用于诊断继电器的焊接的电路和方法
文献发布时间:2024-04-18 19:48:15
技术领域
本申请要求于2021年12月2日向韩国知识产权局提交的韩国专利申请号10-2021-0170980的优先权,其全部内容通过引用并入本文。
本公开涉及一种继电器焊接诊断电路和继电器焊接诊断方法。
背景技术
电池系统可以包括电池的用于正极端子的继电器和用于负极端子的继电器。当用于正极端子的继电器和用于负极端子的继电器中的至少一个被焊接时,电池系统的可靠性被退化从而对电池性能产生影响。因此,需要诊断电池系统中包括的继电器是否被焊接。
特别地,用于负极端子的继电器可能被连接到接地电平(ground level),这导致难以诊断继电器的焊接。
发明内容
技术问题
本发明致力于提供一种继电器焊接诊断电路和继电器焊接诊断方法,该继电器焊接诊断电路用于通过测量包括电池组的电池系统中的电池组电压来诊断连接到电池组的多个继电器当中的哪个继电器被焊接。
技术方案
本发明的实施例提供一种电池系统,包括:电池组;第一主继电器,该第一主继电器具有连接到电池组的正极端子的第一端;和第二主继电器,该第二主继电器具有连接到电池组的负极端子的第一端;第一控制继电器,该第一控制继电器连接在第一主继电器和逆变器的正极端子之间;和第二控制继电器,该第二控制继电器连接在第二主继电器和逆变器的负极端子之间;焊接诊断电路,该焊接诊断电路包括连接在电池组的正极端子和逆变器的负极端子之间的第一电阻器和第一光电耦合器以及连接在逆变器的负极端子和电池组的负极端子之间的第二电阻器和第二光电耦合器;以及电池管理系统(BMS),该电池管理系统(BMS)用于驱动第一光电耦合器和第二光电耦合器以诊断第二控制继电器的焊接。
在第二控制继电器的断开控制条件下,BMS可以将用于驱动第一光电耦合器的第一控制信号和用于驱动第二光电耦合器的第二控制信号发送到焊接诊断电路,并且当第一光电耦合器和第二光电耦合器根据第一控制信号和第二控制信号被驱动时,可以接收对应于逆变器的负极端子的第一电压信号。
BMS可以基于第一电压信号导出对应于逆变器的负极端子和电池组的负极端子之间的第一电压差。
当第一电压差为跟随电池组的正极端子和电池组的负极端子之间的电池组电压的电压时,BMS可以诊断第二控制继电器没有被焊接。
当第一电压差是预先确定的偏移电压时,BMS可以诊断第二控制继电器被焊接,该预先确定的偏移电压不同于跟随电池组的正极端子和电池组的负极端子之间的电池组电压的电压。
焊接诊断电路可以进一步包括第三电阻器和第三光电耦合器,该第三电阻器和第三光电耦合器连接在逆变器的正极端子和电池组的负极端子之间,并且该BMS可以驱动第三光电耦合器来诊断第一控制继电器的焊接。
在第一控制继电器的断开控制条件下,BMS可以将用于驱动第三光电耦合器的第三控制信号发送到焊接诊断电路并且当第三光电耦合器根据第三控制信号被驱动时可以接收对应于逆变器的正极端子的第二电压信号。
BMS可以基于第二电压信号导出对应于逆变器的正极端子和电池组的负极端子之间的第二电压差。
当第二电压差为跟随电池组的正极端子和电池组的负极端子之间的电池组电压的电压时,BMS可以诊断第一控制继电器被焊接。
当第二电压差为预先确定的偏移电压时,BMS可以诊断第一控制继电器没有被焊接,该预先确定的偏移电压不同于跟随电池组的正极端子和电池组的负极端子之间的电池组电压的电压。
