一种基于机器视觉的食品质量快速检测装置
文献发布时间:2023-06-19 09:51:02
技术领域
本发明涉及食品检测设备技术领域,具体而言,涉及一种基于机器视觉的食品质量快速检测装置。
背景技术
广义的食品检验是指研究和评定食品质量及其变化的一门学科,它依据物理、化学、生物化学的一些基本理论和各种技术,按照制订的技术标准,如国际、国家食品卫生/安全标准,对食品原料、辅助材料、半成品、成品及副产品的质量进行检验,以确保产品质量合格。食品检验的内容包括对食品的感官检测,食品中营养成分、添加剂、有害物质的检测等。食品检验内容十分丰富,包括食品营养成分分析,食品中污染物质分析,食品辅助材料及食品添加剂分析,食品感官鉴定等。狭义的食品检验通常是指食品检验机构依据法律规定的卫生标准,对食品质量所进行的检验,包括对食品的外包装、内包装、标志、唛头和商品体外观的特性、理化指标以及其它一些卫生指标所进行的检验。
随着机器视觉技术的发展,将机器视觉技术应用在食品质量检验领域受到了越来越多的关注。通过机器视觉技术对食品质量进行检验,其能够提高食品质量检验的效率和准确率。现有的基于机器视觉的食品质量检测装置普遍存在结构复杂,成本高昂的问题,其结构有待改进。
发明内容
基于此,为了解决现有的基于机器视觉的食品质量快速检测装置普遍存在结构复杂且成本高昂的问题,本发明提供了一种基于机器视觉的食品质量快速检测装置,其具体技术方案如下:
一种基于机器视觉的食品质量快速检测装置,包括底座、支撑柱、控制器以及十字滑台,所述支撑柱垂直于所述底座,所述底座与所述支撑柱的一端固定连接,所述支撑柱的另一端与所述十字滑台固定连接,所述基于机器视觉的食品质量快速检测装置还包括图像采集机构以及食品放置平台,所述控制器与所述图像采集机构电连接,所述图像采集机构固定安装在所述十字滑台上,所述十字滑台位于所述食品放置平台的上方,所述十字滑台用于驱动所述图像采集机构在XY轴方向上移动以采集放置在所述食品放置平台上的食品的图像。
所述十字滑台位于所述食品放置平台的上方且用来驱动图像采集机构在XY轴方向上移动以采集放置在所述食品放置平台上的食品的图像,所述图像采集机构将采集到的食品图像反馈至控制器。所述控制器对食品图像进行处理,以分析判断食品质量。
上述基于机器视觉的食品质量快速检测装置中,通过控制十字滑台移动,可以将所述图像采集机构移动至食品放置平台上方,以更好的采集待检测食品图像,其不仅具有整体结构简单,成本低的特点,还可以提高食品质量检测的效率。
进一步地,所述食品放置平台包括承载板以及多个位于所述承载板下方的压力检测机构,多个所述压力检测机构均匀分布且与所述承载板的边缘固定连接。
进一步地,多个所述压力检测机构均包括连接件以及压力传感器,所述连接件的一端与所述承载板的边缘固定连接,所述连接件的另一端与所述压力传感器固定连接。
进一步地,所述连接件包括圆筒以及弹性元件,所述圆筒的一端与所述压力传感器的外侧边缘固定连接,所述圆筒的另一端位于所述压力传感器与所述承载板之间,所述弹性元件的一端与所述承载板的边缘固定连接,所述弹性元件的另一端滑动套设在所述圆筒内并与所述压力传感器的受力面接触。
进一步地,所述十字滑台包括X轴机构以及Y轴机构,所述X轴机构固定安装在所述支撑柱的另一端,所述Y轴机构固定安装在所述X轴机构上,所述图像采集机构固定安装在所述Y轴机构上,所述X轴机构用于驱动所述Y轴机构沿X轴方向移动,所述Y轴机构用于驱动所述图像采集机构沿Y轴方向移动。
进一步地,所述X轴机构包括第一伺服电机、第一滑动杆、第一滑动块以及第一丝杆,所述第一伺服电机固定安装在所述支撑柱的另一端,两根所述第一滑动杆相互平行,两根所述第一滑动杆均垂直于所述支撑柱且固定安装在所述支撑柱上,所述第一滑动块的两端分别与两根所述第一滑动杆滑动连接,所述第一丝杆穿过所述第一滑动块且与所述第一滑动块螺纹连接,所述第一丝杆的一端与所述第一伺服电机的输出轴传动连接。
