一种四旋翼式火星飞行器及正立展开与平台起飞部署装置
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及一种飞行器及正立展开与平台起飞部署装置,属于航天飞行器技术领域。
背景技术
由于火星地表整体为沙丘,沙丘上遍布砾石,火星车的勘探范围与勘探效率受到地形的严重限制与影响。而火星飞行器可在空中飞行,执行勘探任务,勘探范围更广,勘探效率更高,为火星车提供所勘探到的信息。并且现已证实火星旋翼飞行器的可行性。
四旋翼式火星飞行器操纵简单,结构稳定,但结构整体尺寸大,结构不紧凑。为满足航天器发射要求,需要对火星飞行器进行折展,减小整体包络尺寸,使结构紧凑,承载能力强。
在展开完成后,需要对火星飞行器进行部署,两者相互协调配合,尽量以简单结构完成部署工作。但目前没有合适的四旋翼式火星飞行器结构、折展及部署方案。
发明内容
本发明为解决目前没有适合四旋翼式火星飞行器结构、折展及部署方案的问题,进而提出一种四旋翼式火星飞行器及正立展开与平台起飞部署装置。
本发明为解决上述问题采取的技术方案是:本发明包括着陆器、外包络组件、底部伸展部件、多自由度机械臂和火星飞行器;底部伸展部件和多自由度机械臂并排安装在着陆器上,外包络组件安装在底部伸展部件上,火星飞行器设置在外包络组件内。
进一步的,外包络组件包括外包络盖、外包络壳、包带、多个火工品和抬升装置;抬升装置安装在外包络壳内,火星飞行器设置在抬升装置上,外包络盖盖装在外包络壳顶部的开口处,且外包络盖的边缘通过多个火工品与外包络壳顶部开口处的边缘连接,包带安装在外包络壳的底部。
进一步的,底部伸展部件包括三级伸缩臂、二级伸缩臂、一级伸缩臂、一级牵引绳、驱动电机和二级牵引绳;三级伸缩臂的后端由前至后插入二级伸缩臂的前端内,二级伸缩臂的后端由前至后插入一级伸缩臂的前端内,一级伸缩臂的后端与着陆器固定连接,驱动电机固定安装在三级伸缩臂内,一级牵引绳的一端绕过三级伸缩臂上的定滑轮后固定在二级伸缩臂的后端,一级牵引绳的另一端缠绕在驱动电机的电机轴上,二级牵引绳的一端固定在二级伸缩臂上,二级牵引绳的另一端固定在三级伸缩臂上,二级牵引绳的中部绕过二级伸缩臂上的定滑轮,外包络组件安装在三级伸缩臂的前端。
进一步的,底部伸展部件还包括多个导向轮;三级伸缩臂与二级伸缩臂之间通过多个导向轮滑动连接,二级伸缩臂与一级伸缩臂之间通过多个导向轮滑动连接。
进一步的,火星飞行器包括太阳能电池板、机身、四个旋翼臂、四个锁紧连杆组件、四组桨叶、采样机构、四个推进电机和四个桨叶夹;太阳能电池板安装在机身的顶部,采样机构安装在机身的底部,四个旋翼臂均布设置在机身的四周,每个旋翼臂的内端通过铰链与机身连接,旋翼臂的内端通过锁紧连杆组件与机身贴合在一起,每个旋翼臂的外端固定安装一个推进电机,推进电机的电机轴上安装一组桨叶,每组桨叶通过桨叶夹绑定在一起。
