一种基于多物理场耦合的微镜芯片设计分析方法
文献发布时间:2024-01-17 01:24:51
技术领域
本发明属于微机电系统领域,特别是涉及一种基于多物理场耦合的微镜芯片设计分析方法。
背景技术
MOEMS微镜是指采用MEMS技术制备的,通过微驱动器实现微反射镜驱动的一种MEMS光学器件。其工作原理是,驱动器带动微镜镜面旋转来达到扫描成像的目的,通过微镜镜面使入射光束按照特定的方式与时间顺序发生反射。传统的扫描镜驱动功耗大、体积大、扫描频率低,而且成本较高,大大限制了其应用场景。近年来,随着集成电路技术的高速发展,MEMS领域得到快速发展。MOEMS扫描微镜制作成本较低同时可以实现批量化生产,大大增大了其应用场景,可以应用在对成本敏感的消费电子产品上。相较于传统扫描微镜,MOEMS微镜具有体积小、驱动功耗低、扫描频率高和响应速度快等优点,使其广泛应用于各大领域,如激光投影、三维成像激光雷达、光通信、虚拟现实等。
根据驱动方式的不同,常见的MOEMS扫描镜可以分为四种类型,分别是静电驱动、电磁驱动、压电驱动和电热驱动。静电驱动扫描镜是一种电压驱动型器件,利用静电吸引力来驱动微镜产生偏转或平移,一般采用单晶硅进行制备,同集成电路工艺有良好的工艺兼容性。
静电驱动微镜相较于其余三种驱动方式而言,应用更广泛。这是由于静电驱动微镜具有制作工艺简单、功耗低、体积小、可以产生高扭矩等优点,并且通常用于产生稳定且宽的连续动态角运动范围。静电驱动微镜又可以分为平板式结构和梳齿式结构,其中梳齿式结构又可以分为角垂直梳齿结构(AVC)和交错垂直梳齿驱动结构(SVC)。交错垂直梳齿驱动结构的可动梳齿和固定梳齿具有平移和梳齿厚度可变的特点,且在工艺上制备较为容易,故而受到广泛研究者的青睐。
对于复杂的交错垂直梳齿驱动结构而言,尤其是对于存在万向节以及较多梳齿的双轴静电驱动微镜,当考虑反射镜以及万向节和空气作用存在阻尼效应的时候,计算效率低下,计算时间尤为冗长。因此,如何改善交错垂直梳齿驱动结构的计算方法,降低交错垂直梳齿驱动结构的计算时长是目前行业内需要解决的问题。
发明内容
本发明的目的是提供一种基于多物理场耦合的微镜芯片设计分析方法,以解决上述现有技术存在的问题。
为实现上述目的,本发明提供了一种基于多物理场耦合的微镜芯片设计分析方法,包括:
建立梳齿偏转角度与力矩的映射关系;
基于所述映射关系对单轴可调微镜静电驱动器进行稳态分析及对比验证,获得验证结果;
验证通过后对双轴可调微镜静电驱动器进行自主三维建模,获得三维模型,对三维模型进行自适应网格划分;
基于划分后的三维模型对双轴可调微镜静电驱动器进行静电物理场稳态分析运算,获得对应电压下梳齿的电荷分布情况和双轴的力矩大小;
对双轴可调微镜静电驱动器构建多物理场耦合方程,对三维模型进行多物理场耦合方程的频域运算,获得对应电压和压强下机械偏转角度,与实际测试数据对比,对双轴可调微镜静电驱动器的实际工作状态进行评估,并基于评估的结果实现微镜结构的设计。
可选的,通过对梳齿单元进行近似周期边界条件处理得到梳齿偏转角度与力矩的映射关系,所述映射关系表示为:
