车轮对准测量系统和方法
文献发布时间:2024-04-18 19:48:15
技术领域
本申请要求于2021年1月11日提交的美国临时申请序列号63/135,882的优先权,其全部内容在此通过引用并入本文。
背景技术
本发明涉及车轮对准测量系统和方法,以及具体地涉及将已知尺寸的光学测量仪附连在车轮组件上并且通过摄像装置进行成像的系统和方法。
在汽车行业中,适当的车辆质量需要在制造期间和随后的车辆使用寿命期间两者都对车轮对准设置进行测量和调整。车辆车轮以及特别地可转向车轮(诸如车辆的前轮)的正确定位和对准需要设置束角、外倾角和后倾角。束角是指车辆的纵向轴线与穿过车轮/轮胎的中心的平面之间的角度,并且束角影响车辆的向前行进和转向。外倾角是车轮轴线在垂直平面内朝向路表面的倾斜度,并且当车轮的顶部朝向车辆的中心倾斜时,外倾角为负值。后倾角是平行于车辆中心线的方向的转向轴线的倾斜度。向车辆的后部倾斜将产生正的后倾角。在车辆的装配和/或维修期间,对车辆车轮(并且特别地可转向车轮)的束角以及外倾角和后倾角进行测量、调整或审计和设置非常重要,这样车辆将正确行驶和转向。
发明内容
本发明提供了一种对车辆上车轮组件的车轮对准特性进行确定的有效且成本有效的方法。
根据本发明的一方面,一种用于对安装在车辆上的车轮组件的对准特性进行确定的系统包括:光学测量仪,该光学测量仪被配置成选择性地附接到车轮组件,其中,光学测量仪包括安装基部,该安装基部具有附连到车轮组件的底侧部,并且该光学测量仪包括具有已知尺寸的测量件。该系统还包括光投射器、数字成像器和控制器,该光投射器被配置成:在光学测量仪附接到车轮组件时光进行投射,所述光被引导到光学测量仪上。该数字成像器被配置成对来自光投射器的且从光学测量仪反射的光进行成像,其中该控制器被配置成基于从光学测量仪反射的经成像的光和测量件的已知尺寸来对距光学测量仪的距离进行计算。
该系统还包括反射器,其中,光投射器被配置成将光投射到反射器处,并且反射器被配置成将光以已知角度引导到光学测量仪处,其中,控制器还被配置成基于已知角度来对距光学测量仪的距离进行计算。在特定的实施方式中,反射器包括可调节反射器(诸如微机电系统(“MEMS”)),由此反射器将光引导到光学测量仪处所采用的已知角度是可变的并且是已知的。根据本发明的另外的方面,由控制器计算出的距光学测量仪的距离包括从光学测量仪到数字成像器的距离。更进一步地,控制器还被配置成基于从数字成像器到反射器的已知距离来对距光学测量仪的距离进行计算。
在光学测量仪的实施方式中,安装基部的底侧部可以粘附性地安装到车轮组件上,其中,安装基部可以包括带部。光学测量仪的测量件的已知尺寸包括测量件的厚度,并且光学测量仪的测量件的已知尺寸还可以包括测量件的宽度和/或测量件的长度。更进一步地,光学测量仪还可以包括设置在测量件与安装基部之间的基板,其中,测量件的已知尺寸包括测量件的从基板的表面到测量件的上表面的厚度。测量件的表面(诸如上表面或另一表面)还可以包括计算机可读代码,以及数字成像器可以被配置成对计算机可读代码进行成像,以使控制器能够确定距光学测量仪的距离。
围绕车轮组件设置的多个光学测量仪可以用于确定多个距离,诸如到位于已知定向的一个或更多个数字成像器的距离,从而可以基于该距离来限定平面,其中该平面表示车轮组件的对准。
