一种内镜旋翼刀
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及医疗手术器械技术领域,尤其涉及一种内镜旋翼刀。
背景技术
随着消化内镜技术的发展,内镜下微创手术的适应症不断扩大,ESD(内镜粘膜下剥离术)、EMR(内镜下粘膜切除术)、内镜全层切除术等应用也逐步普及。
现有技术中,内镜微创手术刀的刀头通常采用电切刀,单次切割范围较小,切割效率较低;且常见的切割刀头不具有独立的距离调节功能,当需要调整刀头位置时需要将内镜微创手术刀整体进行位移,增加医护人员的操作难度。
发明内容
针对背景技术存在的不足,本发明的目的在于提供一种内镜旋翼刀。
为实现上述目的,本发明提供了如下技术方案:
一种内镜旋翼刀,包括:
外管体;
刀头,安装于所述外管体的远端,且所述外管体的远端内部设有第一扣槽,所述刀头外侧至少设有一组呈对称布置且可扣接于所述第一扣槽的第一弹扣,且所述刀头内侧设有插接槽,所述插接槽内壁设有第二扣槽;
驱动组件,滑动设于所述外管体内,所述驱动组件的输出轴插接于所述插接槽内,所述输出轴至少设有一组呈对称布置且可扣接于所述第二扣槽的第二弹扣;
若干刀片,枢接于所述刀头,所述刀头与刀片之间设有复位弹簧,当所述输出轴抵接于所述刀片位于所述插接槽内的一端时,各所述刀片展开呈水平状态;当所述输出轴未抵接所述刀片位于所述插接槽内的一端时,各所述刀片在弹力作用下收纳呈竖直状态;
调节组件,包括设于所述外管体内的内管体,所述内管体的远端连接于所述驱动组件,通过所述内管体推动或拉回所述驱动组件,使所述输出轴抵接或脱离于各所述刀片,从而使得所述输出轴连接或脱离于所述刀头,并一同推动所述刀头使其脱离所述外管体或拉回所述刀头使其扣接于所述外管体,并通过所述内管体调整所述刀头推出所述外管体的距离。
进一步的,所述第一弹扣沿其滑动方向的前后两侧分别设有第一外斜面和第二外斜面,所述第二弹扣沿其滑动方向的前后两侧分别设有第一内斜面和第二内斜面,所述第一内斜面与所述外管体轴线所形成的锐角角度小于所述第一外斜面与外管体轴线所形成的锐角角度,所述第二内斜面与所述外管体轴线所形成的锐角角度大于所述第二外斜面与外管体轴线所形成的锐角角度。
进一步的,所述第一扣槽为环形槽,使得所述第一弹扣可在所述刀头旋转至任意位置时均扣接于所述第一扣槽内,所述输出轴和插接槽具有相适配的矩形外形。
进一步的,所述刀头外侧设有沿其径向向外延伸的限位部,所述限位部用于抵接所述外管体的孔口处,便于所述输出轴脱离于所述插接槽。
进一步的,所述驱动组件包括底座和固定安装于所述底座的电机,所述底座连接于所述内管体一的远端,且所述底座的侧面设有定定位槽,所述外管体内壁设有与所述定位槽适配的定位筋条。
进一步的,所述外管体的近端设有手柄组件,所述手柄组件设有可旋转的调节螺母和用于控制所述驱动组件输出轴转速的转速调节扭,所述调节螺母螺纹配合于所述内管体的近端,通过旋转所述调节螺母,控制所述驱动组件和刀头的往复滑动。
进一步的,所述外管体的远端设有弯曲部,所述手柄组件安装用于控制所述弯曲部弯曲角度的角度调节器,且所述角度调节器上设置有角度调节钮和角度固定钮。
进一步的,所述外管体的远端设有负压吸引口和注射口,所述手柄组件安装有分别通过导管连接于所述负压吸引口的负压吸引器接口和所述注射口的注射接口。
进一步的,所述外管体的远端处还设有出光口、CCD图像传感器和超声波探头,所述出光口通过光纤连接于冷光源,所述CCD图像传感器连接于显示器。
