一种六自由度振动台调平控制器系统及方法
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及六自由度振动台平台电控系统领域,具体为一种六自由度振动台调平控制器系统及方法。
背景技术
六自由度振动台是一种多维(多自由度)振动仿真控制系统,其试验台在空间上有6个自由度,能满足在空间中模拟刚性物体的任意运动状态。本发明专利主要以八驱动三轴六自由度电动振动试验系统为研究对象,系统模型如图1所示,通过8个电动振动台作为激励单元,在其上产生三轴六自由度振动。
实验过程中,被测试件本身的重量以及振动台系统机械和电气部件自身结构的缺陷,可能会引发振动台平台位姿在静态和动态时偏离理想位姿的现象,从而导致振动台测试精度降低,甚至出现系统故障。振动台作为振动测试设备,其自身的可靠性和精度直接影响着被测试件的精确度,所以振动台平台调平控制系统对于高可靠性和高精度振动台来说尤为重要。
目前,国内外对于振动台调平控制主要局限于单轴振动台,几乎没有多自由度振动台调平控制相关的研究。
发明内容
针对上述情况,为克服现有技术的缺陷,本发明提供一种六自由度振动台调平控制器系统及方法,有效的解决了上述技术背景中提到的问题。
为实现上述目的,本发明提供如下技术方案:本发明包括人机交互单元、信息输入单元、控制单元和执行单元:
人机交互单元:用于显示系统当前状态信息并提供用户操作接口;
信息输入单元:用于采集每组振动台平台的状态信息;
控制单元:用于根据所述状态信息输出相应的气动元件控制信号;
执行单元:用于根据所述气动元件控制信号驱动相应的气动元件执行相应动作。
根据上述技术方案:所述信息输入单元包括:
激光位移传感器,用于检测每组振动台空气弹簧的形变信息;
压力变送器,用于检测输出到空气弹簧的气流压强。
根据上述技术方案:所述控制单元包括:
工控机,用于运行核心调平控制的交互式软件;
单片机,用于进行A/D、D/A转换,以及发出控制信号开关量;
A/D转换模块,用于将输入模拟量转换为数字量;
D/A转换模块,用于将数字量转换为模拟量以控制比例压力阀状态;
继电器模块,用于接收单片机控制信号并实际对电磁阀进行对应控制。
根据上述技术方案:所述执行单元包括:
比例压力阀,根据输入电信号调节比例压力阀与电磁阀2之间气室气压;
电磁阀1,控制空气弹簧气压调节的总开关;
电磁阀2,控制空气弹簧定量充放气的开关。
所述调平具体过程如下:
a.通过激光位移传感器读取每个空气弹簧的形变量;
b.通过正运动学求解每个影响末端平台的空气弹簧形变量来得到末端平台的位姿;
c.调平路径规划,即对调平时的运动轨迹进行插值规划,得到一系列运动过程中的插值位姿状态;
d.通过逆运动学求解的方法将上述每个插值对应的平台位姿反求出每个空气弹簧的形变量;
e.最后,通过多轴运动控制12组空气弹簧,实现末端平台的调平对中。
根据上述技术方案:所述气动执行过程的单个调平周期内气动执行过程日下:
a.采集压力变送器反馈的气压值;
b.提取单个控制周期内空气弹簧的位移直流分量,并计算与标定的期望值之间的误差;
c.判断流程b中的误差是否超出调平对中的精度范围,若超出则进行下一步操作,否则本次调平周期结束,进入下一个扫描周期;
d.将误差值与压力变送器压力值计算反馈值,所得结果输出给比例压力阀同时开启电磁阀1;