本发明的另一实施例提供了一种用于诊断继电器的焊接的方法,包括:允许BMS基于电池组的正极端子处的电压导出对应于电池组的正极端子与负极端子之间的电压的电池组电压;通过第一电阻器连接电池组的正极端子与逆变器的负极端子之间的间隙;通过第二电阻器连接逆变器的负极端子与电池组的负极端子与之间的间隙;以及当逆变器的负极端子与电池组的负极端子之间的电压为跟随电池组电压的电压时,允许BMS诊断连接在电池组的负极端子与逆变器的负极端子之间的第一控制继电器没有被焊接。
该方法可以进一步包括,当逆变器的负极端子和电池组的负极端子之间的电压是不同于跟随电池组电压的电压的预先确定的偏移电压时,允许BMS诊断第一控制继电器被焊接。
该方法可以进一步包括:通过第三电阻器连接逆变器的正极端子和电池组的负极端子之间的间隙;以及当逆变器的正极端子和电池组的负极端子之间的电压为跟随电池组电压的电压时,允许BMS诊断连接在电池组的正极端子和逆变器的正极端子之间的第二控制继电器被焊接。
该方法可以进一步包括:通过第三电阻器连接逆变器的正极端子和电池组的负极端子之间的间隙;以及当逆变器的正极端子和电池组的负极端子之间的电压为不同于跟随电池组电压的电压的预先确定的偏移电压时,允许BMS诊断连接在电池组的正极端子和逆变器的正极端子之间的第二控制继电器没有被焊接。
有益效果
根据本公开,关于包括电池组的电池系统,提供了继电器焊接诊断电路和继电器焊接诊断方法,该继电器焊接诊断电路用于通过测量电池组电压来诊断连接到电池组的多个继电器当中的哪个继电器被焊接,防止电流在继电器被断开时流动,并且允许安全的电池组管理。
附图说明
图1示出根据实施例的电池系统的示意图。
图2示出根据实施例的包括焊接诊断电路的电池系统的电路图。
图3示出根据实施例的用于诊断第一控制继电器的焊接的方法的流程图。
图4示出根据实施例的用于诊断第二控制继电器的焊接的方法的流程图。
具体实施方式
在下文中,将参考附图详细地描述本说明书中公开的实施例。在本说明书中,相同或相似的组件将由相同或相似的附图标记表示,并且将省略其重复的描述。仅使用在下述描述中使用的用于组件的术语“模块”和“单元”以便于使说明书更容易,并且因此,这些术语本身不具有将它们彼此区分开的含义或作用。在描述本说明书的实施例时,当确定与本发明相关联的公知技术的详细描述可能模糊本发明的要点时,将进行省略。仅提供附图以便于使本说明书中公开的实施例容易理解,而不应被解释为限制本说明书中公开的精神,并且要理解的是,在不脱离本发明的范围和精神的情况下本发明包括所有修改、等效物和替代物。
包括诸如第一、第二等序数的术语将仅用于描述各种组件,而不被解释为限制这些组件。这些术语仅用于将一个组件与其他组件区分开来。
将进一步理解,本说明书中使用的术语“包括”或“具有”指定所陈述的特征、数字、步骤、操作、组件、部件或其组合的存在,但不排除一个或多个其他特征、数字、步骤、操作、组件、部件或其组合的存在或添加。
从根据实施例的配置当中,可以在用于在特定控制条件下控制其他配置的配置中安装利用指令的集合实现的程序,该指令的集合是用于控制其他配置的实施的控制算法。控制配置可以根据安装的程序处理输入数据和存储的数据,并且可以生成输出数据。控制配置可以包括用于存储程序的非易失性存储器和用于存储数据的存储器。
图1至图4示出继电器焊接诊断电路和继电器焊接诊断方法。
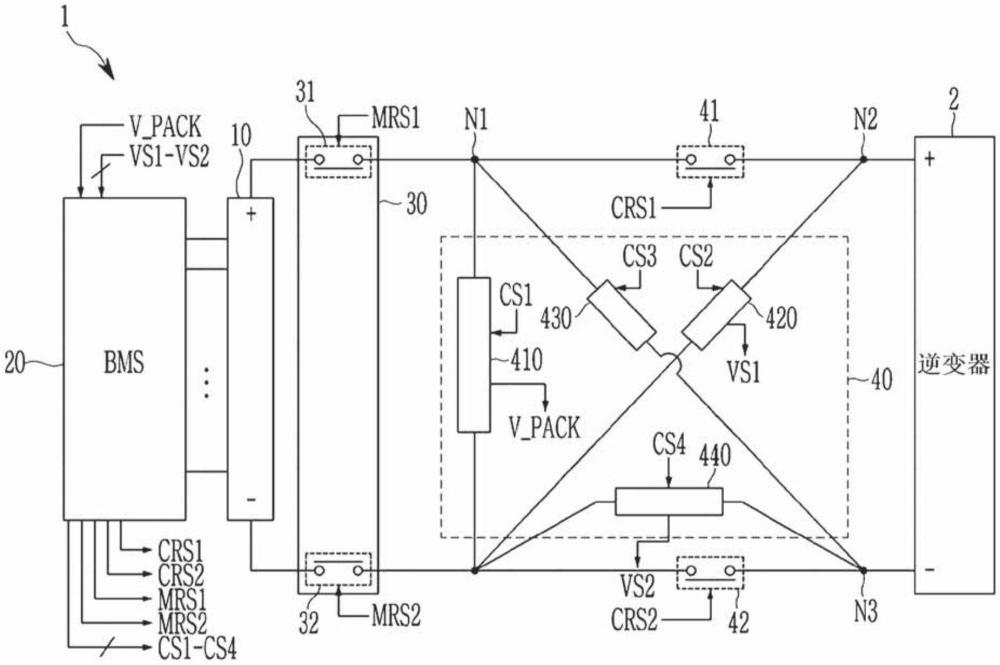
图1示出根据实施例的电池系统的示意图。
