人体装配型传感器装置、传感器插入装置以及传感器插入方法
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及例如测定生物体内的糖、氨基酸等的浓度的生物体传感器、将该生物体传感器插入到患者的皮下的装置。
背景技术
以往的人体装配型传感器装置的结构为具备以下部分的结构,即被插入到人体的传感器;装配该传感器,并装配于人体的皮肤上的安装单元;和电子单元,该电子单元被装配于该安装单元,与所述传感器电连接,根据从所述传感器输入的信号计算生物体信息的控制部。
用户将安装单元装配于皮肤,在使用传感器插入装置通过该安装单元的开口将传感器插入到人体之后,将电子单元装配于安装单元,从而成为了将电子单元和传感器进行电连接的结构(例如,参照专利文献1)。
此外,作为将传感器插入到人体的传感器插入装置的一例,公开了在将传感器内包于针的状态下对人体穿刺,此后通过弹簧力仅拔出针的穿刺机构的结构(例如,参照专利文献2)。
此外,用于针的穿刺、拔去的穿刺机构中存在通过由与卜触发按钮连动的联结机构构成的结构(例如,参照专利文献3)。
此外,公开了对用于针的穿刺、拔去的机构使用了螺旋弹簧的结构(专利文献4)。
在先技术文献
专利文献
专利文献1:美国专利第8801611号说明书
专利文献2:美国专利第9402544号说明书
专利文献3:美国专利申请公开第2013/0267811号说明书
专利文献4:国际公开第2017/187943号
发明内容
上述以往的人体装配型传感器装置的课题在于难以装配于人体。
即,以往的人体装配型传感器装置通过在用户将传感器插入到人体之后,将电子单元装配于安装单元,从而将电子单元与传感器进行了电连接。在装配传感器的部位为不能看到的位置(例如上臂部的外侧等)的情况下,难以看到安装单元以及传感器,因而试探着将电子单元装着到安装单元以及传感器。
此外,即使在能看到的位置装配电子单元的情况下,需要用手捏着较小的电子单元装着到安装单元以及传感器,因此将人体装配型传感器装置装配于人体是困难的。
因而,本发明的目的在于使人体装配型传感器装置向人体的装配变得容易。
而且为了实现该目的,本发明的人体装配型传感器装置具备:传感器,至少一部分被插入到人体,且具有第一连接端子;安装单元,配置有所述传感器的至少所述第一连接端子的一部分,并被装配于人体的皮肤上;电子单元,具有与所述传感器的所述第一连接端子连接的第二连接端子和取得来自所述传感器的信号的控制部;和装配机构,在相对所述安装单元能转动所述电子单元的状态下连结,并对所述安装单元装配所述电子单元。装配机构形成:在第一连接端子与第二连接端子被连接前的状态下使安装单元与电子单元装配的第一状态;和在第一连接端子与第二连接端子已被连接的状态下使安装单元与电子单元装配的第二状态。
(发明效果)
根据本发明的结构,在将传感器插入到人体之后,电子单元经由装配机构从第一状态转移至第二状态而被装配于安装单元,因而能够容易地进行人体装配型传感器装置对人体的装配。
附图说明
图1为本发明的一实施方式的持续血糖测定(CGM)装置的使用图。
图2为图1的持续血糖测定(CGM)装置的使用图。
图3的(a)为图1的持续血糖测定(CGM)装置的上表面图。图3的(b)为其立体图。
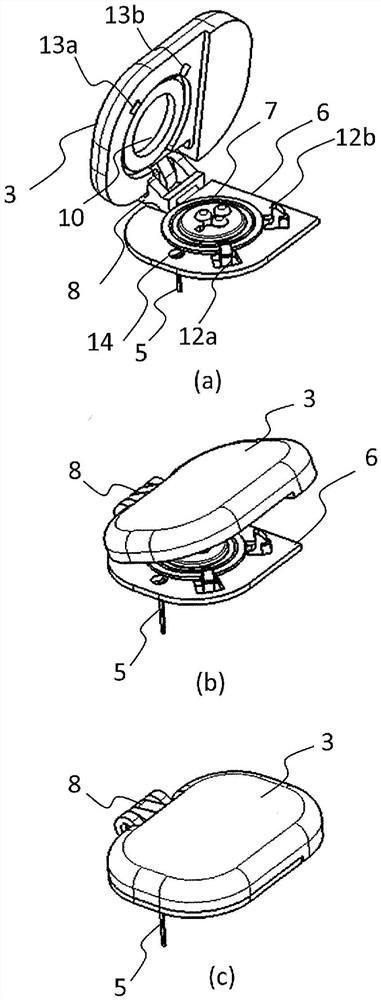
图4的(a)为图1的持续血糖测定(CGM)装置的立体图。图4的(b)为其立体图。图4的(c)为其立体图。
图5的(a)为图1的持续血糖测定(CGM)装置的上表面图。图5的(b)为其立体图。
图6的(a)为图1的持续血糖测定(CGM)装置的立体图。图6的(b)为其立体图。图6的(c)为其立体图。
图7的(a)为图1的持续血糖测定(CGM)装置的上表面图。图7的(b)为其立体图。
图8的(a)为图1的持续血糖测定(CGM)装置的立体图。图8的(b)为其立体图。图8的(c)为其立体图。
图9为图1的持续血糖测定(CGM)装置的主要部位的功能模块图。
图10为本发明的一实施方式的传感器插入装置的使用图。
图11为本发明的一实施方式的传感器插入装置的使用图。
图12为本发明的一实施方式的传感器插入装置的使用图。
图13的(a)为传感器插入装置的立体图。图13的(b)为其立体图。
图14的(a)~图14的(d)为本发明的一实施方式的传感器插入装置的迁移图。
图15的(a)~图15的(d)为本发明的其他实施方式的传感器插入装置的迁移图。
图16为本发明的一实施方式的持续血糖测定(CGM)装置的传感器插入方法的流程图。
图17的(a)为图1的持续血糖测定(CGM)装置的放大图。图17的(b)为(a)的铰接部分的放大图。
具体实施方式
(实施方式1)
<持续血糖测定装置(CGM)装置的结构>
以下,作为本发明的一实施方式所涉及的持续血糖测定(CGM)系统的一例,针对适用于测定葡萄糖的葡萄糖传感器的情况,采用附图进行说明。
持续血糖测定(CGM)系统以糖尿病患者为对象持续地测定血糖值。
另外,在以下的说明中,所谓“下”意味着对患者进行穿刺的穿刺方向上的穿刺侧(针突出的一侧),所谓“上”意味着与穿刺侧相反的一侧(穿刺旋钮侧)。
<人体装配型传感器装置1的概要说明>
图1表示本实施方式中的持续血糖测定(CGM)系统的人体装配型传感器装置1。
持续血糖测定(CGM)系统的人体装配型传感器装置1将传感器5(参照图2等)留置于糖尿病患者的上臂部2的皮下,使用该传感器5连续地测定皮下组织的间质液中的葡萄糖浓度。