一种使用这种系统对车轮组件对准特性进行确定的方法包括:将一个或更多个光学测量仪附连到车轮组件;将来自光投射器的光投射到反射器处;利用反射器将来自光投射器的光引导到光学测量仪处;以及利用数字成像器对从光学测量仪反射的光进行成像。该方法还包括基于从光学测量仪反射的经成像的光和测量件的已知尺寸和反射器的已知角,来利用控制器对距光学测量仪的距离进行计算。
根据本发明的另外的实施方式,一种用于对安装在车辆上的车轮组件的对准特性进行确定的系统包括安装片,该安装片被配置成选择性地附接到车轮组件的车轮,其中,安装片包括设置在该安装片上的多个光学测量仪,每个光学测量仪包括具有已知尺寸的测量件。该系统还包括光投射器、数字成像器和控制器,该光投射器被配置成在安装片被附接到车轮组件的车轮时对光进行投射,所述光被引导到光学测量仪中的一个或更多个光学测量仪上。数字成像器被配置成对来自光投射器的且从光学测量仪反射的光进行成像,其中控制器被配置成基于从光学测量仪反射的经成像的光和测量件的已知尺寸来对距光学测量仪的距离进行计算。在另一方面中,该系统包括反射器以及光投射器,该光投射器被配置成将光投射到反射器处,并且该反射器被配置成将光以已知角度引导到光学测量仪处,其中该控制器还被配置成基于该已知角度来对距光学测量仪的距离进行计算。
根据实施方式的特定方面,安装片包括粘附性地安装在车轮组件的车轮的底侧部,以及安装片还可以包括计算机可读代码。更进一步地,施加机可以用于将安装片施加到车轮组件的车轮上。
一种使用这种系统对车轮组件的对准特性进行确定的方法包括:将具有多个光学测量仪的安装片附连到车轮组件;将来自光投射器的光投射到反射器处;利用反射器将来自光投射器的光引导到光学测量仪处;利用数字成像器对从光学测量仪反射的光进行成像;以及基于从所述光学测量仪反射的经成像的光和测量件的已知尺寸,来利用控制器对距光学测量仪的距离进行计算。
因此,本发明提供了一种用于对安装到车辆的车轮组件的对准进行确定的成本有效并且高效率的系统和方法。本发明的这些和其他目标、优点、目的和特征将在结合附图查看以下说明书时变得明显。
附图说明
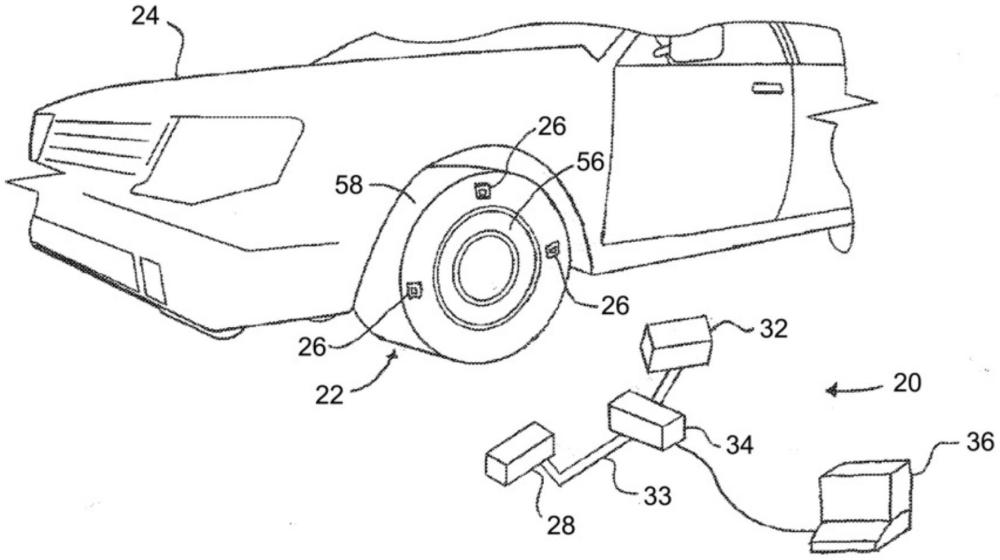
图1是根据本发明的用于对车辆的车轮组件的对准进行确定的系统的透视图;
图2是轮胎和车轮组件的束角的示意图;
图3是轮胎和车轮组件的外倾角的示意图;
图4是图1的车辆的轮胎和光学测量仪附连至其的车轮组件的前视图;
图5是从轮胎和车轮组件移除的图1和图4的光学测量仪的顶视平面图;
图6是图5的光学测量仪的侧视图;
图7是相对于车轮组件所示的系统的俯视平面图;以及
图8是根据本发明的另一方面的用于对车辆的车轮组件的对准进行确定的系统的透视图。
具体实施方式
现在本发明将参照附图进行描述,其中在以下书面说明中的编号元素对应于图中的相同编号元素。如图1的图示的实施方式中所示出的车轮对准测量系统20用于对车辆24的车轮组件22的对准进行测量和/或确定,其中系统20包括:多个光学测量仪26,所述多个光学测量仪26附连到车轮组件22;光投射器28,所述光投射器28将光30投射到可调节反射器32处(图7)以将投射的光30引导到车轮组件22上;以及摄像装置或数字成像器34,所述摄像装置或数字成像器34对来自投射的光30的且从光学测量仪26反射的光35进行成像。在所示的实施方式中,如下面更详细地讨论的,光学测量仪26具有精确已知的尺寸,并且反射器32被配置为微机电系统(“MEMS”)反射器或反射镜,以便能够对在轮胎和车轮组件22上的光学测量仪26进行扫描。