一种用于高速磁浮列车车厢横向/垂向平稳性预测方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及磁浮列车领域,尤其是涉及一种用于高速磁浮列车车厢横向/垂向平稳性预测方法。
背景技术
磁浮列车在运行时车轨之间除供电靴轨接触外没有其它机械接触,降低了机械磨损,减少了摩擦噪声,具有较高的环保优势,逐渐成为一种新型的轨道交通工具。高速磁浮列车能够有效突破轮轨接触造成的速度上限,从而以较低的能耗达到更高的运行速度。目前磁浮列车的发展具有多制式的特征,根据悬浮原理的不同可划分为三大类,一类为常导电磁悬浮(EMS)型,一类为电动悬浮(EDS)型,另外一类为结合了EMS型和EDS型的部分特征构成的混合悬浮型。其中,EMS型磁浮列车的发展相比之下最为成熟,目前已在上海、北京、长沙等地实现工程化运营。而EDS型磁浮列车在国内发展较为成熟,在日本已建成了低温超导磁浮试验车并建成配套试验线(山梨线),而在国内目前西南交通建成了世界首条高温超导高速磁浮试验车,但是由于试验线较短,目前还还在深入研究过程中。针对第三类混合悬浮技术,目前研究尚不具备工程化条件,还停留在实验室研究阶段。然而,目前实现商业运行且时速最高的高速磁浮列车为上海高速磁浮列车,采用电磁悬浮(EMS)型,商业运行时速为430km/h。
由于EMS型高速磁浮列车的技术成熟度相对较高,在基于既有常导电磁悬浮技术进行进一步提速在工程技术方面具有更高的可行性。然而,作为地面轨道交通载运工具的一种制式,不可避免地会受到地面复杂工况的影响,尤其是在更高速度下复杂扰动的叠加一方面对列车无接触悬浮性能提出了更高的考验,另一方面需要进一步考虑列车的乘坐感受。因此在考虑列车的进一步提速时必须考虑车厢平稳性的问题。由于目前缺乏足够长的轨道线路验证更高时速下的列车平稳性,无法通过实际跑车试验验证列车在高速度运行过程中的车厢横向/垂向平稳性情况。因此能够预测高时速下平稳性的相关方法对于验证列车进一步提速的可行性具有一定工程意义。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种用于高速磁浮列车车厢横向/垂向平稳性预测方法。
本发明的目的可以通过以下技术方案来实现:
一种用于高速磁浮列车车厢横向/垂向平稳性预测方法,包括以下步骤:
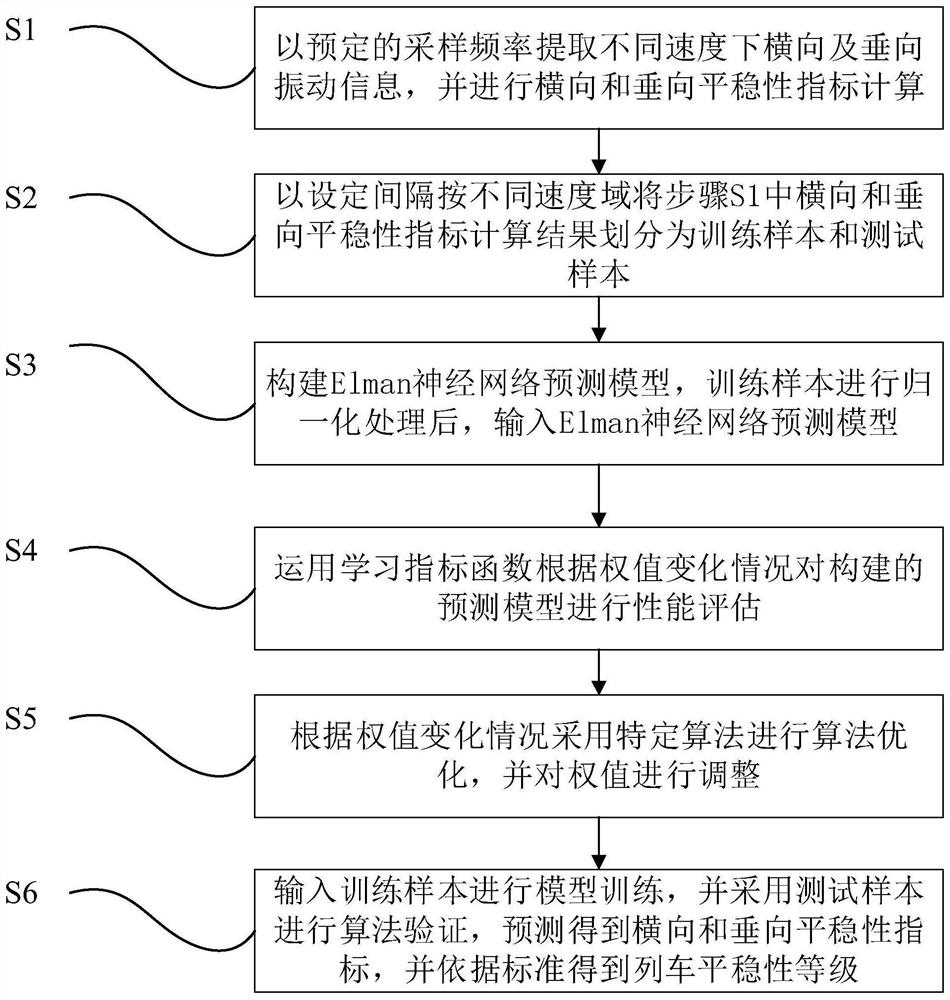
S1、以预定的采样频率从车厢振动传感器中提取不同速度下横向及垂向振动信息,并进行横向和垂向平稳性指标计算;
S2、以设定间隔按不同速度域将步骤S1中横向和垂向平稳性指标计算结果划分为训练样本和测试样本;
S3、构建Elman神经网络预测模型,训练样本进行归一化处理后输入Elman神经网络预测模型,减小奇异样本数据导致的不良影响;
S4、运用学习指标函数根据权值变化情况对构建的Elman神经网络预测模型进行性能评估;
S5、根据权值变化情况结合设定算法进行算法优化,并对权值进行调整,避免在权值更新过程中陷入局部最优或训练速度过慢的情况;