进一步地,所述Y轴机构包括第二伺服电机、第二滑动杆、第二滑动块以及第二丝杆,所述第二伺服电机固定安装在所述支撑柱的另一端,两根所述第二滑动杆相互平行,两根所述第二滑动杆均垂直于所述支撑柱且固定安装在所述支撑柱上,所述第二滑动块的两端分别与两根所述第二滑动杆滑动连接,所述第二丝杆穿过所述第二滑动块且与所述第二滑动块螺纹连接,所述第二丝杆的一端与所述第二伺服电机的输出轴传动连接。
进一步地,所述基于机器视觉的食品质量快速检测装置还包括称重传感器以及底盘,所述底盘安装在所述称重传感器上,所述食品放置平台安装在所述底盘之上。
进一步地,所述控制器分别与所述第一伺服电机、所述第二伺服电机、所述压力传感器以及所述称重传感器电连接。
进一步地,所述图像采集机构为高清摄像头,所述弹性元件为螺旋弹簧。
附图说明
从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
图1是本发明一实施例中一种基于机器视觉的食品质量快速检测装置的整体结构示意图一;
图2是本发明一实施例中一种基于机器视觉的食品质量快速检测装置的整体结构示意图二;
图3是本发明一实施例中一种基于机器视觉的食品质量快速检测装置的X轴机构的结构示意图;
图4是本发明一实施例中一种基于机器视觉的食品质量快速检测装置的Y轴机构的结构示意图;
图5是本发明一实施例中一种基于机器视觉的食品质量快速检测装置的整体结构示意图三;
图6是本发明一实施例中一种基于机器视觉的食品质量快速检测装置的XY坐标系的示意图。
附图标记说明:
1、底座;2、支撑柱;3、控制器;4、十字滑台;5、图像采集机构;6、食品放置平台;7、承载板;8、连接件;9、压力传感器;10、圆筒;11、弹性元件;12、第一伺服电机;13、第一滑动杆;14、第一滑动块;15、第一丝杆;16、第二伺服电机;17、第二滑动杆;18、第二滑动块;19、第二丝杆;20、称重传感器;21、底盘。
具体实施方式
为了使得本发明的目的、技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明。应当理解的是,此处所描述的具体实施方式仅用以解释本发明,并不限定本发明的保护范围。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本发明中所述“第一”、“第二”不代表具体的数量及顺序,仅仅是用于名称的区分。
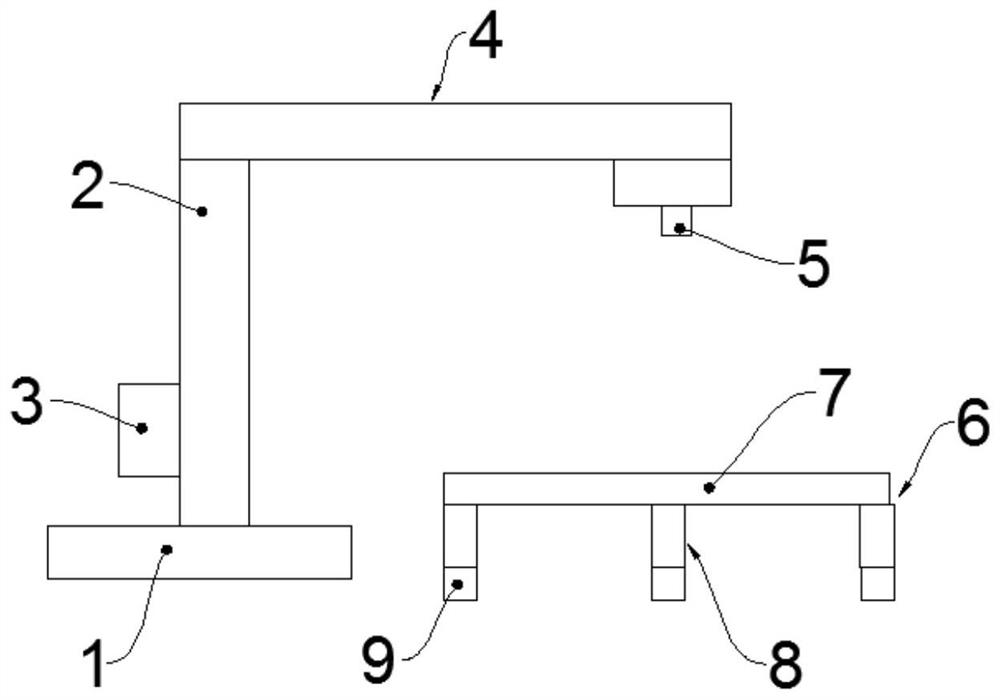
如图1所示,本发明一实施例中的一种基于机器视觉的食品质量快速检测装置,包括底座1、支撑柱2、控制器3以及十字滑台4,所述控制器3固定安装在所述支撑柱2上,所述支撑柱2垂直于所述底座1,所述底座1与所述支撑柱2的一端固定连接,所述支撑柱2的另一端与所述十字滑台4固定连接,所述基于机器视觉的食品质量快速检测装置还包括图像采集机构5以及食品放置平台6,所述控制器3与所述图像采集机构5电连接,所述图像采集机构5固定安装在所述十字滑台4上,所述十字滑台4位于所述食品放置平台6的上方,所述十字滑台4用于驱动所述图像采集机构5在XY轴方向上移动以采集放置在所述食品放置平台6上的食品的图像。具体而言,所述图像采集机构5可以是高清摄像头,所述控制器3包括用于根据食品图像对食品质量进行分析判断的图像处理模块。