电池系统1包括电池组10、电池管理系统BMS20、主继电器30、控制继电器41和42以及焊接诊断电路40。电池系统1可以电连接到逆变器2。
电池组10可以包括彼此电连接的多个电池单体(未示出)。例如,将预先确定的数量的电池单体串联连接以配置电池模块,并且将预先确定的数量的电池模块串联和/或并联连接以供应预期的电力。
主继电器30可以包括第一主继电器31,该第一主继电器31具有连接到电池组10的正极端子的第一端;和第二主继电器32,该第二主继电器32具有连接到电池组10的负极端子的第一端。第一主继电器31和第一控制继电器41之间的节点被称为第一节点N1。第一控制继电器41和逆变器2的正极端子之间的节点被称为第二节点N2。第二控制继电器42和逆变器2的负极端子之间的节点被称为第三节点N3。
第一主继电器31的第二端被连接到第一控制继电器41的第一端,并且第二主继电器32的第二端被连接到第二控制继电器42的第一端。第一控制继电器41的第二端被连接逆变器2的正极端子。第二控制继电器42的第二端被连接到逆变器2的负极端子。
BMS20被连接到包括在电池组10中的电池单体的正电极和负电极。根据由BMS20供应的继电器控制信号MRS1、MRS2、CRS1和CRS2来控制相应的第一主继电器31、第二主继电器32、第一控制继电器41以及第二控制继电器42的闭合(close)和断开(open)。
焊接诊断电路40可以包括多个电阻器箱410、420、430和440。电阻器箱410、420、430和440的操作可以由BMS20供应的多个控制信号CS1至CS4控制。然而,本公开不限于此,并且焊接诊断电路40可以进一步包括用于生成控制信号CS1至CS4的附加控制电路。
第一电阻器箱410被连接在第一主继电器31的第二端和第二主继电器32的第二端之间。第二电阻器箱420被连接在第二主继电器32的第二端和逆变器2的正极端子之间。第三电阻器箱430被连接在第一主继电器31的第二端和逆变器2的负极端子之间。第四电阻器箱440被连接在第二主继电器32的第二端和逆变器2的负极端子之间。
BMS20可以从第一电阻器箱410接收对应于电池组电压的组电压信号V_PACK。电池组电压可以对应于电池组的正极端子和电池组的负极端子之间的电压。BMS20可以从第二电阻器箱420接收对应于逆变器的正极端子和电池组的负极端子之间的电压的第一电压信号VS1。BMS20可以从第四电阻器箱440接收对应于逆变器的负极端子与电池组的负极端子之间的电压的第二电压信号VS2。因为电池组的负极端子处的电压为接地电平,所以电池组电压可以为电池组的正极端子处的电压,逆变器的正极端子和电池组的负极端子之间的电压是逆变器的正极端子处的电压,并且逆变器的负极端子和电池组的负极端子之间的电压是逆变器的负极端子处的电压。
现在将参考图2至图4描述焊接诊断电路和诊断方法,其用于通过闭合和断开第一主继电器31和第二主继电器32以及第一控制继电器41和第二控制继电器42来测量多个电压,并且根据所测量的电压来诊断第一控制继电器41和第二控制继电器42的焊接。
图2示出根据实施例的包括焊接诊断电路的电池系统的电路图。
根据实施例,电池系统1可以包括电池组10、BMS20、主继电器30、第一控制继电器41和第二控制继电器42、焊接诊断电路40、模数转换器ADC 50和隔离器60。电池系统1可以被电连接到逆变器2。BMS20可以包括主控制单元MCU。对图2的配置当中的重复图1的配置的配置的描述对应于图1的配置。
