确定两个部件之间的相对角位置的方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及一种用于确定第一部件相对于第二部件围绕旋转轴线的相对角位置的方法,该方法将有利地使用磁位置传感器系统来实现。
背景技术
磁传感器系统的技术优势是众所周知的。它们可以以相对较低的成本生产,它们不会遭受明显的机械磨损,并且几乎对水分和非磁性污垢(灰尘、油等)不敏感。由于这些优点,磁传感器系统经常用于汽车应用中。
磁角位置传感器系统包括至少一个永久磁化的磁化主体,以及至少一个磁场测量单元,该传感器系统被设置为测量该测量单元相对于磁化主体的围绕旋转轴线的相对位置。
在实际应用中,要监测的机构包括第一部件和第二部件,第一部件和第二部件可相对于彼此旋转移动。磁化主体固定到第一部件或集成在其中,而测量单元固定到机构的第二部件,并且传感器系统允许确定机构的两个部件的相对位置。
在某些情况下,期望能够在严格小于360度角的角行程上测量相对位置。但是,在其他情况下,期望能够确定围绕旋转轴线的360度角,甚至超过360°度角范围的相对位置。
通常,在汽车领域的应用中,这种传感器系统用于确定方向盘的角位置,该方向盘相对于车辆的固定部件在大于360度的范围上移动。在这种情况下,传感器系统通常设置在转向柱处。根据另一应用,这种传感器系统可以用于确定致动器(例如,用于驻车制动器致动器)的输出构件的角位置。本发明旨在解决与传感器系统的实际实施有关的问题,这些传感器系统通常旨在以有限的可用体积集成在受限的空间中,并且通常在传感器系统附近存在铁磁部件,这可能降低确定角位置的准确性。
文献US-8.587.294公开了一种方法,在该方法中,传感器系统通过使用由磁化主体产生的磁场的径向分量与切向分量的线性组合来实现。在该方法中,第一部件配备有磁化主体,其具有围绕旋转轴线旋转的圆柱形环的形状,并且具有径向磁化。第二部件在第一测量点处配备有第一测量单元,在第二测量点处配备有第二测量单元。每个测量单元分别沿着彼此正交且正交于旋转轴线的主测量轴和次测量轴传递至少两个电信号,这些电信号分别表示由磁化主体在所考虑的单元的测量点处产生的磁场的方向的主分量和次分量。第一测量单元的第一测量点和第二测量单元的第二测量点距旋转轴线的距离相等。在该文献中,两个测量点布置在围绕旋转轴线间隔开90°的位置。以这种方式,两个单元在两个测量点的每一个处分别测量由磁化环在所考虑的测量点处产生的场的纯径向分量和纯切向分量。该方案需要两个相对于彼此呈90°磁性放置的测量单元。这意味着磁场在以较大距离分隔开的两个点处测量,这会增加传感器对安装公差和磁干扰的灵敏度。另外,这涉及使用相对笨重的传感器系统。
文献US-2015/0142376提出了各种装置,所有这些装置的共同之处在于将测量单元设置在磁化系统的旋转轴线上,面对磁化系统的横向端面。由于需要将测量单元设置在旋转轴线上,因此必须将D1的对应的传感器系统强制性地布置在要测量其旋转位置的机构的轴的轴向端。该文献在图13中示出了一种装置,在该装置中,磁体具有圆柱形的旋转磁体,该圆柱形的旋转磁体被分为两个部分。构成磁化主体的材料的磁化方向在这两个部分之间是相反的,也就是说,磁化向量在两个部分之间总是具有相反的方向。
发明内容
本发明旨在限定一种用于确定两个部件之间的相对角位置的方法,该方法允许使用更紧凑的传感器系统。