基于光学测量仪26的已知尺寸、以及光投射器28和摄像装置34到反射器32的已知定向、以及反射器32的已知的角定向,可以基于光学测量仪26来对从轮胎和车轮组件22到摄像装置34的距离进行精确地确定。通过对到轮胎和车轮组件22上的多个光学测量仪26的距离进行确定,可以确定表示车轮组件22的三维定向并且因此表示车轮组件22的对准的平面。此外,在所示的实施方式中,光学测量仪26以可移除的方式粘附性地附连到车辆24的轮胎和车轮组件22中的每个上,由此系统20提供了用于对车轮组件22的对准进行确定的准确、高效和成本有效的系统。
尽管在图1中,系统20被示出仅与一个车轮组件22相连接,但应当理解,系统20可以与车辆24的光学测量仪26附连至其的车轮组件22的中的每个车轮组件一起使用,以及单独的光投射器28、偏转器32和摄像装置34可以与每个车轮组件一起使用,以及/或者可以在车辆24的车轮组件22中的一个或全部处使用多个光投射器28、偏转器32和/或摄像装置34。更进一步地,光投射器28、偏转器32和摄像装置34可以通过框架或固定装置33以已知的定向保持在一起。如从图1另外理解的,系统20可以附加地包括一个或更多个计算机或控制器36,用于对来自一个或更多个摄像装置34的数据进行处理,以对车轮组件22的对准特性进行确定,车轮组件22的对准特性例如包括诸如如图2和图3所示的束角38和外倾角40的对准特性,以及车轮组件22的中心。更进一步地,对针对车辆22任一侧上的每个车轮组件22的给定轴线的平面进行确定可以附加地包括对车辆中心线或对称轴线进行确定。例如,针对在车辆24的任一侧上的车轮组件22采用单独的光投射器28、偏转器32和摄像装置34可以另外使得能够确定车辆中心线或对称轴线。
如从图5至图7所理解的,在所示的实施方式中的光学测量仪26包括测量件42、基板44和安装基部或条带,该安装基部或条带被配置为具有胶粘底侧部的带部46,用于以可移除的方式粘附或粘贴到车轮组件22。测量件42被构造成对于测量件42的高度或厚度具有精确已知尺寸,其中高度或厚度由图6和图7中的参考字母“A”表示,并且测量件42可以包括对于测量件42的宽度W和/或长度L的精确已知的尺寸。测量件42附加地包括压印在测量件42的顶表面50上或附连到测量件42的顶表面50的代码48,诸如计算机可读代码、诸如条形码。如下面更详细地讨论的,系统20能够基于测量件42的精确已知尺寸来对从车轮组件22到摄像装置34的距离进行确定。基板44提供了用于支撑测量件42并且建立从测量件42的顶表面50到基板44的表面52的高度A的表面。带部46反过来具有用于将光学测量仪26固定到车轮组件22的粘合剂或胶粘底侧部54。应当理解,图5和图6所示的实施方式可以不是按比例的。也就是说,例如,测量件42可以被构造为较薄的部件,这种较薄地部件本身是带状构件,或者甚至是具有不同轮廓的替代构件。同样地,基板44可以更薄。
如图1和图4所理解的,光学测量仪26被附连在车轮组件22周围的不同位置处,其中车轮组件22包括车轮56和轮胎58。在所示的实施方式中,三个光学测量仪26被示出为围绕轮胎58的部分附连。为了限定一个平面,可以使用三个或更多个光学测量仪26。光学测量仪26的放置优选地在车轮组件22的共同方面或特征处或在车轮组件22的共同方面或特征上进行。例如,如从图4和图7所理解的,光学测量仪26被对准成以便全部设置在轮胎58的凸起区域处。然而,可替代地,光学测量仪26可以放置在车轮56和/或轮胎58上的不同位置处,诸如轮辋特征处或其他位置。