相对于图2中所示的虚线55,被定位在左边的高电压电平(以下称为高压侧)上的配置上的接地HV_GND不同于被定位在右边的低压电平(以下称为低压侧)上的配置上的接地LV_GND。例如,电池组10的负极端子可以被连接到接地HV_GND,并且多个晶体管TR1至TR4的发射极端子可以被连接到接地LV_GND。
焊接诊断电路40可以包括多个电阻器箱410、420、430和440以及多个电阻器R11至R16。第一电阻器箱410可以包括第一电阻器R1、第一光电耦合器PC1和第一晶体管TR1。第一光电耦合器PC1可以包括第一光电晶体管PT1和第一发光二极管PD1。第二电阻器箱420可以包括第二电阻器R2、第二光电耦合器PC2和第二晶体管TR2。第二光电耦合器PC2可以包括第二光电晶体管PT2和第二发光二极管PD2。第三电阻器箱430可以包括第三电阻器R3、第三光电耦合器PC3和第三晶体管TR3。第三光电耦合器PC3可以包括第三光电晶体管PT3和第三发光二极管PD3。第四电阻器箱440可以包括第四电阻器R4、第四光电耦合器PC4和第四晶体管TR4。第四光电耦合器PC4可以包括第四光电晶体管PT4和第四发光二极管PD4。
光电耦合器PC1至PC4隔离高压侧和低压侧。可以通过MCU 210的控制连接或阻断光电耦合器PC1至PC4。
第一晶体管TR1的发射极被连接到接地LV_GND,第一晶体管TR1的集电极被连接到第一发光二极管PD1的第一端,并且由MCU 210供应的第一控制信号CS1可以被输入到第一晶体管TR1的基极。电压VCC可以被输入到第一发光二极管PD1的第二端。第一光电晶体管PT1的第一端被连接第一电阻器R1的第一端,并且第一光电晶体管PT1的第二端被连接到节点N11处的电阻器R11的第一端和ADC 50的输入端。第一电阻器R1的第二端被连接到第一节点N1。电阻器R11的第二端被连接到接地HV_GND。
第二晶体管TR2的发射极被连接到接地LV_GND,第二晶体管TR2的集电极被连接到第二发光二极管PD2的第一端,并且由MCU 210供应的第二控制信号CS2可以被输入到第二晶体管TR2的基极。电压VCC被输入到第二发光二极管PD2的第二端。第二光电晶体管PT2的第一端被连接到第二电阻器R2的第一端,并且第二光电晶体管PT2的第二端被连接到节点N12处的电阻器R12的第一端和ADC 50的输入端。第二电阻器R2的第二端被连接到第二节点N2。电阻器R12的第二端被连接到电阻器R13的第一端,并且预先确定的偏移电压V_OFF可以施加到在其上电阻器R12的第二端被连接到电阻器R13的第一端的节点。电阻器R13的第二端被连接到接地HV_GND。
第三晶体管TR3的发射极被连接到接地LV_GND,第三晶体管TR3的集电极被连接到第三发光二极管PD3的第一端,并且由MCU 210供应的第三控制信号CS3可以被输入到第三晶体管TR3的基极。电压VCC被输入到第三发光二极管PD3的第二端。第三光电晶体管PT3的第一端被连接到第三电阻器R3的第一端,并且第三光电晶体管PT3的第二端被连接到电阻器R14的第一端。第三电阻器R3的第二端被连接到第一节点N1。电阻器R14的第二端被连接到第三节点N3。