e.比例阀调节后,依次关闭电磁阀1,打开电磁阀2,实现对空气弹簧的定量充放气,至此完成单个周期的调平控制。
有益效果:本发明采用此方案的六自由度振动台调平策略在不改变原有台体结构的基础上,仅增加一些外部控制、检测和执行原件,能够对六自由度振动台台面进行快读调平对中,控制过程平滑稳定,现场调试方便,对于多自由度振动台调平控制系统的发展具有推进作用。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
图1是本发明八驱动六自由度振动台结构示意图;
图2是本发明激光位移传感器布置示意图;
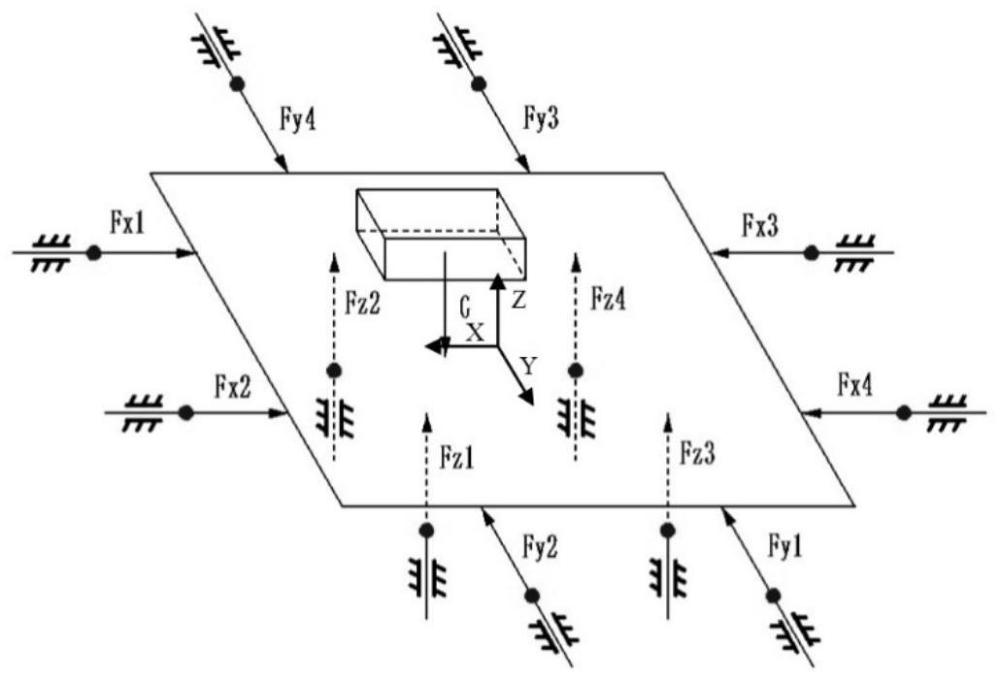
图3是本发明调平时的推力分布示意图;
图4是本发明控制系统结构图;
图5是本发明电气方案原理图;
图6是本发明静态调平对中方法流程图。
具体实施方式
下面结合附图1-6对本发明的具体实施方式做进一步详细说明。
实施例一,由图1-6给出,本发明提供一种六自由度振动台调平控制器系统及方法,包括人机交互单元、信息输入单元、控制单元和执行单元:
人机交互单元:用于显示系统当前状态信息并提供用户操作接口;
信息输入单元:用于采集每组振动台平台的状态信息;
控制单元:用于根据所述状态信息输出相应的气动元件控制信号;
执行单元:用于根据所述气动元件控制信号驱动相应的气动元件执行相应动作。
所述信息输入单元包括:
激光位移传感器,用于检测每组振动台空气弹簧的形变信息;
压力变送器,用于检测输出到空气弹簧的气流压强。
所述控制单元包括:
工控机,用于运行核心调平控制的交互式软件;
单片机,用于进行A/D、D/A转换,以及发出控制信号开关量;
A/D转换模块,用于将输入模拟量转换为数字量;
D/A转换模块,用于将数字量转换为模拟量以控制比例压力阀状态;
继电器模块,用于接收单片机控制信号并实际对电磁阀进行对应控制。
所述执行单元包括:
比例压力阀,根据输入电信号调节比例压力阀与电磁阀2之间气室气压;
电磁阀1,控制空气弹簧气压调节的总开关;
电磁阀2,控制空气弹簧定量充放气的开关。
所述调平具体过程如下:
a.通过激光位移传感器读取每个空气弹簧的形变量;
b.通过正运动学求解每个影响末端平台的空气弹簧形变量来得到末端平台的位姿;
c.调平路径规划,即对调平时的运动轨迹进行插值规划,得到一系列运动过程中的插值位姿状态;
d.通过逆运动学求解的方法将上述每个插值对应的平台位姿反求出每个空气弹簧的形变量;
e.最后,通过多轴运动控制12组空气弹簧,实现末端平台的调平对中。
所述气动执行过程的单个调平周期内气动执行过程日下:
a.采集压力变送器反馈的气压值;
b.提取单个控制周期内空气弹簧的位移直流分量,并计算与标定的期望值之间的误差;
c.判断流程b中的误差是否超出调平对中的精度范围,若超出则进行下一步操作,否则本次调平周期结束,进入下一个扫描周期;
d.将误差值与压力变送器压力值计算反馈值,所得结果输出给比例压力阀同时开启电磁阀1;
e.比例阀调节后,依次关闭电磁阀1,打开电磁阀2,实现对空气弹簧的定量充放气,至此完成单个周期的调平控制。