本实施方式中的人体装配型传感器装置1将葡萄糖浓度变换为电流值并进行计算,发送该值。在人体装配型传感器装置1中,例如按每1分测定电流值,计算规定次数量的加法平均,并将该值记录于存储器中。而且,人体装配型传感器装置1通过将例如每隔1分钟所取得的5个样本量的值的加法平均的值存储于存储器中,从而每次存储5个葡萄糖浓度的值。
如图1所示,人体装配型传感器装置1通过大致长椭圆形状的电子单元3在与测定装置4之间经由无线进行发送接收。
人体装配型传感器装置1使电子单元3从传感器5接收到的电流值或者基于电流值计算得到的葡萄糖浓度的值存储于存储器中,将存储于存储器中的值经由无线发送到测定装置4。另外,所发送的值可以为电流值,也可为被换算为葡萄糖浓度的值。测定装置4根据在传感器5中读取的值计算葡萄糖浓度,将该计算结果与时间信息一起进行显示,并且使时间信息和葡萄糖浓度存储于测定装置4内的存储器中。
通过上述那样的血糖值的测定持续地实施3天到14天左右,从而能够掌握糖尿病患者的经过24时间的血糖值的变动。因而,能够基于血糖值的变动对应各个糖尿病患者的症状而进行更适当的治疗。
进而,能够采用该血糖值的变动信息,计算对患者给予的胰岛素的量和定时。在胰岛素泵与人体装配型传感器装置1(以及/或者与测定装置4)无线连接的状态下,实时地监控患者的血糖值并给予适当的胰岛素量。由此,能够实现人工胰腺的功能,因而能进行理想的血糖值的控制。
图2中表示装配有人体装配型传感器装置1的糖尿病患者的上臂部2的部分的剖视图。
在人体装配型传感器装置1中,传感器5从与上臂部2抵接的下表面侧突出。而且,在人体装配型传感器装置1被装配于人体的状态下,传感器5被留置于皮下。
为了传感器5容易插入糖尿病患者的皮下,前端部分成为针状或者棒状,其长度约为1cm。传感器5的前端部分透过吸收作为被验物质的葡萄糖,被由使该葡萄糖与酵素反应而生成测定物质的保护膜以及酵素层、介体层等构成的反应层覆盖。
而且,在反应层的下方设置有电化学地测定葡萄糖的电极。通过在皮下扎刺的状态下,将该前端部分留置于间质液内,从而能够观察(以及/或者,测定·检测)皮下组织的间质液的葡萄糖浓度。
在测定上述那样的皮下组织的葡萄糖的皮下留置型葡萄糖传感器中,有时在血中的血糖值与测定结果之间产生时差。因而,有时需要采用自己血糖测定(SMBG)的葡萄糖传感器的测定值进行补正。
在人体装配型传感器装置1被装配于人体时,在皮肤上配置安装单元6。传感器5经由连接端子被装配于安装单元6。而且,在安装单元6装配有电子单元3。电子单元3与传感器5经由安装单元6被连接。
<人体装配型传感器装置1的结构>
以下,对本发明的一实施方式所涉及的人体装配型传感器装置1的结构进行说明。
图3的(a)表示人体装配型传感器装置1的上表面图,图3的(b)表示其立体图。
人体装配型传感器装置1如图3的(a)以及图3的(b)所示,具备传感器5、安装单元6、电子单元3和铰接机构(装配机构)8。
传感器5至少一部分被插入到人体,具有传感器连接端子(第一连接端子)7。
安装单元6配置有传感器5的至少传感器连接端子7的一部分,并且,被装配于人体的皮肤上。
电子单元3具有与传感器5的传感器连接端子7连接的第二连接端子10和取得来自传感器5的信号的控制部20(参照图9)。
为了使电子单元3相对安装单元6转动,切换使电子单元3相对于安装单元6彼此的面接近而对置配置的抵接状态和非抵接状态而设置铰接机构8。而且,铰接机构8形成使安装单元6和电子单元3在连接传感器连接端子7和第二连接端子10之前的状态下装配的第一状态、和安装单元6和电子单元3在连接了传感器连接端子7和第二连接端子10的状态下装配的第二状态。
此外,如图3的(b)所示,铰接机构8设置为连结电子单元3和安装单元6的各个端部。进而,铰接机构8能自由安装拆卸地连结电子单元3和安装单元6。
另外,在铰接机构8所产生的连结被解除的状态下,铰接机构8被分离为电子单元3侧的铰接构件8a和安装单元侧的铰接构件8b。而且,通过铰接构件8a的突起插入被铰接构件8b的插入口,从而构成使电子单元3相对安装单元6转动的铰接机构8。
此外,铰接构件8a的突起通过铰接构件8b的插入口而两端被轴支承,从而将突起作为转动轴,铰接构件8a相对铰接构件8b进行转动。由此,电子单元3在相对安装单元6能开闭的状态下被装着。
在电子单元3的底面侧设置有嵌入传感器连接端子7的一部分的插入口9。插入口9中设置有与传感器连接端子7连接的第二连接端子10。
在插入口9的周缘设置有作为防水构件的O型圈11。O型圈11被配置为在电子单元3与安装单元6互相面对面地结合的状态下,被夹于电子单元3与安装单元6之间。由此,O型圈11作为纺织水浸入传感器连接端子7以及第二连接端子10的防水机构发挥功能。
进而,人体装配型传感器装置1为了保持电子单元3与安装单元6被结合的状态(第二状态),还具备固定电子单元3与安装单元6的锁定机构12、13。锁定机构12、13具有在安装单元6侧设置的卡扣(snap fit)12a、12b和在电子单元3侧设置的插入口13a、13b。在电子单元3与安装单元6被相互结合的状态下,卡扣12a与插入口13a、卡扣12b与插入口13b分别进行嵌合。其结果是,维持电子单元3与安装单元6的结合状态。
安装单元6的底面成为被装配于上臂部2等的皮肤的粘结面。在安装单元6的底面设置例如皮肤胶带等粘结材料以使得对皮肤的粘结变得容易。而且,在结合锁定机构12、13时,需要从上方朝向下方施加力。因而,通过在结合锁定机构12、13时对下方施加力,从而安装单元6的底面被按压到进行装配的皮肤。其结果,人体装配型传感器装置1相对于上臂部2的皮肤被更可靠地装配。