为此,本发明提出了一种用于确定第一部件相对于第二部件围绕旋转轴线的相对角位置的方法,该方法包括:
-为第一部件配备磁化主体,该磁化主体为围绕旋转轴线旋转的角圆柱形扇区的形状,并具有径向磁化;
-在第一测量点处为第二部件配备第一测量单元,在第二测量点处为第二部件配备第二测量单元,每个测量单元分别沿着彼此正交且正交于旋转轴线的主测量轴(x)和次测量轴传递至少两个电信号,该至少两个电信号分别表示由磁化主体在所考虑的单元的测量点处产生的磁场的主分量和次分量;
-将第一测量单元的第一测量点和第二测量单元的第二测量点布置在距旋转轴线的相等距离处,并且在围绕旋转轴线以严格小于90度角的非零固定角度间隔开的位置中;
特征在于,
-第一测量单元和第二测量单元布置在第二部件上,使得第一测量单元和第二测量单元的主测量轴彼此平行,并且第一测量单元和第二测量单元的次测量轴彼此平行;
-该方法通过确定原始角度来确定表示两个部件之间的相对角位置的值,该原始角度的切线是一方面的次分量的差与另一方面的主分量的差之间的比率的函数,次分量和主分量是由两个单元对于给定的相对角位置测量的。
根据本发明的其他特征,单独或组合考虑:
-第一测量单元和第二测量单元可以布置在第二部件上,使得第一测量单元和第二测量单元的主测量轴或者第一测量单元和第二测量单元的次测量轴沿两个测量点之间的角度偏差的平分线方向定向,该角度偏差是在垂直于旋转轴线的平面中围绕旋转轴线测量的。
-该方法可以通过从计算出的原始角度减去固定的角度偏差来计算相对角位置。
-磁化主体可以具有围绕旋转轴线旋转的圆柱形管状扇区的部分的形状。
-磁化主体可以具有围绕旋转轴线旋转的圆柱形盘的角扇区的部分的形状。
-磁化主体可以具有围绕旋转轴线360°的角扇区的形状。
-第一测量单元和第二测量单元可以在围绕旋转轴线以非零固定角度间隔开的位置中布置在第二部件上,该非零固定角度小于30度,优选地小于或等于20度。
附图说明
从以下参考附图给出的描述中得出各种其他特征,这些附图通过非限制性示例示出了本发明的目的的实施例。
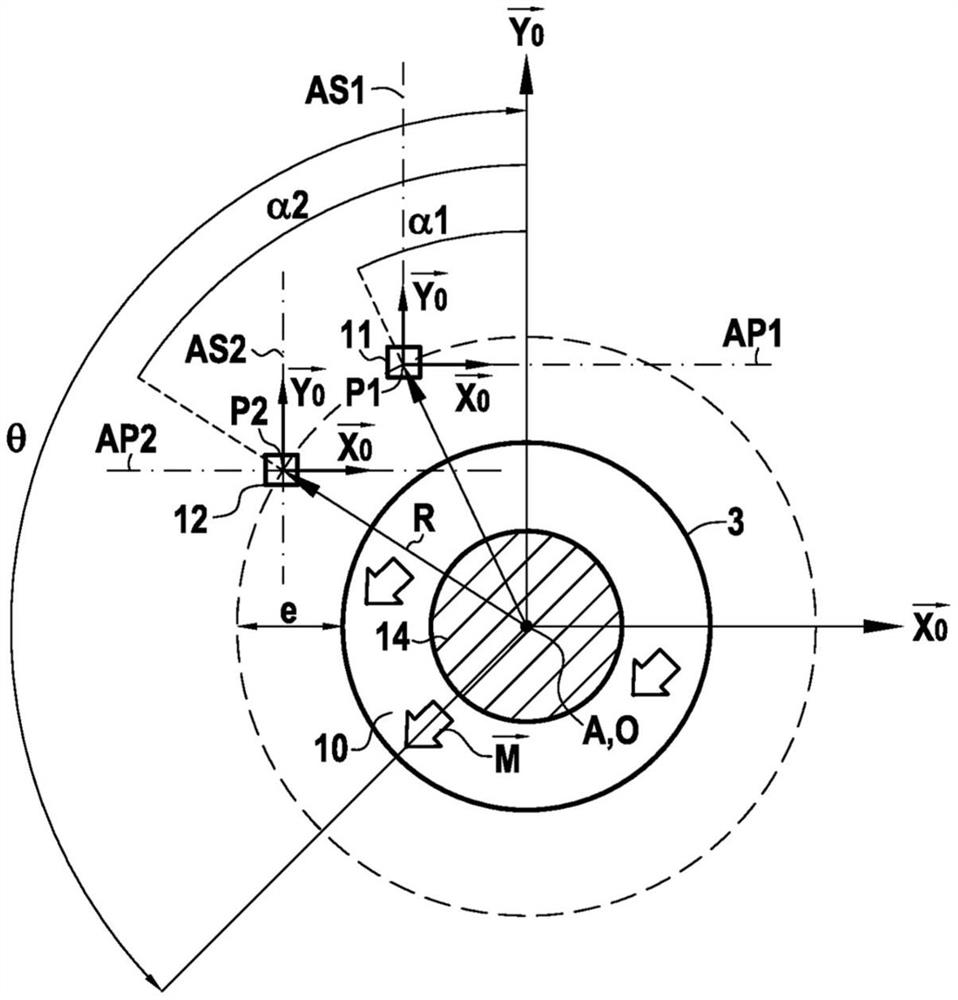
-图1是示出用于实现本发明的传感器系统的一个实施例的示意性透视图;-图2是图1系统在通过垂直于旋转轴线的平面的横截面中的示意图;
-图3是类似于图1的视图,示出了用于实现本发明的传感器系统的第二实施例;
-图4示出了根据本发明的方法的步骤;
-图5示出了通过仿真获得的差分信号。
具体实施方式
图1和图2示出了磁位置传感器系统1的一个实施例,该系统允许实现根据本发明的用于确定相对角位置的方法。
对于该第一实施例,传感器系统1被设计成确定两个部件14、16的相对位置,两个部件14、16可能一方面沿轴线A的旋转移动相对于彼此移动。在示例中,不存在其他相对位移轴。然而,可能提供的是,两个部件14、16可能沿第二相对位移轴相对于彼此移动,该第二相对位移轴例如可以对应于平行于旋转轴线A的平移。在示例中,考虑到两个部件14、16相对于旋转轴线A沿着径向方向没有相对移动。因此,传感器系统1可以例如用于检测固定在转向柱上的方向盘的位置,传感器系统有利地布置在转向柱的旋转轴线上。
传感器系统1一方面包括具有永久磁化
传感器系统1一方面包括具有永久磁化
传感器1被设置为确定磁化主体10相对于测量单元11、12围绕旋转轴线A的相对角位置。因此,磁化主体10与测量单元11、12之间的相对移动(其在所考虑的示例中是简单的旋转),可以在垂直于旋转轴线A的平面中的正交参考系