第四晶体管TR4的发射极被连接到接地LV_GND,第四晶体管TR4的集电极被连接到第四发光二极管PD4的第一端,并且由MCU 210供应的第四控制信号CS4可以被输入到第三晶体管TR3的基极。电压VCC被输入到第四发光二极管PD4的第二端。第四光电晶体管PT4的第一端被连接到第四电阻器R4的第一端,并且第四光电晶体管PT4的第二端被连接到节点N13处的电阻器R15的第一端和ADC 50的输入端。第四电阻器的第二端被连接到第三节点N3。电阻器R15的第二端被连接到电阻器R16的第一端,并且预先确定的偏移电压V_OFF可以被施加到在其上电阻器R15的第二端被连接到电阻器R16的第一端的节点。电阻器R16的第二端被连接到接地HV_GND。
控制信号CS1至CS4的开启电平(on level)可以是高电平,并且截止电平可以是低电平。也就是说,多个晶体管TR1至TR4可以根据高电平的控制信号CS1至CS4被接通(turnon)以吸收电流,而晶体管TR1至TR4可以根据低电平的控制信号CS1至CS4被关断(turnoff)。
当从MCU 210供应高电平的第一控制信号CS1时,第一晶体管TR1被接通,电流流向第一发光二极管PD1,并且第一发光二极管PD1发射光。根据通过第一发光二极管PD1的发光,第一光电晶体管PT1被接通。当从MCU 210供应高电平的第二控制信号CS2时,第二晶体管TR2被接通,电流流向第二发光二极管PD2,并且第二发光二极管PD2发射光。根据通过第二发光二极管PD2的发光,第二光电晶体管PT2被接通。当从MCU 210供应高电平的第三控制信号CS3时,第三晶体管TR3被接通,电流流向第三发光二极管PD3,并且第三发光二极管PD3发射光。根据通过第三发光二极管PD3的发光,第三光电晶体管PT3被接通。当从MCU 210供应高电平的第四控制信号CS4时,第四晶体管TR4被接通,电流流向第四发光二极管PD4,并且第四发光二极管PD4发射光。根据通过第四发光二极管PD4的发光,第四光电晶体管PT4被接通。
ADC 50可以通过连接到节点N11的输入端接收组电压信号V_PACK,可以从连接到节点N12的输入端接收第一电压信号VS1,并且可以从连接到节点N13的输入端接收第二电压信号VS2。ADC 50可以将接收到的组电压信号V_PACK、第一电压信号VS1和第二电压信号VS2转换成多个数字信号D_V_PACK、D_VS1和D_VS2,并且可以将其发送到隔离器60。
隔离器60可以隔离高压侧和低压侧,并且可以将由ADC 50提供的数字信号D_V_PACK、D_VS1和D_VS2发送到MCU 210。
MCU 210可以基于从隔离器60接收到的数字信号D_V_PACK、D_VS1和D_VS2来诊断第一控制继电器41和/或第二控制继电器42的焊接。
图3示出根据实施例的用于诊断第一控制继电器的焊接的方法的流程图。在图3的阶段S11和S12在进行中时,第一主继电器31和第二主继电器32被闭合。
BMS20可以基于对应于电池组的正极端子处的电压V_PP的组电压信号V_PACK导出电池组电压(S11)。
MCU 210可以生成高电平的第一控制信号CS1以导出电池组电压。其他控制信号CS2至CS4可以是低电平。第一晶体管TR1被高电平的第一控制信号CS1接通以允许电流流动,第一发光二极管PD1发射光,并且第一光电晶体管PT1被接通。当第一光电晶体管PT1被接通时,ADC 50可以接收对应于电池组电压的组电压信号V_PACK。例如,组电压信号V_PACK可以是当电池的正极端子处的电压V_PP被第一电阻器R1和电阻器R11分压时生成的节点N11处的电压。电池负极端子为接地电平,电池组电压跟随电池的正极端子处的电压V_PP。