进一步的,所述刀片的数量为3-5片,各所述刀片呈环形阵列均匀布置于所述刀头外侧,且各所述刀片的另一端呈圆头状,防止所述刀片的头部对患者造成误伤。
本发明的有益效果是:
1、本发明提出的一种内镜旋翼刀,驱动组件在调节组件可沿外管体轴向往复运动,通过内管体推动或拉回驱动组件,使输出轴抵接或脱离于各刀片,从而使得输出轴连接或脱离于刀头,并一同推动刀头使其脱离外管体或拉回刀头使其扣接于外管体,并通过内管体调整刀头推出所述外管体的距离,且当输出轴抵接于刀片位于插接槽内的一端时,各刀片展开,展开的刀片扩大内镜手术装置的切割范围,提高切割效率;当输出轴未抵接所述刀片位于插接槽内的一端时,各刀片在弹力作用下收纳呈竖直状态,使得在无需切割时收起各刀片,降低移动刀片所需的空间;且通过内管体使得刀头具有独立的位移功能,降低手术人员的操作难度。
2、本发明提出的一种内镜旋翼刀,由于第一内斜面与外管体轴线所形成的锐角角度小于第一外斜面与外管体轴线所形成的锐角角度,使得第二弹扣扣接于第二槽口所需的力度小于第一弹扣脱离第一扣槽所需的力度,避免输出轴与刀头完成连接之前,刀头被顶推脱离于外管体;同理,第二内斜面与外管体轴线所形成的锐角角度大于第二外斜面与外管体轴线所形成的锐角角度,使得第一弹扣扣接于第一扣槽所需的力度小于所述第二弹扣脱离第二扣槽所需的力度,避免刀头连接于外管体之前,输出轴脱离于插接槽。
3、本发明提出的一种内镜旋翼刀,第一扣槽为环形槽,使得第一弹扣可在刀头旋转至任意位置时均可扣接于第一扣槽内,输出轴和插接槽具有相适配的矩形外形,便于向刀头传递旋转力矩。
4、本发明提出的一种内镜旋翼刀,外管体的远端设有负压吸引、注射口、出光口以及CCD图像传感器,手柄组件安装有分别通过导管连接于负压吸引口的负压吸引器接口和注射口的注射接口,保证切割位置视野清楚,从而提高手术效率,减少手术时间。
5、本发明提出的一种内镜旋翼刀,各刀片的另一端呈圆头状,防止刀片的头部对患者造成误伤。
附图说明
为了更清楚地说明本例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的一种内镜旋翼刀的示意图;
图2为图1A处局部放大图;
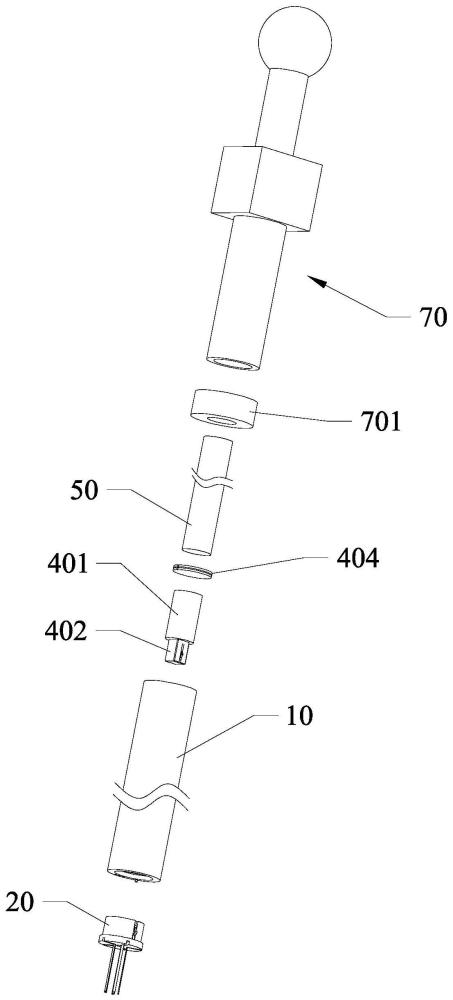
图3为本发明的一种内镜旋翼刀的分解图;
图4为本发明的一种内镜旋翼刀的刀片处于收纳状态示意图;
图5为本发明的一种内镜旋翼刀的刀片处于展开状态示意图;
图6为本发明的一种内镜旋翼刀的复位弹簧状态对应于图4的示意图;
图7为本发明的一种内镜旋翼刀的复位弹簧状态对应于图5的示意图;
图8为本发明的一种内镜旋翼刀的复位弹簧安装示意图;
图9为本发明的一种内镜旋翼刀的刀头示意图;
图10为本发明的一种内镜旋翼刀的刀头正视图;
图11为本发明的一种内镜旋翼刀的刀头剖视图;
图12为本发明的一种内镜旋翼刀的外管体局部剖视图;
图13为本发明的一种内镜旋翼刀的电机示意图;
图14为本发明的一种内镜旋翼刀的电机正式图;
图中,10、外管体;101、第一扣槽;102、定位筋条;20、刀头;201、第一弹扣;2011、第一外斜面;2012、第二外斜面;202、限位部;203、插接槽;204、第二扣槽;205、让位槽;206、第一安装轴;207、第二安装轴;30、刀片;401、电机;402、输出轴;403、第二弹扣;4031、第一内斜面;4032、第二内斜面;404、底座;50、内管体;60、复位弹簧;70、手柄组件;701、调节螺母;801、负压吸引;802、注射口;803、出光口;804、超声波探头。
