一种基于多压电协同摩擦的高速缓冲器与控制方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明属于航天器着陆缓冲技术领域,尤其涉及一种基于多压电协同摩擦的高速缓冲器与控制方法。
背景技术
本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
随着航天器返回与着陆与空间对接任务的增多,尤其是对无损着陆的需求增大,对航天器着陆缓冲技术和功能提出了更高的要求。
由于传统着陆机构不具备可重复使用、柔顺着陆及可调姿等功能,无法适应未来星表探测任务的多元性和灵活性,难以满足未来繁重的星表大范围多点探测、物资转运、基地建造等任务的要求。为此,只能不断发射探测器开展小范围探测任务,因此,如何开展加速度曲线更柔顺、可重复使用、可移动以及可全地形适应的着陆机构构型设计及其控制方法研究,成为未来航天器着陆机构研制所面临的巨大挑战。
发明内容
为克服上述现有技术的不足,本发明提供了一种基于多压电协同摩擦的高速缓冲器,该高速缓冲器能较好地解决现有航天器着陆装备中缺乏相应的可重复着陆与柔顺缓冲控制的问题,不但可以实现柔顺缓冲控制,还可以完成多次可重复着陆,提高着陆精度与工作效率,完全满足了航空航天领域缓冲着陆过程对可重复着陆柔顺缓冲机构及控制方法的要求。
为实现上述目的,本发明的一个或多个实施例提供了如下技术方案:
第一方面,公开了一种基于多压电协同摩擦的高速缓冲器,包括:
同步旋转机构及缓冲机构;
所述同步旋转机构包括推拉杆、滑动机构、丝杆及主轴;
所述缓冲机构包括:压电陶瓷、摩擦块及摩擦驱动轮;
在执行缓冲作业时,所述推拉杆受到轴向压力时带动滑动机构做直线滑动,继而所述滑动机构带动丝杆旋转,将旋转扭矩传递到主轴和摩擦驱动轮;
通过控制所述压电陶瓷的输出信号,控制摩擦块与摩擦驱动轮之间的摩擦力大小,进而实对摩擦驱动轮的转速控制。
作为进一步的技术方案,还包括壳体和端盖,所述壳体和端盖通过固定螺栓安装在一起,形成一个密封的腔体结构;
所述壳体及端盖分别设置有轴承孔;
所述同步旋转机构及缓冲机构均安装在腔体结构上。
作为进一步的技术方案,所述缓冲机构为四套:
4套压电陶瓷圆周分布;4套压电定位安装盖板通过固定螺栓圆周安装在壳体上的安装孔内;
4对精密直线轴承圆周安装在壳体上的安装孔内;
每个摩擦块上安装有两套精密光轴,并确保精密光轴轴线与摩擦块接触面的垂直度;
4套摩擦块通过安装的精密光轴穿过精密直线轴承,实现4套摩擦块能够自由滑动。
作为进一步的技术方案,精密光轴另一端穿过压电定位安装盖板并且通过弹簧定位销将摩擦块复位弹簧串联安装在一起;
作为进一步的技术方案,每套所述缓冲机构中通过紧定螺栓调节好摩擦块与摩擦驱动轮之间的预紧力。
作为进一步的技术方案,所述主轴中段采用花键结构;
所述摩擦驱动轮一端通过陶瓷球角接触轴承和电磁制动器安装在壳体上的轴承孔内;
所述主轴的一端连接至滑动机构;
所述主轴的另一端与端盖上的轴承孔内部的陶瓷球角接触轴承紧密配合。
作为进一步的技术方案,还包括旋转固定螺栓,所述旋转固定螺栓与主轴配合,借助驱动电机对陶瓷球角接触轴承进行轴向限位。
作为进一步的技术方案,所述摩擦驱动轮上的花键键槽与主轴中段采用花键结构配合安装在一起,所述摩擦驱动轮一端通过主轴的轴肩定位,另一端通过轴向定位挡圈与陶瓷球角接触轴承的配合实现定位。
作为进一步的技术方案,所述丝杆通过丝杆定位套与主轴连接在一起,且确保丝杆安装端与主轴同轴。
作为进一步的技术方案,还包括外管,所述外管通过螺栓与壳体连接,且保证轴心同轴;
滑动导轨通过螺栓固定在外管内壁上,且保持平直状态。