磁化主体10的几何形状为围绕旋转轴线A旋转的角圆柱形扇区的形状。该角扇区可以具有围绕旋转轴线A小于360度角的范围。然后,它可以特别地呈现“平铺(tile)”几何形状,也就是说具有围绕轴线A旋转的一段圆柱形管的扇区的形状,其由平行于旋转轴线A的两个侧向边缘界定。但是在所示的实施例中,角扇区具有围绕旋转轴线A的等于360度角的范围,因此,在该示例中,磁化主体10具有“环”几何形状,其为一段围绕轴线A旋转的圆柱形管的形状。
在图1的示例中,磁化主体10布置在轴14上,与轴的纵向端部相距一定距离,因此,轴14的各部分在磁化主体10的每一侧上。然而,如图3所示,可以提供一种构造,其中磁化主体布置在轴的纵向端部处的轴端处。在这种情况下,磁化主体除其他情况外,如果必须覆盖360°角扇形,则可以具有盘的几何形状。
当然,磁化主体10具有沿相对于旋转轴线A的径向方向的厚度。在盘形磁化主体的情况下,如图3所示,该厚度对应于盘的半径。
磁化主体10具有前包络表面3,其在所示的示例中是围绕磁化主体的旋转轴线A旋转的外圆柱表面。通常,特别是对于用于测量致动器的输出轴的角位置的应用,磁化主体可以具有对应于前包络表面3的直径的外径,该外径可以包括在10毫米至40毫米的范围内。对于其他应用,可以实现更大的直径。
在一方面的测量单元11、12与另一方面的磁化主体10之间的相对位移期间,测量单元11、12相对于所面向的磁化主体10的前包络表面3移动。这意味着测量单元11、12相对于磁化主体10的前包络表面3沿相对于旋转轴线A的径向方向偏移。这还意味着测量单元11、12沿旋转轴线A的方向与磁化主体10的前包络表面3具有对应关系。优选地,如在图1和图2的示例中,测量单元11、12沿旋转轴线A的方向与磁化主体10的前包络表面3的中间高度具有对应关系。在该示例中,在磁化主体10与测量单元11、12之间的相对位移期间,气隙距离“e”沿相对于旋转轴线的径向方向在测量单元11、12和磁化主体10的前包络表面3之间保持恒定。然而,不排除气隙距离可以在操作场的至少一部分范围内变化。
使用传感器系统1进行的相对角位置确定是针对测量单元11、12与磁化主体10之间的任何相对角位置进行的,该相对角位置在围绕旋转轴线A的两个不同的极端相对角位置之间变化,优选地针对360度角的所有相对角位置进行。在某些情况下,将规定,磁化主体10沿旋转轴线A的方向具有足够的范围,从而对相对角位置的确定也是针对轴向位置的,其中该轴向位置在沿轴线A的方向的两个不同的极端相对位置之间变化。
在磁化主体10的任何磁化点处,构成磁化主体10的材料的磁化方向
在示例中,磁化主体的磁化或磁化强度至少在通常的工业技术可行性范围内具有磁化值M或在磁化主体10的任何磁化点处恒定。
在所示的示例中,第一单元11和第二单元12的测量点P1和P2布置在垂直于旋转轴线A的同一平面中。在所示的示例中,该平面还特别地沿着旋转轴线A的轴向方向与磁化主体10重合。有利地,可以确保测量点P1和P2所在的垂直于旋转轴线A的平面是磁化主体10的对称平面。
在传感器系统1中,两个测量单元11、12中的每一个在对应的测量点P1、P2处确定表示由磁化主体10在这些测量点P1、P2处产生的磁场B的取向的值。每个测量单元11、12分别沿着彼此正交且正交于旋转轴线A的主测量轴AP1、AP2和次测量轴AS1、AS2传递至少两个电信号(例如数字和/或模拟信号),分别表示代表由磁化主体10在所考虑单元的测量点处感应的磁场B的向量的主分量和次分量。