具体实施方式
下面结合图1-14对本发明进行详细说明。
一种内镜旋翼刀,包括外管体10、刀头20和枢接于刀头20的若干刀片30、输出轴402连接于刀头20的驱动组件以及连接于驱动组件使其往复运动的驱动组件,具体的:
刀头20,安装于外管体10的远端,且外管体10的远端内部设有第一扣槽101,刀头20外侧至少设有一组呈对称布置且可扣接于第一扣槽101的第一弹扣201,且刀头20内侧设有插接槽203,插接槽203内壁设有第二扣槽204。
驱动组件,滑动设于外管体10内,驱动组件的输出轴402插接于插接槽203内,输出轴402至少设有一组呈对称布置且可扣接于第二扣槽204的第二弹扣403。
若干刀片30,枢接于刀头20,刀头20与刀片30之间设有复位弹簧60,该复位弹簧60为扭簧,其两输出端分别抵接于刀头20和刀片30。当输出轴402抵接于刀片30位于插接槽203内的一端时,各刀片30展开呈水平状态;当输出轴402未抵接刀片30位于插接槽203内的一端时,各刀片30位于在弹力作用下收纳呈竖直状态。
调节组件,包括设于外管体10内的内管体50,内管体50的远端连接于驱动组件,通过内管体50推动或拉回驱动组件,使输出轴402抵接或脱离于各刀片30,从而使得输出轴402连接或脱离于刀头20,并一同推动刀头20使其脱离外管体10或拉回刀头20使其扣接于外管体10,并通过内管体50调整刀头20推出外管体10的距离。
因此,驱动组件在调节组件可沿外管体10轴向往复运动,通过内管体50推动或拉回驱动组件,使输出轴402抵接或脱离于各刀片30,从而使得输出轴402连接或脱离于刀头20,并一同推动刀头20使其脱离外管体10或拉回刀头20使其扣接于外管体10,并通过内管体50调整刀头20推出所述外管体10的距离,且当输出轴402抵接于刀片30位于插接槽203内的一端时,各刀片30展开,展开的刀片30扩大内镜手术装置的切割范围,提高切割效率;当输出轴402未抵接所述刀片30位于插接槽203内的一端时,各刀片30位于插接槽203外的一端在弹力作用下相互抵接,使得在无需切割时收起各刀片30,降低移动刀片30所需的空间;且通过内管体50使得刀头20具有独立的位移功能,降低手术人员的操作难度。
本实施例中,刀头20设有设有若干让位槽201,让位槽201的一端与插接槽203连通,让位槽205内设有第一安装轴206和第二安装轴207,刀片30枢接于第一安装轴206,复位弹簧60枢接于第二安装轴207。
本实施例中,第一弹扣201沿其滑动方向的前后两侧分别设有第一外斜面2011和第二外斜面2012,第二弹扣403沿其滑动方向的前后两侧分别设有第一内斜面4031和第二内斜面4032,第一内斜面4031与外管体10轴线所形成的锐角角度小于第一外斜面2011与外管体10轴线所形成的锐角角度,即角A1小于角B1,使得第二弹扣403扣接于第二槽口所需的力度小于第一弹扣201脱离第一扣槽101所需的力度,避免输出轴402与刀头20完成连接之前,刀头20被顶推脱离于外管体10;同理,第二内斜面4032与外管体10轴线所形成的锐角角度大于第二外斜面2012与外管体10轴线所形成的锐角角度,即角A2大于角B2,使得第一弹扣201扣接于第一扣槽101所需的力度小于所述第二弹扣403脱离第二扣槽204所需的力度,避免刀头20连接于外管体10之前,输出轴402脱离于插接槽203。第一扣槽101具有分别与第一外斜面2011和第二外斜面2012适配的斜面,第二扣槽204具有分别与第一内斜面4031和第二内斜面4032适配的斜面。