作为进一步的技术方案,所述滑动机构包括滑块及丝杠螺母,所述推拉杆在直线轴承内推动滑块和丝杠螺母沿着滑动导轨做直线滑动。
第二方面,公开了一种基于多压电协同摩擦的高速缓冲器的缓冲方法,包括:
在执行缓冲作业时,所述推拉杆受到轴向压力时带动滑动机构做直线滑动,继而所述滑动机构带动丝杆旋转,将旋转扭矩传递到主轴和摩擦驱动轮;
通过控制所述压电陶瓷的输出信号,控制摩擦块与摩擦驱动轮之间的摩擦力大小,进而实对摩擦驱动轮的转速控制。
以上一个或多个技术方案存在以下有益效果:
本发明的所述推拉杆穿过直线轴承,能保持自由滑动,且另一端与滑块固定连接在一起,实现对推拉杆周向限位,确保推拉杆只能完成直线伸缩运动。
本发明的所述丝杠螺母的内滑道与丝杆外表面紧密配合,丝杠螺母的外部安装孔通过螺栓与滑块紧密连接在一起,丝杠螺母快速直线运动过程,通过与丝杆的螺旋面接触配合,将直线运动转化成摩擦驱动轮的旋转运动,实现缓冲位移放大,便于开展摩擦缓冲过程控制。
本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
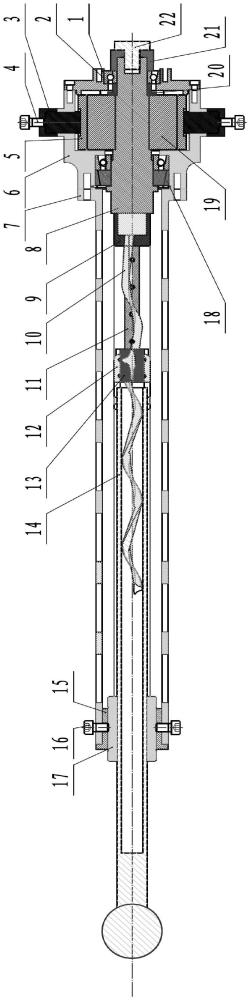
图1是本实施例子机械装配系统剖视图;
图2是本实施例子基于多压电摩擦缓冲原理图;
图3是本实施例子球状结构示意图;
图中各标号:
1-端盖、2-陶瓷球角接触轴承、3-压电、4-紧定螺栓、5-摩擦块、6-主机壳体、7-外管、8-主轴、9-丝杆定位套、10-丝杆、11-滑动导轨、12-滑块、13-丝杠螺母、14-推拉杆、15-固定内套、16-定位销轴、17-直线轴承、18-电磁制动器、19-摩擦驱动轮、20-轴向定位挡圈、21-驱动电机、22-旋转固定螺栓、23-弹簧定位销、24-摩擦块复位弹簧、25-精密直线轴承、26-压电定位安装盖板.27-精密光轴、28-稳定固定螺栓、29-球状结构。
具体实施方式
应该指出,以下详细说明都是示例性的,旨在对本发明提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。
在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
实施例一
如图1和图2所示,本实施例公开了一种基于多压电协同摩擦的高速缓冲器,主要由直线运动转旋转运动机构和压电摩擦缓冲-驱动机构组成;
直线运动转旋转运动机构包括外管(7)、主轴(8)、丝杆定位套(9)、丝杆(10)、滑动导轨(11)、滑块(12)、丝杠螺母(13)、推拉杆(14)、固定内套(15)、定位销轴(16)、直线轴承(17)。
压电摩擦缓冲-驱动机构包括:端盖(1)、陶瓷球角接触轴承(2)、压电(3)、紧定螺栓(4)、摩擦块(5)、主机壳体(6)、电磁制动器(18)、摩擦驱动轮(19)、轴向定位挡圈(20)、驱动电机(21)、旋转固定螺栓(22)、弹簧定位销(23)、摩擦块复位弹簧(24)、精密直线轴承(25)、压电定位安装盖板(26)、精密光轴(27)、稳定固定螺栓(28)、球状结构(29)。
具体的,壳体(6)和端盖(1)通过固定螺栓安装在一起,形成一个密封的腔体结构;摩擦驱动轮(19)一端通过陶瓷球角接触轴承(2)和电磁制动器(18)安装在主机的壳体(6)上的轴承孔内,主轴的一端与丝杆(10)同轴固定连接在一起,主轴(8)另一端与端盖(1)轴承孔内部的陶瓷球角接触轴承(2)紧密配合,例如采用过盈配合的方式安装在一起。
上述电磁制动器(18)用于锁住整个机构运动,与摩擦驱动轮及陶瓷球角接触轴承同轴安装。
腔体结构内部是便于形成一个圆柱形腔体空间,并在内部安装摩擦块(5)和摩擦驱动轮(19),外部结构与外管(7)和四套压电定位安装盖板(26)安装连接在一起,材料采用的是铝合金材质,如6063或7075等硬质铝合金。