图4的(a)以及图4的(b)表示电子单元3与安装单元6经由铰接机构8被相互结合的过程。
电子单元3与安装单元6在经由铰接机构8能转动的状态下被连结。
而且,在电子单元3的第二连接端子10与安装单元6的传感器连接端子7被连接的情况下,通过以铰接机构8的铰接构件8a的突起的部分作为支点,使电子单元3转动从而结合两者。
在此,将以铰接机构8的铰接构件8a的突起作为中心而安装单元6与电子单元3构成的角度定义为转动角度。
图4的(a)表示电子单元3与安装单元6的转动角度为约90度的状态(非装配状态)。图4的(b)表示电子单元3与安装单元6的转动角度为约30度的状态(非装配状态)。这些非装配状态为电子单元3与安装单元6通过铰接机构8被连结,并且传感器连接端子7与第二连接端子10还未连接的状态。该状态被定义为第一状态。
而且,图4的(c)表示电子单元3与安装单元6的转动角度成为0度,电子单元3与安装单元6被完全地结合的状态(装配状态)。在该装配状态下,传感器连接端子7与第二连接端子10被连接。该状态被定义为第二状态。
如上所述,电子单元3与安装单元6通过铰接机构8被相互连结。而且,铰接机构8形成:在与传感器5连结的传感器连接端子7和设置于电子单元3侧的第二连接端子10被连接前的状态下,使安装单元6与电子单元3相互装配的第一状态。
该第一状态为如图4的(a)以及图4的(b)所示,传感器连接端子7与第二连接端子10被相互连接前的状态。
进而,铰接机构8形成:在与传感器5连结的传感器连接端子7和设置于电子单元3侧的第二连接端子10已被连接的状态下,使安装单元6与电子单元3装配的第二状态。
如图4的(c)所示,该第二状态为传感器连接端子7与第二连接端子10被相互连接的状态。
如上所述,在本实施方式中,铰接机构8能够形成:在传感器连接端子7与第二连接端子10被连接前的状态下使安装单元6与电子单元3相互装配的第一状态;和在传感器连接端子7与第二连接端子10已被连接的状态下使安装单元6与电子单元3相互装配的第二状态,因而在能够容易地进行人体装配型传感器装置1对人体的装配。
即,在将传感器5插入到人体之后,通过经由铰接机构8使电子单元3相对于安装单元6转动的简单的操作,从第一状态转移到第二状态,而电子单元3被装配于安装单元6,因而能够容易地进行人体装配型传感器装置1对人体的装配。
由此,装配传感器的部位即使为不能看到的位置(例如,上臂部2的外侧等),也能通过经由铰接机构8使电子单元3转动的简单的操作使电子单元3装配于安装单元6,连接传感器连接端子7与第二连接端子10。其结果,能够容易地进行人体装配型传感器装置1对人体的装配。
此外,安装单元6与电子单元3在经由铰接机构8而能相互转动的状态下被连结,因而不需要用手捏着较小的电子单元3,装着于安装单元6以及传感器5。其结果是,能够容易地进行人体装配型传感器装置1对人体的装配。
进而,在铰接机构8中设置有弹簧等的弹性体(未图示)。弹簧等的弹性体对电子单元3在相对接近安装单元6的方向上施力。
由此,如图4的(b)所示,在使用者不用手操作的状态下,人体装配型传感器装置1的电子单元3也相对于安装单元6通过弹性体的弹簧力进行转动,成为几乎关闭的状态。
其结果是,使用者仅仅用手指将电子单元3向上方轻轻推压,就能成为如图4的(c)所示,电子单元3被装配于安装单元6的状态。在该情况下,对人体装配型传感器装置1从上方朝向下方施加负载,因而安装单元6的底面被按压在所装配的皮肤。其结果,人体装配型传感器装置1能相对上臂部2的皮肤更可靠地被装配。
此外,如图4的(b)所示,电子单元3覆盖在安装单元6上配置的传感器连接端子7,因而能够防止使用者错误地用手指触碰传感器连接端子7以及设置于电子单元3的底面的第二连接端子10。
另外,弹性体也可为设置于铰接机构的扭簧,也可为板簧。
进而,在安装单元6的传感器5的上方设置有用于将传感器5穿刺到人体,并通过用于进行插入的针的贯通孔14。
而且,在本实施方式中,电子单元3经由作为装配机构的铰接机构8相对安装单元6被自由安装拆卸地装配。
由此,在对安装单元6以及装配于安装单元6的传感器5进行了灭菌消毒之后,能够将电子单元3装配于安装单元6,因而能进行分离了电子单元3的状态下的灭菌消毒。
在此,进行对电子单元3进行了分离的状态下的灭菌消毒的理由在于,在灭菌消毒中例如采用了电子束灭菌的情况下,为了不能对电子单元3进行灭菌,从而必须从灭菌对象的构件分离电子单元3。因此,通过电子单元3经由作为装配机构的铰接机构8相对安装单元6能自由安装拆卸地装配,从而能进行在分离了电子单元3的状态下的灭菌消毒。
<电子单元3的说明>
图9表示电子单元3的功能模块图。
图9的传感器单元18具有上述的传感器5和传感器连接端子7。
电子单元3中由传感器单元18检测且由测定部19测定的电流值被发送到控制部20。控制部20中,通过温度传感器21测定传感器单元18的附近的温度,在进行了温度补正的基础上根据电流值运算葡萄糖浓度。
控制部20以规定的采样时间间隔反复执行该葡萄糖浓度的运算。在本实施方式中,该采样时间间隔例如被设定为1分钟。
而且,控制部20按每个规定的记录时间间隔对所运算的葡萄糖浓度计算累计平均值,并记录于存储部22中。在本实施方式中,该记录时间间隔例如被设定为5分钟。因而,计算5分钟的每隔1分的5个样本的累计平均值,该累计平均值被记录于存储部22。
控制部20按照来自测定装置4的指示将存储于存储部22的值经由通信部23发送到测定装置4。
本实施方式的电子单元3内置有对测定部19、控制部20、温度传感器21,通信部23等供电的电池(蓄电池)24。而且,通常,在电池24的蓄电池余量处于不足的时间点,电子单元3被废弃。电池24的蓄电池余量通过测定装置4被监视。
