控制器能够检知来自本车后方的超车车辆,在检知导超车车辆时,除了示出本车的行进方向以外,图案还会示出存在超车车辆。由此,能够向驾驶员报知超车车辆的存在,并能够防止会引发紧急制动那样的插入。
(实施方式)
以下,参照附图,基于优选的实施方式对本发明进行说明。实施方式并不对发明进行限定,仅为例示,实施方式所记述的所有特征及其组合不一定都是发明的本质特征。针对各附图所示的相同或等同的构成要素、构件、处理标注相同的附图标记,并适当省略重复的说明。
(实施方式1)
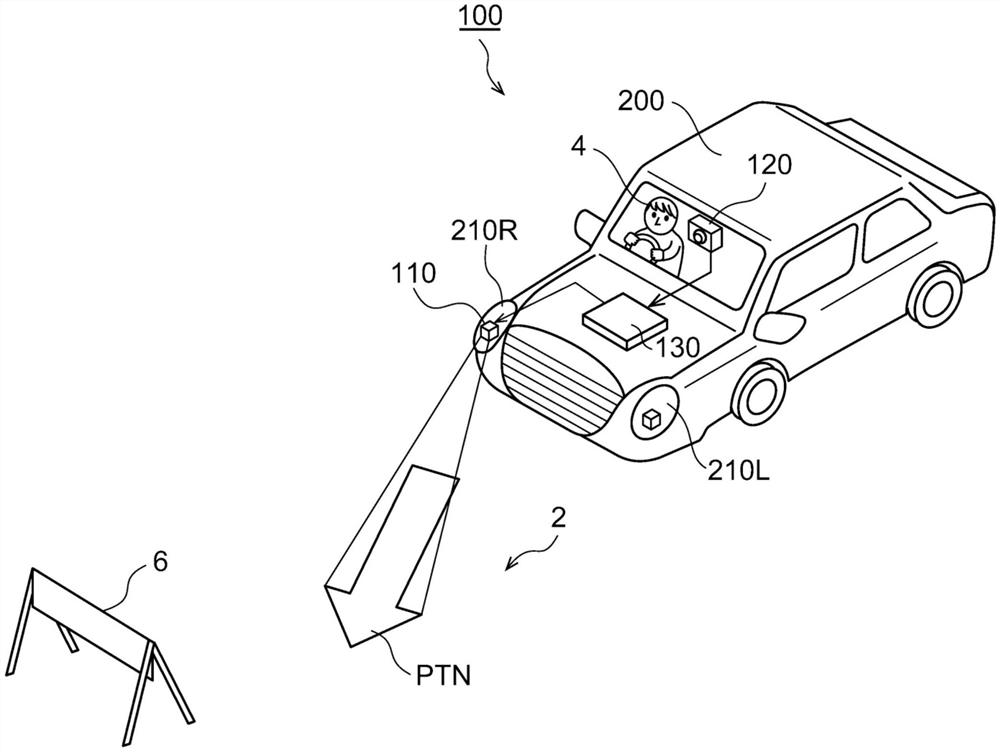
图1是实施方式1的驾驶辅助系统100的框图。驾驶辅助系统100被搭载于车辆200。驾驶辅助系统100包括照明装置110、传感器120、以及控制器130。
照明装置110被构成为:以驾驶员4可视认的方案,将表示本车200为了躲避前方的障碍物6而应行进的方向的图案(以下,称为躲避图案)PTN描绘于路面2。障碍物6为不规则的物体,可例示表示禁止通行、施工现场、故障车等的路障、看板、灯饰、路锥等。
因为可能会发生向右躲避的情况和向左躲避的情况,所以最低需要2种躲避图案。为了对这2种图案进行切换,也可以以光源与使光源的出射光的强度分布图案化的图案化设备的组合来构成照明装置110。作为图案化设备,可例示DMD(Digital MicromirrorDevice:数字微镜器件)或液晶设备等。由此,照明装置110也能够利用于描绘躲避图案以外的图案。
或者,也可以是,利用专用的照明装置来分别描绘向右躲避的情况下的躲避图案和向左躲避的情况下的躲避图案。
也可以是,照明装置110被内置于前照灯210。也可以是,照明装置110包含被内置于左右前照灯210的2个光源,躲避图案PTN由2个光源所生成的2根光束来形成。
传感器120对车辆前方进行感测。传感器120的种类不被限定,但例如可例示单眼照相机、复眼照相机、红外线照相机、ToF(Time of Flight:飞行时间)传感器、以及LiDAR(Light Detection and Ranging,Laser Imaging Detection and Ranging:光探测和测距、激光成像探测和测距)等。传感器120的设置位置不被特别地限定,如图1所示,既可以是室内镜的背面,也可以是前格栅,还可以是前保险杠。或者,也可以是,传感器120被与照明装置110一同收容于前照灯210。
控制器130基于传感器120的输出IMG来判定本车200的前方有无障碍物6。然后,控制器130在检知到障碍物6时,使照明装置110描绘躲避图案PTN。
也可以是,将驾驶辅助系统100的全部构成要素内置于前照灯210等车辆用灯具。以配光可变灯(ADB:Adaptive Driving Beam;自适应远光灯)为代表的高功能车辆用灯具内置有照相机及处理器等,因此具备大部分驾驶辅助系统100所需的硬件。在这种情况下,能够通过将驾驶辅助系统100安装于前照灯210来使硬件共通化。
以上是驾驶辅助系统100的构成。接着,对其动作进行说明。图2的(a)~图2的(c)是对驾驶辅助系统100的动作进行说明的图。车辆200正在单侧2车道的道路中的右侧的车道中向图面上方行驶。在车辆200的前方存在障碍物6。
控制器130在基于传感器120的输出而检测到障碍物6时,将躲避图案PTN描绘于路面。在该场景中,因为无法向右方向躲避,所以会描绘催促向左车道的车道变更的躲避图案PTN。也可以是,除了躲避图案PTN的描绘以外,对驾驶员在听觉上催促车道变更。
识别出躲避图案PTN的驾驶员能够向左转动方向盘。由此,车辆200能够向左车道移动,躲避障碍物6。
在行驶于左车道中,左车道存在障碍物的情况下,会描绘催促向右车道的车道变更的躲避图案。
像这样,根据实施方式的驾驶辅助系统100,能够通过事先唤起注意来确保驾驶操作的余裕,从而能够支持安全驾驶。
如图2的(b)所示,控制器130在比距障碍物6停止距离d
也可以是,照明装置110根据到障碍物6的距离来使躲避图案PTN变化。例如,也可以是,随着到障碍物6的距离变近来提高描绘躲避图案PTN的光的强度。或者,也可以是,随着到障碍物6的距离变近,使躲避图案PTN闪烁,从而唤起驾驶员进一步的注意。