ADC 50将接收到的组电压信号V_PACK转换为数字信号D_V_PACK,并且可以将其发送到隔离器60。隔离器60可以将接收到的数字信号D_V_PACK发送到MCU 210。MCU 210可以基于数字信号D_V_PACK导出电池组10上的电池组电压。
BMS20可以在第一控制继电器41上的断开条件下基于对应于逆变器的正极端子处的电压V_IP的第一电压信号VS1导出作为逆变器的正极端子和电池组的负极端子之间的电压差的第一电压(S12)。在S12的阶段处,第二控制继电器42可以被断开。在第一控制继电器41的断开条件下,MCU 210供应用于断开第一控制继电器41的控制信号CRS1。
MCU 210可以生成高电平的第二控制信号CS2以导出第一电压。其他控制信号CS1、CS3、CS4可以为低电平。第二晶体管TR2被高电平的第二控制信号CS2接通以允许电流流动,并且当第二发光二极管PD2发射光并且第二光电晶体管PT2被接通时,ADC 50可以接收作为节点N12处的电压的第一电压信号VS1。
ADC 50可以将接收到的第一电压信号VS1转换成数字信号D_VS1,并且可以将其发送到隔离器60。隔离器60可以将接收到的数字信号D_VS1发送到MCU 210。MCU 210可以基于数字信号D_VS1导出第一电压。第一电压可以表示逆变器的正极端子和电池组的负极端子之间的对应电压差。
BMS20可以确定在S12处导出的第一电压是否为跟随电池组电压的电压(S13)。
当在S12处导出的第一电压是跟随电池组电压的电压时,BMS20可以诊断第一控制继电器41被焊接(S14)。
当在第一控制继电器41上的断开条件下,第一控制继电器41被焊接时,节点N2可以被连接到电池组的正极端子,并且节点N12处的电压跟随电池组的正极端子处的电压V_PP。即,当第一控制继电器41被焊接时,电池组的正极端子处的电压V_PP被第二电阻器R2、电阻器R12和电阻器R13分压,并且节点N12处的电压不同于偏移电压。当第一控制继电器41被焊接时,节点N12处的电压可以表达为[等式1]。
[等式1]
这里,V
当在S12处导出的第一电压不是跟随电池组电压的电压时,BMS 20可以诊断第一控制继电器41处于正常状态(S15)。当第一控制继电器41处于正常状态时,节点N2与电池组的正极端子分离,因此节点N12处的电压可以是预先确定的偏移电压V_OFF。当第一控制继电器41没有被焊接时,可以认为第一控制继电器41处于正常状态。
图4示出根据实施例的用于诊断第二控制继电器的焊接的方法的流程图。在图4的阶段S21和S22在进行中时,第一主继电器31和第二主继电器32被闭合。
BMS20可以基于对应于电池组的正极端子处的电压V_PP的组电压信号V_PACK导出电池组电压(S21)。对此的描述对应于在S11的阶段的描述的内容。
BMS20可以在第二控制继电器42的断开条件下基于对应于逆变器的负极端子处的电压V_IN的第二电压信号VS2导出作为电池的负极端子和逆变器的负极端子之间的电压差的第二电压(S22)。在S22的阶段中,第一控制继电器41可以被断开。在第二控制继电器42的断开条件下,MCU 210供应用于断开第二控制继电器42的控制信号CRS2。