所述十字滑台4位于所述食品放置平台6的上方且用来驱动图像采集机构5在XY轴方向上移动以采集放置在所述食品放置平台6上的食品的图像,所述图像采集机构5将采集到的食品图像反馈至控制器3。所述控制器3对食品图像进行处理,以方便后续的食品质量检测。
上述基于机器视觉的食品质量快速检测装置中,通过控制十字滑台4移动,可以将所述图像采集机构5移动至食品放置平台6上方,以更好的采集待检测食品图像,其不仅具有整体结构简单,成本低的特点,还可以提高食品质量检测的效率。
在其中一个实施例中,如图1所示,所述食品放置平台6包括承载板7以及多个位于所述承载板7下方的压力检测机构,多个所述压力检测机构均匀分布且与所述承载板7的边缘固定连接,多个所述压力检测机构均包括连接件8以及压力传感器9,所述连接件8的一端与所述承载板7的边缘固定连接,所述连接件8的另一端与所述压力传感器9固定连接。所述压力传感器9与控制器3电连接,其用来检测承载板7上食品的重量。
由于压力检测机构均匀地分布在承载板7的边缘之上,压力检测机构通过连接件8将承载板7上食品的重力转化为压力并传递到压力传感器9上。当食品没有放置在承载板7中心之时,多个压力检测机构所检测到的与食品重力值相对应的压力值之间必然会出现不相等的情况。根据多个压力检测机构所检测到的与食品重力值相对应的压力值大小,可以初步分析判断食品偏离承载板7中心的方向。也就是说,通过多个压力检测机构,可以分析判断食品在承载板7上的位置。
根据食品在承载板7上的位置控制十字滑台4移动,使图像采集机构5移动到食品正上方,可以更好地采集食品图像,为食品质量检测提供便利。
在其中一个实施例中,如图2所示,所述连接件8包括圆筒10以及弹性元件11,所述圆筒10的一端与所述压力传感器9的外侧边缘固定连接,所述圆筒10的另一端位于所述压力传感器9与所述承载板7之间,所述弹性元件11的一端与所述承载板7的边缘固定连接,所述弹性元件11的另一端滑动套设在所述圆筒10内并与所述压力传感器9的受力面接触。具体而言,所述弹性元件11可以为螺旋弹簧,当食品放置在所述承载板7上时,螺旋弹簧受压收缩,所述承载板7的下底面与所述圆筒10的上端始终预留有一定的间隙距离。所述承载板7呈圆形或方形形状。当所述承载板7呈方形形状时,所述压力检测机构共有四个,四个所述压力检测机构中的螺旋弹簧的一端与承载板7侧边中心固定连接。
在其中一个实施例中,所述十字滑台4包括X轴机构以及Y轴机构,所述X轴机构固定安装在所述支撑柱2的另一端,所述Y轴机构固定安装在所述X轴机构上,所述图像采集机构5固定安装在所述Y轴机构上,所述X轴机构用于驱动所述Y轴机构沿X轴方向移动,所述Y轴机构用于驱动所述图像采集机构5沿Y轴方向移动。
在其中一个实施例中,如图3所示,所述X轴机构包括第一伺服电机12、第一滑动杆13、第一滑动块14以及第一丝杆15,所述第一伺服电机12固定安装在所述支撑柱2的另一端,所述第一滑动杆13为两根且相互平行,两根所述第一滑动杆13均垂直于所述支撑柱2且固定安装在所述支撑柱2上,所述第一滑动块14的两端分别与两根所述第一滑动杆13滑动连接,所述第一丝杆15穿过所述第一滑动块14且与所述第一滑动块14螺纹连接,所述第一丝杆15的一端与所述第一伺服电机12的输出轴传动连接。具体而言,两根所述第一滑动杆13分别穿过所述第一滑动块14的两端而后与所述第一滑动块14滑动连接,所述第一滑动块14中固定安装有第一螺母,所述第一丝杆15与第一螺母螺纹连接,所述第一伺服电机12与控制器3电连接。