现在将参照图7更详细地讨论系统20的操作。如图所示,在所示实施方式中被构造为激光投射器的光投射器28将光30投射到反射器32处。反射器32被配置为MEMS反射镜或反射器,由此角度是以可调节的方式受控的并且是精确已知的。反射器32由此能够将光引导到车轮组件22上,以及特别地反射器32能够将光引导到光学测量仪26上。在一个实施方式中,对反射器32进行操作以调整光学测量仪26上光栅图案的反射的角度,以便由此对光学测量仪26进行扫描。然后由摄像装置34捕获来自光学测量仪26的反射光35,摄像装置34在所示的实施方式中被配置为成像传感器,诸如数字CMOS光电传感器阵列等。光学测量仪26的扫描可以用于形成光学测量仪26的三维模型,以及特别地光学测量仪26的扫描可以用于形成测量件42的三维模型。
基于光学测量仪26的已知尺寸、以及特别地测量件42的已知尺寸、以及光投射器28和摄像装置34到反射器32的已知定向、以及反射器32的已知角定向,可以基于光学测量仪26来对从轮胎和车轮组件22到摄像装置34的距离进行准确地确定。特别地,如先前标注的,光学测量仪26的测量件42的尺寸A是非常精确地已知的,并且图7中从摄像装置34到反射器32的距离B同样是非常精确的已知的(包括对于温度变化的情况而言亦是如此)。如标注的,角度C是可调节的以允许扫描,其中角度是非常精确地已知的。然后,基于由摄像装置34捕获的A的实时观测来求解距离D以确认D,距离D是从测量件42的顶表面50开始的。特别地,基于光源28、摄像装置34、反射器32和车轮组件22上的光学测量仪26的三角关系连同光学测量仪26的已知尺寸来求解距离D。因此,距离D是从光学测量仪26(诸如从测量件42的顶表面50)到摄像装置34的距离,并且因此距离D表示到车轮组件22的距离。
应进一步理解,可以将由摄像装置34捕获到的实时观测提供至计算机36,用于确定距离D,包括对于位于车轮组件22上的每个光学测量仪确定距离D,以由此对表示车轮组件22的三维方向的平面进行确定,并且因此对车轮组件22的对准进行确定。此外,计算机36可以接收由其他摄像装置34捕获的车辆24的车轮组件22中的每个车轮组件处的实时观察。应当理解,对于每个车轮组件22,可以具有单个光源28、反射器32和摄像装置34,或者在每个车轮组件22处可以具有这些部件中的一个或更多个部件中的多个部件。
在本发明的另外的方面中,标注的计算机可读代码48可以用于对对准进行确定的过程和方法相关的各个方面。例如,可以读取代码48,诸如经由摄像装置34和通过计算机36读取代码48,诸如经由反射光35读取代码,其中代码48必须在使得能够求解出距离D之前首先被读取,其中,代码48可以提供对其是被提供用于与系统20结合使用的真实光学测量仪26的确认,诸如由系统20的制造商提供的真实光学测量仪26的确认。因此,代码48可以用作解锁或启用计算机36内的软件的使用的工具或代码,诸如用于求解D和/或对车轮组件22的对准进行确定的三角函数基本软件代码。此外,每个光学测量仪26可以具有其自己的唯一代码,该代码被配置成使得能够单一使用光学测量仪26。以这种方式,例如,具有四个车轮组件22并且每个车轮组件22使用三个光学测量仪26的车辆22将使用12个单独的光学测量仪26用于对车辆22的车轮组件22中的每个车轮组件的对准进行确定。例如,单一使用可以包括在车辆维修厂的对准设置过程期间对对准进行确定。然后,随后的对准确定(诸如对于另一车辆)可能需要使用新的光学测量仪26。