而且,如果更换传感器单元18,则测定装置4对于电子单元3的电池24的蓄电池余量,确认电池24的余量到下一次的传感器单元18的更换之前是否充足。而且,如果余量不充足的情况下,控制部20进行控制以使得对使用者输出指示信息、声音以便更换电子单元3,并且不能使用电子单元3。
另外,上述实施方式3所涉及的人体装配型传感器装置1的结构中,电子单元3能可安装拆卸地装配于电子单元壳体17。在该结构中,电池(蓄电池)24不是配置在电子单元3内,而是配置于设于电子单元壳体17的蓄电池配置部,并对电子单元3供电。
由此,不需要在电子单元3内放入电池24,因而能使电子单元3小型化。
进而,在传感器单元18的更换时期,从电子单元壳体17拆下电子单元3,传感器单元18、安装单元6和电子单元壳体17与电池24一起被废弃。而且,被更换为新的传感器单元18、安装单元6、电子单元壳体17以及电池24,装着该电子单元壳体17。
由此,电子单元3的更换并不取决于电池24的余量,由于能够长时间使用电子单元3,因而能降低制品的成本。
另外,电池24也可被配置于安装单元6。在该情况下,不需要将电池24放入电子单元3内,因而能够使电子单元3变得小型。进而,在传感器单元18的更换时期,从安装单元6拆下电子单元3,传感器单元18和安装单元6与电池24一起被废弃。而且,通过被更换为新的传感器单元18、安装单元6以及电池24,从而电子单元3的更换并不取决于电池24的余量,由于能长时间使用电子单元3,因而能降低制品的成本。
<人体装配型传感器装置1对人体的装配的使用例>
图10、图11以及图12表示人体装配型传感器装置1对人体的装配例。
图10中,将持续血糖测定(CGM)系统的人体装配型传感器装置1保持于内部的传感器插入装置25与糖尿病患者的上臂部2相抵接,在上壳体26由手把持的状态下被压入到下方。
在该状态下,人体装配型传感器装置1的传感器5成为被穿刺到人体的状态。
图11表示从图10所示的状态到将传感器插入装置25举到上方的状态。在该状态下,传感器插入装置25释放了人体装配型传感器装置1。而且,人体装配型传感器装置1的电子单元3相对安装单元6成为稍微打开的状态。
如上述那样电子单元3相对于安装单元6经由铰接机构8、58被相互连结。而且,在传感器插入装置25释放了人体装配型传感器装置1的状态下,电子单元3由于其自重而相对安装单元6转动并接近。或者,如铰接机构58那样,在具有弹簧部16的情况下,通过该弹簧部16的弹簧力,电子单元3相对安装单元6成为几乎抵接的(关闭的)状态。
图12中,使用者通过用手指27将电子单元3的上表面向下方推压,从而电子单元3在相对于安装单元6相互接近的状态下结合。此时,装配于安装单元6的传感器单元18的传感器连接端子7和电子单元3的第二连接端子10被连接。而且,人体装配型传感器装置1被电气地起动,与测定装置4开始通信,开始人体皮下的间质液的葡萄糖浓度的测定。
在此,在安装单元6的底面设置有粘结材料。如上述那样通过使用者用手指27将电子单元3的上表面朝向下方推压,从而安装单元6对上臂部2的皮肤的表面装着。因此,安装单元6的底面的粘结材料能对上臂部2的皮肤更可靠地粘结。
<传感器插入装置25的结构>
图13的(a)以及图13的(b)表示传感器插入装置25的外观图。
图13的(a)表示将上壳体26压入到下方前的状态,图13的(b)表示将上壳体26压入到下方的状态。
如图13的(a)所示,传感器插入装置25作为主体壳体具有上壳体26、和相对上壳体26在上下方向上自由滑动地构成的下壳体28。
接下来,对本实施方式的传感器插入装置25的内部结构进行说明。图14的(a)~图14的(d)表示传感器插入装置25的传感器穿刺时的内部的状态。
如图14的(a)所示,传感器插入装置25具备:在主体壳体(上壳体26以及下壳体28)内将传感器5插入到人体的传感器插入机构29;在将传感器5插入到人体之前的期间,以上述的第一状态支承电子单元3的支承部30;和保持安装单元6的保持部31。
传感器插入机构29具有:穿刺针32、穿刺针保持架33、在作为穿刺方向的下方驱动穿刺针保持架33并在穿刺后将穿刺针保持架33拉到上方而从皮肤拔出穿刺针32的驱动部34。
作为传感器插入机构29的结构,例如上述专利文献2、专利文献4中记载的弹簧也可用作驱动部34。此外,专利文献3中记载的联结机构也可用作驱动部34。另外,在本实施方式中,为了避免说明的繁琐而省略了驱动部34的具体的结构的说明。
支承部30作为形成为从上壳体26内的顶部面延伸到下方的壁面而设置,在图14的(a)~图14的(c)所示的状态下,以电子单元3相对安装单元6的转动角度为约90度的状态进行支承。
再次,返回到图14的(a)~图14的(d)进行说明。
图14的(a)表示上壳体26被压入到下方前的状态。
上壳体26内,在上壳体26的下方,人体装配型传感器装置1的安装单元6被保持部31保持。
而且,穿刺针32成为内包传感器5的状态。
通过铰接机构58与安装单元6连接的电子单元3被支承部30支承。电子单元3在通过铰接机构58相对安装单元6能转动的状态下被相互连结。因此,支承部30仅可支承为电子单元3不转动。
图14的(b)表示上壳体26被压入到下方的状态。在该状态下,穿刺针32在内包有传感器5的状态下被穿刺到皮下。
图14的(c)表示通过驱动部34而穿刺针保持架33被拉到上方的状态。在该状态下,传感器5成为从穿刺针32分离,而被留置于皮下的状态。