进一步的,火星飞行器还包括四个支撑腿和四个轮组部件;四个支撑腿呈矩形分布设置在机身的底部,每个支撑腿的上端与机身的下表面连接,每个支撑腿的下端安装一个轮组部件。
本发明的有益效果是:本发明提出了四旋翼式火星飞行器折展方案,折展后外包络尺寸小,折展操作简单稳定;同时提出了平台起飞部署方案,降低了飞行器部署的难度与所需结构的复杂程度,对火星飞行器折展及起飞部署等具有重要意义。
附图说明
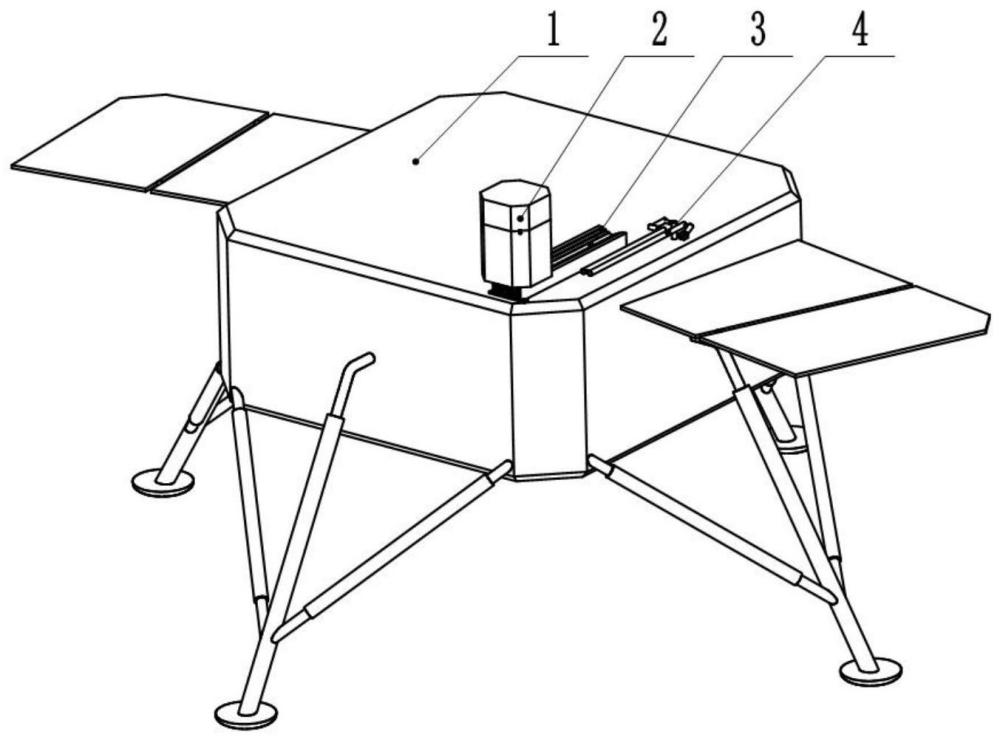
图1是本发明的整体结构示意图;
图2是在外包络部件内火星飞行器折叠结构剖视图;
图3是外包络壳体及抬升装置三维示意图;
图4是四旋翼式火星飞行器折叠结构三维示意图;
图5是底部伸展部件三维示意图;
图6是着陆器及飞行器初始状态三维示意图;
图7是包络盖去除状态三维示意图;
图8是包络整体向外伸展状态三维示意图;
图9是火星飞行器向上抬升状态三维示意图;
图10是火星飞行器正立展开完成状态三维示意图;
图11是火星飞行器起飞准备状态三维示意图;
图12是火星飞行器飞行状态三维示意图
具体实施方式
具体实施方式一:结合图1说明本实施方式,本实施方式所述一种四旋翼式火星飞行器及正立展开与平台起飞部署装置包括着陆器1、外包络组件2、底部伸展部件3、多自由度机械臂4和火星飞行器5;底部伸展部件3和多自由度机械臂4并排安装在着陆器1上,外包络组件2安装在底部伸展部件3上,火星飞行器5设置在外包络组件2内。
多自由度机械臂4固定端与着陆器1完成连接固定,用于火工品2-4爆炸后,拿掉外包络盖2-1。
具体实施方式二:结合图2和图4说明本实施方式,本实施方式所述一种四旋翼式火星飞行器及正立展开与平台起飞部署装置的外包络组件2包括外包络盖2-1、外包络壳2-2、包带2-3、多个火工品2-4和抬升装置2-5;抬升装置2-5安装在外包络壳2-2内,火星飞行器5设置在抬升装置2-5上,外包络盖2-1盖装在外包络壳2-2顶部的开口处,且外包络盖2-1的边缘通过多个火工品2-4与外包络壳2-2顶部开口处的边缘连接,包带2-3安装在外包络壳2-2的底部。
外包络组件2底部连接部分与底部伸展部件3中三级伸缩臂3-1通过包带2-3完成连接固定,如遇到意外情况,包带2-3整体解除约束,多自由度机械臂4拿掉外包络部件2及内部火星飞行器5整体。
抬升装置2-5为同轴伸缩筒式结构,与火星飞行器5中机身5-2进行连接,可使火星飞行器5实现高度抬升。外包络盖2-1与外包络壳体2-2内部具有多处形约束,用于完成火星飞行器5中太阳能电池板5-1,桨叶5-5,旋翼臂5-3及轮组部件5-8的压紧固定约束。火星飞行器5中桨夹5-10上外伸短杆与外包络壳体2-2侧面上竖直滑道进行连接,完成飞行器抬升过程中的导向。
其它组成及连接关系与具体实施方式一相同。