S6、采用测试样本进行算法验证,预测得到横向和垂向平稳性指标,并参照GB5599-2019标准得到列车平稳性等级。
进一步地,所述的步骤S1中,平稳性计算表达式为:
其中,i=1,2,...,n,A
进一步地,所述的步骤S2中训练样本为0km/h,10km/h,20km/h,…,300km/h速度下平稳性计算结果;测试样本为310km/h,320km/h,…,430km/h速度下平稳性计算结果。
进一步地,所述的步骤S4中以误差平方函数的0.5倍作为学习指标函数针对输入层-隐含层权值、承接层-隐含层权值、隐含层-输出层权值变化情况下进行当前网络模型的性能评估。
进一步地,所述的步骤S5中设定算法为粒子群算法(PSO)以及引力搜索算法(GSA)。
进一步地,所述的粒子群算法首先对引力搜索算法进行优化,考虑有质量粒子之间的信息交互特性,得到优化后的粒子寻优移动速度:
其中,
进一步地,所述的粒子寻优移动速度,其所处位置表示为:
求得t+1时刻的粒子位置,视为在t+1时刻的理想权值。
进一步地,所述的步骤S5中将所求的权值带入用于高速磁浮列车平稳性预测的Elman模型,分别计算隐含层输出及输出层输出:
x(k)=f(ω
y(k)=g(ω
其中,x(k)为隐含层输出,ω
进一步地,所述的横向及垂向振动信息为列车车厢横向/垂向振动加速数据,针对车厢端部、车厢中部、车厢尾部分别布置加速度传感器用以测量车厢横向/垂向振动。
进一步地,所述的步骤S1中横向和垂向平稳性指标计算通过GB5599-2019标准中平稳性指标的相关定义计算得到。
与现有技术相比,本发明具有以下有益效果:
1.本发明所构建的Elman神经网络预测模型,相比于传统测量列车平稳性的方法,所建立的预测模型经过算法的优化,能够在没有实际跑车试验的场地和条件下对更高运行速度下的车厢平稳性进行初步估计。
2.本发明通过采用PSO算法对GSA算法进行优化,可以提高GSA算法在全局内的寻优速度,并且使其不易陷入局部最优,为所构建的Elman神经网络预测模型提供算法基础,加快车厢横向/垂向平稳性指标的预测。
3.本发明通过采用PSO-GSA算法对Elman神经网络预测模型进行优化,优化结果作为磁浮列车平稳性预测Elman神经网络模型的权值寻优路径,相比以往现有技术采用梯度下降法进行权值调整的情况可以获得更为精确的权值,从而提高预测准确性。
附图说明
图1为本发明的流程示意图。
图2为本发明涉及的Elman网络基本预测结构示意图。
图3为本发明涉及的PSO-GSA算法优化流程示意图。
图4为本发明涉及的PSO-GSA-Elman算法流程示意图。
图5为本发明涉及的PSO-GSA-Elman算法权值修正流程示意图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
如图1所示为本发明的流程示意图,一种用于高速磁浮列车车厢横向/垂向平稳性预测方法,包括以下步骤:
S1、以预定的采样频率从车厢振动传感器中提取不同速度下横向及垂向振动信息,并进行横向和垂向平稳性指标计算;
