一种城市路网中车辆轨迹分类方法
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及信息技术领域,提供了一种城市路网中车辆轨迹分类方法。
背景技术
现有的轨迹聚类分为轨迹点聚类、分段轨迹聚类与整体轨迹聚类三类,轨迹点聚类以轨迹GPS点为单位进行聚类,分段轨迹聚类首先通过特定的条件将轨迹划分为子轨迹,再对子轨迹进行划分。整体轨迹聚类相对于其他两种算法而言,保留的轨迹信息更加完整,然而由于整条轨迹之间的长度不同并且轨迹中包含的轨迹点过多,对整条轨迹进行相似度函数的定义使得聚类过程快速有效是较为困难的。目前,整条轨迹聚类算法存在着效率较低的问题。
发明内容
本发明的目的在于解决现有采用正方形网格的中心点导致的与其相邻正方形网格的中心点之间的距离并不相等,邻居之间的不平等影响了聚类的精确度和效率的问题。
本发明为解决上述技术问题,采用以下技术方案:
步骤1:定义网格空间,将地图范围进划分为由六边形网格构成的空间,对每个六边形网格定义标识符g={g
步骤2:将一条轨迹上所有GPS点按时间先后投影至正六边形网格单元空间中,将轨迹由一系列网格单元构成,得到轨迹序列T
步骤3:定义两轨迹分别为T
两条轨迹T
两条轨迹T
其中,|T
步骤4:采用经典的Kmeans聚类算法进行聚类,首先随机选取k条轨迹作为轨迹聚类中心,通过两轨迹相似度判断其他轨迹与这k条轨迹的相似度,与这k条轨迹中的某一条相似度最高则划分至这条轨迹所在的簇群中,将所有轨迹划分完成后得到k个集群,在这k个集群中重新选取轨迹聚类中心,重复上述步骤直到轨迹聚类中心不再变化,则完成划分。
因为本发明采用上述技术方案,因此具备以下有益效果:
可以对城市路网中的移动轨迹进行聚类,这些轨迹被划分成几个簇群,每个簇群里面是相似的运动轨迹,也代表了一种移动模式,可以将该运动模式提取出来,找出市民每天的移动规律,这种移动规律有助于我们找到一周中的热点区域或热点路径,根据这些结果我们可以进行市区的交通规划,也可以预测一周中每天的道路拥堵状况。
附图说明
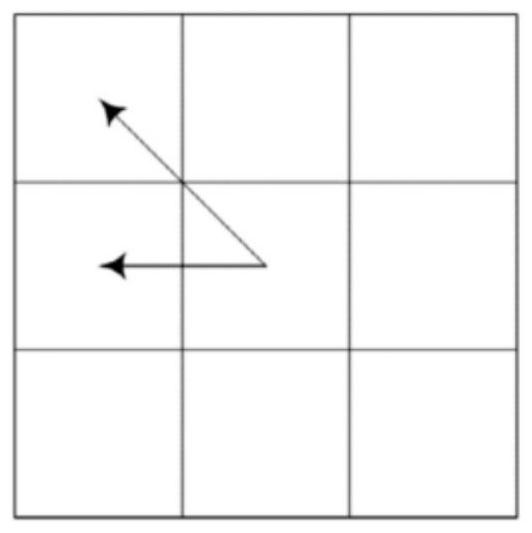
图1为正方形网格空间:正方形网格空间会造成相邻的网格空间距离不相等的情况,如图所示,图中心网格到左边的相邻网格与到左上方的相邻网格的距离不相等,造成邻居网格不平等的情况。
图2为正六边形网格空间:正六边形网格空间中相邻的网格的空间距离都是相等的如图所示,图中心网格到周围的相邻网格的距离完全相等,不会有邻居网格不平等的情况。
图3为轨迹到正六边形网格空间的投影:
在第三个图中,T1与T2为轨迹,g1等为网格标识符。T1轨迹经过了g1、g3、g4三个网格单元。
具体实施例
一个六边形网格单元g是由id与R组成的,其中id是网格g的标识符,R是网格单元的边长。
一个正方形网格的中心点与其相邻正方形网格的中心点之间的距离并不相等。这就导致了邻居之间的不平等。相反,一个正六边形网格的中心点与其相邻的正六边形网格的中心点之间的距离是相同的。这意味着每个相邻网格的地位是相等的,因此正六边形网格更接近实际的地图。
我们对轨迹数据集所包含的地图范围进行划分,将其划分为如下所示的由六边形网格构成的空间。
步骤1:定义网格空间,将地图范围进划分为由六边形网格构成的空间,对每个六边形网格定义标识符g={g
步骤2:将一条轨迹上所有GPS点按时间先后投影至正六边形网格单元空间中,将轨迹由一系列网格单元构成,得到轨迹序列T
步骤3:定义两轨迹分别为T
两条轨迹T
两条轨迹T
其中,|T
步骤4:采用经典的Kmeans聚类算法进行聚类,首先随机选取k条轨迹作为轨迹聚类中心,通过两轨迹相似度判断其他轨迹与这k条轨迹的相似度,与这k条轨迹中的某一条相似度最高则划分至这条轨迹所在的簇群中,将所有轨迹划分完成后得到k个集群,在这k个集群中重新选取轨迹聚类中心,重复上述步骤直到轨迹聚类中心不再变化,则完成划分。
- 一种城市路网中车辆轨迹分类方法
- 一种车辆异常轨迹检测与分类方法