工控机、触摸屏、单片机、A/D转换模块、D/A转换模块、继电器模块、激光位移传感器、比例压力阀、气泵、电磁阀1、压力变送器、电磁阀2和空气弹簧,所述工控机向上与触摸屏电性连接,工控机向下与单片机电性连接,单片机的输出端电性连接继电器模块和D/A转换模块,D/A转换模块的输出端电性连接比例压力阀,单片机的输入端电性连接A/D转换模块,A/D转换模块的输入端电性连接激光位移传感器,比例压力阀的输入端电性连接气泵,比例压力阀的输出端电性连接电磁阀1,电磁阀1的输出端电性连接压力变送器,压力变送器的输出端电性连接单片机的输入端,压力变送器的输出端电性连接电磁阀2,电磁阀2的输出端电性连接空气弹簧,继电器模块的输出端分别电性连接电磁阀1和电磁阀2。
本方案采用激光位移传感器及梯形滑块对每个空气弹簧的伸缩线位移进行测量,具体的单轴机械结构改造及传感器布置如图2所示。八驱动六自由度振动台拥有12组空气弹簧,其简化后的力学模型如图3所示。为了实现调平过程中的内力解耦,抑制超调后的内力超过预设限制,本发明中选取Z方向上的4个空气弹簧和X1、X2、Y1、Y2方向上的4个空气弹簧进行主动位置伺服控制,而其余方向上的4个空气弹簧由比例压力阀保持其内部为一个恒定压力进行被动调平控制。
本发明中单个空气弹簧所采用的是基于气体压力调节的位置伺服控制系统,系统结构图如图4所示,本系统设计采用同直径下通过控制气压从而控制弹性力的方案,结合速度闭环控制与位置闭环控制,达到精确稳定快速的单一轴精确控制,静态调平时可将初始标定值作为期望值,对Z1、Z2、Z3、Z4、X1、X2、Y1、Y2方向的空气弹簧进行上述闭环控制,将另外4个空气弹簧设定为只执行压力闭环以实现被动稳压,即可实现解耦的静态调平对中位置伺服。
图5为单轴调平电气方案原理图,为实现上述调平伺服控制,设计了由触摸屏、激光位移传感器、气泵、空气弹簧、控制部分和执行部分组成的电气系统。具体的控制部分包括工控机、单片机、A/D模块、D/A模块、继电器模块,执行部分包括比例压力阀、电磁阀1、电磁阀2、压力变送器。工控机负责运行核心调平控制的交互式软件,单片机负责进行A/D、D/A转换和发出控制信号开关量,A/D转换模块负责将激光位移传感器、压力变送器输入的模拟量转换为数字量,D/A转换模块负责将数字量转换为模拟量以控制比例压力阀状态,继电器模块负责接收单片机控制信号并实际对电磁阀1、电磁阀2进行对应控制;比例压力阀负责调节比例压力阀与电磁阀2之间气室气压;压力变送器负责监测当前气流通路的压强;电磁阀1是控制空气弹簧气压调节的总开关;电磁阀2是控制空气弹簧定量充放气的开关,触摸屏负责人机交互,激光位移传感器负责采集空气弹簧的伸缩线位移并反馈给控制部分,气泵负责向执行部分提供动力,空气弹簧为最终的实际被控元件
有益效果:本发明采用此方案的六自由度振动台调平策略在不改变原有台体结构的基础上,仅增加一些外部控制、检测和执行原件,能够对六自由度振动台台面进行快读调平对中,控制过程平滑稳定,现场调试方便,对于多自由度振动台调平控制系统的发展具有推进作用。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种用于高地隙植保机自适应调平底盘的调平系统及其调平方法
- 一种三维打印平台的调平方法及使用该方法的调平系统
- 一种消防卷帘调平系统及其调平方法
- 一种基于六自由度并联机构的海底钻机自动调平系统
- 一种基于六自由度并联机构的海底钻机自动调平系统