S2、以设定间隔按不同速度域将步骤S1中横向和垂向平稳性指标计算结果划分为训练样本和测试样本;
S3、构建Elman神经网络预测模型,训练样本进行归一化处理后输入Elman神经网络预测模型;
S4、运用学习指标函数根据权值变化情况对构建的Elman神经网络预测模型进行性能评估;
S5、根据权值变化情况结合设定算法进行算法优化,并对权值进行调整;
S6、采用测试样本进行算法验证,预测得到横向和垂向平稳性指标,并参照GB5599-2019标准得到列车平稳性等级。
如图2所示,为获取原始数据,分别针对车厢前部、车厢中部、车厢后部安装传感器,在0km/h~430km/h实际运行速度工况下以预定频率进行车厢横向/纵向振动采集,并以10km/h为单位进行速度域的划分,划分完成后基于GB5599-2019标准对不同速度域的横向/垂向振动数据进行平稳性指标计算。训练样本(0km/h,10km/h,20km/h,…,300km/h时速下的平稳指标)进行归一化处理后作为图2所示Elman神经网络预测模型输入向量,此外,定义神经元个数、训练函数f(·)和g(·)、迭代次数、误差容限以及初始权值得到本文所涉及预测方法的基本结构。
如图3所示,采用PSO-GSA算法对Elman神经网络预测模型进行权值寻优,寻优速度(粒子移动速度)的表达式为:
其中,
其中,
惯性质量可根据适应度进行求解,当适应度越大时粒子质量约大,越容易吸引其他粒子向其所在位置运动。因此可以理解为质量越大的粒子所处的位置越接近搜索空间内的最优解。粒子惯性质量计算公式为:
M
其中,ω
根据所求解得到的最佳权值(粒子最优位置)进行Elman网络权值调整,并采用图4所示流程进行输出更新,此外,采用以误差平方函数的0.5倍作为学习指标函数针对网络模型的性能评估,确定系统误差是否满足设定条件。
如图5所示,在PSO-GSA算法内部定义误差可以对所得权值(粒子位置)进行判断,若为全局最优解,则对权值(粒子位置)进行调整,若不为最优解,则持续迭代,直至满足停止条件。
本实施例的工作原理为:
Elman神经网络输入训练样本集中0km/h~310km/h速度域的平稳性指标数据,经过隐含层f(·)函数的计算,并经过承接层再次返回到隐含层进行计算,计算结果经过非线性函数g(·)再次计算进行输出层输出。f(·)和g(·)函数所需权值基于PSO-GSA算法寻优获得,网络性能通过0.5倍的误差平方进行评估。若不满足性能评估条件,则权值进行持续更新,网络根据更新得到的权值进行持续训练,直至满足性能要求或满足其他停止条件。训练完成后采用测试样本集中310km/h~430km/h速度域的平稳性指标数据进行对比,在拟合度方面若能满足要求,则说明网络性能良好,可以用以预测更高时速下的车厢横向/垂向平稳性状态。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
- 一种高速列车横向平稳性与横向稳定性匹配控制方法
- 一种磁浮列车、悬浮控制系统及提高运行平稳性的方法