具体实施方式三:结合图5说明本实施方式,本实施方式所述一种四旋翼式火星飞行器及正立展开与平台起飞部署装置的底部伸展部件3包括三级伸缩臂3-1、二级伸缩臂3-2、一级伸缩臂3-3、一级牵引绳3-4、驱动电机3-5和二级牵引绳3-7;三级伸缩臂3-1的后端由前至后插入二级伸缩臂3-2的前端内,二级伸缩臂3-2的后端由前至后插入一级伸缩臂3-3的前端内,一级伸缩臂3-3的后端与着陆器1固定连接,驱动电机3-5固定安装在三级伸缩臂3-1内,一级牵引绳3-4的一端绕过三级伸缩臂3-1上的定滑轮后固定在二级伸缩臂3-2的后端,一级牵引绳3-4的另一端缠绕在驱动电机3-5的电机轴上,二级牵引绳3-7的一端固定在二级伸缩臂3-2上,二级牵引绳3-7的另一端固定在三级伸缩臂3-1上,二级牵引绳3-7的中部绕过二级伸缩臂3-2上的定滑轮,外包络组件2安装在三级伸缩臂3-1的前端。
一级伸缩臂3-3上外伸四处固定端,与着陆器1通过螺栓完成连接固定。三级伸缩臂3-1、二级伸缩臂3-2与一级伸缩臂3-3间通过多处导向轮3-6形成移动副,可向外伸展。驱动电机3-5固定在三级伸缩臂3-1内部,一级牵引绳3-4绕过三级伸缩臂3-1上定滑轮,一端固定在二级伸缩臂3-2末端,另一端绕在驱动电机3-5处。驱动电机3-5转动,一级牵引绳3-4长度减少,带动二级伸缩臂3-2向外伸展。二级牵引绳3-7一端固定在二级伸缩臂3-2,另一端固定在三级伸缩臂3-2,中间绕过二级伸缩臂3-2上的定滑轮,在二级伸缩臂3-2向外伸展过程中,二级伸缩臂3-2上的定滑轮向外移动,则带动三级伸缩臂3-1向外伸展。最终效果为驱动电机3-5转动,带动二级伸缩臂3-2向外伸展,二级伸缩臂3-2同步带动三级伸缩臂3-1向外伸展。
其它组成及连接关系与具体实施方式一相同。
具体实施方式四:结合图5说明本实施方式,本实施方式所述一种四旋翼式火星飞行器及正立展开与平台起飞部署装置的底部伸展部件3还包括多个导向轮3-6;三级伸缩臂3-1与二级伸缩臂3-2之间通过多个导向轮3-6滑动连接,二级伸缩臂3-2与一级伸缩臂3-3之间通过多个导向轮3-6滑动连接。其它组成及连接关系与具体实施方式三相同。
具体实施方式五:结合图3说明本实施方式,本实施方式所述一种四旋翼式火星飞行器及正立展开与平台起飞部署装置的火星飞行器5包括太阳能电池板5-1、机身5-2、四个旋翼臂5-3、四个锁紧连杆组件5-4、四组桨叶5-5、采样机构5-6、四个推进电机5-9和四个桨叶夹5-10;太阳能电池板5-1安装在机身5-2的顶部,采样机构5-6安装在机身5-2的底部,四个旋翼臂5-3均布设置在机身5-2的四周,每个旋翼臂5-3的内端通过铰链与机身5-2连接,旋翼臂5-3的内端通过锁紧连杆组件5-4与机身5-2贴合在一起,每个旋翼臂5-3的外端固定安装一个推进电机5-9,推进电机5-9的电机轴上安装一组桨叶5-5,每组桨叶5-5通过桨叶夹5-10绑定在一起。