在其中一个实施例中,如图4所示,所述Y轴机构包括第二伺服电机16、第二滑动杆17、第二滑动块18以及第二丝杆19,所述第二伺服电机16固定安装在所述支撑柱2的另一端,所述第二滑动杆17为两根且相互平行,两根所述第二滑动杆17均垂直于所述支撑柱2且固定安装在所述支撑柱2上,所述第二滑动块18的两端分别与两根所述第二滑动杆17滑动连接,所述第二丝杆19穿过所述第二滑动块18且与所述第二滑动块18螺纹连接,所述第二丝杆19的一端与所述第二伺服电机16的输出轴传动连接。具体而言,两根所述第二滑动杆17分别穿过所述第二滑动块18的两端而后与所述第二滑动块18滑动连接,所述第二滑动块18中固定安装有第二螺母,所述第二丝杆19与第二螺母螺纹连接,所述第二伺服电机16与控制器3电连接。
通过控制器3控制所述第一伺服电机12以及第二伺服电机16转动,可以驱动所述图像采集机构5在XY轴方向上移动。上述十字滑台4具有结构简单,便于安装维修的特点,降低了所述基于机器视觉的食品质量快速检测装置的成本,简化了其整体结构。
在其中一个实施例中,如图5所示,所述基于机器视觉的食品质量快速检测装置还包括称重传感器20以及底盘21,所述底盘21安装在所述称重传感器20上,所述食品放置平台6安装在所述底盘21之上,所述称重传感器20与所述控制器3电连接。所述称重传感器20所述检测到的重量减去承载板7、多个压力检测机构以及底盘21的总重量后,即为食品的重量。
通过设置称重传感器20以及底盘21,可以很方便的称量出待检测食品的重量。
在其中一个实施例中,所述承载板7呈圆形形状,所述压力检测机构共有8个、16个或者32个。所述控制器3包括轨迹计算模块以及图像处理模块,所述图像采集机构5的原始位置正对所述承载板7的中心。如图6所示,将所述承载板7上表面设定为XY坐标系并以承载板7的中心为坐标原点,多个所述压力检测机构分别位于XY坐标系上的一个以坐标原点为圆心的圆的边上,所述控制器3根据所述承载板7的半径计算多个所述压力检测机构在XY坐标系上的坐标。当食品放置在所述承载板7上,所述控制器3通过接收以及比较多个压力检测机构反馈的压力值大小,将反馈压力值最大的压力检测机构位置设为移动目标,所述轨迹计算模块根据当前图像采集机构5所在坐标与移动目标所在坐标计算图像采集机构5与移动目标之间的最优移动路径,然后控制十字滑台4按照最优移动路径往移动目标移动,并在十字滑台4移动过程中更新所述图像采集机构5的坐标。
在十字滑台4移动过程中,所述控制器3控制图像采集机构5以一定频率对承载板7上的食品图像进行采集,所述图像处理模块接收图像采集机构5采集到的食品图像,并对食品图像进行处理并判断所采集到的食品图像是否符合预设标准。若所采集到的食品图像符合预设标准,所述控制器3控制所述十字滑台4停止移动并控制图像采集机构5采集当前食品图像,并输出当前食品图像以方便后续食品质量检测工作。
所述图像处理模块中存储有预设距离范围值,所述处理模块分别对采集到的食品图像的边缘轮廓以及食品图像中食品的边缘轮廓进行提取,并计算食品的边缘轮廓到食品图像的边缘轮廓之间的距离。若食品的边缘轮廓到食品图像的边缘轮廓之间的距离均在所述预设距离范围值,则判定所采集到的食品图像符合预设标准,否则判定所采集到的食品图像不符合预设标准。
其中,所述图像采集机构5与移动目标之间的最优移动路径可以为图像采集机构5与移动目标之间的最短路径,食品的边缘轮廓某一点到食品图像的边缘轮廓之间的距离为食品的边缘轮廓某一点到食品图像的边缘轮廓之间的最短距离。
通过计算图像采集机构5与移动目标之间的最优移动路径,控制十字滑台4按照最优移动路径往移动目标移动,然后采集食品图像知道所采集到的食品图像符合预设标准,可以很方便地铜鼓图像采集机构5采集到完整的食品图像,以方便后续食品质量检测工作。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种基于机器视觉的食品质量快速检测装置
- 一种便于调节的食品质量快速检测用检测装置