其中,τ表示梳齿的静电力矩,n表示梳齿的个数,
可选的,对单轴可调微镜静电驱动器进行稳态分析的过程包括:
建立单轴可调微镜静电驱动器的三维几何结构;
对所述三维几何结构进行六面体网格剖分处理,获得物理模型的六面体单元信息,对旋转轴部分进行加密处理;
对所述单轴可调微镜静电驱动器进行电学稳态分析,提取对应电压下的静电力矩,将所述静电力分布在梳齿部分,对单轴可调微镜静电驱动器进行力学稳态分析,获得单轴可调微镜静电驱动器的第一机械偏转角度。
可选的,对比验证的过程包括:
构建单轴可调微镜静电驱动器的第一多物理场耦合方程;
基于所述第一多物理场耦合方程运算获得第二机械偏转角度,若所述第一机械偏转角度与第二机械偏转角度相同,则验证通过;
其中,第一多物理场耦合方程通过静电场方程、力学方程两个方程连立获得。
可选的,频域运算的过程包括:对双轴可调微镜静电驱动器添加热黏性声学多物理场,使用有限元方法对模型进行第二多物理场耦合方程的频域运算,其中,所述多物理场耦合方程包括力学方程和热黏性声学方程。
可选的,进行频域运算之前还包括:
对所述三维模型进行六面体网格剖分处理,获得物理模型的六面体单元信息,对所述六面体单元信息的旋转轴部分进行加密处理。
可选的,所述热黏性声学方程为:
ρ
式中,ρ
可选的,所述力学方程为:
其中,ρ表示密度,u表示空间位置,
本发明的技术效果为:
本发明首先建立梳齿偏转角度和力矩的映射关系,再根据该映射关系对单轴可调微镜静电驱动器进行实施验证,最终使用有限元方法对复杂的双轴静电驱动器进行仿真,从而更快地对双轴静电驱动器进行热黏性声学和力学耦合的频域分析,可对双轴可调微镜静电驱动器进行更高效的优化设计,达到改善交错垂直梳齿驱动结构的计算方法,降低交错垂直梳齿驱动结构的计算时长的效果。
附图说明
构成本申请的一部分的附图用来提供对本申请的进一步理解,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
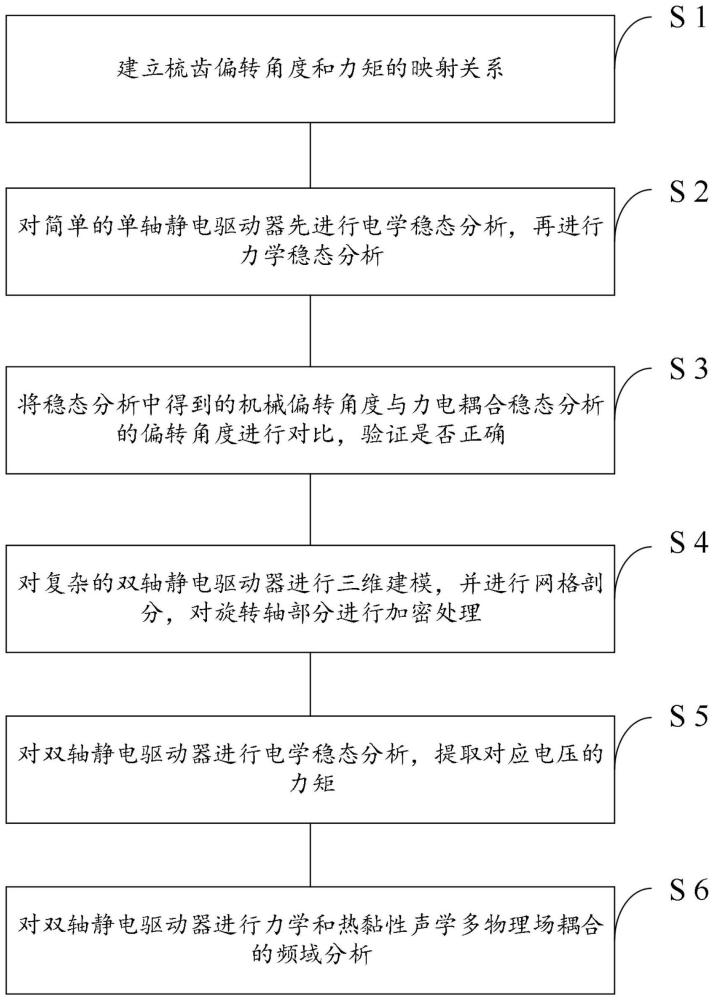
图1为本发明实施例中的MOEMS微镜芯片设计分析方法的流程图;
图2为本发明实施例中的MOEMS微镜芯片设计分析方法的梳齿力矩和偏转角度映射关系的模型结构示意图;
图3为本发明实施例中的MOEMS微镜芯片设计分析方法的的梳齿力矩和偏转角度映射关系的仿真示意图。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
实施例一
本实施例中提供一种基于多物理场耦合的微镜芯片设计分析方法,包括:
请参阅图1,本发明提供的一种基于力-电-声多物理场耦合的MOEMS微镜芯片设计分析方法,包括以下步骤:
步骤S1:建立力矩和偏转角度的映射关系,通过对梳齿单元进行计算近似周期边界条件处理得到力矩和偏转角度的映射关系。
图2本发明MOEMS微镜芯片的梳齿单元结构示意图,该方法使用到的硅基驱动器模型可动梳齿长为270um,厚为5um,高为50um,其中La=50um,Lb=270um,Lc=45um,h=50um。