火星飞行器5折叠后,收拢至外包络部件2内,完成固定。太阳能电池板5-1及采样机构5-6均与机身5-2进行固定连接,旋翼臂5-3及支撑腿5-7与机身5-2通过转动副完成连接固定,关节处均有涡卷弹簧用于提供回复力。锁紧连杆组件5-4一端与旋翼臂5-3连接,另一端与机身5-2连接,用于旋翼臂5-3展开后的锁定。桨叶5-5通过螺栓与桨夹5-10完成连接,此处未进行周向固定,具有转动副,在推进电机5-9开始转动后,两片桨叶5-5会因离心力变为共线。桨夹5-10与推进电机5-9连接后,整体与旋翼臂5-3完成连接固定。轮组部件5-8与支撑腿5-7通过螺栓完成连接固定,连接处具有转动副。为了折叠,轮组部件5-8整体转动后,抵在外包络壳体侧表面。在展开过程中,重新转动至原位置。
其它组成及连接关系与具体实施方式一相同。
具体实施方式六:结合图5说明本实施方式,本实施方式所述一种四旋翼式火星飞行器及正立展开与平台起飞部署装置的火星飞行器5还包括四个支撑腿5-7和四个轮组部件5-8;四个支撑腿5-7呈矩形分布设置在机身5-2的底部,每个支撑腿5-7的上端与机身5-2的下表面连接,每个支撑腿5-7的下端安装一个轮组部件5-8。其它组成及连接关系与具体实施方式五相同。
结合图6至图12说明本发明的工作原理
本发明的展开与部署过程如下:着陆器1到达指定位置后,外包络部件2中火工品2-4爆炸后,外包络盖2-1与外包络壳体2-2间变为可分离状态,多自由度机械臂4将外包络盖2-1取下,去除部分形约束。底部伸展部件3中驱动电机3-5转动,通过一级牵引绳3-4、导向轮3-6、二级牵引绳3-7及定滑轮3-8,使二级伸缩臂3-2及三级伸缩臂3-1同时向着陆器1外伸展。火星飞行器5及外包络壳体2-2等随三级伸缩臂3-1向外伸展。外包络部件2中抬升装置2-5带动火星飞行器5向上抬升。在抬升过程中,桨夹5-10外伸短杆与外包络壳体2-2侧面滑道间形约束及轮组部件5-8与外包络壳体2-2斜侧面间形约束起到导向作用。当抬升至形约束不起作用时,轮组部件5-8由于涡卷弹簧弹力,转动至指定角度,完成展开。旋翼臂5-3同样由于涡卷弹簧弹力,转动至指定角度,锁紧连杆组件5-4完成锁紧。此时火星飞行器正立展开完成,推进电机5-9通过桨夹5-10带动桨叶5-5转动,为飞行器提供升力,完成火星飞行器5与抬升装置2-5的分离,完成平台起飞部署。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质,在本发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。
- 四旋翼飞行器矢量控制方法及四旋翼飞行器
- 一种四旋翼式火星飞行器的火星地表起飞部署装置
- 一种四桨叶四旋翼式火星飞行器及折叠约束与展开解锁装置