因为电池组的负极端子为接地电平,并且逆变器的负极端子为接地电平,所以在第二控制继电器在断开控制条件下被焊接时,在现有技术中难以感测到电池的负极端子与逆变器的负极端子之间的电压差。
在实施例中,电池组的正极端子处的电压V_PP通过第三电阻器箱430被供应到节点N3。与现有技术不同,逆变器的负极端子处的电压V_IN变为跟随电池组的正极端子处的电压V_PP的电平,并且该电平不同于电池组的负极端子处的电压V_PN。也就是说,当第二控制继电器42在断开控制条件下未焊接时,逆变器的负极端子与电池组的负极端子之间的电压差被生成,从而可以基于逆变器的负极端子处的电压V_IN感测到第二控制继电器42的焊接。
MCU 210可以生成高电平的第三控制信号CS3和高电平的第四控制信号CS4以导出第二电压。其他控制信号CS1和CS2可以是低电平。第三晶体管TR3被高电平的第三控制信号CS3接通以允许电流流动,第三发光二极管PD3发射光,并且第三光电晶体管PT3被接通。第四晶体管TR4被高电平的第四控制信号CS4接通以允许电流流动,第四发光二极管PD4发射光,并且第四光电晶体管PT4被接通。当第三光电晶体管PT3和第四光电晶体管PT4被接通时,ADC 50可以接收对应于逆变器的负极端子处的电压V_IN的第二电压信号VS2。
ADC 50可以将接收到的第二电压信号VS2转换成数字信号D_VS2,并且可以将其发送到隔离器60。隔离器60可以将接收到的数字信号D_VS2发送到MCU 210。MCU 210可以基于数字信号D_VS2导出第二电压。第二电压可以表示逆变器的负极端子与电池组的负极端子之间的对应电压差。
BMS20可以确定在S22的阶段处导出的第二电压是否是跟随电池组电压的电压(S23)。
当在S22中导出的第二电压是跟随电池组电压的电压时,BMS20可以诊断第二控制继电器42处于正常状态(S24)。在第二控制继电器42未被焊接时,第二控制继电器42可以处于正常状态。
当第二控制继电器42处于正常状态时,节点N3与电池组的负极端子分离,因此节点N13处的电压可以跟随电池组的正极端子处的电压V_PP。即,当第二控制继电器42处于正常状态时,电池组的正极端子处的电压V_PP被第三电阻器R3、第四电阻器R4、电阻器R14、电阻器R15、和电阻器R16分压,因此节点N13处的电压不同于偏移电压。在第二控制继电器42未被焊接时,可以认为第二控制继电器42处于正常状态。当第二控制继电器42处于正常状态时,节点N13处的电压可以表达为[等式2]。
[等式2]
这里,当第二控制继电器42处于正常状态时,V
当在S22中导出的第二电压不是跟随电池组电压的电压时,BMS 20可以诊断第二控制继电器42被焊接(S25)。
当第二控制继电器42被焊接时,节点N3被连接到电池组的负极端子,并且节点N13处的电压可以是预先确定的偏移电压V_OFF。
图3的阶段S11到S15以及图4的阶段S21至S25可以同时进行,或者可以按照S11至S15并且然后S21至S25的顺序执行,或者反之亦然。
虽然已经结合目前被认为是实际实施例的内容描述了本发明,但是要理解的是,本发明不限于所公开的实施例,但是相反,旨在涵盖包括在所附权利要求的精神和范围内的各种修改和等效部署。
- 一种陶瓷继电器的焊接夹具及陶瓷继电器定位焊接方法
- 用于集成电路封装的引线焊接钎料及其制备方法和应用
- 用于提高焊接强度的高密度集成电路封装及其回流方法
- 用于继电器电路的诊断装置和诊断方法
- 用于继电器的诊断及防反接电路和继电器的控制装置