第一测量单元11的第一测量点P1和第二测量单元的第二测量点P2布置在与旋转轴线A相距等距离R处。有利地,如图所示,它们可以布置在围绕旋转轴线A的以严格小于90度的非零固定角度间隔开的位置中。
此外,第一测量单元11和第二测量单元12布置在第二部件16上,使得第一测量单元11和第二测量单元12的主测量轴AP1、AP2彼此平行,并且第一测量单元和第二测量单元的次测量轴AS1、AS2彼此平行。换句话说,两个测量单元11、12,特别是它们的测量元件彼此平行地布置。特别地,这意味着,两个单元中的至少一个具有处于该单元的对应的测量点P1,P2处的主测量轴AP1、AP2和辅助测量轴AS1、AS2,它们在该点处相对于轴线A的相对旋转移动不与径向和切线方向对齐。在所示的示例中,第一测量单元11和第二测量单元12的主测量轴AP1、AP2以相同的方式向量地定向,而第一测量单元和第二测量单元的次测量轴AS1、AS2也以相同的方式向量地定向。换句话说,两个测量单元11、12,特别是它们的磁敏元件以相同的方式布置。但是,第一测量单元11和第二测量单元12的主测量轴AP1、AP2和/或第一测量单元和第二测量单元的次测量轴AS1、AS2可以沿着相同方向的两种相反方式向量地定向。但是,在这种情况下,有必要在相同的向量基础上相对于同一种方式来表示主分量和次分量的代数值,从而考虑了由单元传递的两个代数值之一的相反值。
第一单元11和第二单元12的测量点P1和P2是不同的点,围绕旋转轴线A彼此间隔开。两个测量点之间的最小距离必须使得由磁化主体在这两个点处产生的磁场的表示值相差大于测量单元的分辨能力的偏差。换句话说,不得传递表示磁场的向量的相同的值作为第一测量单元和第二测量单元在这两个点处相应的测量结果。
第一测量单元11和第二测量单元12可布置在第二部件16上,使得第一测量单元和第二测量单元的主测量轴或第一测量单元和第二测量单元的次测量轴沿着两个测量点P1、P2之间的角偏差的平分线的方向定向,该角偏差在垂直于旋转轴线A的平面中围绕旋转轴线A进行测量。第一测量单元11和第二测量单元12可以布置在第二部件16上,使得第一测量单元11和第二测量单元12的主测量轴AP1、AP2沿着两个测量点之间的角偏差的平分线的方向定向,该角偏差在垂直于旋转轴线的平面中围绕旋转轴线A进行测量。作为变型,第一测量单元和第二测量单元的次测量轴可以沿着两个测量点之间的角偏差的平分线的方向定向。但是,其他取向也是可能的。因此,图2示出了第一测量单元和第二测量单元的主测量轴平行于基向量
有许多可商购获得的单元允许获得这些测量结果。
因此,可以在本发明中使用的单元的示例可以实现组件“MLX90365三轴位置传感器IC(Triaxis Position Sensor IC)”,该组件由比利时公司Melexis NV,Rozendaalstraat 12,B-8900Ieper销售,并且特别地在文档“MLX90365三轴位置传感器IC数据表(Triaxis Position Sensor IC Datasheet)”(版本号5.8,2016年11月1日)中进行了描述。也可以使用来自同一制造商的其他参考文献,例如参考文献MLX90333或MLX90364。