此外,也可以是,控制器130在本车200到障碍物6的距离小于停止距离的情况下报知驾驶员4。报知的手段并不被限定,既可以是警告音等听觉手段,也可以是利用了灯或仪表板的视觉手段,还可以是振动等触觉手段。由此,能够催促驾驶员进行制动或转向操作。
图3的(a)~图3的(d)是对驾驶辅助系统100的动作进行说明的图。控制器130根据周围的状况来对躲避图案PTN的描绘定时进行调节。在该例中,如图3的(a)所示,车辆200正在单侧2车道的道路中的左侧的车道中向图面上方行驶。在车辆200的前方,存在障碍物6。如图3的(b)所示,在变更后的车道(右侧车道),存在来自本车200后方的超车车辆202。在该情况下,当忽视超车车辆202而直接描绘躲避图案PTN时,会插入到超车车辆202的正前方,并不理想。在这种情况下,如图3的(c)所示,待机到超车车辆202的超车完成为止,并在完成后描绘躲避图案PTN。
超车车辆202的存在及超车的完成既可以由车辆200所搭载的传感器来检测,也可以通过车辆间通信来检测,还可以通过与基础设施之间的通信来检测。
作为应对描绘躲避图案PTN的定时进行调节的场景,还考虑以下场景。
例如,在交叉路口前存在障碍物6的情况下,在交叉路口中进行车道变更并不理想。在该情况下,也可以是,在完成交叉路口的通过后,描绘躲避图案PTN。
可能会存在按当前的车速来进行车道变更并不理想的状况。在该情况下,也可以是,直到加速或减速到理想的车速为止进行待机,并在成为理想的车速后描绘躲避图案PTN。
图4是表示躲避图案PTN的变形例的图。如上所述,也可以是,控制器130能够检知来自本车后方的超车车辆202。在该情况下,也可以是,检知到超车车辆202时的躲避图案PTN’示出本车的行进方向,并且示出存在超车车辆202。在该例中,大箭头的标记400示出应行进的方向,小箭头的标记402示出超车车辆202的存在。由此,能够向驾驶员4报知超车车辆202的存在,并能够防止会引发紧急制动那样的插入。
(实施方式2)
图5是表示实施方式2的驾驶辅助系统100A的图。驾驶辅助系统100A除了传感器120之外,或代替它地,包括无线通信装置140。无线通信装置140从交通基础设施8确定表示车辆周围状况的信息。在该信息中,也包含与存在于车辆前方的障碍物6有关的信息。控制器130基于无线通信装置140所取得的信息来检知障碍物6并描绘躲避图案PTN。
也可以是,无线通信装置140除了交通基础设施8以外,或代替它地,能够在与被搭载于其他车辆的无线通信装置之间进行通信,并从其他车辆取得与障碍物6有关的信息。
以上,针对本发明,基于实施方式进行了说明。本领域技术人员应理解的是,该实施方式仅为例示,在它们的各构成元素或各处理过程的组合中,可能存在各种变形例,且那样的变形例也在本发明的范围之内。以下,针对这样的变形例进行说明。
(变形例1)
图6的(a)~图6的(d)是表示躲避图案的变形例的图。如图6的(a)~图6的(c)所示,表示推荐行进方向的箭头不被限定于指向倾斜方向的箭头。此外,也可以是,如图6的(d)所示,除了箭头以外,还包含在视觉上示出存在障碍物的标记404。
(变形例2)
也可以是,除了躲避图案以外,照明装置110还能够将其他图案描绘于路面。在该情况下,例如也可以是,读出道路标识或法定最高速度,并通过照明装置110将读出的信息描绘于路面。或者,也可以是,将基于导航的推荐行进方向描绘于路面。
(变形例3)
在行驶中的车辆发生故障或异常的情况下,该车辆会成为将来的潜在障碍物。因此,也可以是,发生故障或异常的车辆通过车辆间通信向后续车辆通知该消息。也可以是,后续车辆在从前车接收到通知时,以其作为触发,将前车作为障碍物来处理,并将躲避图案PTN描绘于路面。
虽然基于实施方式,使用具体的语句来对本发明进行了说明,但实施方式仅表示本发明的原理、应用的一个侧面,在实施方式中,在不脱离权利要求书所规定的本发明的思想的范围内,允许对许多变形例或配置进行变更。
[工业可利用性]
本发明涉及驾驶辅助系统。
[附图标记说明]
2路面
4驾驶员
6障碍物
8交通基础设施
100驾驶辅助系统
110照明装置
120传感器
130控制器
140无线通信装置
200车辆
202车辆
210前照灯
- 驾驶辅助系统、车辆、车辆用灯具
- 车辆驾驶辅助系统、方法和带有车辆驾驶辅助系统的车辆