旋转固定螺栓(22)与主轴(8)螺纹连接配合,借助驱动电机(21)实现对陶瓷球角接触轴承(2)的轴向限位。旋转固定螺栓(22)与(8)通过螺纹连接在一起,(22)的突出部分会限制(22)轴向移动。
主轴(8)中段采用花键结构,摩擦驱动轮(19)上的花键键槽与主轴(8)中段采用花键结构配合安装在一起,摩擦驱动轮(19)一端通过主轴(8)的轴肩定位,一端通过轴向定位挡圈(20)与陶瓷球角接触轴承(2)的配合实现定位,即限制该零件的自由度,使其不能轴向移动。
摩擦驱动轮(19)一端通过主轴(8)的轴肩定位,即安装到与轴肩位置接触,确保摩擦驱动轮(19)在主轴(8)上的定位。
外管(7)通过螺栓连接与主机壳体(6)连接在一起,且保证整个机构传动系统都是轴心同轴。
丝杆(10)通过丝杆定位套(9)与主轴(8)连接在一起,且确保丝杆(10)安装端与主轴(8)同轴,提高丝杆(10)的安装精度。在本实施例子中保持较高的同轴度精度才能实现结构的运动精度。
滑动导轨(11)通过螺栓固定在外管(7)内壁上,且保持平直状态;安装过程需要不断校正轨道直线度,并将滑块(12)安装在滑动导轨(11),能实现快速自由滑动。
丝杠螺母(13)的内滑道与丝杆(10)外表面紧密配合,丝杠螺母(13)的外部安装孔通过螺栓与滑块(12)紧密连接在一起。
固定内套(15)通过定位销轴(16)固定安装在外管(7)最外端,而且将直线轴承(17)固定在固定内套(15)的内孔中。
推拉杆(14)穿过直线轴承(17),能保持自由滑动,且另一端与滑块(12)固定连接在一起,实现对推拉杆(14)周向限位,确保推拉杆(14)只能完成直线伸缩运动。
每个摩擦块(5)上安装有两套精密光轴(27),并确保精密光轴(27)轴线与摩擦块(5)接触面的垂直度。
4套压电定位安装盖板(26)通过16个稳定固定螺栓(28)圆周安装在主机壳体(6)上的安装孔内。
4对精密直线轴承(25)圆周安装在主机壳体(6)上的安装孔内,4套摩擦块(5)通过上面安装的精密光轴(27)光轴穿过精密直线轴承(25),实现4套摩擦块(5)能够自由滑动。
精密光轴(27)另一端穿过压电定位安装盖板(26)并且通过弹簧定位销(23)将摩擦块复位弹簧(24)串联安装在一起。
4套压电陶瓷(3)圆周分布,安装4套压电定位安装盖板(26)与摩擦块(5)之间,并通过紧定螺栓(4)调节好摩擦块(5)与摩擦驱动轮(19)之间的预紧力,便于开展摩擦力精准控制。
通过上述具体结构的安装方式均是为了保证结构的运动稳定性与运动精度,进而确保缓冲器运动可靠。
采用本实施例的缓冲着陆装置,结构设计合理,作业质量好,作业可靠,通用化程度高,完全满足了是未来航天器新型着陆机构柔顺着陆动力学控制理论研究的关键,为工程目标的转化提供技术和装备保障。
实施例二
本实施例的目的是提供一种基于多压电协同摩擦的高速缓冲器的缓冲方法,包括:
在执行缓冲作业时,所述推拉杆受到轴向压力时带动滑动机构做直线滑动,继而所述滑动机构带动丝杆旋转,将旋转扭矩传递到主轴和摩擦驱动轮;
通过控制所述压电陶瓷的输出信号,控制摩擦块与摩擦驱动轮之间的摩擦力大小,进而实对摩擦驱动轮的转速控制。