已知每个组件都会引入与安装不确定性有关的公差,这种类型的测量单元11、12通过最小化集成电路的数量并通过减少部件的数量来简化生产来确保在单个点处的磁场的测量结果。单个点处的测量结果的概念根据传感器传递的位置测量结果的空间分辨率来评估。每个测量单元11、12例如可以包括通常由至少两个磁敏元件组成的磁敏单元,磁敏元件彼此非常靠近到被认为是同一点的点,并且其输出可能被测量单元的计算单元使用。通常,磁敏单元和计算单元是同一电子组件的一部分,这允许降低成本并提高传感器的可靠性。可以设想,两个测量单元11、12集成到同一电子组件中,该电子组件可以包括两个单元共用的计算单元。但是,在本发明的框架内可以规定,两个单元配备有通信单元,用于将信息传递给远程计算单元,该远程计算单元例如容纳在电子控制单元(ECU)或计算机中。
利用这种类型的单元,可以获得正交参考系中在每个测量点P1、P2处的向量的至少两个分量Bx、By,该向量表示由磁化主体10产生的磁场B。两个参考系分别在所考虑的测量点P1、P2处具有不同的原点,但具有相同的基向量。因此,在图2的示例中,为了进行下面的演示,参考系分别为
在本发明的框架内,对表示两个部件14、16之间的相对角位置的值进行确定。
如图4所示,因此可以理解,根据本发明的方法100包括步骤110:为第一部件14配备磁化主体10,该磁化主体10为围绕旋转轴线A旋转的角圆柱形扇区的形状,并且具有径向磁化。
该方法包括步骤120:为第二部件16在第一测量点P1处配备第一测量单元11,并且在第二测量点P2处配备第二测量单元12。
在这些步骤中,确保第一测量单元11的第一测量点P1和第二测量单元12的第二测量点P2布置在距旋转轴线A的相等距离处,并且布置在围绕旋转轴线A以严格小于90度角(优选地小于30度角,更优选地小于或等于20度角)的非零固定角度间隔开的位置中。
在该方法中,每个测量单元分别沿着彼此正交且正交于旋转轴线A的主测量轴AP1、AP2和次测量轴AS1、AS2传递130至少两个电信号,这些电信号分别表示由磁化主体10在所考虑的单元的测量点P1、P2处产生的磁场的向量的主分量B
在该方法中,第一测量单元11和第二测量单元12布置在第二部件16上,使得第一测量单元和第二测量单元的主测量轴AP1、AP2彼此平行,优选地以相同的方式向量地定向,并且第一测量单元和第二测量单元的次测量轴AS1、AS2彼此平行,优选地以相同的方式向量地定向。
该方法的上述步骤将通过利用如上所述的传感器系统1来有利地实现。
在步骤150中,该方法通过确定140原始角度来确定表示两个部件之间的相对角位置θ的值,该原始角度的切线是一方面的次分量的差与另一方面的主分量的差之间的比率的函数,次分量和主分量是由两个单元11、12对于给定的相对角位置测量的。
因此,该方法包括一个或多个计算步骤,该一个或多个计算步骤可以在计算单元中实现,该计算单元被集成到传感器系统1中,或者是远程的,例如在电子控制单元或计算机中。计算单元通常包括一个或多个存储模块、至少一个处理器、数据输入/输出模块以及可能的通信模块。该方法的计算步骤通常由包含对应的指令并存储在存储模块中的计算机程序实现。
因此,规定计算值ΔB
ΔB
例如,可能有:
ΔB
以最简单的方式,可能有:
ΔB
同样地,计算值ΔB
ΔB
例如,可能有:
ΔB
以最简单的方式,可能有:
ΔB
在这种情况下,本发明提供了将原始角度γ确定为圆弧,其切线表示一方面的次分量的差与另一方面的主分量的差之间的比率,该比率可以是比率ΔB
因此,该原始角度γ的值可以写为函数的形式:
γ=Arctan{f[ΔB
即,例如:
γ=Arctan{f[f
在该公式中,函数f可以认为是测量的值的滤波函数。以最简单的方式,可能有:
γ=Arctan{K
其中,对于在平面
实际上,θ是指表示两个部件14、16之间的相对角位置的角度,该角度是在垂直于旋转轴线A的平面中围绕旋转轴线A测量的。在示例中,表示两个部件14、16之间的相对角位置的角度θ在测量平面
在测量平面中限定的固定参考系
图1示出了传感器系统的示例性实施例的三维视图。
如图2所示,对于“环”型磁化主体10,由磁体产生的磁场的径向和切向分量由以下关系给出。
由磁化主体10在第一单元11的第一测量点P1处产生的磁场投影在从旋转轴线A导出并通过第一测量点P1的半径上的径向分量Br1由下式给出:
B
其中,B
由磁化主体10在第一单元11的第一测量点P1处产生的磁场投影在通过第一单元11的第一测量点P1的旋转的切线上的切向分量Bt1由下式给出:
B
其中,B
B
类似地,由磁化主体10在第二测量单元12的第二测量点P2处产生的磁场投影在从旋转轴线A导出并通过第二测量点P2的半径上的径向分量Br2由下式给出:
B
由磁化主体10在第二测量单元12的第二测量点P2处产生的磁场投影在通过第二测量单元12的第二测量点P2的旋转的切线上的切向分量Bt2由下式给出:
B
然后可以将表示在第一测量点P1处产生的磁场的向量在与第一单元11链接的参考系
B
B
以相同的方式,可以将表示在第一测量点P2处产生的磁场B的向量在与第二单元12链接的参考系
B
B
通过将等式(6)和(7)与等式(10)和(11)组合,以及通过将等式(8)和(9)与等式(12)和(13)组合,通过表达(1)和(2)给出的差,存在:
对于ΔB
ΔB
+(B
对于ΔB
ΔB
+(B
(14)和(15)可以写为以下形式:
ΔB
ΔB
其中,
A=(B
B=(B
如果现在角度δ被限定为使得:
则存在:
最后,由(3)计算的角度被发现为:
γ=δ-θ (24)
其中,
因此,通过测量(3)可以找到相对角位置θ,其中符号反转并且到最接近的常数,这可以通过传感器的校准容易地考虑到。
因此,图5示出了用于360度角的相对角位置θ的变化的、通过数值模拟获得的两个值ΔB
对于此数值模拟,为“环”型磁化主体的几何形状保留以下参数,如图2所示:
-磁体的外径:18毫米
-磁体的径向厚度:3毫米
-磁体的剩余感应:0.7T
-气隙“e”:4毫米
-磁体沿ZO轴的高度:6毫米
-测量点P1和P2之间的距离:2.4毫米
注意,在所提出的方法中,所考虑的两个值ΔB
此外,通过该方法确定的相对角位置θ的值不取决于振幅BR和BT,这使得传感器系统1相对于几何公差具有鲁棒性。
另外,可以观察到,该方法具有选择两个测量点之间的角度偏差的可能性,这允许优化传感器。例如,通过将测量单元设置为使得两个测量点在距离上足够接近,可以通过使用包括两个测量单元的单个电子组件以及可能的计算单元来降低传感器的成本。另外,两个测量单元越靠近,在所提出的方法中实现的差分计算将越多地限制可能的磁干扰对确定两个部件14、16的相对角位置的精度的影响。这种磁干扰尤其可能是由于传感器系统1附近存在铁磁部件而引起的。
本发明不限于所描述和呈现的示例,因为可以在不脱离其框架的情况下进行各种修改。
- 确定两个部件之间的相对角位置的方法和传感器系统及制造磁性元件的方法
- 确定两个部件之间的相对角位置的方法