图14的(d)表示使用者将传感器插入装置25举到上方的状态。在该状态下,支承部30被固定地设置于上壳体26内,因而如果传感器插入装置25被举到上方,则支承部30也被举到上方,支承部30所产生的电子单元3的支承被解除。即,在传感器5被插入到人体之前的期间,电子单元3通过支承部30在上述的第一状态下被支承。而且,在传感器5被插入到人体之后,支承部30解除电子单元3的支承。
由此,能够形成:人体装配型传感器装置1的安装单元6与电子单元3在传感器连接端子7与第二连接端子10被连接前的状态下被装配的第一状态;和在传感器连接端子7与第二连接端子10已被连接的状态下被装配的第二状态。其结果,能够容易地进行人体装配型传感器装置1对人体的装配。
即,在本实施方式的结构中,在传感器5被插入到人体后,释放支承部30所产生的电子单元3的支承,从第一状态转移到第二状态,电子单元3被装配于安装单元6。其结果,能够容易地进行人体装配型传感器装置1对人体的装配。
<传感器装配方法的流程图>
图16表示本实施方式所涉及的传感器装配方法的流程图。
本实施方式的人体装配型传感器装置1具备至少一部分被插入到人体,并且具有传感器连接端子(第一连接端子)7的传感器5。安装单元6配置有传感器5的传感器连接端子7的至少一部分,并被装配于人体的皮肤上。电子单元3具有:经由装配机构的铰接机构8被装配于安装单元6,并且与传感器5的传感器连接端子7连接的第二连接端子10;和根据从传感器5输入的信号计算生物体信息的控制部20(参照图9)。
铰接机构8形成:在传感器连接端子7与第二连接端子10连接前的状态下使安装单元6与电子单元3相互装配的第一状态;和在传感器连接端子7与第二连接端子10已被连接的状态下使安装单元6与电子单元3相互装配的第二状态。
以下表示使用上述那样的人体装配型传感器装置1,将传感器5插入人体的传感器插入方法。
首先,在安装单元6的传感器连接端子7与电子单元3的第二连接端子10被连接前的第一状态,即,电子单元3已被支承部30支承的状态下,实施将安装单元6配置于皮肤的步骤(S1)。
接下来,实施将被装配于安装单元6的传感器5插入到人体的步骤(S2)。
而且,在传感器5被插入到人体之后,实施成为安装单元6的传感器连接端子7与电子单元3的第二连接端子10已被连接的第二状态的步骤(S3)。
由此,能够形成:在传感器连接端子7与第二连接端子10连接前的状态下使安装单元6与电子单元3相互装配的第一状态;和在传感器连接端子7与第二连接端子10已被连接的状态下使安装单元6与电子单元3相互装配的第二状态。其结果,能够容易地进行人体装配型传感器装置1对人体的装配。
(实施方式2)
以下,对本发明的其他实施方式所涉及的人体装配型传感器装置1的结构进行说明。
另外,在本实施方式中,在作为将电子单元3与安装单元6相互连结的装配机构的铰接机构58的结构与上述的铰接机构8的结构不同的点上,与上述实施方式1不同。其他结构与上述实施方式1相同,因而赋予相同的符号,并省略这些结构的详细的说明。
图5的(a)表示人体装配型传感器装置1的上表面图,图5的(b)表示其立体图。
人体装配型传感器装置1具备电子单元3、传感器5、安装单元6和铰接机构58。
传感器5至少一部分被插入到人体,并且具有传感器连接端子(第一连接端子)7。
安装单元6配置有传感器5的至少传感器连接端子7的一部分,并且,被装配于人体的皮肤上。
电子单元3具有:经由作为装配机构的铰接机构58被装配于安装单元6,与传感器连接端子7连接的第二连接端子10;和根据从传感器5输入的信号计算生物体信息的控制部20(参照图9)。
装配机构的铰接机构58形成在传感器连接端子7与第二连接端子10被连接前的状态下使安装单元6和电子单元3相互装配的第一状态、和在传感器连接端子7与第二连接端子10已连接的状态下使安装单元6与电子单元3相互装配的第二状态。
如图5的(a)以及图5的(b)所示,铰接机构58构成为将电子单元3与安装单元6相互连结。而且,如图17的(a)以及图17的(b)所示,铰接机构58具有铰接部15和弹簧部(弹性体)16。
如图17的(a)所示,铰接部15作为将铰接机构58中的电子单元3与安装单元6相互连结的部分而被成形。而且,铰接部15通过PP(聚丙烯)等的热可塑性树脂而与电子单元3侧一体化地被成形。换句话说,铰接部15作为电子单元3的一部分被一体成形。
如图17的(b)所示,弹簧部16为铰接部15中的成形为薄壁状的部分且能弯曲地成形。
在此,铰接部15以成为相对安装单元6关闭电子单元3的状态的角度被成形。
由此,如果成为在铰接部15中成形为薄壁状的弹簧部16相对安装单元6而打开电子单元3的状态,则赋予在对电子单元3关闭的方向上施力的施加力。
在电子单元3的底面设置有嵌入传感器连接端子7的一部分的插入口9。而且,插入口9中设置有与传感器连接端子7连接的第二连接端子10。
在插入口9的周缘设置有作为防水构件的O型圈11。O型圈11被配置为在电子单元3与安装单元6被相互结合的状态下,夹于电子单元3与安装单元6之间。由此,O型圈11作为防止水等浸入传感器连接端子7以及第二连接端子10的防水机构发挥功能。
进而,人体装配型传感器装置1还具备用于维持电子单元3与安装单元6被结合的状态的锁定机构12、13。锁定机构12、13具有设置于安装单元6侧的卡扣12a、12b和设置于电子单元3侧的插入口13a、13b。在电子单元3与安装单元6被相互结合的状态下,卡扣12a与插入口13a、卡扣12b和插入口13b分别进行嵌合。其结果是,维持电子单元3与安装单元6的结合状态。