现在参照图8,公开了用于对车辆24的车轮组件22的对准进行测量和/或确定的系统120的另一实施方式,其中系统120与系统20共有相似之处,相似特征用相似的参考数字标识,但在系统120的参考数字上添加了“100”。由于相似性,本文将并非讨论系统120的特征和功能的所有。
系统120包括支撑在安装基部或安装片146上的多个光学测量仪126,安装基部或安装片146应用于车轮组件22的车轮56的外表面,并且应用于车轮组件22的车轮56的外表面上方,其中在所示的实施方式中,安装基部146被配置为可以附连至车轮56的较大的胶粘带。以与系统20类似的方式,光投射器28将光30投射到可调节反射器32处,以将投射的光30引导到光学测量仪126上,并且摄像装置或数字成像器34对投射的光30中从光学测量仪26反射出的光35进行成像(见图1)。粘合剂安装片146由此既起到抑制对车轮组件22的车轮56的损坏的保护层的作用(其有利之处在于车辆24通常可以设置有昂贵的车轮56,昂贵的车轮56需要被保护以免受维修和/或维持运行期间的损坏),又起到将光学测量仪126放置在可控的定向中以用于对车轮组件22的对准定向进行确定的作用。
在所示实施方式中,光学测量仪126具有精确已知的尺寸,并且反射器32被配置为微机电系统(“MEMS”)反射器或反射镜,以便能够对轮胎和车轮组件22的车轮56上的光学测量仪126进行扫描。光学测量仪126包括基板144和测量件142。与光学测量仪26一样,基于测量件142的已知尺寸、以及光投射器28和摄像装置34到反射器32的已知定向、以及反射器32的已知角定向,可以基于光学测量仪126来对从轮胎和车轮组件22(特别地车轮56)到摄像装置34的距离进行精确地确定。在所示的实施方式中,在安装片146上设置有三个光学测量仪126,使得通过对安装片146到多个光学测量仪126的距离进行确定,可以确定表示车轮56的三维定向,并且因此表示车轮组件22的三维定向的平面,这反过来对应于车轮组件22的对准。应当理解,粘合剂安装片146可以应用于车辆24的轮胎和车轮组件22的每个车轮56,并且在给定的安装片146上可以设置有多于三个光学测量仪126。更进一步地,安装片146可以包括计算机可读代码148,该计算机可读代码由摄像装置34进行成像和/或由控制器36进行读取,以使得能够使用对准确定软件,以便使得能够单一使用对准确定软件,由此对于每个车轮组件22必须使用支撑新的光学测量仪的新的安装片146。
在特定的实施方式中,提供了机器或组件160,用于将安装片146应用于车轮组件22的车轮56。在这样的实施方式中,机器160被配置成将安装片146施加到每个轮56,其中安装片146可以是单独的安装片146或者可以是多个安装片146的卷。安装片146可以在整个下表面上或仅在部分上包括胶粘或粘合剂,例如在安装片146的下表面的外部周边部分处或在安装片146的下表面的外部周边部分上。
在不偏离本发明的原则的情况下,可以对具体描述的实施方式进行更改和修改,本发明的原则旨在仅受所附权利要求的范围的限制,如根据包括等效原理的专利法原理所解释的。
- 一种用于车轮的测力装置、测力系统和测量车轮力的方法
- 车轮对准测量系统和方法
- 车辆车轮对准测量系统相机和ADAS校准支撑结构