由图3可知对应梳齿的力矩和偏转角度的映射关系。
步骤S2:建立单轴静电驱动器模型的三维几何结构,对简单的单轴静电驱动器先进行电学稳态分析,再进行力学稳态分析,得到对应电压下的机械偏转角度;
步骤201:建立单轴静电驱动器模型的三维几何结构,包括设置三维几何结构梳齿的尺寸,之后对三维几何结构进行六面体网格剖分处理,并对部分位置进行网格加密处理,得到物理模型的六面体单元信息。
具体的,六面体单元信息包括六面体单元体心坐标信息、面心坐标信息、角点坐标信息等。
步骤202:进行电学稳态分析,构建单轴静电驱动器模型的稳态电学方程。其中静电场方程为:
其中,D表示电位移矢量,E表示电场强度,V表示电势,ρ
步骤203:提取出对应电压下的静电力矩,将静电力分布在梳齿部分,对单轴静电驱动器模型进行力学稳态分析,并得到旋转微镜的机械偏转角度。具体的,力学方程为:
其中,
步骤S3:将该最大机械偏转角度与力电耦合运算得到的机械偏转角度进行对比,验证是否正确。
步骤301:构建单轴静电驱动器模型的多物理耦合方程,并得到旋转微镜的机械偏转角度。对其设置的多物理场耦合方程包括静电场方程和力学方程。其中静电场方程为:
其中,D表示电位移矢量,E表示电场强度,V表示电势,ρ
具体的,力学方程为:
其中,
具体的,将静电场方程和力学方程进行联立可得:
其中,D表示电位移矢量,E表示电场强度,V表示电势,ρ
步骤302:将多物理场耦合运算得到的旋转微镜机械偏转角度与步骤2中所得到的机械偏转角度进行对比,验证可靠性。
步骤S4:对复杂的双轴可调微镜静电驱动器进行自主三维建模,进行自适应网格剖分,该剖分方式采用非软件自适应剖分的方法。
具体的,建立双轴可调微镜静电驱动器单位几何结构,包括设置三维几何结构的梳齿尺寸和厚度,之后对三维几何结构进行六面体网格剖分处理,并对旋转轴部位进行细致化处理。
步骤S5:对双轴可调微镜静电驱动器进行静电物理场稳态分析运算,得到对应电压下梳齿的电荷分布情况和双轴的力矩大小。具体的,静电场方程为:
其中,D表示电位移矢量,E表示电场强度,V表示电势,ρ
通过该静电场方程的运算,分别得到快、慢轴方向不同电压下的静电力矩大小。
步骤S6:对双轴可调微镜静电驱动器添加热黏性声学多物理场,使用有限元方法对模型进行固体力学和热黏性声学多物理场耦合的频域运算,得到对应电压和压强下,机械偏转角度,并与实际测试数据进行对比。
所述热黏性声学方程为:
ρ
其中,ρ
所述频域分析力学方程为:
其中,ρ表示密度,u表示空间位置,
具体的,将热黏性声学方程和力学方程进行联立可得:
其中,ρ
以上所述,仅为本申请较佳的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应该以权利要求的保护范围为准。
- 一种微流控芯片和基于该芯片的肿瘤转移模型及模型构建方法和应用
- 一种基于多物理场框架的堆芯物理-热工耦合模拟方法
- 一种基于多物理场框架的堆芯物理-热工耦合模拟方法