安装单元6的底面成为被装配于上臂部2等的皮肤的粘结面。在安装单元6的底面设置有例如皮肤胶带等的粘结材料以使得对皮肤的粘结变得容易。而且,在结合锁定机构12、13时,需要从上方向下方施加力。因而,通过在结合锁定机构12、13时在下方施加力,从而安装单元6的底面被按压在进行装配的皮肤。其结果,人体装配型传感器装置1对上臂部2的皮肤能更可靠地装配。
图6的(a)~图6的(c)表示电子单元3与安装单元6经由铰接机构58被相互结合的过程。
电子单元3与安装单元6在通过铰接机构58能转动的状态下被连结。
而且,在电子单元3与安装单元6被相互结合的情况下,以铰接机构58为支点,使电子单元3转动而被结合。
在此,将以铰接机构58作为中心、安装单元6与电子单元3所构成的角度定义为转动角度。
图6的(a)表示电子单元3与安装单元6的转动角度为约90度的状态(非装配状态)。图6的(b)表示电子单元3与安装单元6的转动角度为约30度的状态(非装配状态)。这些非接触状态为电子单元3与安装单元6经由铰接机构58被相互装配,传感器连接端子7与第二连接端子10还未被连接的状态。该状态被定义为第一状态。
而且,图6的(c)表示电子单元3与安装单元6的转动角度为0度,且电子单元3与安装单元6被完全地结合的状态(装配状态)。这是传感器连接端子7与第二连接端子10被连接的状态。该状态被定义为第二状态。
如上所述,电子单元3与安装单元6通过铰接机构58被相互连结。而且,铰接机构58形成在与传感器5连结的传感器连接端子7和设置于电子单元3侧的第二连接端子10被连接前的状态下,使安装单元6和电子单元3相互装配的第一状态。
如图6的(a)以及图6的(b)所示,该第一状态为传感器连接端子7与第二连接端子10被相互连接前的状态。
进而,铰接机构58形成在与传感器5连结的传感器连接端子7和设置于电子单元3侧的第二连接端子10被连接的状态下,使安装单元6与电子单元3装配的第二状态。
如图6的(c)所示,该第二状态为传感器连接端子7与第二连接端子10被相互连接的状态。
如上所述,在本实施方式中,通过铰接机构58形成:在传感器连接端子7与第二连接端子10被连接前的状态下使安装单元6和电子单元3相互装配的第一状态;和在传感器连接端子7与第二连接端子10已被连接的状态下使安装单元6和电子单元3相互装配的第二状态,从而能够容易地进行人体装配型传感器装置1对人体的装配。
即,在将传感器5插入到人体之后,通过经由铰接机构58使电子单元3相对安装单元6转动的简单的操作,从第一状态转移到第二状态,电子单元3被装配于安装单元6,因而能够容易地进行人体装配型传感器装置1对人体的装配。
由此,装配有传感器的部位即使为不能看到的位置(例如,上臂部2的外侧等)也能通过经由铰接机构58使电子单元3转动的简单的操作使电子单元3装配于安装单元6,而将传感器连接端子7与第二连接端子10连接。其结果,能够容易地进行人体装配型传感器装置1对人体的装配。
此外,安装单元6与电子单元3在经由铰接机构58能相互转动的状态下被连结,因而不需要用手捏着较小的电子单元3装着于安装单元6以及传感器5。其结果是,能够容易地进行人体装配型传感器装置1对人体的装配。
进而,如上述那样在铰接机构58中设置有弹性体。弹性体构成为在对安装单元6的装配方向上对电子单元3施力。
在本实施方式中,弹性体通过设置于铰接机构58的弹簧部16而构成。弹簧部16与铰接部15一起采用树脂等的材料被一体地成形。因此,能够不增加部件个数地形成具有弹性体的铰接机构58。
由此,如图6的(b)所示,在使用者不用手操作的状态下,人体装配型传感器装置1的电子单元3也相对于安装单元6成为几乎关闭的状态。
其结果是,使用者仅仅从上方用手指轻轻地推压电子单元3,能成为如图6的(c)所示,电子单元3被装配于安装单元6的状态。在该情况下,在人体装配型传感器装置1从上方朝向下方施加负载,因而安装单元6的底面被按压在所装配的皮肤。因此,人体装配型传感器装置1能对上臂部2的皮肤更可靠地装配。
此外,如图6的(b)所示,电子单元3覆盖在安装单元6上配置的传感器连接端子7,因而能够防止使用者错误地用手指触碰传感器连接端子7以及设置于电子单元3的底面的第二连接端子10。
另外,弹性体可为与铰接机构结合的扭簧,也可为板簧。
进而,在安装单元6的传感器5的上方设置有用于将传感器5穿刺到人体,并通过用于进行插入的针的贯通孔14。
(实施方式3)
以下,对本发明的进而其他的实施方式所涉及的人体装配型传感器装置1的结构进行说明。
另外,本实施方式的人体装配型传感器装置1在具备装配有电子单元3的电子单元壳体17这一点上,与上述实施方式1、2不同。其他的结构与上述实施方式1、2相同,因而赋予相同的符号,省略它们的结构的详细的说明。
图7的(a)表示人体装配型传感器装置1的上表面图,图7的(b)表示其立体图。
人体装配型传感器装置1具备电子单元3、传感器5、电子单元壳体17和铰接机构58。
传感器5至少一部分被插入到人体,并且具有传感器连接端子(第一连接端子)7。
安装单元6配置有传感器5的至少传感器连接端子7的一部分,并且,被装配于人体的皮肤上。
电子单元壳体17经由作为装配机构的铰接机构58被装配于安装单元6。
而且,电子单元3具有:相对于电子单元壳体17自由安装拆卸地被装配,且与传感器连接端子7连接的第二连接端子10;和根据从传感器5输入的信号计算生物体信息的控制部20(参照图9)。
装配机构的铰接机构58形成在传感器连接端子7与第二连接端子10被连接前的状态下使安装单元6和电子单元壳体17相互装配的第一状态、和在传感器连接端子7与第二连接端子10已连接的状态下使安装单元6与电子单元壳体17相互装配的第二状态。