本实施例中,第一扣槽101为环形槽,使得第一弹扣201可在刀头20旋转至任意位置时均扣接于第一扣槽101内,输出轴402和插接槽203具有相适配的矩形外形。本实施例中,刀头20外侧设有沿其径向向外延伸的限位部202,限位部202用于抵接外管体10的孔口处,便于输出轴402脱离于插接槽203。
本实施例中,驱动组件包括底座404和固定安装于底座404的电机401,底座404连接于内管体50一的远端,且底座404的侧面设有定位槽,外管体10内壁设有与定位槽适配的定位筋条102。
本实施例中,外管体10的近端设有手柄组件70,手柄组件70设有可旋转的调节螺母701和用于控制驱动组件输出轴402转速的转速调节扭,调节螺母701螺纹配合于内管体50的近端,通过旋转调节螺母701,控制驱动组件和刀头20的往复滑动。
本实施例中,外管体10的远端设有弯曲部,手柄组件70安装用于控制弯曲部弯曲角度的角度调节器,且角度调节器上设置有角度调节钮和角度固定钮。弯曲部为常见现有技术,其工作原理为公知常识,此处不再赘述。
本实施例中,外管体10的远端设有负压吸引801口和注射口802,手柄组件70安装有分别通过导管连接于负压吸引801口的负压吸引801器接口和注射口802的注射接口。进一步的,外管体10的远端处还设有出光口803、CCD图像传感器和超声波探头804,出光口803通过光纤连接于冷光源,CCD图像传感器连接于显示器,超声波探头804进一步提高术中的可检查性和分辨力,保证切割位置视野清楚,从而提高手术效率,减少手术时间。
本实施例中,刀片30的数量为3-5片,各刀片30呈环形阵列均匀布置于刀头20外侧,且各刀片30的另一端呈圆头状,防止刀片30的头部对患者造成误伤。
本发明提出的一种内镜旋翼刀,其工作原理如下:
将外管体10伸入到患者体内病患处,旋转调节螺母701通过螺纹配合使得内管体50向前移动,从而推动电机401使得第二弹扣403扣接于第二扣槽204,且输出轴402伸入刀头20的插接槽203的过程中,逐渐抵接于刀片30位于插接槽203内的一端,进而使得刀片30发生旋转,从而展开成水平状态,如图5和图7所示,完成电机401与刀头20的连接;继续旋转调节螺母701,使得内管体50推动刀头20,直至第一弹扣201脱离于第一扣槽101,此时启动电机401,输出轴402即可带动刀头20旋转,通过刀片30对病患处进行切割,切割过程中可正反转调节螺母701,使得刀头20脱离于外管体10的距离可调整。
切割结束后,反转调节螺母701,从而将刀头20收回,使得第一弹扣201扣接于第一扣槽101中,第二弹扣403脱离于第二扣槽204,刀片30在复位弹簧60的弹力作用下,自动收纳呈竖直状态,如图4和图6所示,另外输出轴402不必完全退出插接槽203,只需要第二弹扣403位于插接槽203外即可。
上述实施例只为说明本发明的技术构思及特点,其目的在于让本领域技术人员能够了解本发明内容并加以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
- 一种单旋翼植保无人机旋翼振动实验台
- 一种带翼尖环和可加装翼尖整流罩的旋翼
- 一种飞翼内充氦气的旋翼推进飞行器
- 一种带内旋刀开沟机刀盘