具体的,该装置工作过程中,当基于多压电协同摩擦的高速缓冲器开展缓冲作业时,首先,电磁制动器(18)通电松开对主轴(8)的抱死锁定状态,同时压电陶瓷(3)开始供电;当推拉杆(14)端部的球状结构(29)受到轴向压力(参见附图3所示),由推拉杆(14)在直线轴承(17)内快速推动滑块(12)和丝杠螺母(13)沿着滑动导轨(11)做直线滑动,此时,由于丝杠螺母(13)与丝杆(10)采用的双螺旋大导程结构配合,丝杠螺母(13)的直线运动,带动丝杆(10)开始旋转,进而将旋转扭矩传递到主轴(8)和摩擦驱动轮(19)的同步旋转;4套压电陶瓷(3)开始工作,通过输入特定的控制电压信号,驱动4套压电陶瓷(3)输出特定的力和位移,推动各自的摩擦块(5)与摩擦驱动轮(19)接触,通过控制压电陶瓷(3)的信号即控制电压信号,控制摩擦块(5)与摩擦驱动轮(19)之间的摩擦力大小,进而实对摩擦驱动轮(19)的转速控制,进而实现柔顺缓冲控制,缓冲过程结束后,此时电磁制动器(18)断电,电磁制动器(18)锁定主轴(8)现有位置,所有压电陶瓷(3)断电,各个摩擦块(5)和压电陶瓷(3)在各自摩擦块复位弹簧(24)的作用下,完成复位,压电陶瓷(3)断电,进而完成一次柔顺缓冲着陆任务。
特定的控制电压信号,驱动4套压电陶瓷(3)输出特定的力和位移,例如:反馈的加速度与多个力传感器信号通过权重算法得到的多传感器融合后的控制信息控制压电信号。
如需可重复着陆,此时电磁制动器(18)通电松开对主轴(8)的抱死锁定状态,给驱动电机(21)输入控制信号旋转带动主轴(8)和丝杆(10)同步转动,进而推动丝杠螺母(13)和滑块(12)带动推拉杆(14)在直线轴承(17)内快速推动到初始位置,完成动推拉杆(14)的复位,此时电磁制动器(18)和驱动电机(21)断电,完成复位运动。确保本发明中基于多压电协同摩擦的高速缓冲器与精密控制方法可以更好的提高可重复着陆柔顺缓冲控制。
本发明的丝杠螺母的内滑道与丝杆外表面紧密配合,丝杠螺母的外部安装孔通过螺栓与滑块紧密连接在一起,丝杠螺母快速直线运动过程,通过与丝杆的螺旋面接触配合,将直线运动转化成摩擦驱动轮的旋转运动,实现缓冲位移放大,便于开展摩擦缓冲过程控制,以实现柔顺缓冲控制。本发明较好地解决现有航天器着陆装备中缺乏相应的可重复着陆与柔顺缓冲控制的问题,不但可以实现柔顺缓冲控制,还可以完成多次可重复着陆,提高着陆精度与工作效率,完全满足了航空航天领域缓冲着陆过程对可重复着陆柔顺缓冲机构及控制方法的要求。
通过上述技术方案实现了对的航天器重复柔顺着陆缓冲技术和功能进行了拓展,以适应未来繁重的星表大范围多点探测、物资转运、基地建造等要求。
本发明达到了较好地解决现有技术中缺乏相应的柔顺缓冲与可重复着陆的问题,不但可以实现高速软着陆,还可以自动现有结构完成多次软着陆,提高了缓冲加速度柔顺性和工作效率。
本发明的4套压电陶瓷(3)和高精度运动控制方法结合,以压电元位置、机构的质量、结构刚度、运动精度、摩擦力和运动空间为输入参数,基于压电摩擦缓冲原理,在多约束条件下控制着陆机构快速高效的实现能量传递与耗能,完成柔顺缓冲。
本发明的4套压电陶瓷(3)圆周分布,4套压电陶瓷(3)采用均值滤波数据反馈和模糊PID控制方法,选取合适的控制律和参数,并且结合电磁制动器(18)一起完成摩擦缓冲与摩擦后的位置锁定工作。
在本实施例子中,通过传感器采集数据传输到数据采集卡,数据采集卡与控制器通信,控制器通过控制算法将各个传感器信号进行融合处理,得到所需的控制信号,控制压电电压,压电执行对应的输出力/位移。
本发明的结构设计合理,作业质量好,作业可靠,通用化程度高,完全满足了航天器着陆缓冲与对接过程对可重复着陆柔顺缓冲机构及控制方法的要求。
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
- 一种基于地基和空基协同感知的高速公路事故监测方法及系统
- 一种基于网络控制的多移动机器人协同控制方法及系统
- 一种基于高速视觉和电参数协同传感控制的高氮钢电弧增材系统及其控制方法
- 一种基于高速视觉和电参数协同传感控制的高氮钢电弧增材系统及其控制方法