如图7的(a)以及图7的(b)所示,铰接机构58构成为相互连结电子单元壳体17和安装单元6。而且,铰接机构58具有铰接部15和弹簧部16。另外,关于铰接部15以及弹簧部16的结构,如使用图17的(a)以及图17的(b)在上面已经说明过的那样。
在电子单元3的底面设置有嵌入传感器连接端子7的一部分的插入口9。而且,插入口9中设置有与传感器连接端子7连接的第二连接端子10。
在插入口9的周缘设置有作为防水构件的O型圈11。O型圈11被配置为在电子单元3与安装单元6被相互结合的状态下,夹于电子单元3与安装单元6之间。由此,O型圈11作为防止水等浸入传感器连接端子7以及第二连接端子10的防水机构发挥功能。
进而,为了保持电子单元壳体17与安装单元6被结合的状态(第二状态),人体装配型传感器装置1还具备将电子单元壳体17与安装单元6固定的锁定机构12、13。锁定机构12、13具有设置于安装单元6侧的卡扣12a、12b和设置于电子单元壳体17侧的插入口13a、13b。在电子单元3与安装单元6被相互结合的状态下,卡扣12a与插入口13a、卡扣12b与插入口13b分布进行嵌合。其结果是,维持电子单元3与安装单元6的结合状态。
安装单元6的底面成为被装配于上臂部2等的皮肤的粘结面。在安装单元6的底面设置例如皮肤胶带等的粘结材料以使得对皮肤的粘结变得容易。而且,在结合锁定机构12、13时,需要从上方向下方施加力。因而,通过在结合锁定机构12、13时在下方施加力,从而安装单元6的底面被按压在进行装配的皮肤。其结果,人体装配型传感器装置1对上臂部2的皮肤能更可靠地装配。
图8的(a)~图8的(c)表示电子单元壳体17与安装单元6经由铰接机构58被相互结合的过程。另外,此时,电子单元3被装配到电子单元壳体17。
电子单元壳体17与安装单元6以通过铰接机构58能转动的状态被连结。
而且,在电子单元壳体17与安装单元6被结合(成为面对面)时,以铰接机构58为支点,使电子单元壳体17转动而被结合。
在此,将以铰接机构58作为中心、安装单元6与电子单元壳体17所构成的角度定义为转动角度。
图8的(a)表示电子单元壳体17与安装单元6的转动角度为约90度的状态(非装配状态)。图8的(b)表示电子单元壳体17与安装单元6的转动角度为约30度的状态(非装配状态)。这些非接触状态为电子单元壳体17与安装单元6经由铰接机构58被相互装配,传感器连接端子7与第二连接端子10还未被连接的状态。该状态被定义为第一状态。
而且,图8的(c)表示电子单元壳体17与安装单元6的转动角度为0度,且电子单元3与安装单元6被完全地结合的状态(装配状态)。这是传感器连接端子7与第二连接端子10被连接的状态。该状态被定义为第二状态。
如上所述,电子单元壳体17与安装单元6通过铰接机构58被相互连结。而且,铰接机构58形成在与传感器5连结的传感器连接端子7和设置于电子单元3侧的第二连接端子10被连接前的状态下,使安装单元6和电子单元壳体17(电子单元3)相互装配的第一状态。
如图8的(a)以及图8的(b)所示,该第一状态为传感器连接端子7与第二连接端子10被相互连接前的状态。
进而,铰接机构58形成在与传感器5连结的传感器连接端子7和设置于电子单元3侧的第二连接端子10被连接的状态下,使安装单元6与电子单元壳体17(电子单元3)装配的第二状态。
如图8的(c)所示,该第二状态为传感器连接端子7与第二连接端子10被相互连接的状态。
如上所述,在本实施方式中,铰接机构58形成:在传感器连接端子7与第二连接端子10被连接前的状态下使安装单元6和电子单元壳体17(电子单元3)相互装配的第一状态;和在传感器连接端子7与第二连接端子10已被连接的状态下使安装单元6和电子单元壳体17(电子单元3)相互装配的第二状态。由此,能够容易地进行人体装配型传感器装置1对人体的装配。
即,在将传感器5插入到人体之后,通过经由铰接机构58使电子单元壳体17相对安装单元6转动的简单的操作,从第一状态转移到第二状态,电子单元3被装配于安装单元6。因此,能够容易地进行人体装配型传感器装置1对人体的装配。
由此,装配有传感器的部位即使为不能看到的位置(例如,上臂部2的外侧等)也能通过经由铰接机构58使电子单元3转动的简单的操作使电子单元壳体17(电子单元3)装配于安装单元6,而将传感器连接端子7与第二连接端子10连接。其结果,能够容易地进行人体装配型传感器装置1对人体的装配。
此外,安装单元6与电子单元3在经由铰接机构58能转动的状态下被连结。因此,不需要用手捏着较小的电子单元3来装着于安装单元以及传感器。其结果是,能够容易地进行人体装配型传感器装置1对人体的装配。
进而,如上所述,铰接机构58中设置有弹性体。弹性体构成为对电子单元3在对安装单元6的装配方向上施力。
在本实施方式中,弹性体由设置于铰接机构58的弹簧部16构成。弹簧部16与铰接部15一起使用树脂等的材料而被一体地成形。因此,能不会增加部件个数地形成具有弹性体的铰接机构58。
由此,如图8的(b)所示,在使用者不用手操作的状态下,人体装配型传感器装置1的电子单元壳体17也成为相对于安装单元6几乎关闭的状态。
其结果是,使用者仅仅从上方用手指轻轻地推压电子单元壳体17,能成为如图8的(c)所示,电子单元壳体17被装配于安装单元6的状态。在该情况下,在人体装配型传感器装置1从上方朝向下方施加负载,因而安装单元6的底面被按压在所装配的皮肤。因此,人体装配型传感器装置1能对上臂部2的皮肤更可靠地装配。
此外,如图8的(b)所示,电子单元壳体17覆盖配置于安装单元6上的传感器连接端子7,因而能够防止使用者错误地用手指触碰传感器连接端子7以及设置于电子单元3的底面的第二连接端子10。
另外,弹性体也可为设置于铰接机构58的扭簧,也可为板簧。
进而,在安装单元6的传感器5的上方设置有用于将传感器5穿刺到人体,并通过用来进行插入的针的贯通孔14。
而且,在本实施方式中,电子单元壳体17经由作为装配机构的铰接机构58被装配于安装单元6。而且,电子单元3能安装拆卸地被装配于电子单元壳体17。
由此,在对电子单元壳体17、安装单元6以及装配于安装单元6的传感器5进行了灭菌消毒之后,能将电子单元3装配于电子单元壳体17。因而,能够在分离了电子单元3的状态下进行灭菌消毒。
在此,在分离了电子单元3的状态下进行灭菌消毒的理由在于,在灭菌消毒中材料了例如电子束灭菌的情况下,为了不对电子单元3进行灭菌,因而必须从灭菌对象的构件分离电子单元3。因此,电子单元壳体17经由铰接机构58能对安装单元6自由安装拆卸地装配。由此,电子单元3能被安装拆卸地装配于电子单元壳体17,因而能进行在分离了电子单元3的状态下的灭菌消毒。
(实施方式4)
以下,对本发明的进而其他的实施方式所涉及的传感器插入装置25的结构进行说明。
另外,本实施方式的传感器插入装置25的支承电子单元3的支承部130的方式与上述实施方式的支承部30不同。其他的结构与上述实施方式相同,因而赋予相同的符号,并且省略它们的结构的详细的说明。
图15的(a)~图15的(d)表示传感器插入装置25的传感器穿刺时的内部的状态。
如图15的(a)所示,传感器插入装置25具备:在主体壳体(上壳体26以及下壳体28)内将传感器5插入人体的传感器插入机构29;在将传感器5插入到人体之前的期间,在上述的第一状态下支承电子单元3的支承部130;和保持安装单元6的保持部31。
传感器插入机构29具有穿刺针32、穿刺针保持架33、将穿刺针保持架33在作为穿刺方向的下方进行驱动并在穿刺后将穿刺针保持架33拉到上方而将穿刺针32从皮肤拔出的驱动部34。
关于该传感器插入机构29,与上述实施方式1同样地为了避免说明的繁琐而省略说明。
支承部130设置为上壳体26内的穿刺针保持架33的侧面,在图15的(a)~图15的(c)所示的状态下,在电子单元3相对安装单元6的转动角度为约90度的状态下进行支承。
再次返回到图15的(a)~图15的(d)进行说明。
图15的(a)表示上壳体26被压入到下方前的状态。
在上壳体26内,在上壳体26的下方,人体装配型传感器装置1的安装单元6由保持部31保持。而且,穿刺针32成为内包传感器5的状态。
而且,通过铰接机构8与安装单元6连接的电子单元3成为通过支承部130被支承的状态。
而且,通过安装单元6和铰接机构8连接的电子单元3被支承部130支承。电子单元3通过铰接机构8相对安装单元6能转动地连结。因此,支承部130也可仅支承为电子单元3不转动。
图15的(b)表示上壳体26被压入到下方的状态。在该状态下,穿刺针32在将传感器5内包的状态下被穿刺到皮下。
图15的(c)表示通过驱动部34而穿刺针保持架33被拉到上方的状态。在该状态下,成为传感器5从穿刺针32分离,而被留置于皮下的状态。
在此,由于电子单元3的支承部130被固定地设置于穿刺针保持架33,因而如果将穿刺针保持架33向上方举起,则支承部130也被举起到上方,电子单元3的支承被解除。即,在传感器5被插入到人体之前的期间,电子单元3通过支承部130在上述的第一状态下被支承。而且,在传感器5被插入到人体之后,支承部130解除电子单元3的支承。
图15的(d)为使用者将传感器插入装置25向上方举起的状态。
由此,能够形成人体装配型传感器装置1的安装单元6与电子单元3在传感器连接端子7与第二连接端子10被连接之前的状态下被装配的第一状态和传感器连接端子7与第二连接端子10已连接的状态下被装配的第二状态。其结果,能够使人体装配型传感器装置1对人体的装配变得容易。
即,在本实施方式的结构中,传感器5被插入到人体后,解除支承部130所产生的电子单元3的支承,从第一状态转移到第二状态,电子单元3被装配于安装单元6。其结果,能够使人体装配型传感器装置1对人体的装配变得容易。
另外,在本实施方式中,除了上述实施方式1、2的传感器插入装置25的结构之外,以电子单元3和安装单元6经由铰接机构8能转动地被装配的结构为例进行了说明。
但是,本发明在电子单元壳体17与安装单元6经由铰接机构8能转动地装配的结构中也同样地适用。在该结构中,支承部130成为支承电子单元壳体17的结构。
工业实用性
本发明的人体装配型传感器装置被较大地期待于适用于例如持续血糖测定系统中的血糖值传感器。
-符号说明-
1 人体装配型传感器装置
2 上臂部
3 电子单元
4 测定装置
5 传感器
6 安装单元
7 传感器连接端子(第一连接端子)
8 铰接机构(装配机构)
8a、8b 铰接构件
9 插入口
10 第二连接端子
11 O型圈
12、13 锁定机构
12a、12b 卡扣
13a、13b 插入口
14 贯通孔
15 铰接部
16 弹簧部(弹性体)
17 电子单元壳体
18 传感器单元
19 测定部
20 控制部
21 温度传感器
22 存储部
23 通信部
24 电池(蓄电池)
25 传感器插入装置
26 上壳体
27 手指
28 下壳体
29 传感器插入机构
30 支承部
31 保持部
32 穿刺针
33 穿刺针保持架
34 驱动部
58 铰接机构(装配机构)
130 支承部。
- 人体装配型传感器装置、传感器插入装置以及传感器插入方法
- 传感器插入装置及传感器插入方法